2. Methodology
The high-speed train geometry used in this study is the same as that employed in Wang et al. [
7]: a simplified single-carriage replication of a Deutsche Bahn Inter-City Express 3 or ICE-3 high-speed train with a length-width-height ratio of approximately 50:3:4, compared to a general configuration of 200:3:4. The reduction in relative length was to keep computational costs under control, with an estimated reduction in computational run-time of a factor of 4 and the required memory a factor of 2.5. The train is placed on a single-track ballast and rail ground configuration. This layout is shown in
Figure 1.
The ground surface was flat, and no crosswind was present. The inlet of the domain was one train length forward of the nose of the model, and the outlet was positioned three train lengths from the tail of the train. This distance allows for slipstream structures to develop and persist sufficiently far downstream so that the maximal slipstream velocities along set measurement lines are recorded well before the wake reaches the outlet. This was verified through additional simulations using longer domains in Dunlop [
9]. All designs were tested subject to a moving floor condition; therefore, in this frame of reference, the surfaces that constitute the train model remain stationary, while the flow moves past the train at the specified inlet velocity with matching linear translational motion of the ground, ballast and rail surfaces. The width and height of the domain are 40 and 20 train widths, respectively, yielding a blockage ratio of 0.17%. In the following, the width of the train is used as the reference length (
).
The investigation was conducted using ANSYS FLUENT V19.2 at a Reynolds number of 720,000, matching the scale-model wind-tunnel studies of Bell et al. [
1], Bell et al. [
3]. and Bell et al. [
4], although this is considerably lower than a typical operational Reynolds number of approximately 20,000,000. A constant velocity was used at the inlet, and a turbulence intensity of 1% was applied, which is typical of turbulence levels of wind-tunnel facilities. The outlet was defined as a zero pressure outlet, and with zero-gradient velocity components, i.e.,
, with
the outflow surface normal. The flow state was initialised using FLUENT hybrid initialisation.
On the basis of successful simulations for the ICE-3 high-speed train base model presented in Wang et al. [
7], an improved delayed detached eddy simulation (IDDES) turbulence model incorporating the shear-stress transport (SST)
k–
Reynolds-Averaged Navier–Stokes (RANS) model for near-wall zones was used for all simulations reported here. Essentially, the IDDES model uses large-eddy simulation (LES) away from boundaries and blends this with a RANS simulation of near-wall regions. This approach is a development of the delayed eddy simulation (DES) method originally proposed by Spalart et al. [
10] used to model separated flows.
The SST
k–
turbulence model employed for the RANS component of the IDDES model is defined as follows, partially symbolically;
k is the turbulent kinetic energy per unit mass, and
is the specific dissipation rate.
In this case, the turbulent viscosity is given by for the standard k– model. There are recognisable terms here: the local rate of change (1st term); the advective rate of change (2nd term); and molecular and turbulent diffusion (last terms) for both k and . There are also terms representing turbulent kinetic energy production () and dissipation (), with similar terms in the specific dissipation equation.
The remaining term () switches between the k– model near the wall and the k– equation further away, taking into account the strengths of each model to treat flow over different parts of the flow domain. Function is a blending function to switch between these modes. In addition, the SST model adjusts the turbulent viscosity so that it obtains the correct physical behaviour in adverse pressure gradient regions, where the standard approach results in delayed separation. Thus, the SST k– model gives improved prediction of separation in adverse pressure gradients, which is certainly a useful feature for predicting separation towards the rear for a streamlined high-speed train.
The key factor in the success or otherwise of DES modelling is determining when to switch between the RANS and LES models at the edge of the boundary layer. This is typically determined by a modified length scale
that is dependent on the distance to the closest point on the wall (
d), an empirical constant (
) of 0.65, and the maximal local cell size (
), with
. Delayed DES (DDES) varies this length scale by adding a shielding function (
) to ensure that LES is not activated within the boundary layer:
Lastly, IDDES introduces wall-modelled LES (WMLES), which allows for the outer regions of a boundary layer to be solved using LES when the grid resolution is sufficient, while DDES is employed when it is not. The full details of the IDDES method are provided in the following references: Shur et al. [
11], Gritskevich et al. [
12] and Saini et al. [
13], with the implementation in ANSYS FLUENT presented in [
14].
