Estimation Accuracy and Computational Cost Analysis of Artificial Neural Networks for State of Charge Estimation in Lithium Batteries






Abstract
:1. Introduction
2. Artificial Neural Network Design
2.1. ANN Proposed Architectures
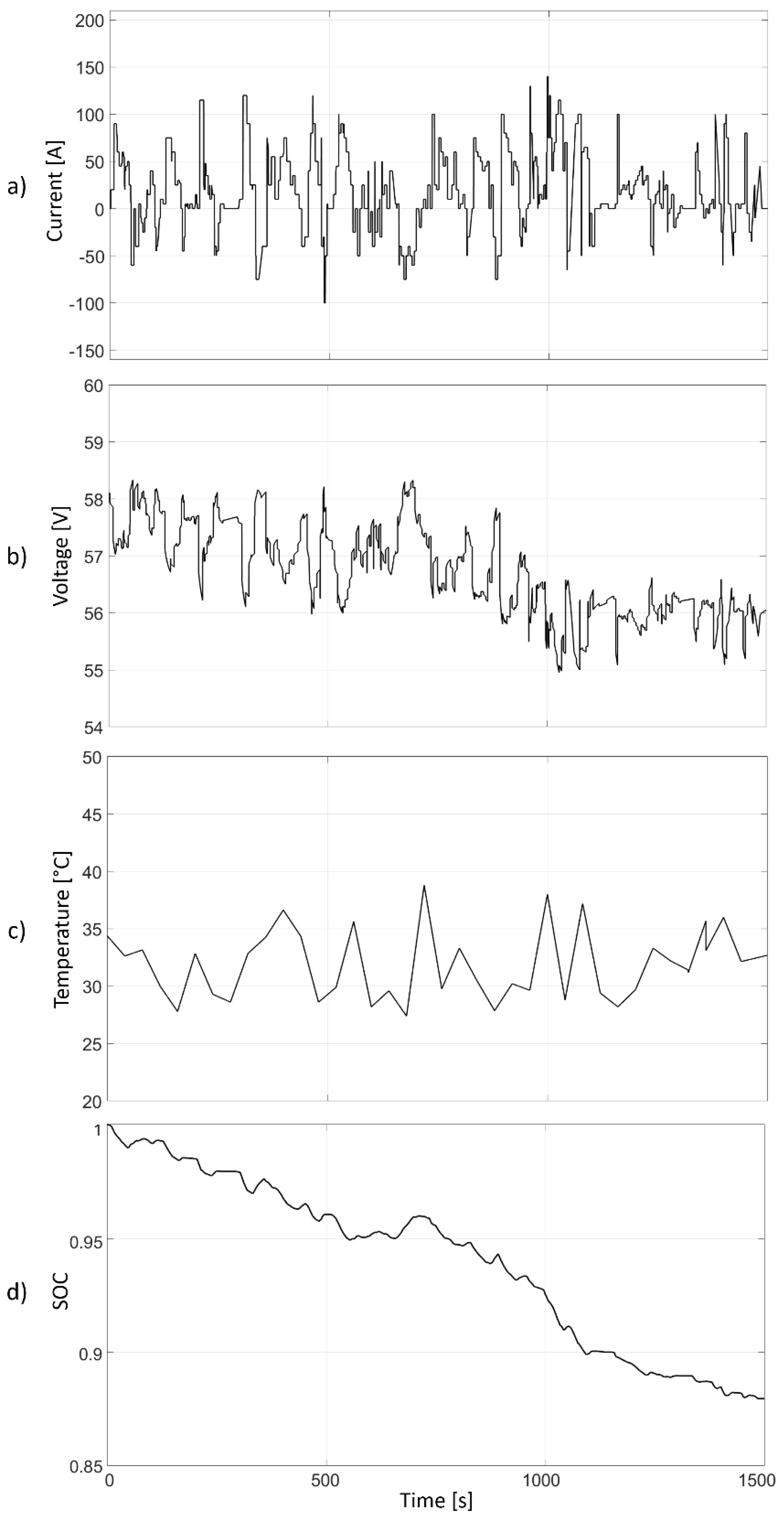
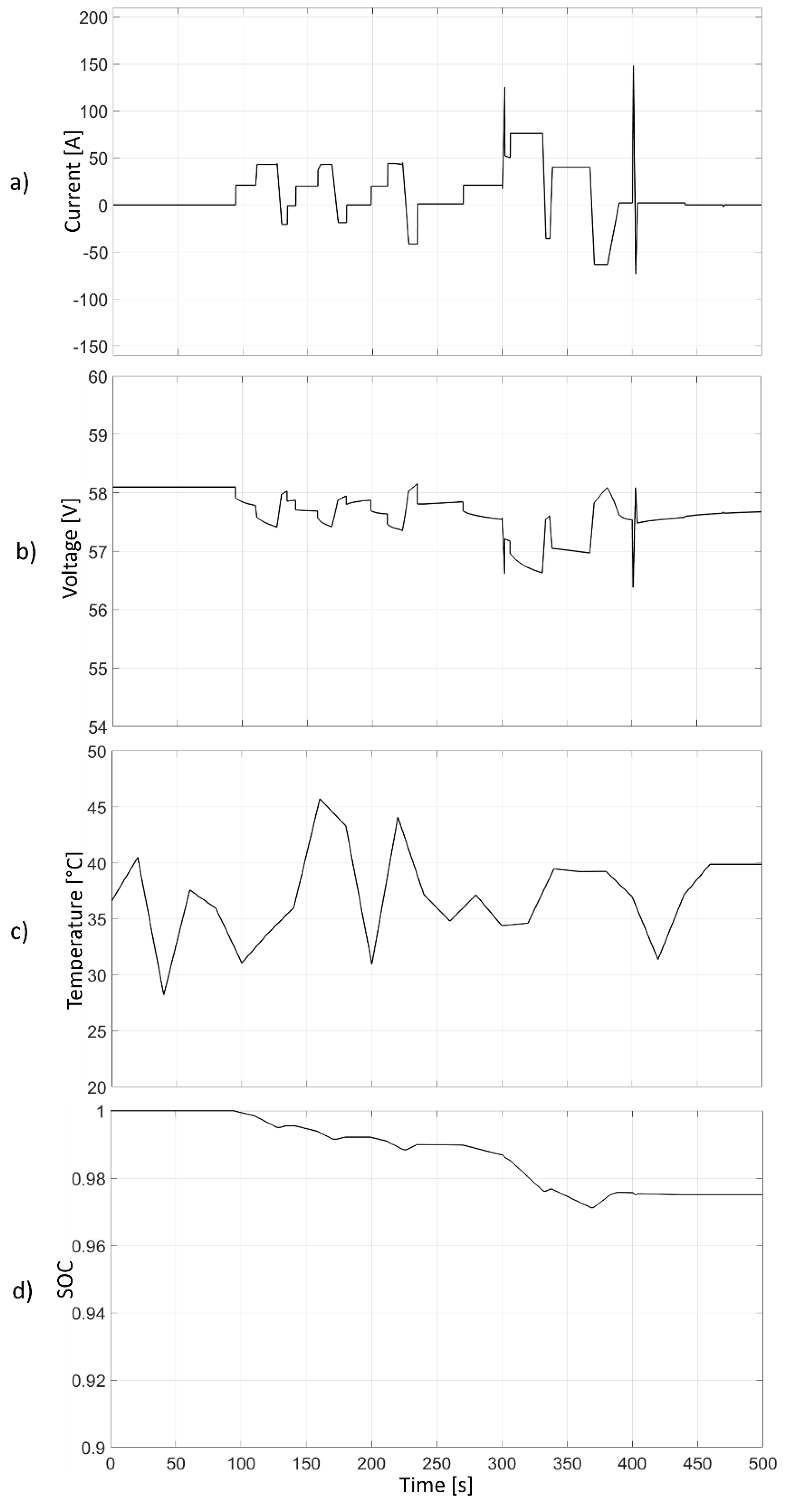
2.2. Training and Test Datasets
3. Results and Discussion
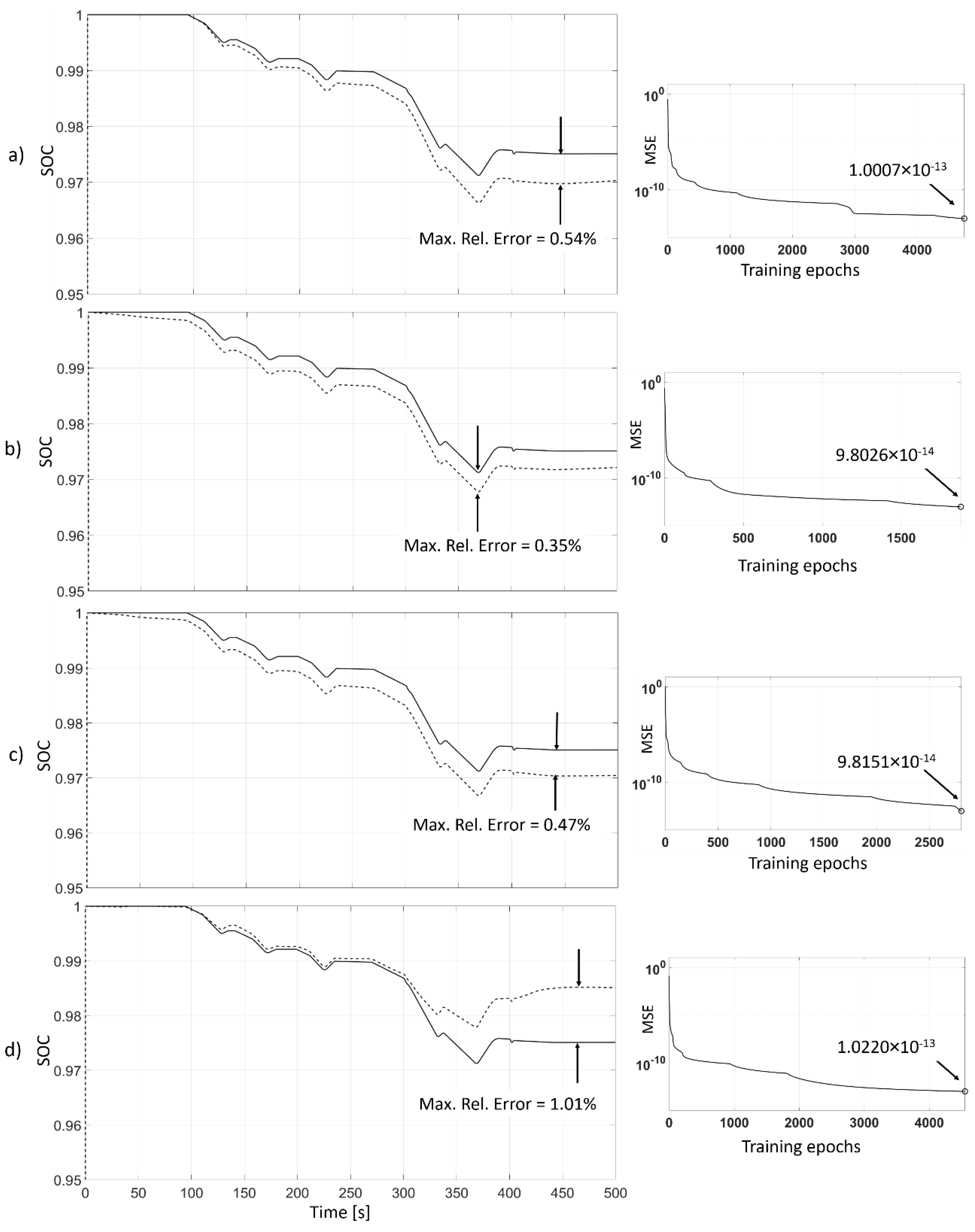
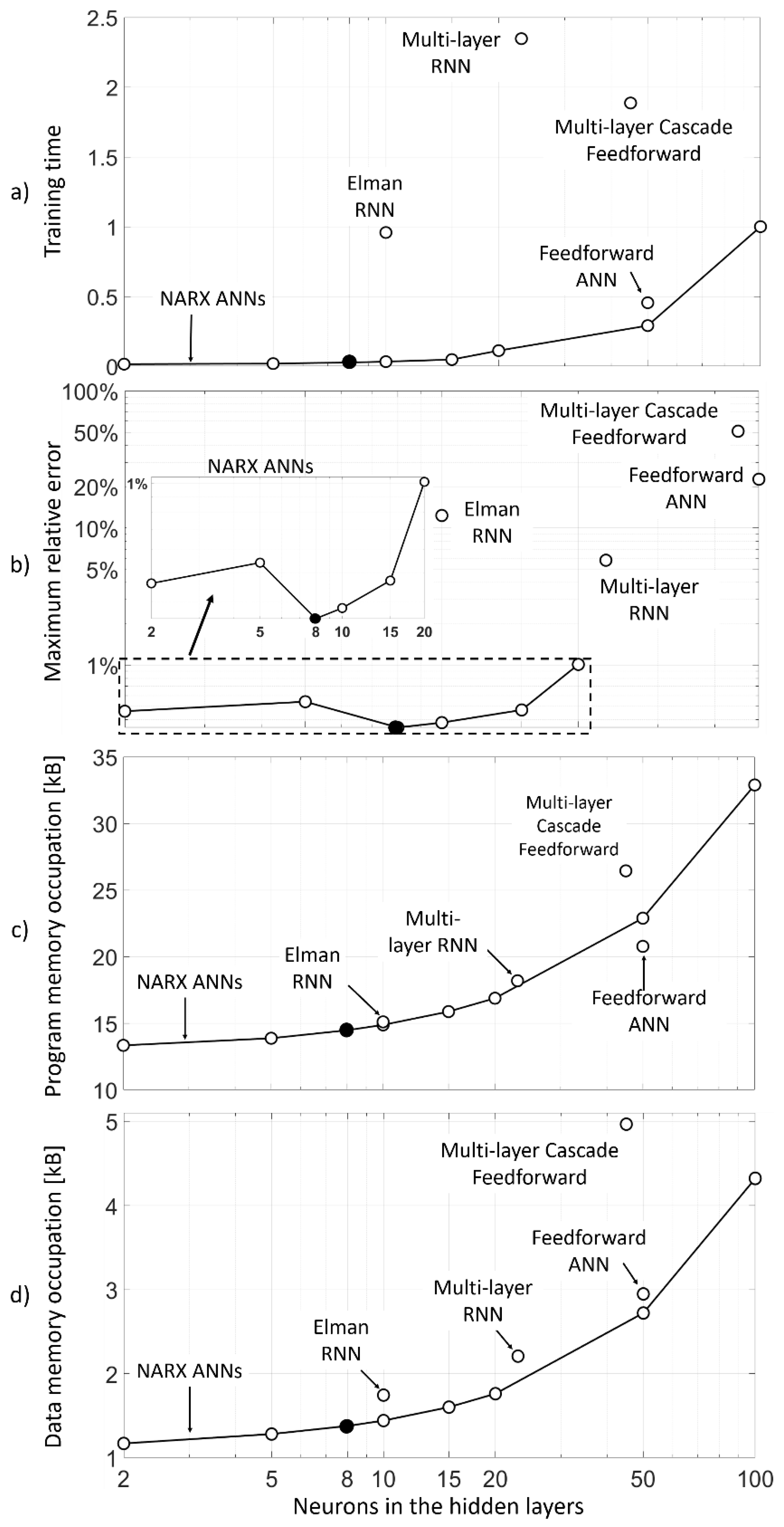
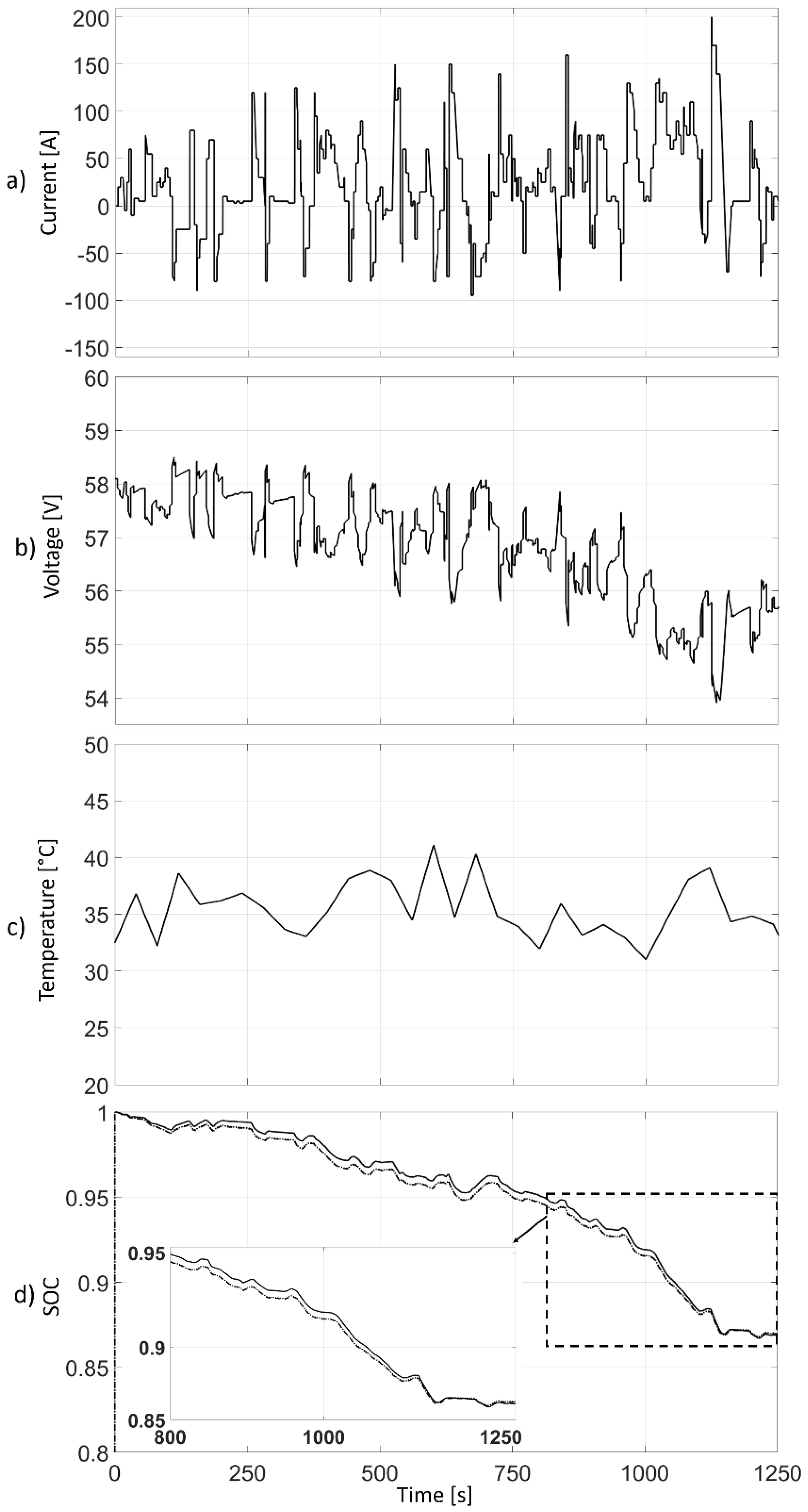
3.1. Performance and Computational Cost Analysis
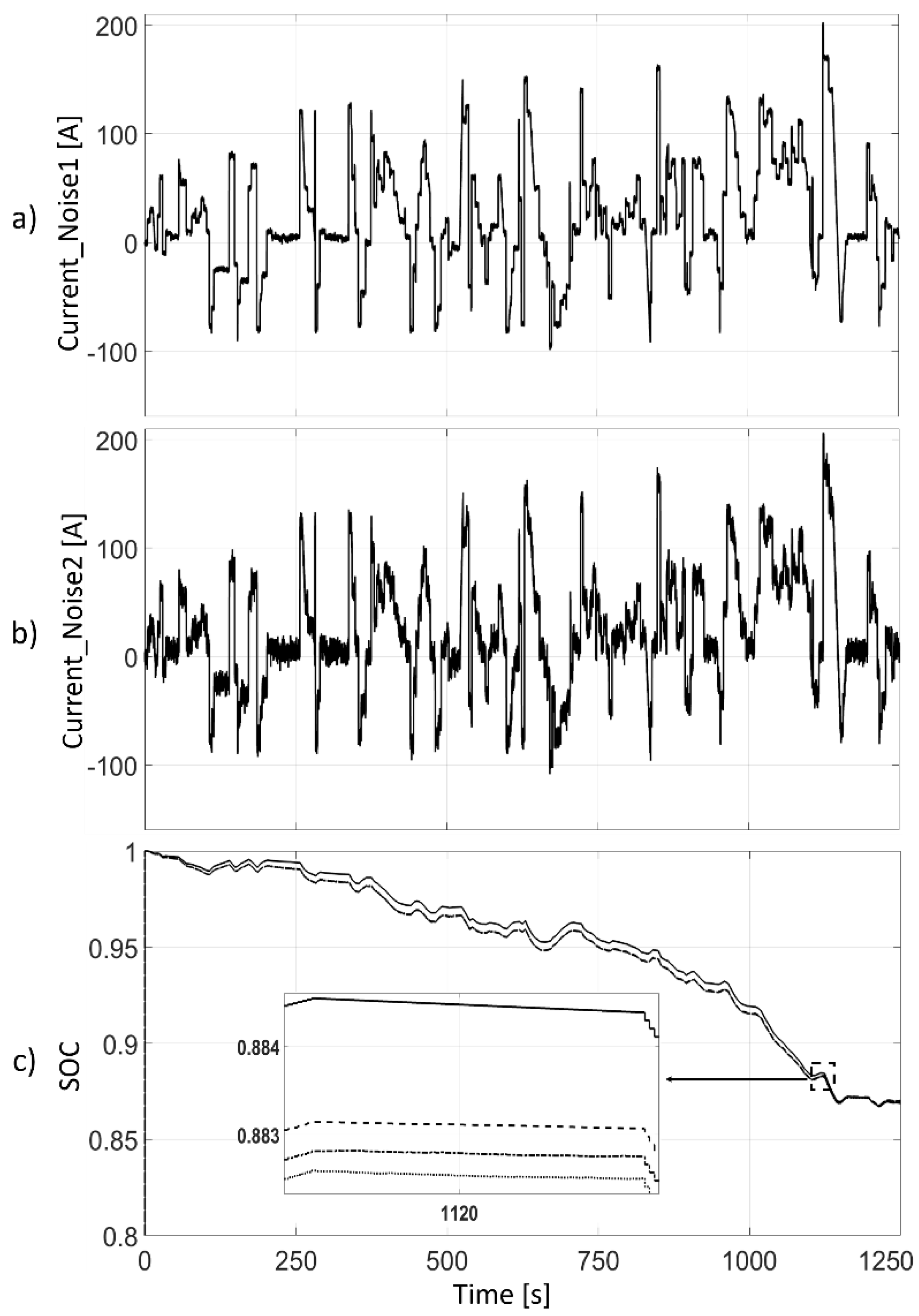
3.2. Robustness Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bishop, J.D.K.; Martin, N.P.D.; Boies, A.M. Cost-effectiveness of alternative powertrains for reduced energy use and CO2 emissions in passenger vehicles. Appl. Energy 2014, 124, 44–61. [Google Scholar] [CrossRef]
- Walther, G.; Wansart, J.; Kieckhafer, K.; Schneider, E.; Spengler, T.S. Impact assessment in the automotive industry: Mandatory market introduction of alternative powertrain technologies. Syst. Dyn. Rev. 2010, 26, 239–261. [Google Scholar] [CrossRef]
- Ahman, M. Assessing the future competitiveness of alternative powertrains. Int. J. Veh. 2003, 33, 309. [Google Scholar] [CrossRef]
