
A Distance Measurement Approach for Large Fruit Picking with Single Camera


Abstract
:1. Introduction
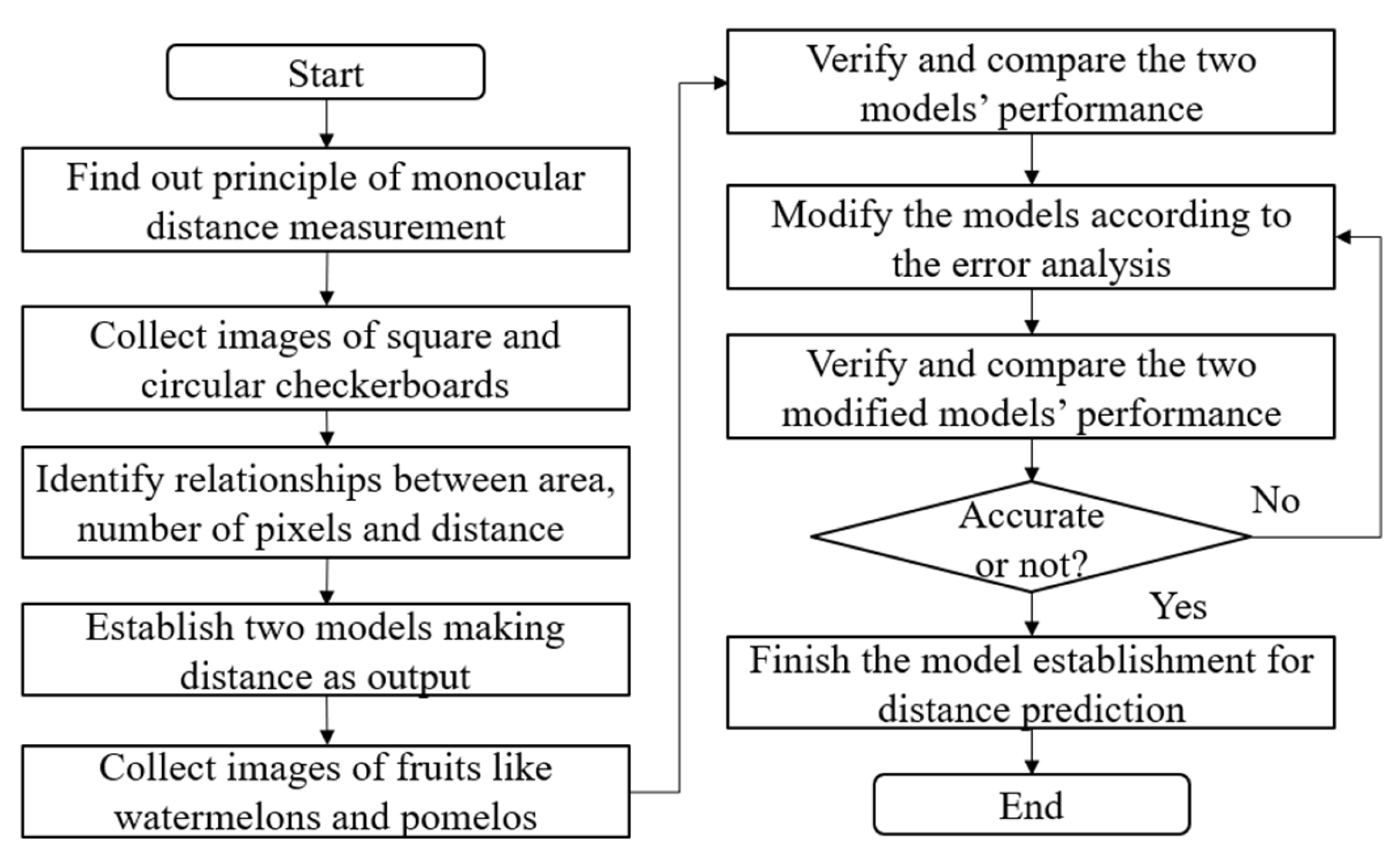
2. Materials and Methods
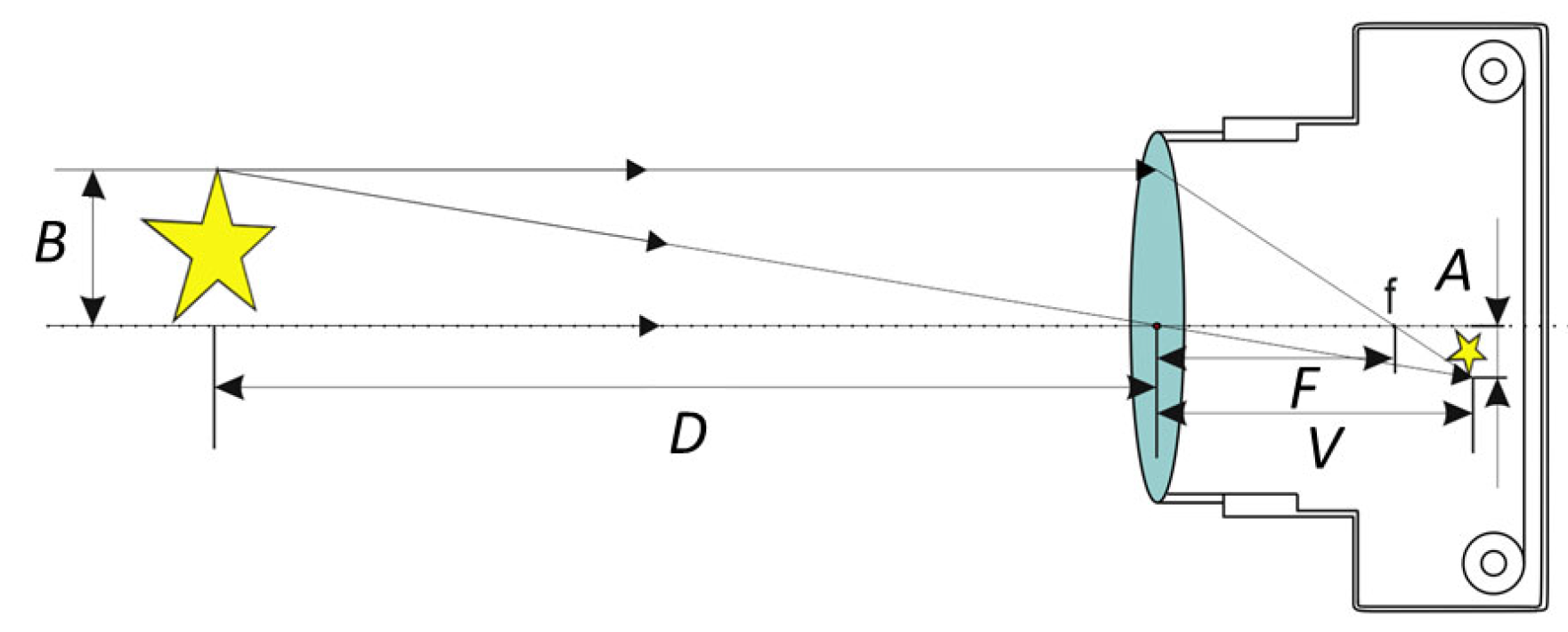
