

Modeling and Experimental Characterization of a Clutch Control Strategy Using a Magnetorheological Fluid




Abstract
:1. Introduction
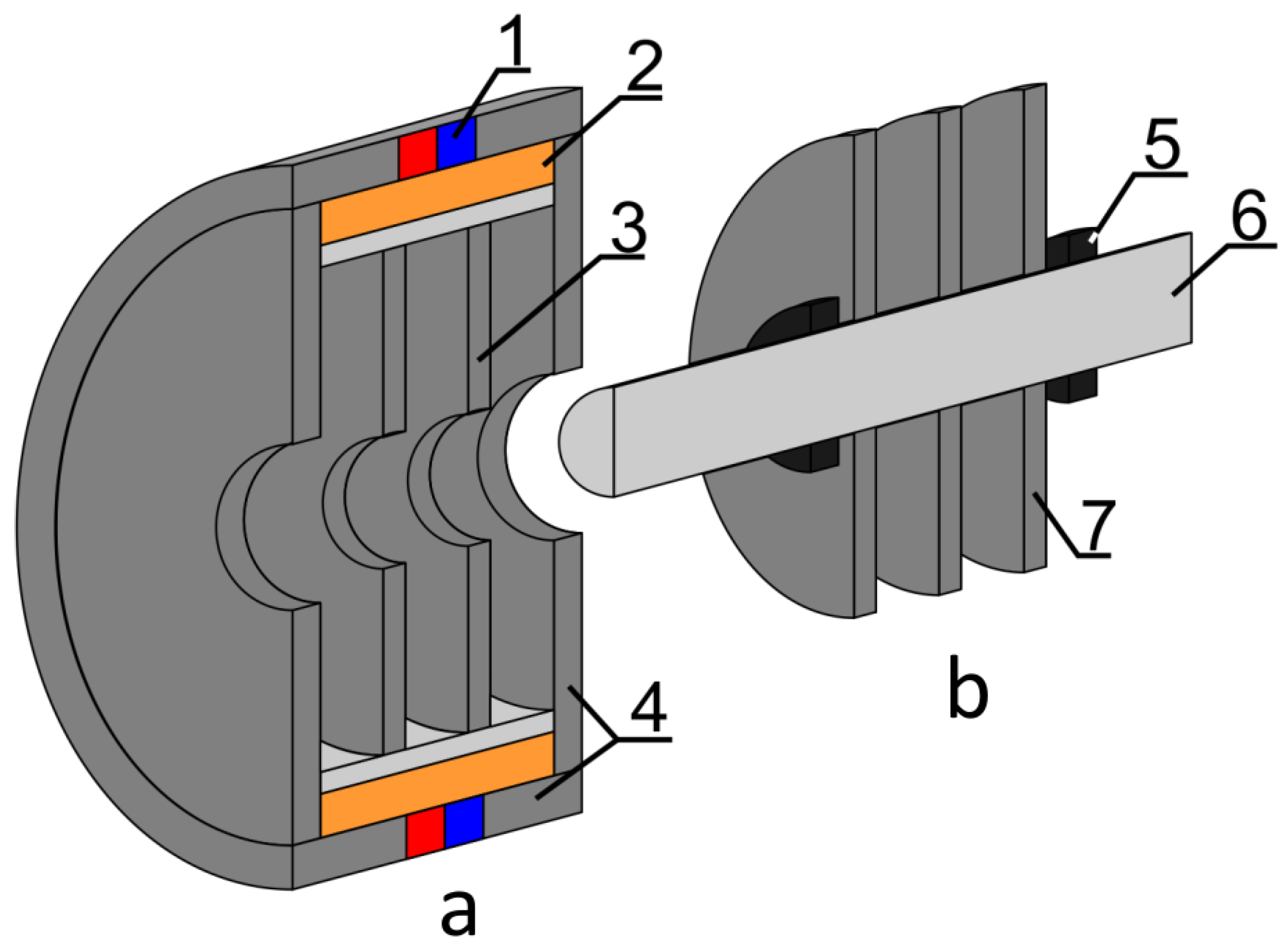