- Chan, C.C.; Chau, K.T. Modern Electric Vehicle Technology; Oxford University Press: New York, NY, USA, 2002. [Google Scholar]
- Anderman, M. Status and Trends in the HEV/PHEC/EV Battery Industry; Rocky Mountain Institute: Snowmass, CO, USA, 2008. [Google Scholar]
- Chen, X.; Shen, W.; Vo, T.T.; Cao, Z.; Kapor, A. An overview of lithium-ion batteries for electric vehicles. In Proceedings of the IEEE IPEC Conference on Power and Energy, Ho Chi Minh City, Vietnam, 12–14 December 2012. [Google Scholar]
- Leksono, E.; Haq, I.N.; Iqbal, M.; Soelami, F.N.; Merthayasa, I. State of Charge (SoC) Estimation on LiFePO4 Battery Module Using Coulomb Counting Methods with Modified Peukert. In Proceedings of the IEEE 2013 Joint International Conference on Rural Information & Communication Technology and Electric-Vehicle Technology, Bandung, Indonesia, 26–28 November 2013. [Google Scholar]
- Chang, W.Y. The State of Charge Estimating Methods for Battery: A Review. Appl. Math. 2013, 2013. [Google Scholar] [CrossRef]
- Rivera-Barrera, J.P.; Muñoz-Galeano, N.; Sarmiento-Maldonado, H.O. SoC Estimation for Lithium-ion Batteries: Review and Future Challenges. Electronics 2017, 6, 102. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; Ji, D.; Tseng, K.T. A multi-timescale estimator for battery state of charge and capacity dual estimation based on an online identified model. Appl. Energy 2017, 204, 1264–1274. [Google Scholar] [CrossRef]
- Charkhgard, M.; Farrokhi, M. State-of-Charge Estimation for Lithium-Ion Batteries Using Neural Networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Jiang, C.; Taylor, A.; Duan, C.; Bai, K. Extended Kalman Filter based battery state of charge (SOC) estimation for electric vehicles. In Proceedings of the IEEE Transportation Electrification Conference and EXPO (ITEC), Detroit, MI, USA, 16–19 June 2013. [Google Scholar]
- Pérez, G.; Garmendia, M.; Reynaud, J.F.; Crego, J.; Viscarret, U. Enhanced closed loop State of Charge estimator for lithium-ion batteries based on Extended Kalman Filter. Appl. Energy 2015, 155, 834–845. [Google Scholar] [CrossRef]
- Wang, S.; Fernandez, C.; Shang, L.; Li, Z.; Li, J. Online state of charge estimation for the aerial lithium-ion battery packs based on the improved extended Kalman filter method. J. Energy Storage 2017, 9, 69–83. [Google Scholar] [CrossRef]
