
Recent Upgrades in a 2D Turbulent Transport Solver Based on a Hybrid Discontinuous Galerkin Method for the Simulation of Fusion Plasma in Tokamak

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Physical Model
2.1. Equations of the Model
2.2. Boundary Conditions
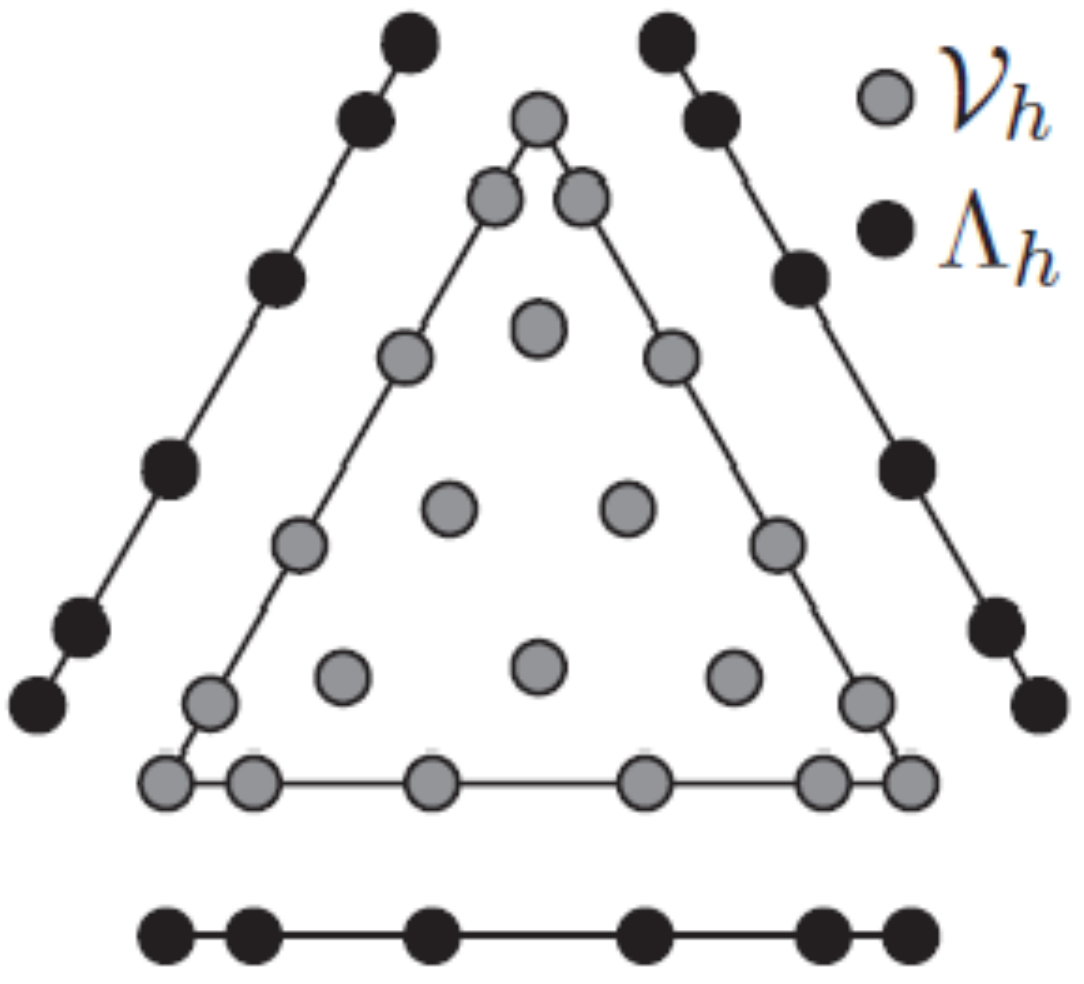
3. The Hybrid Discontinuous Galerkin Method
4. Implementation of Independent Nonlinear Diffusive Cross-Field Terms
4.1. Linearization
4.2. The New Discrete Linear System
4.3. Code Verification
4.4. Example of Simulation in the WEST Tokamak
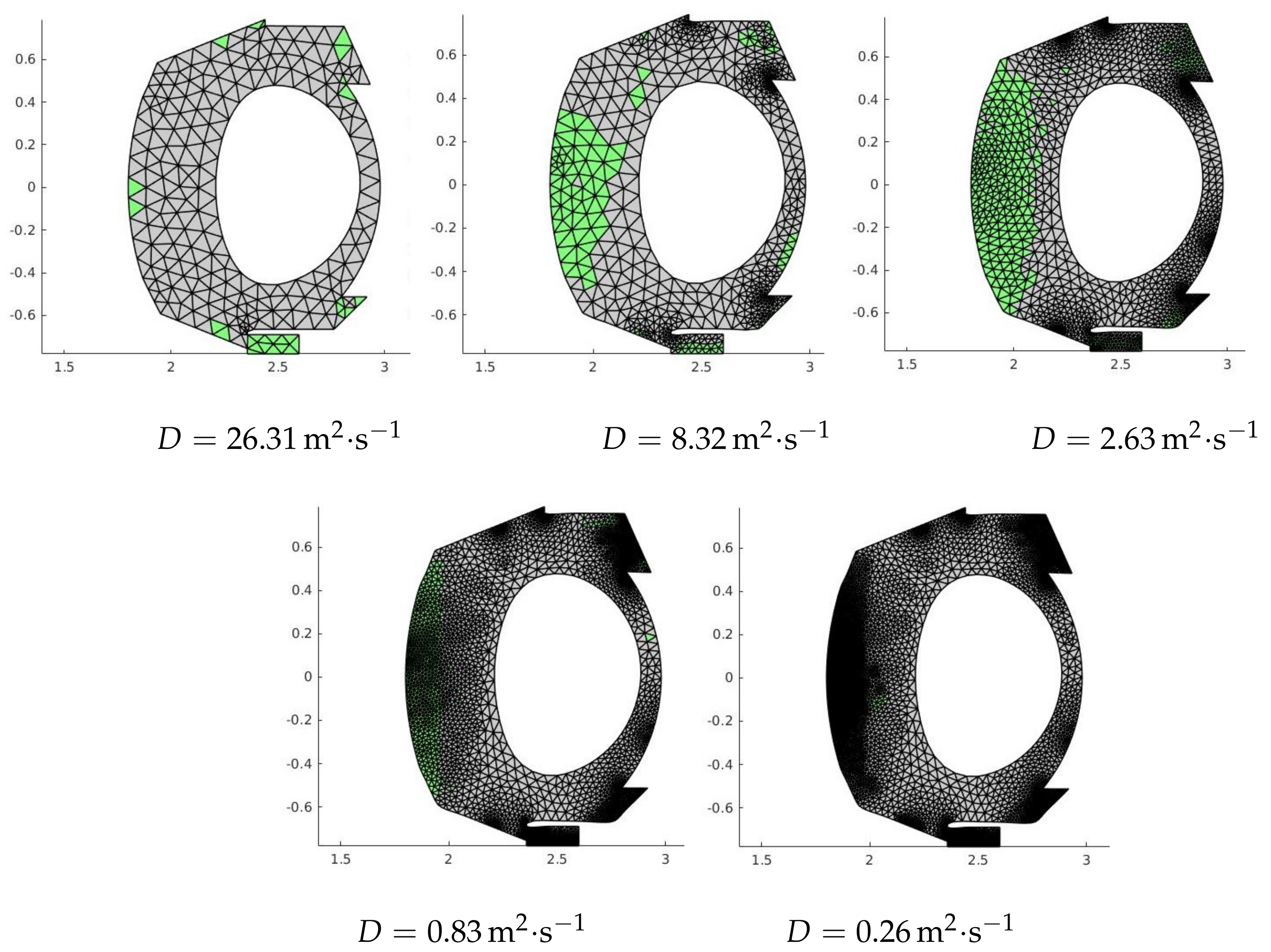
5. Spatial Adaptivity
5.1. Refinement Process Strategy
- Initialize the calculation with a rather coarse mesh and large values of cross-field diffusion coefficients;
- Convergence to the steady solution using Newton–Raphson iterations;
- -
- if convergence, computations are going on, lowering diffusion;
- -
- if non convergence, the refinement procedure is started;
- *
- Interpolation of the solution on the new mesh locally refined;
- *
- Convergence to the steady solution using Newton–Raphson iterations;
- Stop when diffusion coefficients reach the target values.