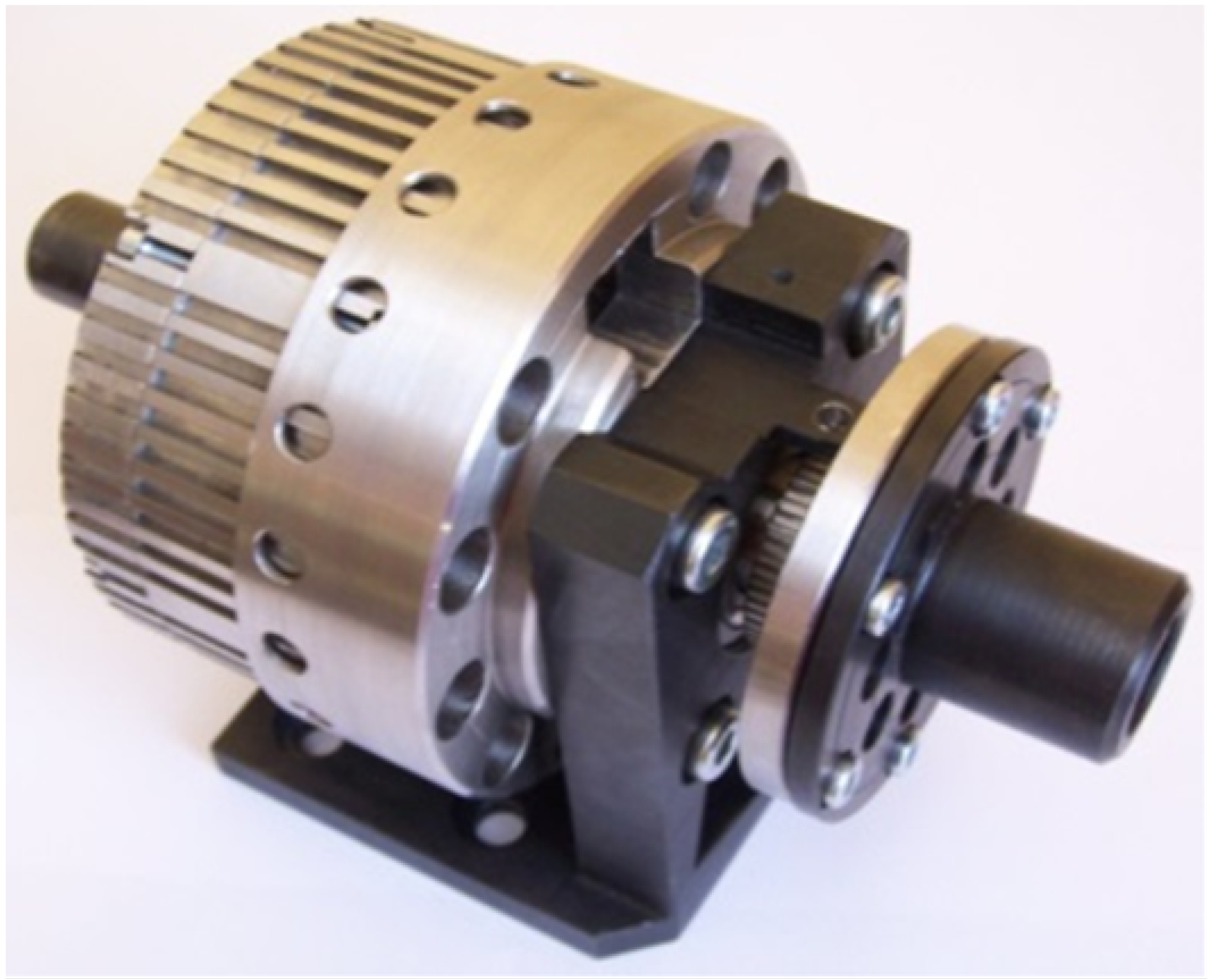
2. Magnetorheological Clutch Design
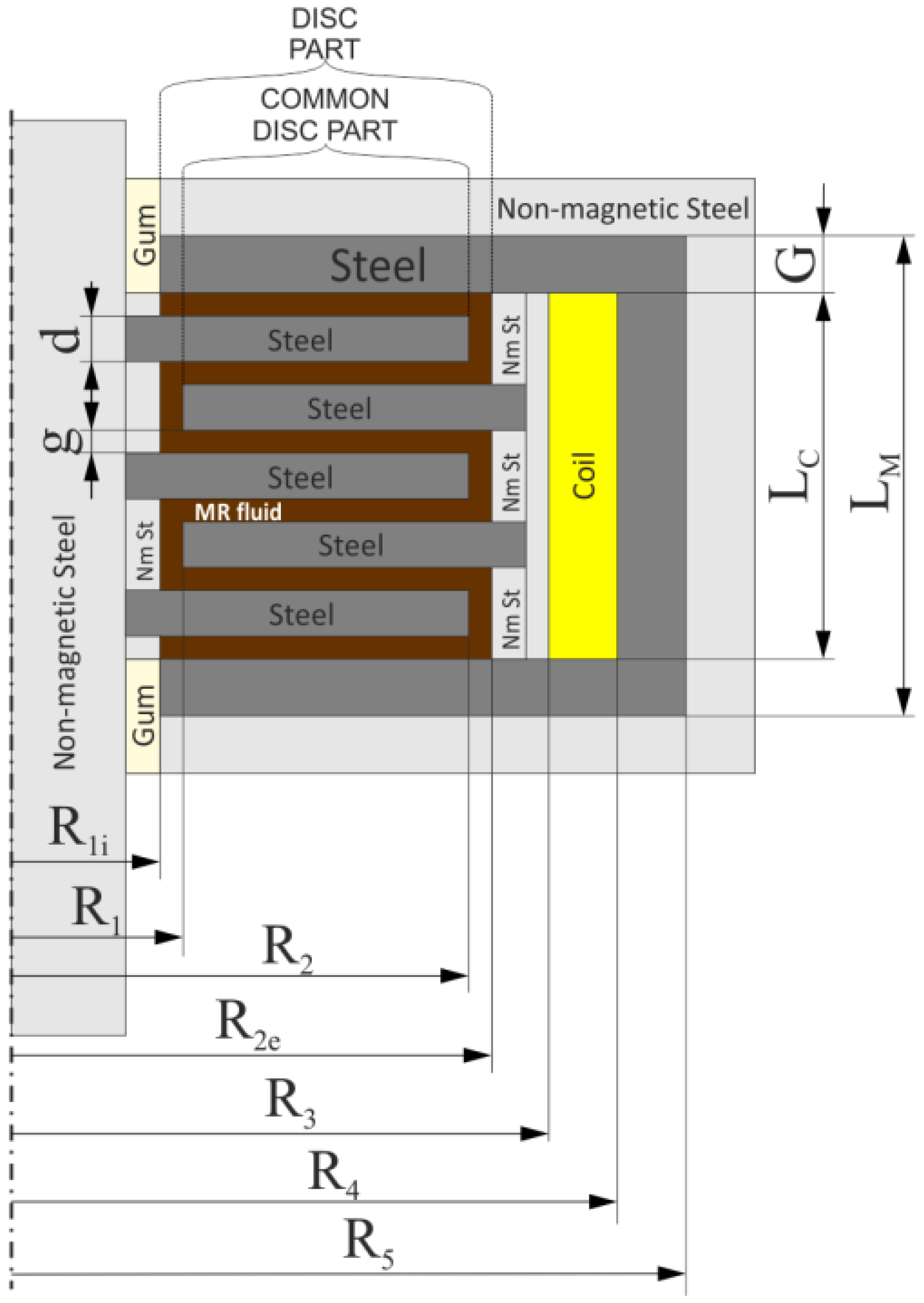
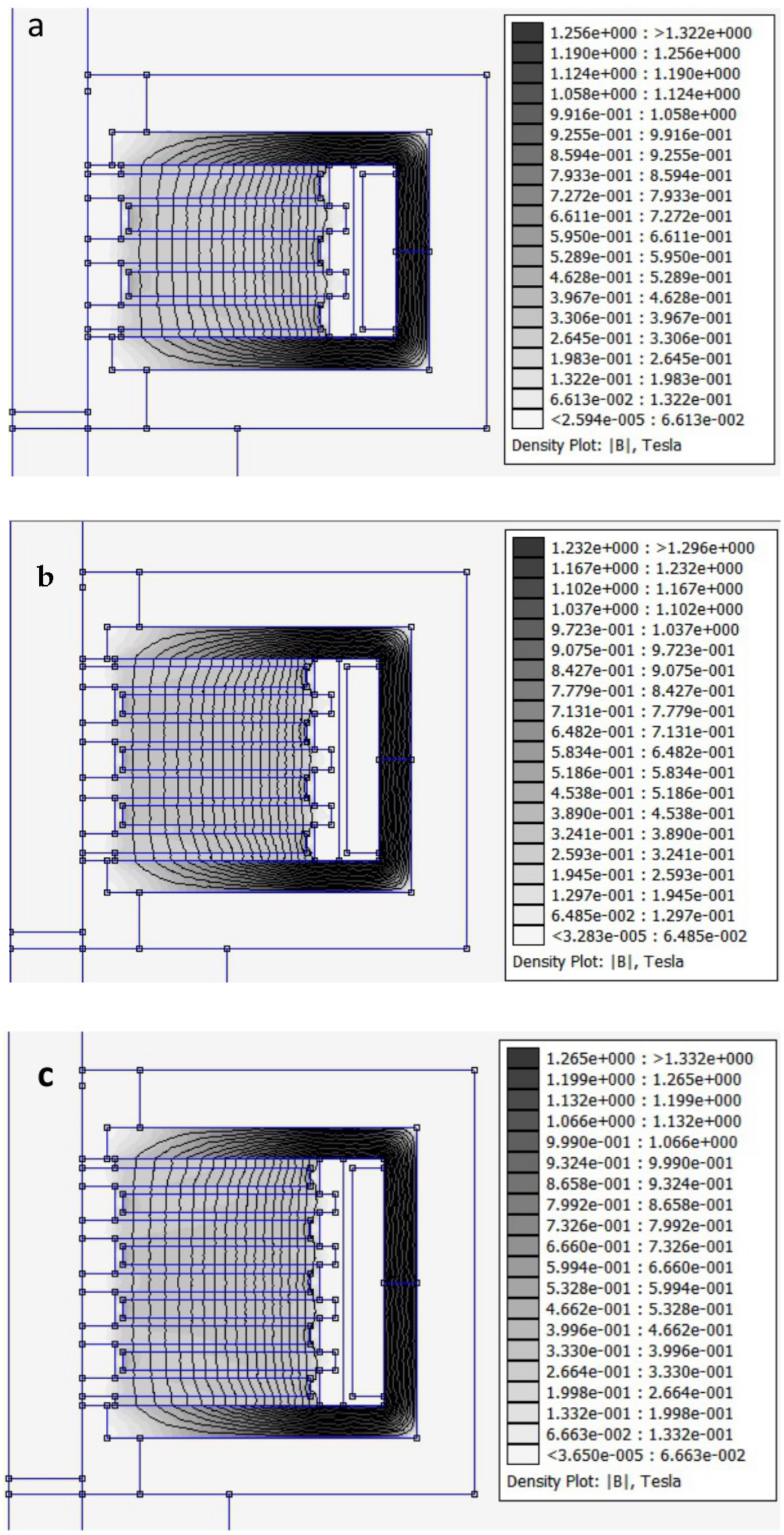
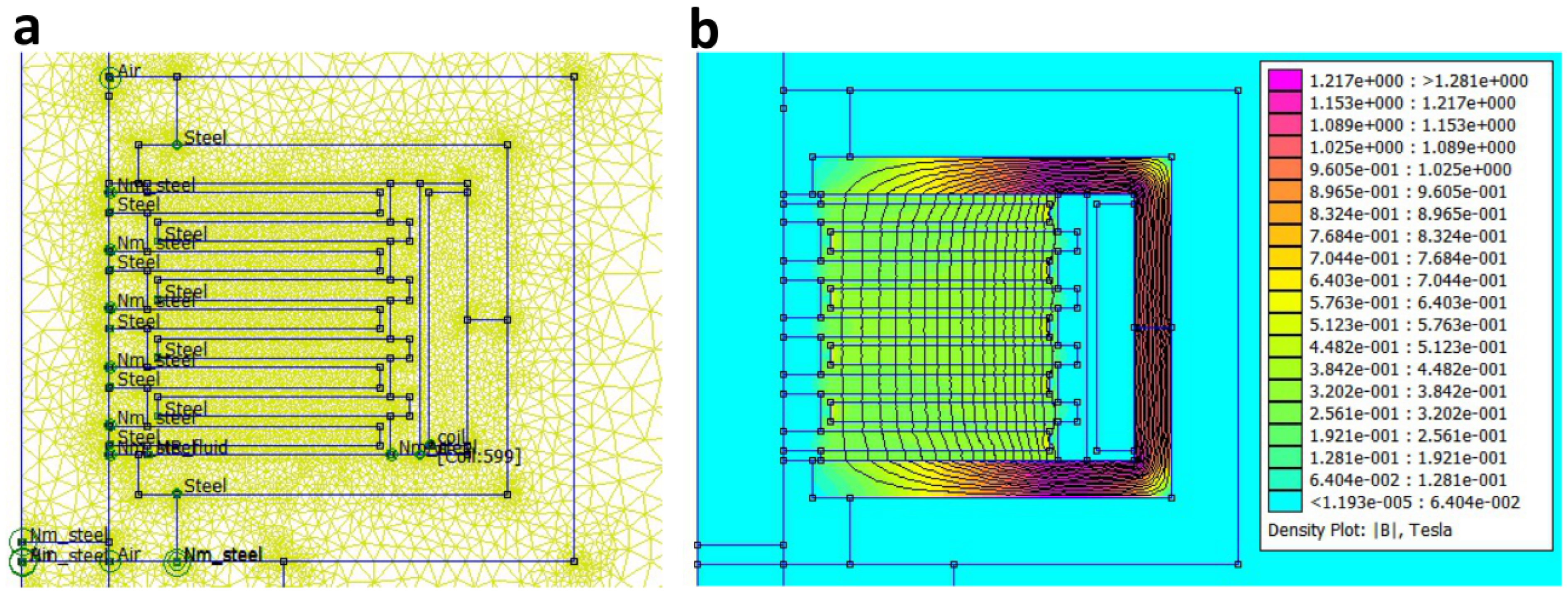