- He, Z.; Chen, D.; Pan, C.; Chen, L.; Wang, S. State of charge estimation of power Li-ion batteries using a hybrid estimation algorithm based on UKF. Electrochim. Acta 2016, 211, 101–109. [Google Scholar]
- Yu, Q.; Xiong, R.; Lin, C. Online estimation of state-of-charge based on H infinity and unscented Kalman filters for lithium ion batteries. Energy Procedia 2017, 105, 2791–2796. [Google Scholar] [CrossRef]
- Ye, M.; Guo, H.; Xiong, R.; Yang, R. Model-based state-of-charge estimation approach of the Lithium-ion battery using an improved adaptive particle filter. Energy Procedia 2016, 103, 394–399. [Google Scholar] [CrossRef]
- Kim, T.; Wang, Y.; Sahinoglu, Z.; Wada, T.; Hara, S.; Qiao, W. State of Charge Estimation Based on a Realtime Battery Model and Iterative Smooth Variable Structure Filter. In Proceedings of the IEEE Innovative Smart Grid Technologies—Asia, Kuala Lumpur, Malaysia, 20–23 May 2014. [Google Scholar]
- Zou, Z.; Xu, J.; Mi, C.; Cao, B.; Chen, Z. Evaluation of Model Based State of Charge Estimation Methods for Lithium-Ion Batteries. Energies 2014, 7, 5065–5082. [Google Scholar] [CrossRef] [Green Version]