2.1. Principle of Monocular Distance Measurement

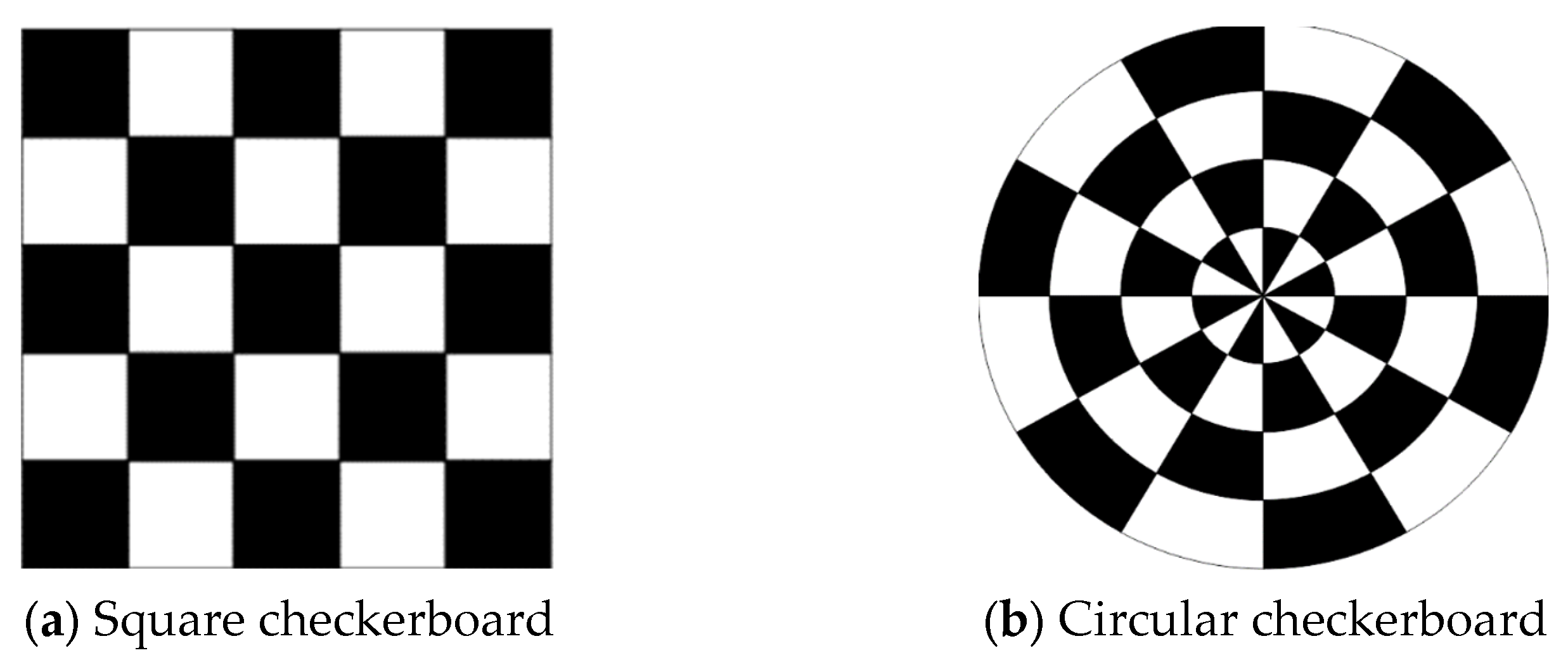
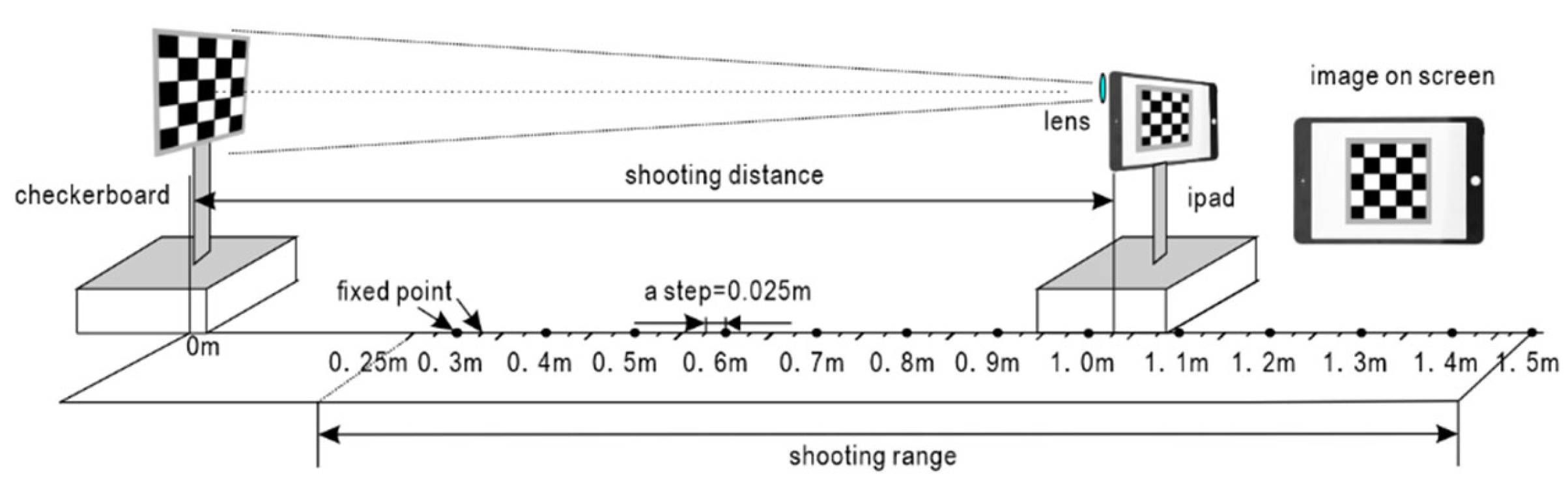
2.2. Model Establishment
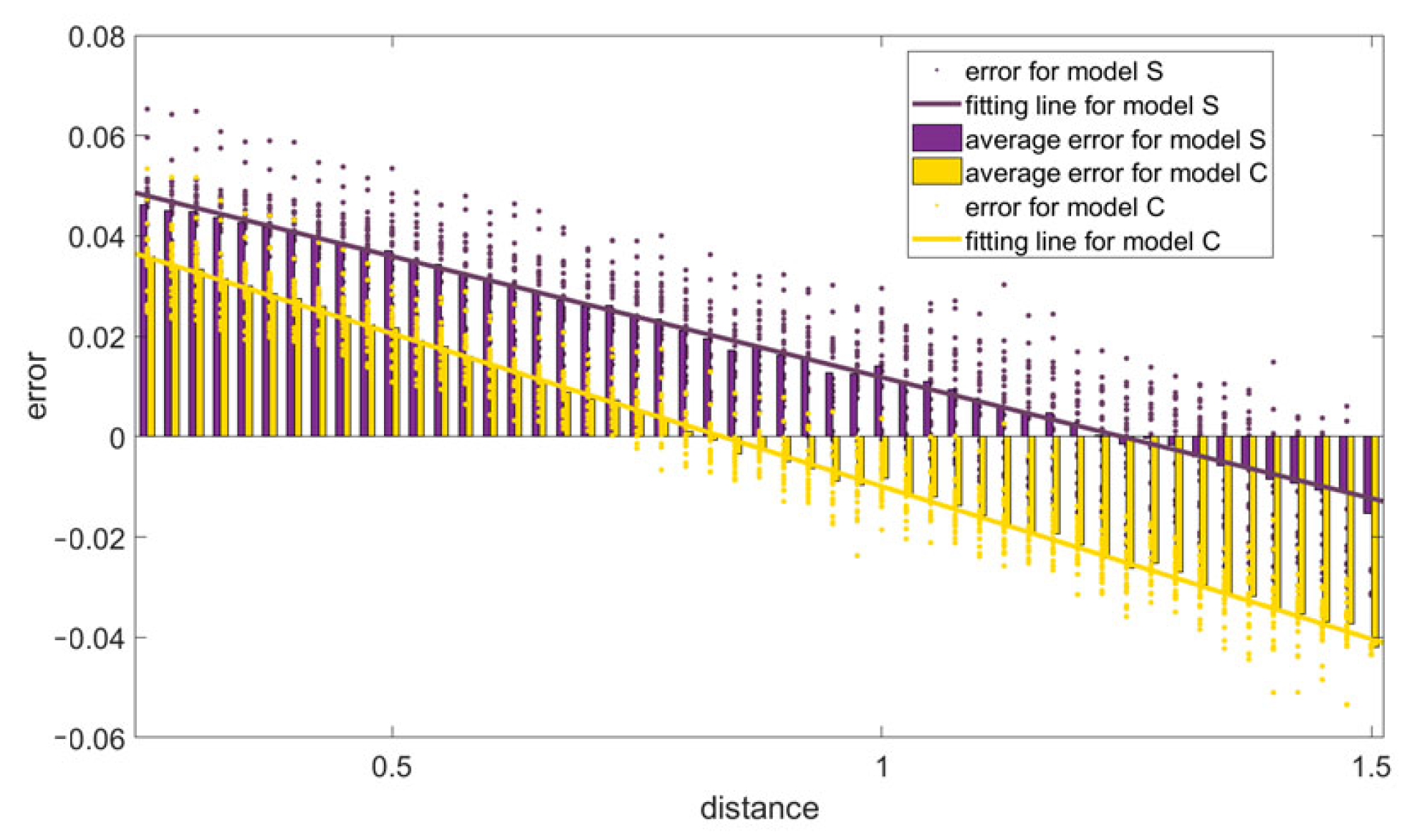
2.3. Model Error Modification
3. Results and Discussion