2.1. The Multi Disch MR Clutch Finite Element Model (FEM) for Magnetic Field Calculations
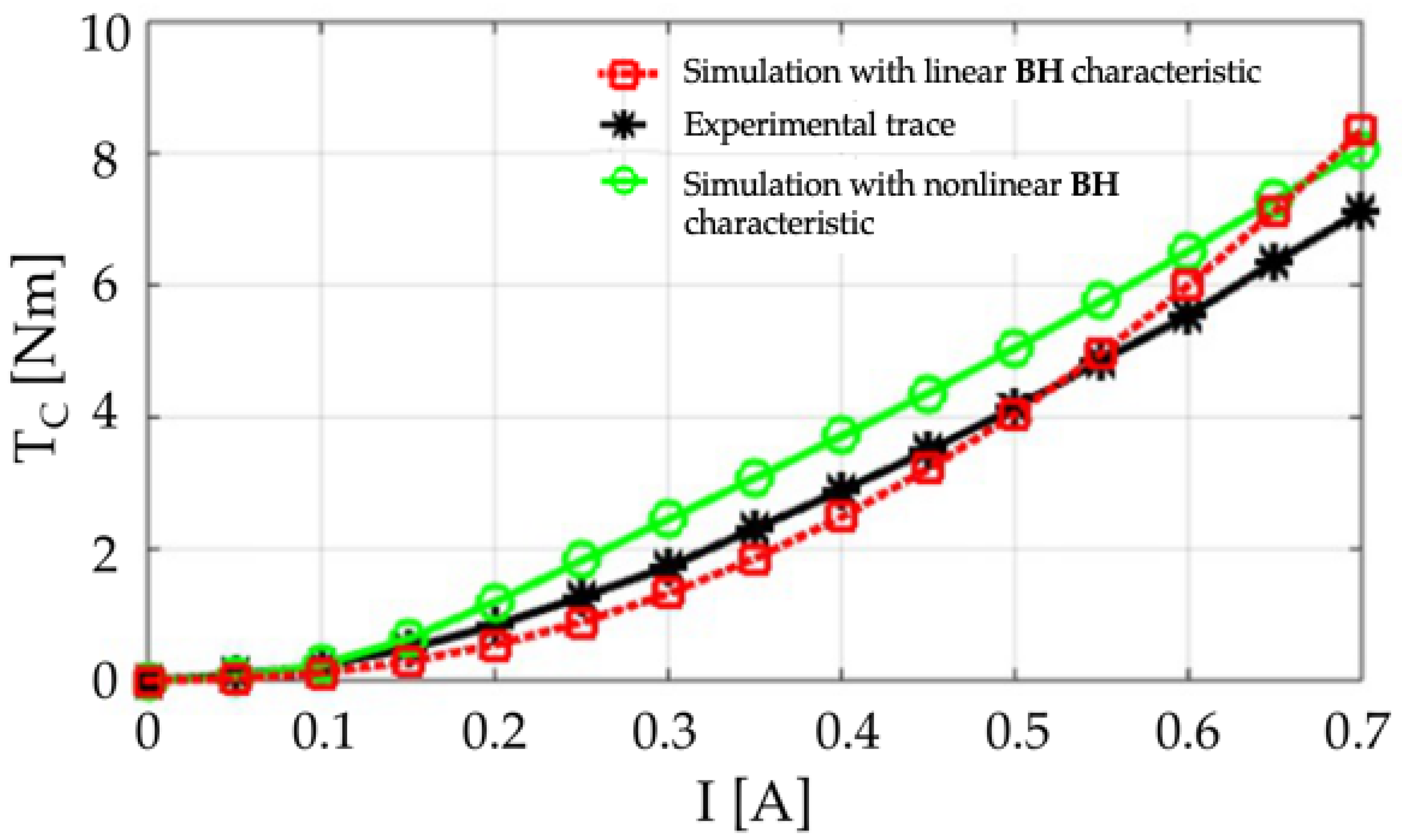
- Nonlinear BH characteristic of the magnetic materials forming the magnetic core.