The iterative time-stepping approach was used to evolve the flow with up to 30 inner iterations per time step. The time step was selected on the basis of the results of Wang et al. [
7], where minimal variation was observed in slipstream and drag predictions when the time step was varied by an order of magnitude between 0.025 and 0.0025
. As such, a time step of 0.033
was selected, and this time step size is equivalent to the 0.025
value presented in Wang et al. [
7], as that study used the height rather than width of the vehicle as the reference length, and switching to width allowed for more near wake points to be sampled as simple functions of the reference length. A sampling period of 600
was utilised for the collection of data presented below. This equates to the fluid passing the train approximately 36 times.
The computational meshes utilised in the current study were modifications of that presented in Wang et al. [
7] (see
Appendix A for further details) adjusted to improve mesh resolution in proximity to control devices; specifically, significantly increased cell concentration was added in the vicinity of and surrounding control devices. These regions extended 1
upstream, 2
downstream, and 0.5
in the spanwise and vertical directions from the extremities of each device. The element size within these regions was 1/60
. All control devices also had reduced element sizing, with a face sizing of 1/120
and a reduced inflation layer growth rate of 1.1 compared to surrounding regions. The other key alteration to the mesh presented in Wang et al. [
7] was an increase in the size of the “train body” body of influence, which was increased in length from 25 to 51.66
, and in height from 2 to 2.66
, as preliminary testing presented in Dunlop [
9] indicated that significant high-velocity wake excursions were occurring outside the original high-resolution wake region when the control devices were added. The resulting meshes contained between 28 and 32 million cells, dependent on the complexity of the added control device.
Within the research presented in Dunlop [
9], 83 different devices were evaluated for their ability to modify and control the slipstream flow. This paper explores in detail the two most promising concepts that arose on the basis of the ability to reduce recorded slipstream velocity measures at common bystander locations.
The parallel fins were a pair of surface modifications applied to the rear of the train geometry, with the intent to shift the counter-rotating vortex cores towards one side of the model. This was expected to reduce the intensity of slipstream velocities on the other side of the model, termed the passenger side, while potentially increasing slipstream velocities on the side towards which the flow was redirected, termed the danger side. The fins were positioned on the downwards slope of the rear of the train geometry, with a flat upper surface emerging smoothly from the train geometry at a distance 15.33
downstream from the nose of the train, a steady height of 1.5
above the floor and extending 1.25
downstream (when no deflection angle was applied), until ceasing at a right angle down to the surface of the initial geometry. The fins were 1/120
thick and had a base spanwise displacement of 1/8
from the centre-plane, placing the pair of fins 1/4
apart before the deflection was applied around the centre-point. For the case presented in the results section, this rotation was 7 degrees in magnitude. A rear view of this device is seen in
Figure 2a, while
Figure 2c shows a side view of the fins prior to rotation.
The second means by which the flow was altered was through the injection of swirling flow at the tail of the train, with the intention of counteracting the circulation generated by the counter-rotating vortex core pair that formed in the baseline train wake. To achieve this, a set of flow injection regions were generated at the tail of the train, defined by the intersection of cylinders projected in the stream-wise direction. Each cylinder was centred at a point 1
above the ground, 1/4
from the centre-plane in the spanwise direction and with a diameter of 1/5
. These circulating flow injection ports are illustrated in
Figure 2b.
The intent behind this design was not to inject flow at a significantly greater velocity than the surrounding flow, as the primary variable of interest was the circulation of the injected flow. However, too-low injection velocity would result in circulation failing to consistently propagate downstream. In the preliminary testing of Dunlop [
9], streamwise injection velocities were tested with no added circulation to establish an injection velocity which matched the baseline flow in the near wake to within 2%. As a result of this testing, a speed of 5/7
was selected for all cases. In an attempt to cancel or control the naturally present vortex structures, the direction of the injected circulation was reversed across the spanwise symmetry plane. For all cases investigated the radial velocity of the flow from the injection port was set as zero and a turbulence intensity of 5% and a turbulent viscosity ratio of 10 utilised, noting that the predictions are unlikely to be strongly affected by the exact values chosen. After varying the circulation intensity, by modifying the tangential velocity of the injected flow from 0 to 1/2
, 2/7
was observed to produce the greatest reduction in the recorded slipstream velocity measures. As such, this is the value used for results presented below. The full results of these preliminary tests can be found in Dunlop [
9].