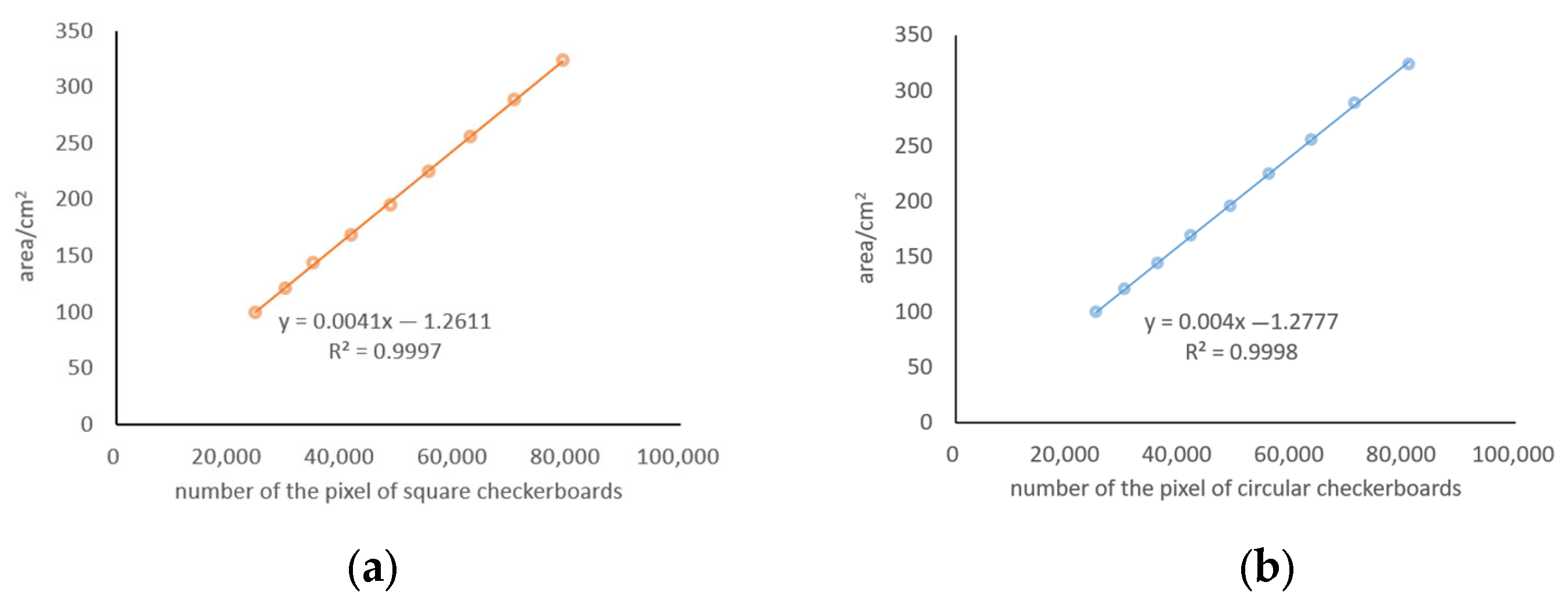
3.1. Establishment of Models

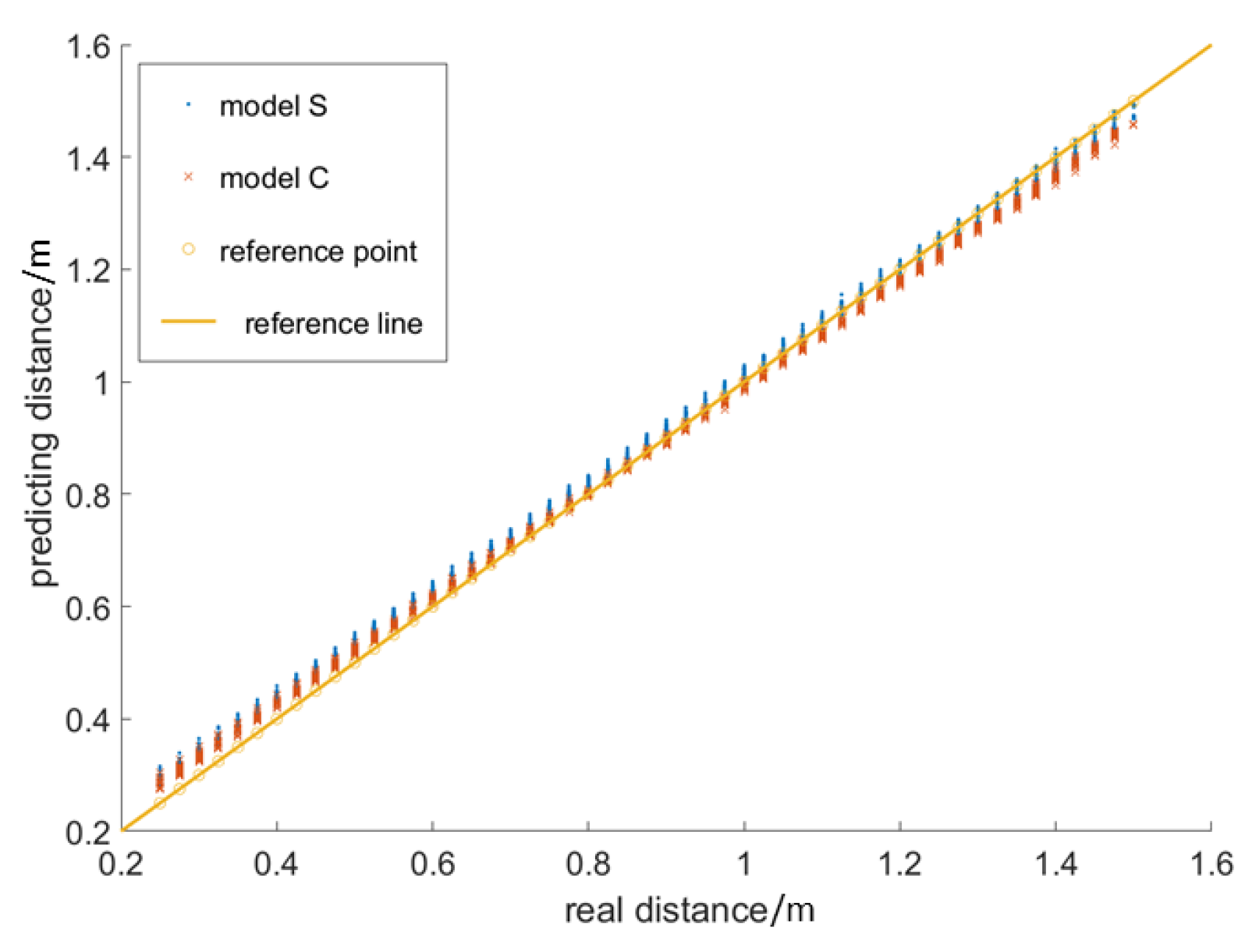
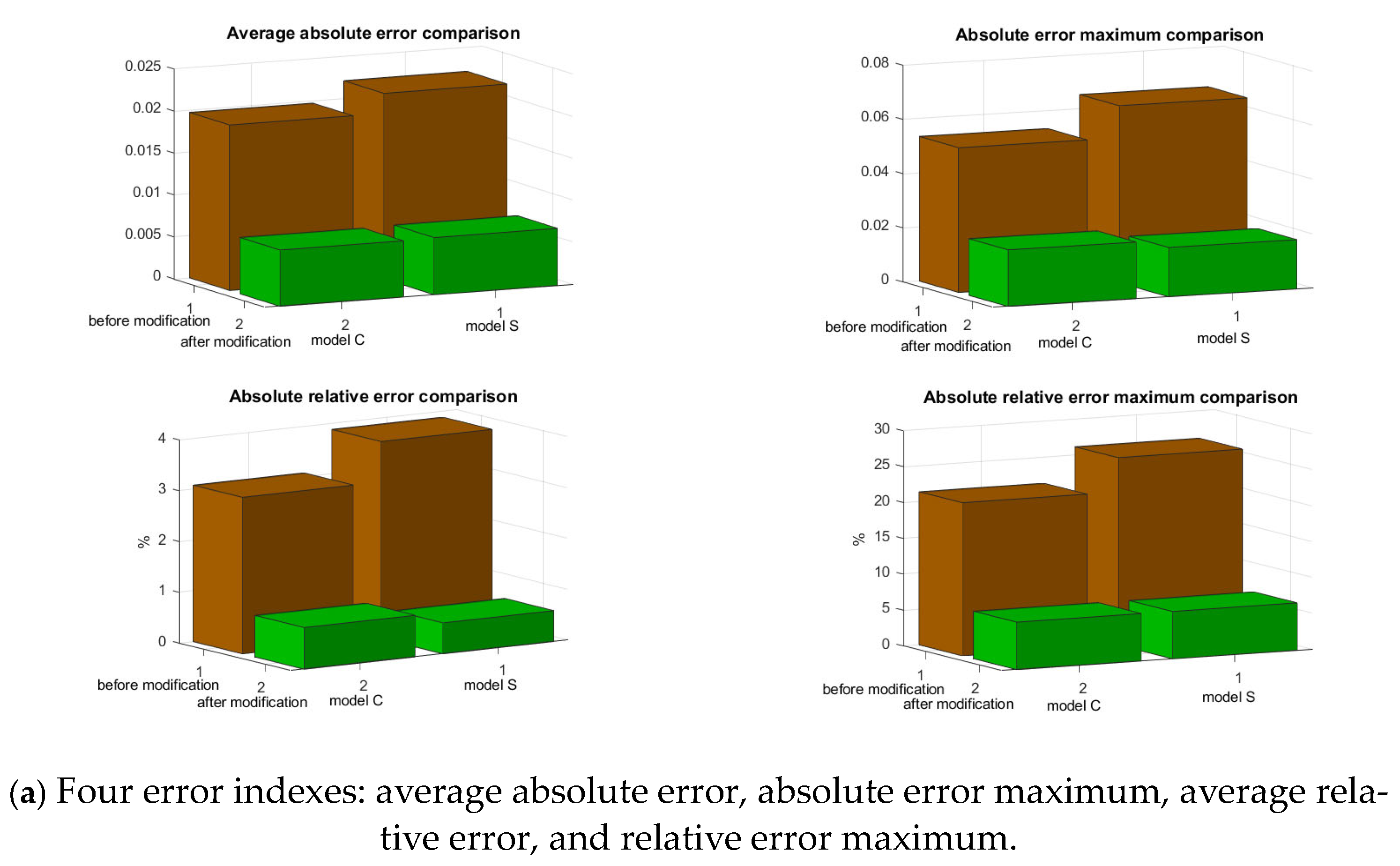
3.2. Model Modification

4. Conclusions
- (1)
- The regression model based on a square-shaped checkerboard could be presented as Equation (7), while a circular-shaped checkerboard could be presented as Equation (8).
- (2)
- According to the error analysis, two models were modified to Equations (11) and (12).