- Du, J.; Liu, Z.; Wang, Y.; Wen, C. A Fuzzy Logic-based Model for Li-ion Battery with SOC and Temperature Effect. In Proceedings of the 11th IEEE Conference on Control & Automation (ICCA), Taichung, Taiwan, 18–20 June 2014. [Google Scholar]
- Li, H.; Wang, W.; Su, S.; Lee, Y. A Merged Fuzzy Neural Network and Its Applications in Battery State-of-Charge Estimation. IEEE Trans. Energy Convers. 2007, 22, 697–708. [Google Scholar] [CrossRef]
- Lin, F.J.; Huang, M.S.; Yeh, P.Y.; Tsai, H.C.; Kuan, C.H. DSP Based Probabilistic Fuzzy Neural Network Control for Li-Ion Battery Charger. IEEE Trans. Power Electron. 2012, 27, 3782–3794. [Google Scholar] [CrossRef]
- Cai, C.H.; Du, D.; Liu, Z.Y.; Zhang, Z. Artificial neural network in estimation of battery state of-charge (SOC) with nonconventional input variables selected by correlation analysis. In Proceedings of the International Conference on Machine Learning and Cybernetics, Beijing, China, 4–5 November 2002. [Google Scholar]
- Soylu, E.; Soylu, T.; Bayir, R. Design and Implementation of SOC Prediction for a Li-Ion Battery Pack in an Electric Car with an Embedded System. Entropy 2017, 19, 146. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for Li-ion batteries using neural network modeling and unscented Kalman filter-based error cancellation. Electr. Power Energy Syst. 2014, 62, 783–791. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, C.; Cui, N.; Zhang, X. Battery State-Of-Charge estimation in Electric Vehicle using Elman neural network method. In Proceedings of the IEEE 29th Chinese Control Conference (CCC), Beijing, China, 29–31 July 2010. [Google Scholar]
- Chaoui, H.; Ibe-Ekeocha, C.C. State of Charge and State of Health Estimation for Lithium Batteries Using Recurrent Neural Networks. IEEE Trans. Veh. Technol. 2017, 66, 8773–8783. [Google Scholar] [CrossRef]
- Fan, G.; Pan, K.; Canova, M. A Comparison of Model Order Reduction Techniques for Electrochemical Characterization of Lithium-ion Batteries. In Proceedings of the IEEE 54th Annual Conference on Decision and Control, Osaka, Japan, 15–18 December 2015. [Google Scholar]
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory, Numerical Analysis. In Lecture Notes in Mathematics; Watson, G.A., Ed.; Springer: Berlin/Heidelberg, Germany, 1978; Volume 630. [Google Scholar]
- Warsito, B.; Santoso, R.; Yasin, H. Cascade Forward Neural Network for Time Series Prediction. J. Phys. Conf. Ser. 2018, 1025, 012097. [Google Scholar] [CrossRef]