2.2. Clutch Torque Calculation
3. Clutch Control by Means of Magnetorheological Fluids
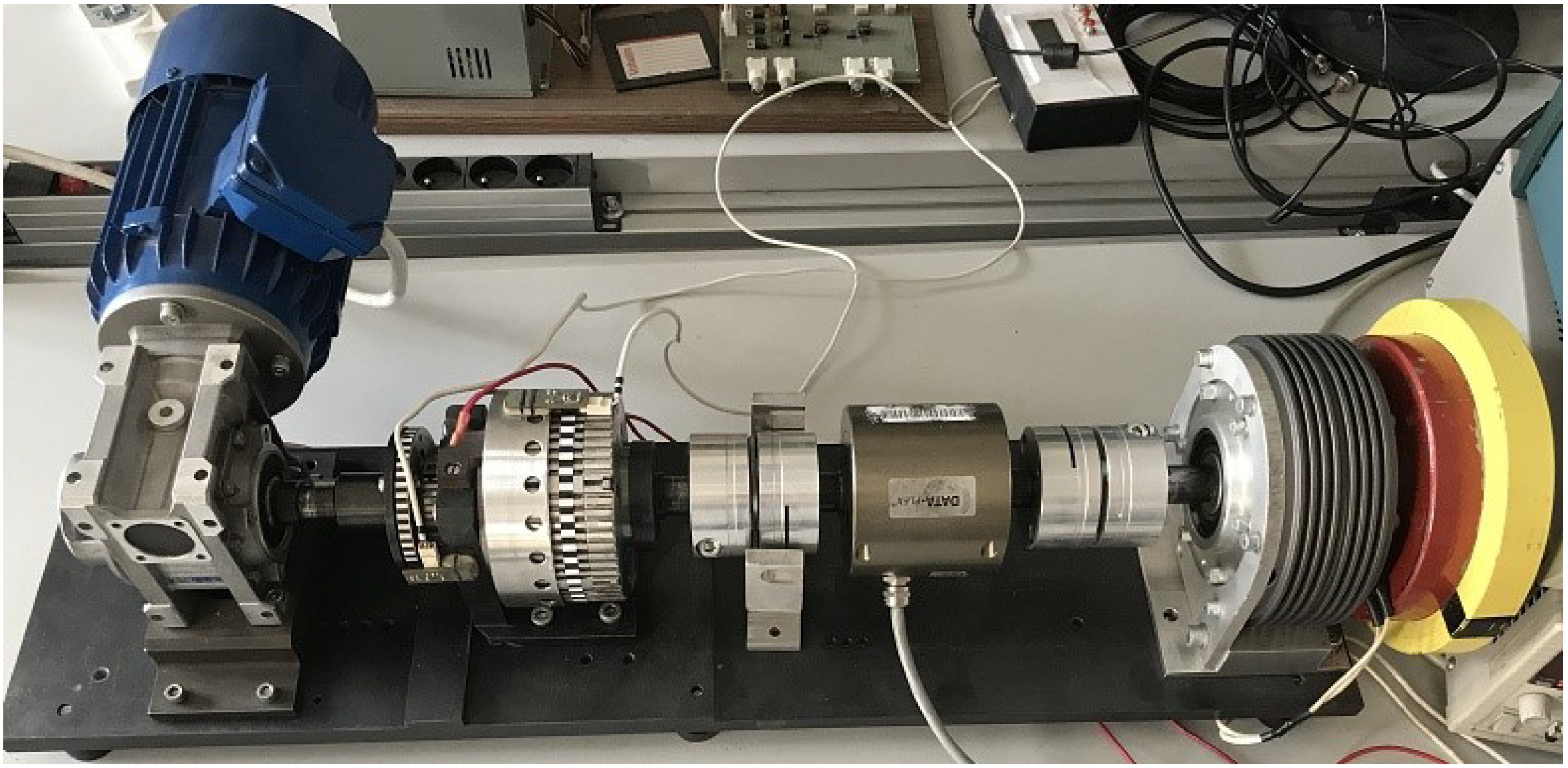
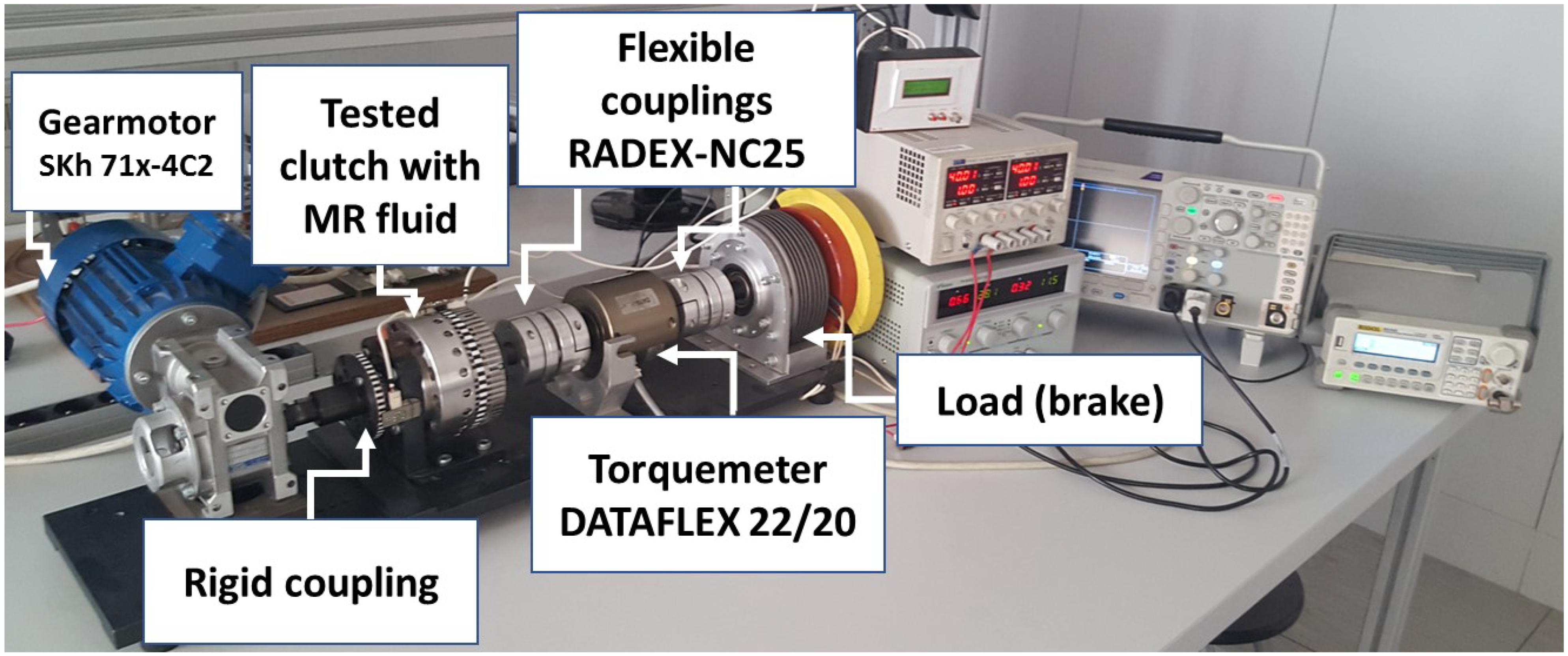
3.1. Experimental Set-Up for MR Clutch Control Characterization
- 1.