To quantify the effect of the control devices, three parameters are discussed: near-wake x vorticity, the proper orthogonal decomposition (POD) of the slipstream velocity in downstream cross-planes, and the slipstream velocity measures along the test lines. The near wake x-vorticity is the time-averaged vorticity restricted to a plane perpendicular to the streamwise direction, to provide a clear visual indication of the effect on the intensity and location of the counter-rotating vortex cores.
The dataset used in POD analysis was that of the slipstream velocity at eleven vertical planes from 2 to 12
downstream of the train rear. The deconstruction employed the approach defined in Kutz et al. [
15]. Each plane for which POD data were exported extended 2
in both spanwise directions from the centre plane, and 8/3
vertically from the ground, although when presented visually, this area was trimmed to focus on regions with noticeable variation.
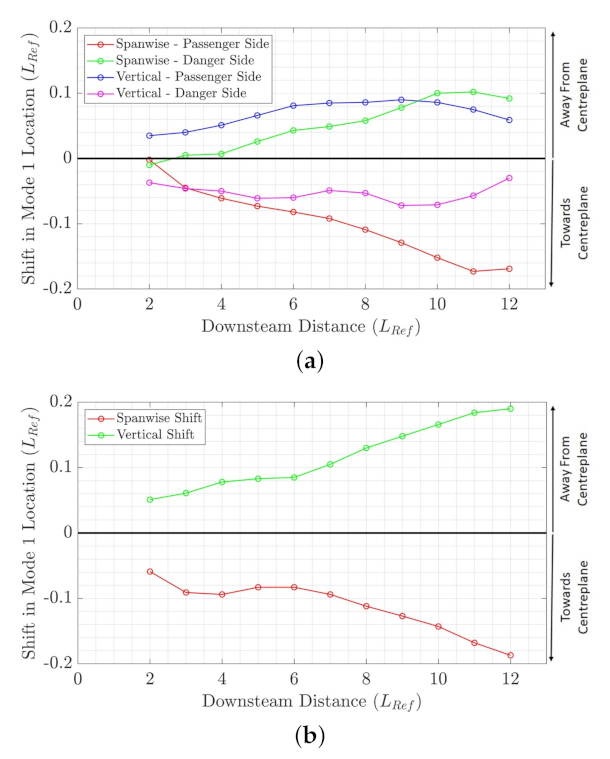
This analysis was utilised for obtaining mean slipstream velocity fields, to produce differential profiles from the unmodified baseline case, and to illustrate the variation in energy and location of the highest-order mode (or mode 1) of the slipstream velocity, which had been shown to be a strong indicator of the counter-rotating vortex cores. An example of a mean and mode 1 profile is shown in
Figure 3 for the baseline case.
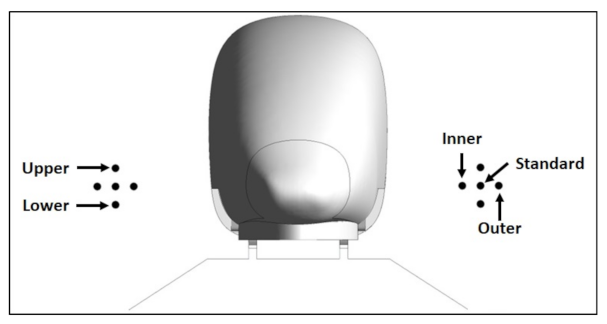
To obtain slipstream velocity measure data, five sample lines were generated running from the inlet to the outlet on each side of the train. The standard lines were positioned 1
from the centre plane of the model and 0.4
above the platform on both sides of the train, while each of the other four lines were positioned a distance of 0.1
in either the spanwise or vertical direction from these standard lines. These locations are shown in
Figure 4.
By convention, the vertical (
z) velocity component was not used in the calculation of the slipstream velocities. It is defined by
where
and
are the streamwise and spanwise velocity components measured in the train’s frame of reference. The measure of slipstream velocity for each pair of lines was generated by recording the maximum velocity at the conclusion of each time-step, taking the mean of this sample and adding two standard deviations. When presented graphically, an error bar indicating a 99.7% confidence interval was applied on the basis of the convergence of data from a wider variety of designs than tat presented in this paper Dunlop [
9].





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