- Seker, S.; Ayaz, E.; Turkcan, E. Elman’s recurrent neural network applications to condition monitoring in nuclear power plant and rotating machinery. Eng. Appl. Artif. Intell. 2013, 16, 647–656. [Google Scholar] [CrossRef]
- Elman, J.L. Finding Structure in Time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Caterini, A. A Novel Mathematical Framework for the Analysis of Neural Networks; UWSpace: Waterloo, ON, Canada, 2017. [Google Scholar]
- Rezvanizanian, S.M.; Huang, Y.; Chuan, J.; Lee, J. A Mobility Performance Assessment on Plug-in EV Battery. Int. J. Progn. Health Manag. 2012, 3, 12. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Typical Capacity (@ 0.5C, 4.2 V ÷ 2.7 V, 25 °C) | 5 Ah | |
| Nominal Voltage | 3.7 V | |
| Cut-off voltage | 2.7 V | |
| Continuous current | 150 A | |
| Peak current | 250 A | |
| Cycle life (Charge/Discharge @ 1C) | >800 cycles | |
| Charge condition | Max. Current | 10 A |
| Voltage | 4.2V ± 0.03 V | |
| Operating Temperature | Charge | 0 °C–40 °C |
| Discharge | −20 °C–60 °C | |
| Mass | 128.0 ± 4 g | |
| Dimension | Thickness | 11.5 ± 0.2 mm |