- (3)
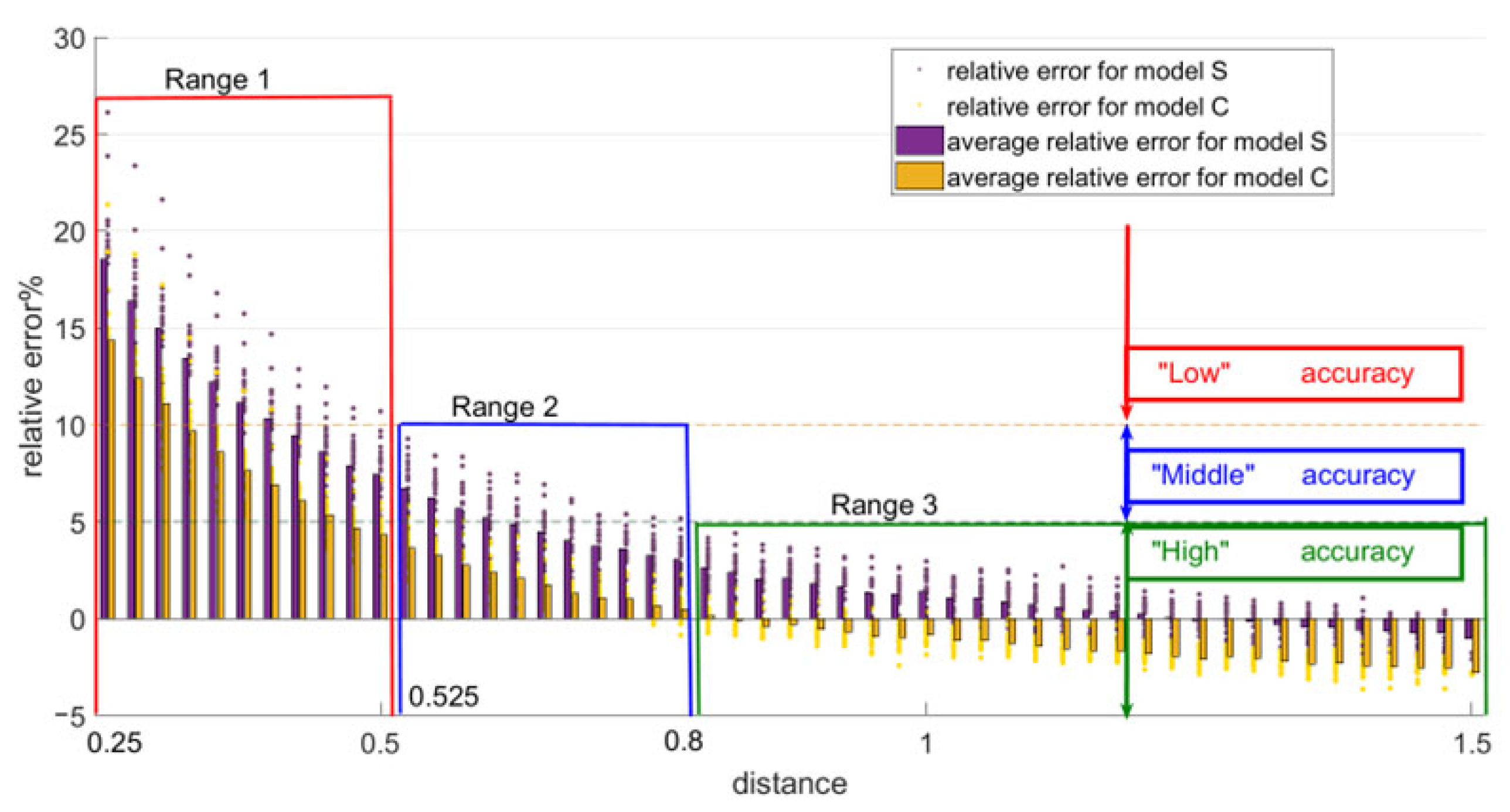
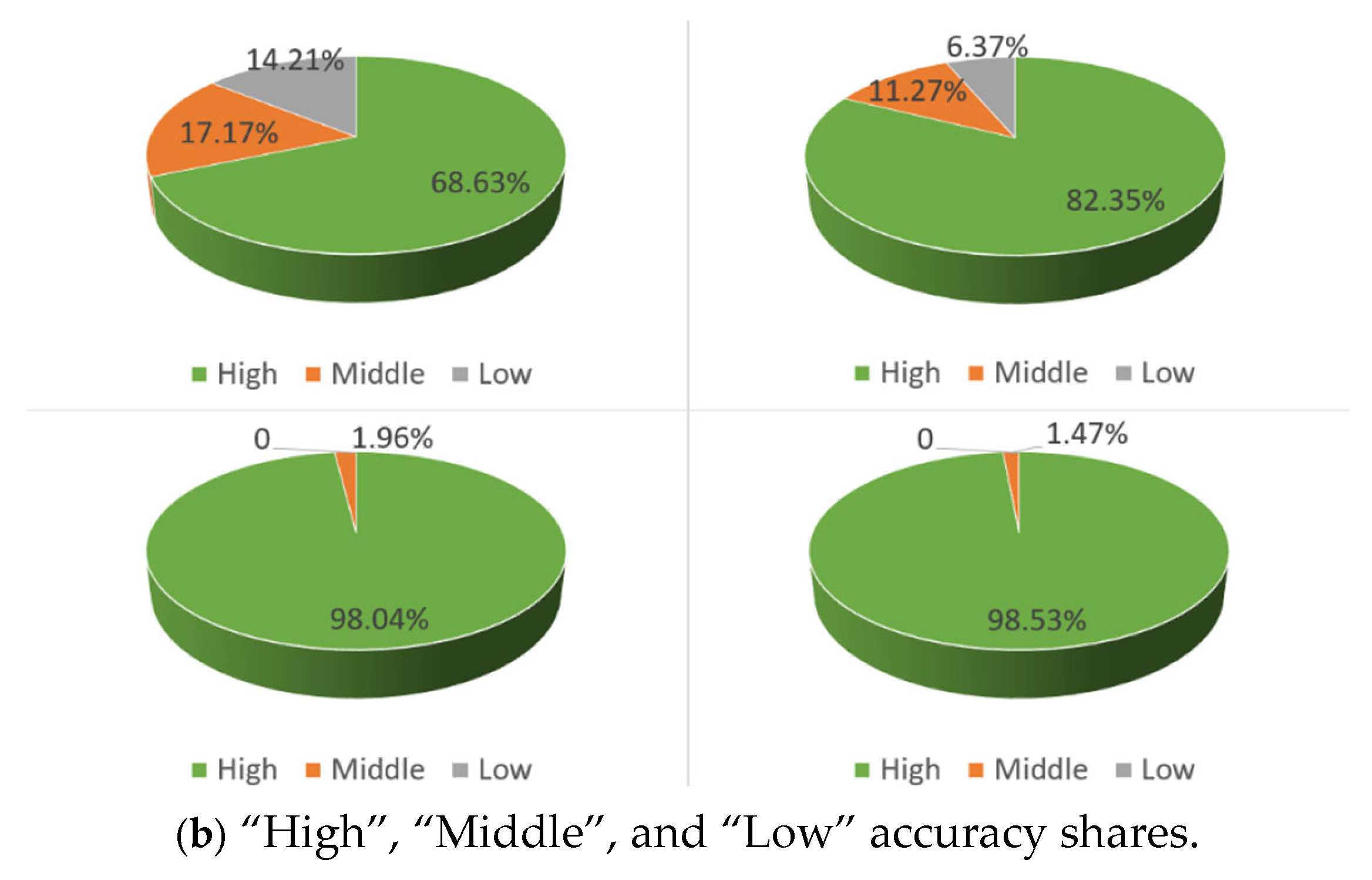
- Two models had over 98% “high” accuracy and no “low” accuracy. By comparison, the model of a circular checkerboard would be more predictively accurate than the one of a square checkerboard when they were used for large fruits.