- Tested clutch.
- 2.
- DATAFLEX 22/20 torque meter.
- 3.
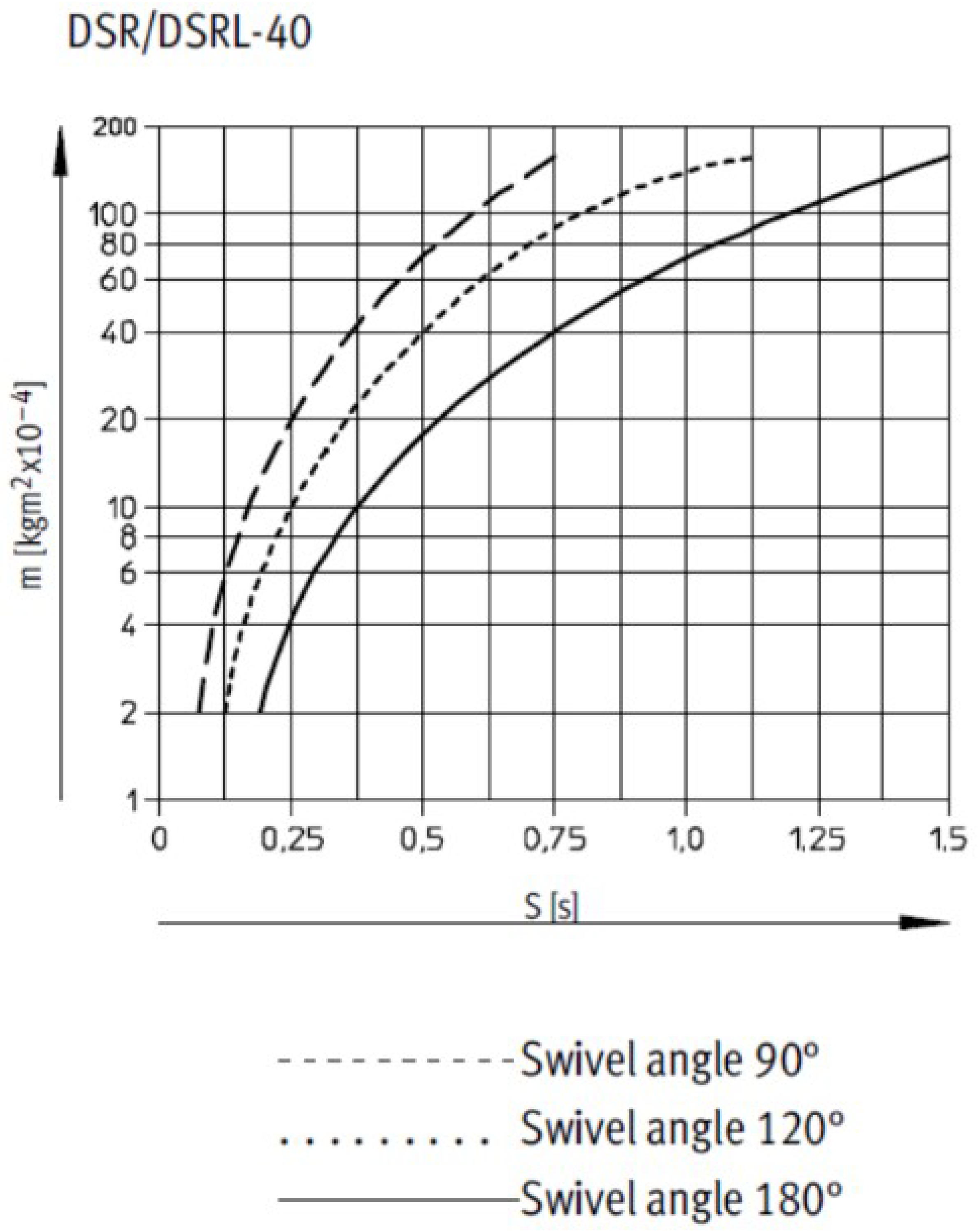
- FESTO DSR-16-180-P pneumatic rotary actuator to create the load moment for the clutch (static tests and low frequency pulsations).
- 4.
- FUMO VER-30H-20-6 powder brake (generation of adjustable braking torque).
- 5.
- Load in the form of an inertia disc (passive load).
- 6.
- Flexible backlash-free couplings RADEX-NC 25 EK.
- 7.
- Coupling connecting the actuator with the tested clutch.
- 8.
- Mounting plate.