5.2. Oscillation-Based Error Indicator
5.3. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Equations in Conservative Variables
Appendix B. The HDG Solver
Appendix B.1. The Local Problem

Appendix B.2. The Global Problem
Appendix B.3. Discrete Form of the Weak Equations
References
- Loarte, A.; Lipschultz, B.; Kukushkin, A.S.; Matthews, G.F.; Stangeby, P.C.; Asakura, N.; Counsell, G.F.; Federici, G.; Kallenbach, A.; Krieger, K.; et al. Chapter 4: Power and particle control. Nucl. Fusion 2007, 47, S203–S263. [Google Scholar] [CrossRef] [Green Version]
- Simonini, R.; Corrigan, G.; Radford, G.; Spence, J.; Taroni, A. Models and numerics in the multi-fluid 2-d edge plasma code edge2d/u. Contrib. Plasma Phys. 1994, 34, 368–373. [Google Scholar] [CrossRef]
- Wiesen, S.; Reiter, D.; Kotov, V.; Baelmans, M.; Dekeyser, W.; Kukushkin, A.S.; Lisgo, S.W.; Pitts, R.A.; Rozhansky, V.; Saibene, G.; et al. The new solps-iter code package. J. Nucl. Mater. 2015, 463, 480–484. [Google Scholar] [CrossRef]
- Bufferand, H.; Ciraolo, G.; Marandet, Y.; Bucalossi, J.; Ghendrih, P.; Gunn, J.; Mellet, N.; Tamain, P.; Leybros, R.; Fedorczak, N.; et al. Numerical modeling for divertor design of the WEST device with a focus on plasma—Wall interactions. Nucl. Fusion 2015, 55, 053025. [Google Scholar] [CrossRef]
- Soler, J.A.; Schwander, F.; Giorgiani, G.; Liandrat, J.; Tamain, P.; Serre, E. A new conservative finite-difference scheme for anisotropic elliptic problems in bounded domain. J. Comput. Phys. 2020, 405, 109093. [Google Scholar] [CrossRef] [Green Version]
- Giorgiani, G.; Bufferand, H.; Schwander, F.; Serre, E.; Tamain, P. An Hybrid Discontinuous Galerkin method for tokamak edge plasma simulations in global realistic geometry. J. Comp. Phys. 2018, 374, 515–532. [Google Scholar] [CrossRef] [Green Version]
- D’Abusco, M.S.; Giorgiani, G.; Artaud, J.; Bufferand, H.; Ciraolo, G.; Ghendrih, P.; Serre, E.; Tamain, P. Core-edge 2D fluid modeling of full tokamak discharge with varying magnetic equilibrium: From WEST start-up to ramp-down. Nucl. Fusion 2022. accepted. [Google Scholar]
- Giorgiani, G.; Bufferand, H.; Schwander, F.; Serre, E.; Tamain, P. A high-order non field-aligned approach for the discretization of strongly anisotropic diffusion operators in magnetic fusion. Comput. Phys. Commun. 2020, 254, 107375. [Google Scholar] [CrossRef]
- Braginskii, S.I. Transport processes in a plasma. Rev. Plasma Phys. 1965, 1, 205. [Google Scholar]
- Stangeby, P.C. The Plasma Boundary of Magnetic Fusion Devices; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Giorgiani, G.; Camminady, T.; Bufferand, H.; Ciraolo, G.; Ghendrih, P.; Guillard, H.; Heumann, H.; Nkonga, B.; Schwander, F.; Serre, E.; et al. A new high-order fluid solver for tokamak edge plasma transport simulations based on a magnetic-field independent discretization. Contrib. Plasma Phys. 2018, 58, 688–695. [Google Scholar] [CrossRef] [Green Version]
- Giorgiani, G.; Bufferand, H.; Ciraolo, G.; Serre, E.; Tamain, P. A magnetic-field independent approach for strongly anisotropic equations arising plasma-edge transport simulations. Nucl. Mater. Energy 2019, 19, 340–345. [Google Scholar] [CrossRef]
- Horton, L.D.; Chankin, A.V.; Chen, Y.P.; Conway, G.D.; Coster, D.P.; Eich1, T.; Kaveeva, E.; Konz, C.; Kurzan, B.; Neuhauser, J. Characterization of the H-mode edge barrier at ASDEX Upgrade. Nucl. Fusion 2005, 45, 856. [Google Scholar] [CrossRef]
- Piraccini, G.; Schwander, F.; Serre, E.; Giorgiani, G.; D’Abusco, M.S. Spatial adaptivity in SOLEDGE3X-HDG for edge plasma simulations in versatile magnetic and reactor geometries. Contrib. Plasma Phys. 2022, e202100185. [Google Scholar] [CrossRef]