- (4)
- Two models showed a sound-predicting effect with a 0.8~1.5 m distance where the camera was far away shooting an object when applied to the watermelon and pomelo fruit, due to the relative error being controlled within 2%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kang, D.; Chen, Z.J.; Fan, Y.H.; Li, C.; Mi, C.; Tang, Y.H. Optimization on kinematic characteristics and lightweight of a camellia fruit picking machine based on the kriging surrogate model. Mech. Ind. 2021, 22, 16. [Google Scholar] [CrossRef]
- Cao, X.; Yan, H.; Huang, Z.; Ai, S.; Xu, Y.; Fu, R.; Zou, X. A multi-objective particle swarm optimization for trajectory planning of fruit picking manipulator. Agronomy 2021, 11, 2286. [Google Scholar] [CrossRef]
- Pan, S.; Ahamed, T. Pear Recognition in an Orchard from 3D stereo camera datasets to develop a fruit picking mechanism using mask R-CNN. Sensors 2022, 22, 4187. [Google Scholar] [CrossRef] [PubMed]
- Rehman, A.; Saba, T.; Kashif, M.; Fati, S.M.; Bahaj, S.A.; Chaudhry, H. A revisit of Internet of Things technologies for monitoring and control strategies in smart agriculture. Agronomy 2022, 12, 127. [Google Scholar] [CrossRef]
- Kang, H.W.; Chen, C. Fruit Detection and Segmentation for Apple Harvesting Using Visual Sensor in Orchards. Sensors 2019, 19, 4599. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Chen, Z.; Wang, Y.; Bao, R.; Chen, X.; Fu, S.; Tian, M.; Zhang, Y. Research on flexible end-effectors with humanoid grasp function for small spherical fruit picking. Agriculture 2023, 13, 123. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, W. A “global-local” visual servo system for picking manipulators. Sensors 2020, 20, 3366. [Google Scholar] [CrossRef] [PubMed]
- Han, Y.; Routray, A.; Adeghate, J.O.; MacLachlan, R.A.; Martel, J.N.; Riviere, C.N. Monocular vision-based retinal membrane peeling with a handheld robot. ASME J. Med. Devices 2021, 15, 031014. [Google Scholar] [CrossRef] [PubMed]
- Fonder, M.; Ernst, D.; Van Droogenbroeck, M. M4depth: A motion-based approach for monocular depth estimation on video sequences. arXiv 2021, arXiv:2105.09847. [Google Scholar] [CrossRef]
- Tao, Y.; Zhou, J. Automatic apple recognition based on the fusion of color and 3D feature for robotic fruit picking. Comput. Electron. Agric. 2017, 142, 388–396. [Google Scholar] [CrossRef]
- Xiong, J.; Lin, R. The recognition of litchi clusters and the calculation of picking point in a nocturnal natural environment. Biosyst. Eng. 2018, 166, 44–57. [Google Scholar] [CrossRef]
- Wang, C.; Li, Z. Weed recognition using SVM model with fusion height and monocular image features. Trans. Chin. Soc. Agric. Eng. 2016, 32, 165–174. [Google Scholar]
- Liu, X.; Chen, S.W. Monocular camera based fruit counting and mapping with semantic data association. IEEE Robot. Autom. Lett. 2019, 4, 2296–2303. [Google Scholar] [CrossRef]
- Roberts, L. Machine Perception of Three-Dimensional Solids. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1963. [Google Scholar]
- Yamaguti, N.; Oe, S. A method of distance measurement by using monocular camera. In Proceedings of the 36th SICE Annual Conference, International Session Papers, Tokushima, Japan, 29–31 July 1997; pp. 1255–1260. [Google Scholar]
- Kim, H.; Lin, C.S. Distance measurement using a single camera with a rotating mirror. Int. J. Control. Autom. 2005, 3, 542–551. [Google Scholar]
- Alizadeh, P.; Zeinali, M. A real-time object distance measurement using a monocular camera. In Proceedings of the Iasted International Conference on Modelling Simulation & Optimatization, Banff, AB, Canada, 1 January 2013; pp. 237–242. [Google Scholar]
- Xiao, D.; Zhai, J. Target distance measurement method with monocular vision for wheeled mobile robot. Comput. Eng. 2017, 43, 287–291. [Google Scholar]
- Huang, L.; Chen, Y. Measurement the absolute distance of a front vehicle from an in-car camera based on monocular vision and instance segmentation. J. Electron. Imaging 2018, 27, 043019.1–043019.10. [Google Scholar] [CrossRef]
- Bazrafkan, S.; Javidnia, H. Semiparallel deep neural network hybrid architecture: First application on depth from monocular camera. J. Electron. Imaging 2018, 27, 19. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, B. Recognition and distance estimation of an irregular object in package sorting line based on monocular vision. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419827215. [Google Scholar] [CrossRef]