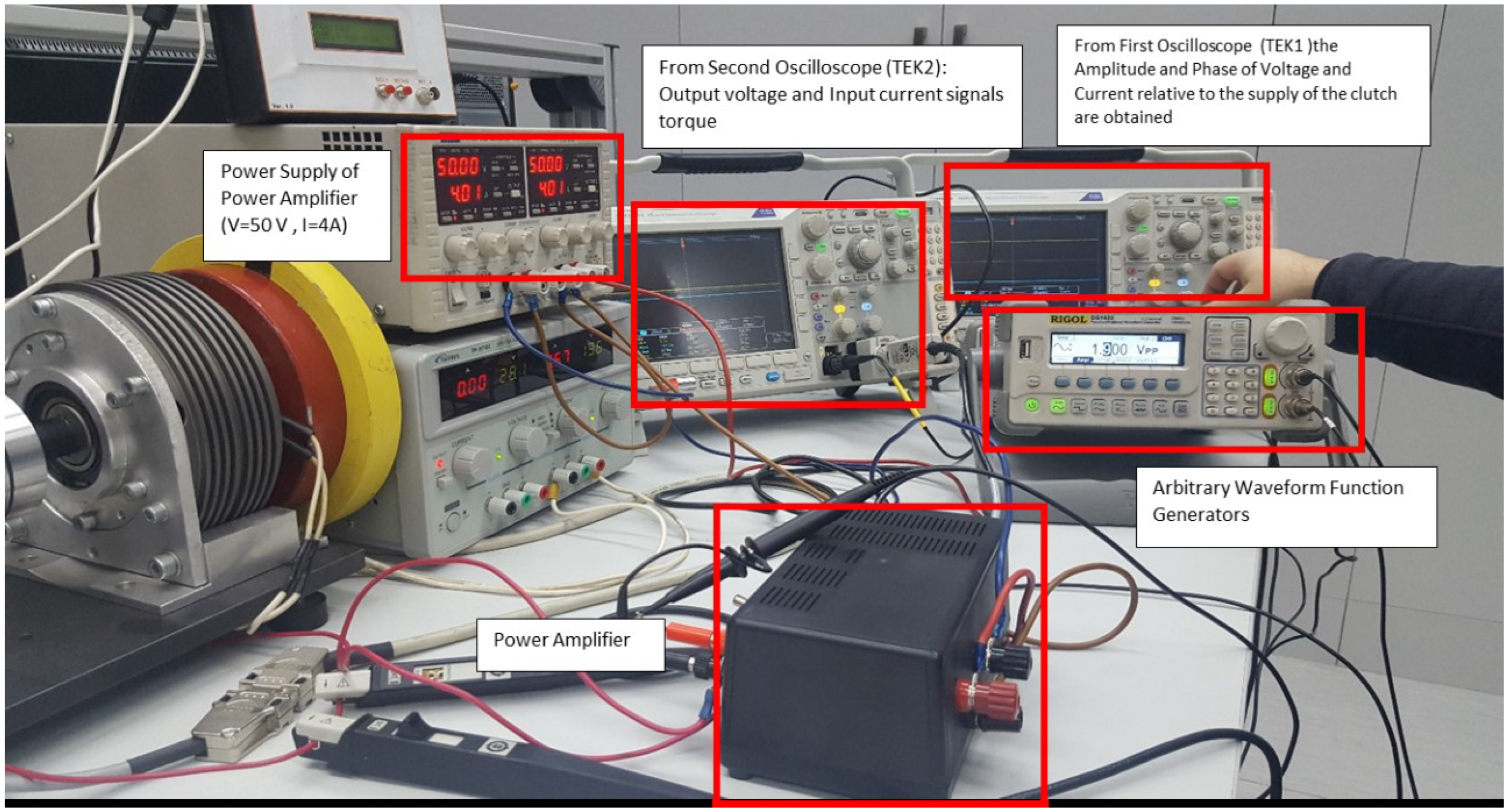
- The electric circuit—coil voltage and current;
- The mechanical system—momentum coupling.
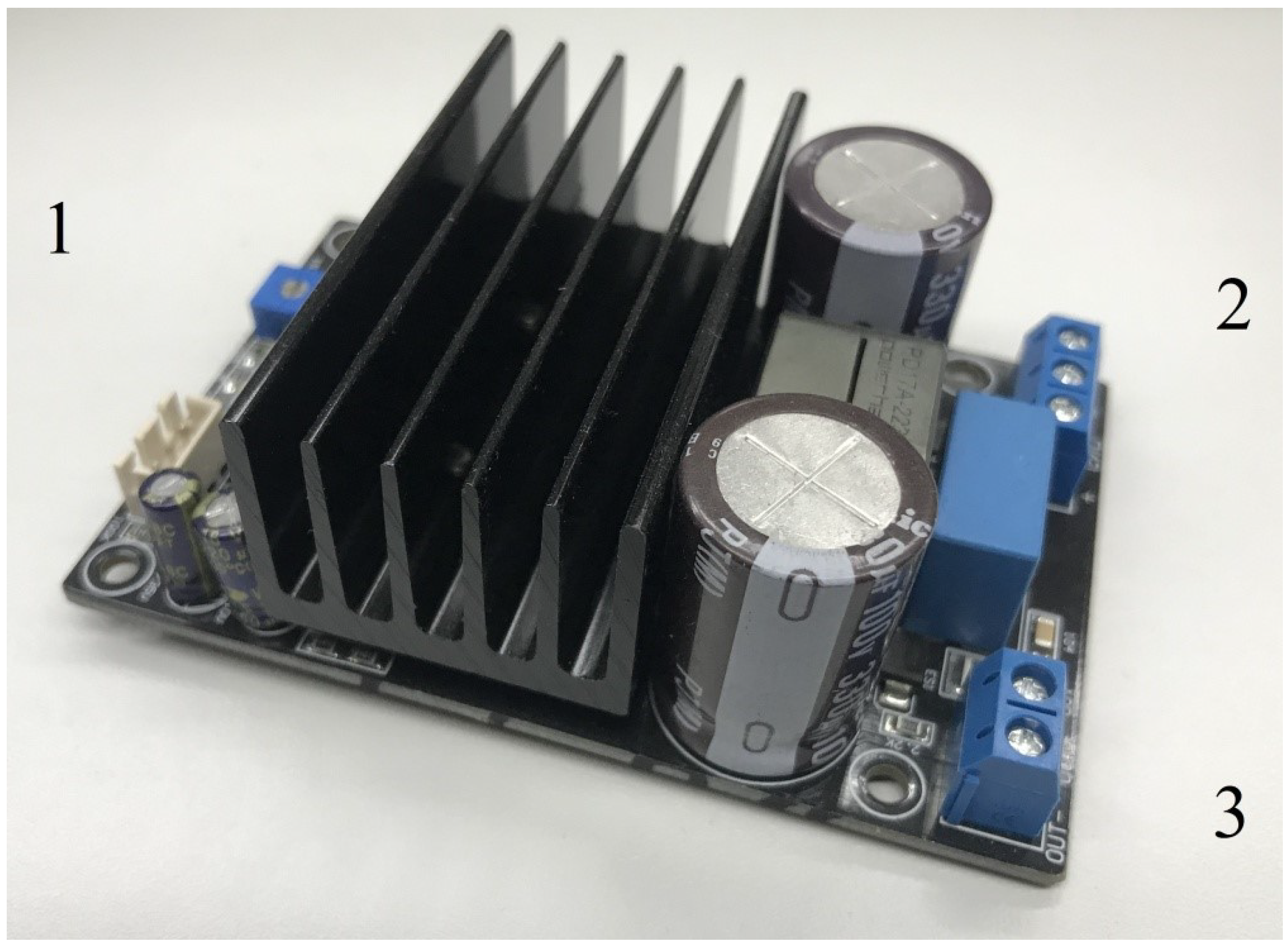
3.2. Experimental Set-Up Modifications for Magnetorheological Coupling Measurements in the Dynamic State
- Symmetrical power supply voltage from +/− 40 V to +/− 60 V;
- Recommended supply voltage +/− 50 V;
- Frequency range up to 20 kHz;
- Output power 200 W;
- Maximum efficiency ;
- Maximum output current 8 A.