| Width | 42.5 ± 0.5 mm | |
| Length | 142.0 ± 0.5 mm | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bonfitto, A.; Feraco, S.; Tonoli, A.; Amati, N.; Monti, F. Estimation Accuracy and Computational Cost Analysis of Artificial Neural Networks for State of Charge Estimation in Lithium Batteries. Batteries 2019, 5, 47. https://doi.org/10.3390/batteries5020047
Bonfitto A, Feraco S, Tonoli A, Amati N, Monti F. Estimation Accuracy and Computational Cost Analysis of Artificial Neural Networks for State of Charge Estimation in Lithium Batteries. Batteries. 2019; 5(2):47. https://doi.org/10.3390/batteries5020047
Chicago/Turabian StyleBonfitto, Angelo, Stefano Feraco, Andrea Tonoli, Nicola Amati, and Francesco Monti. 2019. "Estimation Accuracy and Computational Cost Analysis of Artificial Neural Networks for State of Charge Estimation in Lithium Batteries" Batteries 5, no. 2: 47. https://doi.org/10.3390/batteries5020047
APA StyleBonfitto, A., Feraco, S., Tonoli, A., Amati, N., & Monti, F. (2019). Estimation Accuracy and Computational Cost Analysis of Artificial Neural Networks for State of Charge Estimation in Lithium Batteries. Batteries, 5(2), 47. https://doi.org/10.3390/batteries5020047