- Bianco, S.; Buzzelli, M. A unifying representation for pixel-precise distance estimation. Multimed. Tools Appl. 2019, 78, 13767–13786. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
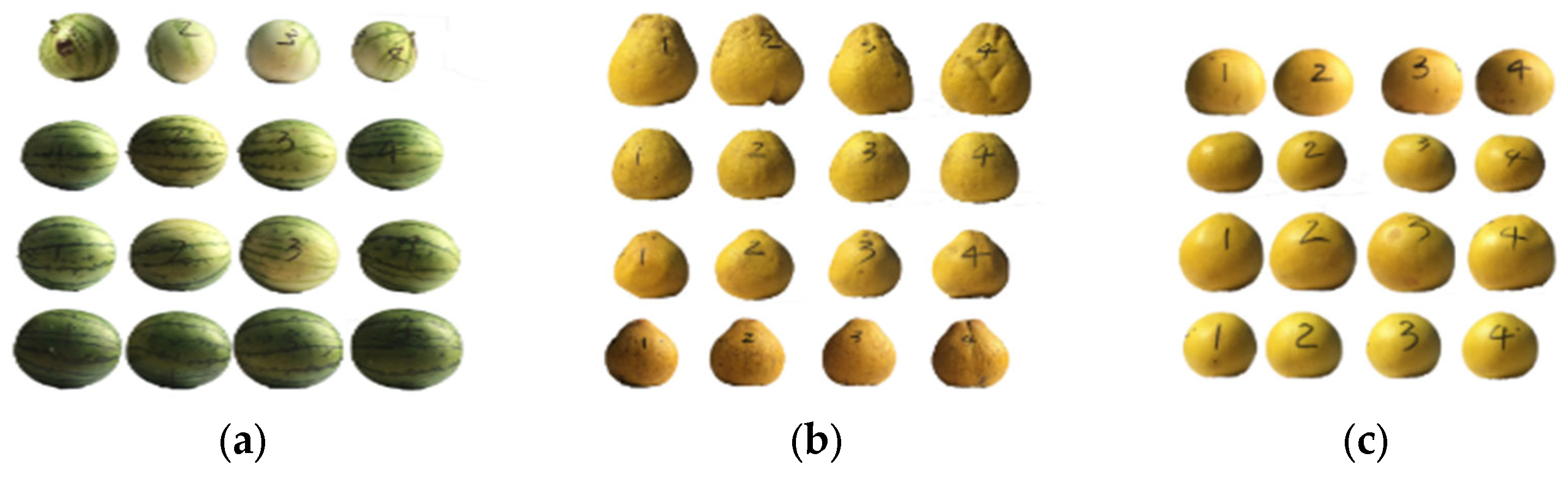
| Fruit | Shape | Sample Number | Maximum Projected Area/cm2 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1st Side | 2nd Side | 3rd Side | 4th Side | |||||||
| Square | Circular | Square | Circular | Square | Circular | Square | Circular | |||
| Watermelon | Oval | 1 | 110.72 | 107.97 | 100.10 | 97.61 | 105.47 | 102.85 | 98.09 | 95.65 |
| Watermelon | Oval | 2 | 145.98 | 142.37 | 153.09 | 149.31 | 150.29 | 146.58 | 150.17 | 146.46 |
| Watermelon | Oval | 3 | 176.27 | 171.93 | 166.29 | 162.18 | 178.96 | 174.55 | 168.04 | 163.89 |
| Watermelon | Oval | 4 | 206.83 | 201.74 | 201.52 | 196.56 | 209.09 | 203.94 | 204.83 | 199.79 |
| Pomelo | Pyriform | 1 | 172.54 | 168.29 | 178.82 | 174.41 | 169.55 | 165.37 | 176.97 | 172.61 |
| Pomelo | Pyriform | 2 | 124.06 | 120.99 | 125.84 | 122.73 | 124.74 | 121.65 | 126.37 | 123.24 |
| Pomelo | Pyriform | 3 | 101.30 | 98.78 | 103.65 | 101.07 | 102.74 | 100.19 | 102.98 | 100.42 |
| Pomelo | Pyriform | 4 | 128.40 | 125.22 | 128.75 | 125.56 | 124.32 | 121.23 | 125.19 | 125.19 |
| Pomelo | Oblate | 1 | 79.19 | 77.21 | 76.35 | 74.44 | 77.72 | 75.78 | 76.22 | 74.31 |
| Pomelo | Oblate | 2 | 137.68 | 134.28 | 129.98 | 126.76 | 136.33 | 132.96 | 129.16 | 125.96 |
| Pomelo | Oblate | 3 | 133.42 | 130.12 | 139.58 | 136.13 | 136.81 | 133.42 | 139.71 | 136.26 |
| Pomelo | Oblate | 4 | 125.22 | 123.48 | 125.56 | 123.79 | 121.23 | 118.95 | 125.19 | 122.68 |
| Distance (d)/m | Number of Pixels (x) | Distance (d)/m | Number of Pixels (x) | ||
|---|---|---|---|---|---|
| Square Checkerboard | Circular Checkerboard | Square Checkerboard | Circular Checkerboard | ||
| 0.250 | 2,125,400 | 2,027,978 | 0.900 | 157,169 | 152,677 |
| 0.275 | 1,810,936 | 1,662,104 | 0.925 | 145,664 | 144,729 |
| 0.300 | 1,458,858 | 1,386,520 | 0.950 | 137,918 | 138,808 |
| 0.325 | 1,277,878 | 1,199,561 | 0.975 | 133,377 | 131,268 |
| 0.350 | 1,044,969 | 1,018,685 | 1.000 | 125,000 | 124,805 |
| 0.375 | 941,468 | 888,487 | 1.025 | 118,917 | 119,939 |
| 0.400 | 799,591 | 776,853 | 1.050 | 112,923 | 112,443 |
| 0.425 | 721,767 | 688,263 | 1.075 | 108,788 | 108,577 |
| 0.450 | 628,723 | 619,131 | 1.100 | 102,864 | 104,056 |
| 0.475 | 575,948 | 555,015 | 1.125 | 97,706 | 99,427 |
| 0.500 | 502,876 | 500,698 | 1.150 | 93,544 | 95,202 |
| 0.525 | 471,042 | 454,438 | 1.175 | 90,278 | 90,870 |
| 0.550 | 413,690 | 414,606 | 1.200 | 86,200 | 86,456 |
| 0.575 | 385,746 | 377,284 | 1.225 | 83,074 | 84,213 |
| 0.600 | 346,711 | 347,165 | 1.250 | 79,721 | 76,901 |
| 0.625 | 325,720 | 322,823 | 1.275 | 77,675 | 74,469 |
| 0.650 | 294,896 | 297,677 | 1.300 | 73,686 | 73,686 |
| 0.675 | 275,735 | 274,991 | 1.325 | 71,471 | 71,481 |
| 0.700 | 254,463 | 253,468 | 1.350 | 68,586 | 69,220 |
| 0.725 | 239,976 | 235,587 | 1.375 | 65,719 | 66,114 |
| 0.750 | 221,816 | 221,410 | 1.400 | 62,926 | 64,467 |
| 0.775 | 209,194 | 206,859 | 1.425 | 61,690 | 61,875 |
| 0.800 | 193,000 | 194,518 | 1.450 | 58,614 | 59,503 |
| 0.825 | 183,087 | 183,071 | 1.475 | 56,673 | 57,292 |
| 0.850 | 170,805 | 172,736 | 1.500 | 55,230 | 55,939 |
| 0.875 | 163,039 | 164,536 | |||
| d/m | Model S | Model C | d/m | Model S | Model C | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| dps/m | eas/m | ers/% | dpc/m | eac/m | erc/% | dps/m | eas/m | ers/% | dpc/m | eac/m | erc/% | ||
| 0.250 | 0.287 | 0.0375 | 14.994 | 0.276 | 0.0262 | 10.497 | 0.900 | 0.912 | 0.012 | 1.289 | 0.887 | 0.013 | 1.435 |
| 0.275 | 0.314 | 0.039 | 14.214 | 0.302 | 0.027 | 9.853 | 0.925 | 0.944 | 0.019 | 2.013 | 0.919 | 0.006 | 0.694 |
| 0.300 | 0.338 | 0.038 | 12.525 | 0.325 | 0.025 | 8.315 | 0.950 | 0.967 | 0.017 | 1.834 | 0.942 | 0.008 | 0.840 |
| 0.325 | 0.361 | 0.036 | 11.156 | 0.348 | 0.023 | 7.076 | 0.975 | 0.989 | 0.014 | 1.436 | 0.963 | 0.012 | 1.205 |
| 0.350 | 0.383 | 0.033 | 9.481 | 0.369 | 0.019 | 5.531 | 1.000 | 1.015 | 0.015 | 1.471 | 0.989 | 0.011 | 1.142 |
| 0.375 | 0.411 | 0.036 | 9.569 | 0.396 | 0.021 | 5.696 | 1.025 | 1.041 | 0.016 | 1.574 | 1.015 | 0.010 | 1.015 |
| 0.400 | 0.435 | 0.035 | 8.742 | 0.420 | 0.020 | 4.964 | 1.050 | 1.063 | 0.013 | 1.277 | 1.037 | 0.013 | 1.281 |
| 0.425 | 0.461 | 0.036 | 8.371 | 0.445 | 0.020 | 4.671 | 1.075 | 1.089 | 0.014 | 1.284 | 1.062 | 0.013 | 1.249 |