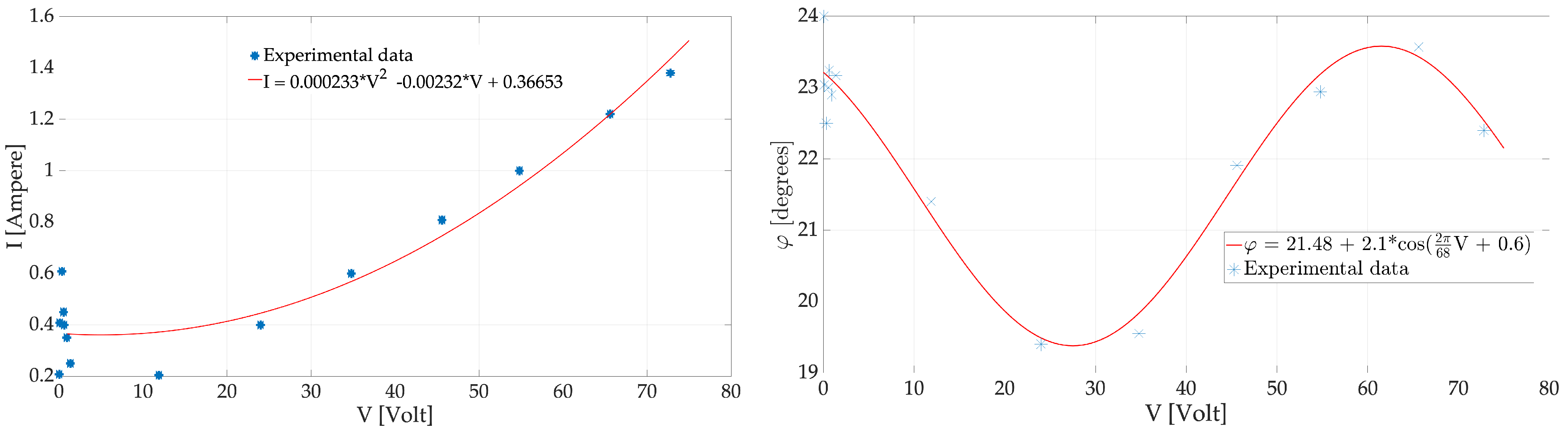
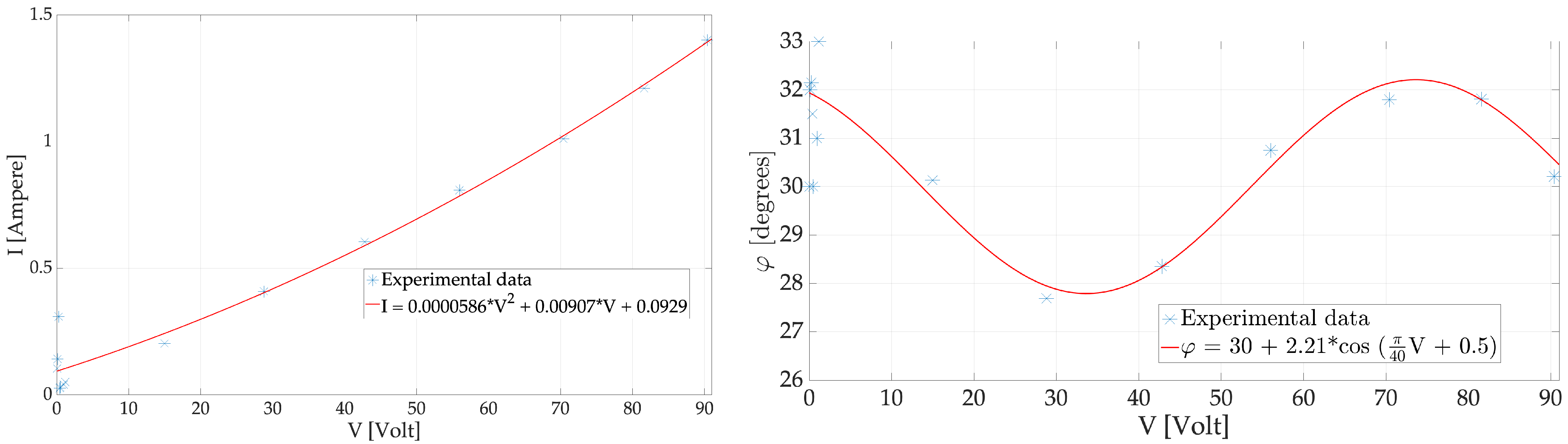
4. Laboratory Experiments Carried Out, Results and Clutch Control Model
4.1. Experiments Conducted in Static Mode
4.2. Experiments Conducted in Dynamic Mode
4.3. Clutch Control Model and Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- George, L.K.; Tamilarasan, N.; Thirumalini, S. Design and analysis of magneto rheological fluid brake for an all terrain vehicle. In IOP Conference Series: Materials Science and Engineering, Proceedings of the International Conference on Advances in Materials and Manufacturing Applications (IConAMMA-2017), Bengaluru, India, 17–19 August 2017; IOP Publishing: Bristol, UK, 2018; Volume 310, p. 012127. [Google Scholar]
- Rahim, S.L.; Zulkifli, S.M.; Abu Bakar, M.H. Nonlinear Control of a Magneto-Rheological Fluid Electrohydraulic Positioning System. In Progress in Engineering Technology III; Springer: Berlin/Heidelberg, Germany, 2021; pp. 9–17. [Google Scholar]
- Kim, D.H.; Kim, J.W.; Choi, S.B. Design and Modeling of Energy Efficient Dual Clutch Transmission With Ball-Ramp Self-Energizing Mechanism. IEEE Trans. Veh. Technol. 2020, 69, 2525–2536. [Google Scholar] [CrossRef]
- Škugor, B.; Deur, J.; Ivanović, V. E-Clutch Torque Control Including Compensation of Thermal Expansion Effects. IEEE Trans. Veh. Technol. 2020, 69, 246–257. [Google Scholar] [CrossRef]
- Hua, D.; Liu, X.; Li, Z.; Fracz, P.; Hnydiuk-Stefan, A.; Li, Z. A Review on Structural Configurations of Magnetorheological Fluid Based Devices Reported in 2018-2020. Front. Mater. 2021, 8, 24. [Google Scholar] [CrossRef]
- Thakur, M.K.; Sarkar, C. Development and performance analysis of a Magnetorheological fluid Clutch. In Proceedings of the COMSOL Conference, Boston, MA, USA, 3–5 October 2018. [Google Scholar]
- Kielan, P.; Pilch, Z. Comparison of properties of electromagnetic clutches with ferromagnetic powder and magnetorheological fluid for low frequency control signals. In Proceedings of the 2016 13th Selected Issues of Electrical Engineering and Electronics (WZEE), Rzeszow, Poland, 4–8 May 2016; pp. 1–6. [Google Scholar]
- Fernández, M.A.; Chang, J.Y.J. A study of factors affecting torque transmission in permanent magnet-based magnetorheological fluid clutch. Smart Mater. Struct. 2021, 30, 065024. [Google Scholar] [CrossRef]
- Zhang, H.; Du, H.; Sun, S.; Li, W.; Wang, Y. Design and Analysis of a Novel Magnetorheological Fluid Dual Clutch for Electric Vehicle Transmission; Technical report, SAE Technical Paper; Tohoku University: Miyagi, Japan, 2019. [Google Scholar]
- Zhou, H.; Zhao, W.; Zhang, H.; Wang, Y.; Wu, X.; Sun, Z. Magnetorheological seal: A review. Int. J. Appl. Electromagn. Mech. 2020, 62, 763–786. [Google Scholar] [CrossRef]
- Jung, S.; Choi, S.B.; Kim, J.; Ko, Y.; Lee, H. Adaptive Feed-Forward Control of the Clutch Filling Phase for Wet Dual Clutch Transmission. IEEE Trans. Veh. Technol. 2020, 69, 9577–9588. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Y.; Cai, T. Clutch Control Strategy of Driving Mode Transition for P2 Hybrid Electric Vehicle. In IOP Conference Series: Materials Science and Engineering, Proceedings of the 2018 4th International Conference on Mechanical Engineering and Automation Science (ICMEAS 2018), Beijing, China, 12–14 October 2018; IOP Publishing: Bristol, UK, 2019; Volume 470, p. 012003. [Google Scholar]
- Wu, M. Sliding Mode Control of A Dry-Type Two-Speed Dual Clutch Transmission for An Electric Vehicle During Optimal Power Transmission Process in Torque Phase. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1968–1975. [Google Scholar]
- Guo, J.; Zhang, Y. Adaptive Starting Control Strategy for Hybrid Electric Vehicles Equipped with a Wet Dual-Clutch Transmission. Actuators 2023, 12, 123. [Google Scholar] [CrossRef]
- Wu, S.; Zhu, E.; Ren, H.; Liu, Z.; Li, J. Study on control strategy of clutch engagement based on fuzzy control during vehicle starting. In Proceedings of the 2009 WRI World Congress on Computer Science and Information Engineering, Los Angeles, CA, USA, 31 March–2 April 2009; Volume 5, pp. 82–86. [Google Scholar]