- Dobrzynski, C.; Frey, P. Anisotropic Delaunay mesh adaptation for unsteady simulations. In Proceedings of the 17th International Meshing Roundtable, Pittsburgh, PA, USA, 12–15 October 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 177–194. [Google Scholar]
- Dapogny, C.; Dobrzynski, C.; Frey, P. Three-dimensional adaptive domain remeshing, implicit domain meshing, and applications to free and moving boundary problems. J. Comput. Phys. 2014, 262, 358–378. [Google Scholar] [CrossRef] [Green Version]
- Knupp, P.M. Algebraic mesh quality metrics for unstructured initial meshes. Finite Elem. Anal. Des. 2003, 39, 217–241. [Google Scholar] [CrossRef]
- Babuška, I.; Guo, B.Q. Approximation properties of the h-p version of the finite element method. Comput. Methods Appl. Mech. Eng. 1996, 133, 319–346. [Google Scholar] [CrossRef]
- Oden, J.T.; Demkowicz, L.; Rachowicz, W.; Westermann, T.A. Toward a universal h-p adaptive finite element strategy, Part 2. A posteriori error estimation. Comput. Methods Appl. Mech. Eng. 1989, 77, 113–180. [Google Scholar] [CrossRef]
- Ghendrih, P.; Bodi, K.; Bufferand, H.; Chiavassa, G.; Ciraolo, G.; Fedorczak, N.; Isoardi, L.; Paredes, A.; Sarazin, Y.; Serre, E.; et al. Transition to supersonic flows in the edge plasma. Plasma Phys. Control Fusion 2011, 53, 054019. [Google Scholar] [CrossRef]
- Bufferand, H.; Ciraolo, G.; Dif-Pradalier, G.; Ghendrih, P.; Tamain, P.; Marandet, Y.; Serre, E. Magnetic geometry and particle source drive of supersonic divertor regimes. Plasma Phys. Control. Fusion 2014, 56, 122001. [Google Scholar] [CrossRef]
- Nguyen, N.C.; Peraire, J.; Cockburn, B. An implicit high-order hybridizable discontinuous Galerkin method for nonlinear convection–diffusion equations. J. Comput. Phys. 2009, 228, 8841–8855. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D | nDOF | h-Refinement (Time (s)) | No h-Refinement (Time (s)) | Time Saving | |
|---|---|---|---|---|---|
| 26.31 | 388 | 5820 | 13.96 | 14.20 | +2% |
| 8.32 | 1192 | 17,880 | 30.84 | 35.57 | +13% |
| 2.63 | 3219 | 49,590 | 126.51 | 131.67 | +4% |
| 0.83 | 6066 | 114,120 | 203.75 | 280.78 | +28% |
| 0.26 | 10,032 | 150,480 | 285.61 | 366.41 | +23% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piraccini, G.; Capasso, M.; Scotto D’Abusco, M.; Giorgiani, G.; Schwander, F.; Serre, E.; Bufferand, H.; Ciraolo, G.; Tamain, P. Recent Upgrades in a 2D Turbulent Transport Solver Based on a Hybrid Discontinuous Galerkin Method for the Simulation of Fusion Plasma in Tokamak. Fluids 2022, 7, 63. https://doi.org/10.3390/fluids7020063
Piraccini G, Capasso M, Scotto D’Abusco M, Giorgiani G, Schwander F, Serre E, Bufferand H, Ciraolo G, Tamain P. Recent Upgrades in a 2D Turbulent Transport Solver Based on a Hybrid Discontinuous Galerkin Method for the Simulation of Fusion Plasma in Tokamak. Fluids. 2022; 7(2):63. https://doi.org/10.3390/fluids7020063
Chicago/Turabian StylePiraccini, Giacomo, Marcello Capasso, Manuel Scotto D’Abusco, Giorgio Giorgiani, Frédéric Schwander, Eric Serre, Hugo Bufferand, Guido Ciraolo, and Patrick Tamain. 2022. "Recent Upgrades in a 2D Turbulent Transport Solver Based on a Hybrid Discontinuous Galerkin Method for the Simulation of Fusion Plasma in Tokamak" Fluids 7, no. 2: 63. https://doi.org/10.3390/fluids7020063
APA StylePiraccini, G., Capasso, M., Scotto D’Abusco, M., Giorgiani, G., Schwander, F., Serre, E., Bufferand, H., Ciraolo, G., & Tamain, P. (2022). Recent Upgrades in a 2D Turbulent Transport Solver Based on a Hybrid Discontinuous Galerkin Method for the Simulation of Fusion Plasma in Tokamak. Fluids, 7(2), 63. https://doi.org/10.3390/fluids7020063