| 0.450 | 0.483 | 0.033 | 7.408 | 0.467 | 0.017 | 3.796 | 1.100 | 1.112 | 0.012 | 1.073 | 1.084 | 0.016 | 1.432 |
| 0.475 | 0.506 | 0.031 | 6.445 | 0.489 | 0.014 | 2.916 | 1.125 | 1.140 | 0.015 | 1.348 | 1.112 | 0.013 | 1.136 |
| 0.500 | 0.528 | 0.028 | 5.626 | 0.511 | 0.011 | 2.172 | 1.150 | 1.159 | 0.009 | 0.816 | 1.131 | 0.019 | 1.638 |
| 0.525 | 0.553 | 0.028 | 5.326 | 0.535 | 0.010 | 1.933 | 1.175 | 1.183 | 0.008 | 0.695 | 1.155 | 0.020 | 1.734 |
| 0.550 | 0.578 | 0.028 | 5.048 | 0.559 | 0.009 | 1.713 | 1.200 | 1.213 | 0.013 | 1.077 | 1.184 | 0.016 | 1.334 |
| 0.575 | 0.600 | 0.025 | 4.390 | 0.581 | 0.006 | 1.119 | 1.225 | 1.234 | 0.009 | 0.742 | 1.205 | 0.020 | 1.642 |
| 0.600 | 0.624 | 0.024 | 3.937 | 0.604 | 0.004 | 0.722 | 1.200 | 1.256 | 0.006 | 0.515 | 1.227 | 0.023 | 1.845 |
| 0.625 | 0.648 | 0.023 | 3.679 | 0.628 | 0.003 | 0.514 | 1.275 | 1.284 | 0.009 | 0.685 | 1.254 | 0.021 | 1.656 |
| 0.650 | 0.673 | 0.023 | 3.601 | 0.653 | 0.003 | 0.481 | 1.300 | 1.308 | 0.008 | 0.616 | 1.278 | 0.022 | 1.703 |
| 0.675 | 0.698 | 0.023 | 3.445 | 0.677 | 0.002 | 0.370 | 1.325 | 1.329 | 0.004 | 0.290 | 1.298 | 0.027 | 2.005 |
| 0.700 | 0.722 | 0.022 | 3.196 | 0.701 | 0.001 | 0.165 | 1.350 | 1.351 | 0.001 | 0.107 | 1.321 | 0.029 | 2.165 |
| 0.725 | 0.749 | 0.024 | 3.247 | 0.727 | 0.002 | 0.253 | 1.375 | 1.378 | 0.003 | 0.195 | 1.347 | 0.028 | 2.059 |
| 0.750 | 0.770 | 0.020 | 2.633 | 0.748 | 0.002 | 0.312 | 1.400 | 1.415 | 0.015 | 1.061 | 1.383 | 0.017 | 1.183 |
| 0.775 | 0.791 | 0.016 | 2.041 | 0.768 | 0.007 | 0.858 | 1.425 | 1.423 | 0.002 | 0.166 | 1.391 | 0.034 | 2.378 |
| 0.800 | 0.817 | 0.017 | 2.119 | 0.794 | 0.006 | 0.747 | 1.450 | 1.444 | 0.006 | 0.417 | 1.412 | 0.038 | 2.607 |
| 0.825 | 0.841 | 0.016 | 1.983 | 0.818 | 0.007 | 0.847 | 1.475 | 1.471 | 0.004 | 0.272 | 1.439 | 0.036 | 2.445 |
| 0.850 | 0.865 | 0.015 | 1.798 | 0.842 | 0.008 | 0.997 | 1.500 | 1.490 | 0.010 | 0.640 | 1.458 | 0.042 | 2.790 |
| 0.875 | 0.891 | 0.016 | 1.835 | 0.867 | 0.008 | 0.929 | |||||||
| Fruit | Model S | Model C | ||||||
|---|---|---|---|---|---|---|---|---|
| Average Absolute Error/m | Absolute Error Maximum/m | Average Relative Error/% | Relative Error Maximum/% | Average Absolute Error/m | Absolute Error Maximum/m | Average Relative Error/% | Relative Error Maximum/% | |
| W1 | 0.024 | 0.065 | 4.370 | 26.110 | 0.020 | 0.053 | 3.216 | 21.355 |
| W2 | 0.022 | 0.048 | 4.167 | 19.081 | 0.020 | 0.048 | 3.022 | 14.337 |
| OP1 | 0.017 | 0.037 | 2.080 | 14.557 | 0.018 | 0.043 | 2.574 | 11.614 |
| OP2 | 0.020 | 0.051 | 3.282 | 20.276 | 0.019 | 0.042 | 3.117 | 16.997 |
| PP1 | 0.027 | 0.060 | 4.991 | 23.855 | 0.020 | 0.047 | 3.380 | 18.930 |
| PP2 | 0.023 | 0.051 | 4.360 | 20.483 | 0.020 | 0.042 | 3.171 | 15.778 |
| RH | 68.63% | 82.35% | ||||||
| RM | 17.17% | 11.27% | ||||||
| RL | 14.21% | 6.37% | ||||||
| Fruit | Model S | Model C | ||||||
|---|---|---|---|---|---|---|---|---|
| Average Absolute Error | Absolute Error Maximum | Average Relative Error% | Relative Error Maximum% | Average Absolute Error | Absolute Error Maximum | Average Relative Error% | Relative Error Maximum% | |
| W3 | 0.009 | 0.018 | 0.929 | 4.519 | 0.005 | 0.013 | 0.809 | 4.625 |
| W4 | 0.012 | 0.020 | 1.183 | 6.609 | 0.007 | 0.018 | 0.811 | 6.622 |
| OP3 | 0.003 | 0.011 | 0.276 | 4.239 | 0.003 | 0.012 | 0.818 | 3.772 |
| OP4 | 0.007 | 0.024 | 0.681 | 2.591 | 0.003 | 0.012 | 0.821 | 2.399 |
| PP3 | 0.004 | 0.015 | 0.387 | 3.767 | 0.003 | 0.012 | 0.826 | 3.425 |
| PP4 | 0.006 | 0.018 | 0.610 | 4.166 | 0.007 | 0.021 | 0.830 | 3.850 |
| RH | 98.04% | 98.53% | ||||||
| RM | 1.96% | 1.47% | ||||||
| RL | 0 | 0 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Zhou, D.; Wang, Y.; Li, Y.; Li, W. A Distance Measurement Approach for Large Fruit Picking with Single Camera. Horticulturae 2023, 9, 537. https://doi.org/10.3390/horticulturae9050537
Liu J, Zhou D, Wang Y, Li Y, Li W. A Distance Measurement Approach for Large Fruit Picking with Single Camera. Horticulturae. 2023; 9(5):537. https://doi.org/10.3390/horticulturae9050537
Chicago/Turabian StyleLiu, Jie, Dianzhuo Zhou, Yifan Wang, Yan Li, and Weiqi Li. 2023. "A Distance Measurement Approach for Large Fruit Picking with Single Camera" Horticulturae 9, no. 5: 537. https://doi.org/10.3390/horticulturae9050537
APA StyleLiu, J., Zhou, D., Wang, Y., Li, Y., & Li, W. (2023). A Distance Measurement Approach for Large Fruit Picking with Single Camera. Horticulturae, 9(5), 537. https://doi.org/10.3390/horticulturae9050537