- Huang, J.; Chen, X.; Zhong, L. Analysis and testing of MR shear transmission driven by SMA spring. Adv. Mater. Sci. Eng. 2013, 2013, 307207. [Google Scholar] [CrossRef]
- Elzaghir, W.; Zhang, Y.; Natarajan, N.; Massey, F.; Mi, C.C. Model Reference Adaptive Control for Hybrid Electric Vehicle With Dual Clutch Transmission Configurations. IEEE Trans. Veh. Technol. 2018, 67, 991–999. [Google Scholar] [CrossRef]
- Yang, Y.; Li, L.; Chen, G. Static yield stress of ferrofluid-based magnetorheological fluids. Rheol. Acta 2009, 48, 457–466. [Google Scholar] [CrossRef]
- Han, W. Minimization principles for elliptic hemivariational inequalities. Nonlinear Anal. Real World Appl. 2020, 54, 103114. [Google Scholar] [CrossRef]
- Guo, C.w.; Chen, F.; Meng, Q.r.; Dong, Z.x. Yield shear stress model of magnetorheological fluids based on exponential distribution. J. Magn. Magn. Mater. 2014, 360, 174–177. [Google Scholar] [CrossRef]
- Utami, D.; Mazlan, S.A.; Imaduddin, F.; Nordin, N.A.; Bahiuddin, I.; Aziz, A.; Aishah, S.; Mohamad, N.; Choi, S.B. Material characterization of a magnetorheological fluid subjected to long-term operation in damper. Materials 2018, 11, 2195. [Google Scholar] [CrossRef] [PubMed]
- Gopinath, B.; Sathishkumar, G.; Karthik, P.; Charles, M.M.; Ashok, K.; Ibrahim, M.; Akheel, M.M. A systematic study of the impact of additives on structural and mechanical properties of magnetorheological fluids. Mater. Today Proc. 2021, 37, 1721–1728. [Google Scholar] [CrossRef]
- Kowol, P.; Szczygieł, M.; Lo Sciuto, G.; Capizzi, G. Modeling of Magnetorheological Fluids Relative Magnetic Permeability by using a Neural Network approach. In Proceedings of the 2020 IEEE 20th Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020; pp. 25–28. [Google Scholar]
- Asiaban, R.; Khajehsaeid, H.; Ghobadi, E.; Jabbari, M. New magneto-rheological fluids with high stability: Experimental study and constitutive modelling. Polym. Test. 2020, 87, 106512. [Google Scholar] [CrossRef]
- Kumar, J.S.; Paul, P.S.; Raghunathan, G.; Alex, D.G. A review of challenges and solutions in the preparation and use of magnetorheological fluids. Int. J. Mech. Mater. Eng. 2019, 14, 13. [Google Scholar] [CrossRef]
- Pal, M. Numerical Analysis for Scientists and Engineers: Theory and C Programs, Alpha Science; Alpha Science: Oxford, UK, 2007. [Google Scholar]
- Gupta, M.; Jin, L.; Homma, N. Static and Dynamic Neural Networks: From Fundamentals to Advanced Theory; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coupling Size of DATAFLEX | Electrical Data |
|---|---|
| Rated torque TKN (Nm) | −20…+20 Nm |
| Band width of torque signal (kHz)(−3 dB) | 16 |
| Output voltage torque (V) | Torque output 0…10 |
| Output current torque (mA) | Torque output 4…20 |
| Influence of Temperature (%/10K) | 0.5 |
| Nominal temperature range (°C) | 0–55 |
| Supply voltage (V)DC | 24 ± 4 |
| Max current consumption (mA) | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lo Sciuto, G.; Kowol, P.; Capizzi, G. Modeling and Experimental Characterization of a Clutch Control Strategy Using a Magnetorheological Fluid. Fluids 2023, 8, 145. https://doi.org/10.3390/fluids8050145
Lo Sciuto G, Kowol P, Capizzi G. Modeling and Experimental Characterization of a Clutch Control Strategy Using a Magnetorheological Fluid. Fluids. 2023; 8(5):145. https://doi.org/10.3390/fluids8050145
Chicago/Turabian StyleLo Sciuto, Grazia, Paweł Kowol, and Giacomo Capizzi. 2023. "Modeling and Experimental Characterization of a Clutch Control Strategy Using a Magnetorheological Fluid" Fluids 8, no. 5: 145. https://doi.org/10.3390/fluids8050145
APA StyleLo Sciuto, G., Kowol, P., & Capizzi, G. (2023). Modeling and Experimental Characterization of a Clutch Control Strategy Using a Magnetorheological Fluid. Fluids, 8(5), 145. https://doi.org/10.3390/fluids8050145