Segmentation Effect on the Transferability of International Safety Performance Functions for Rural Roads in Egypt


 ,
,
Abstract
:1. Introduction
HSM Transferability Procedure
- (1)
- Choosing the suitable SPF according to the highway facility under specific base conditions,
- (2)
- Adjusting the base conditions using CMFs if the cross-section of the road deviates from the base condition, and
- (3)
- Finally, the calibration factor (Cr) is estimated to calibrate the predictive model to local conditions as follows:
2. Materials and Methods
2.1. Data Description
- (1)
- Sections with constant length, specifically, a length of one-kilometer (S1). This length was chosen as the crash data reported by GARBLT was available only for every kilometer;
- (2)
- Homogenous sections (S2): in this method, the highway length was divided into homogenous segments, as suggested by HSM [17] with respect to AADT and some geometric characteristics (e.g., number of lanes, median widths, shoulder width, etc.);
- (3)
- Segmentation based on curvature (S3): the highway was divided into two types of segments based on the presence of curves, as follows: (a) segments with curves, and (b) segments with no curves. It is worth mentioning that, as the crash data is reported every kilometer, the consecutive segments that contain curves are taken as one section and the consecutive one-kilometer sections with no curves are taken as one segment. This is done with respect to the AADT and other geometric characteristics; and
- (4)
- Segmentation based on curvature and U-turns (S4): the segments were categorized according to the presence of both curves and U-turns, as in S3. The consecutive segments with curves or U-turns were merged into one segment, and the consecutive sections without curves or U-turns were merged into one segment.
2.2. Investigated SPFs
2.3. Adjusting the Base Conditions
2.3.1. Default CMFs from the HSM
- (a)
- Lane width (LW): 12 ft. (3.65 m),
- (b)
- Right shoulder width: 8 ft. (2.44 m),
- (c)
- Median width: 30 ft. (9.14 m),
- (d)
- Lighting: None, and
- (e)
- Automated speed enforcement: None.
2.3.2. Locally Derived CMFs Values
2.3.3. Recalibrating the Constant Term and the Over-Dispersion Parameter of the Transferred SPF
2.4. Recalibrating the Over-Dispersion Parameter
2.4.1. Constant Over-Dispersion Parameter
2.4.2. Over-Dispersion Parameter as a Function of the Segment Length
2.5. Goodness-of-Fit (GOF) Measures
2.5.1. The Mean Absolute Deviation (MAD)
2.5.2. The Mean Prediction Bias (MPB)
2.5.3. The Mean Absolute Percentage Error (MAPE)
2.5.4. Pearson χ2 Statistic
2.5.5. Z-Score
3. Results
3.1. Default CMFs from HSM Versus Locally Derived CMFs
3.2. Locally Derived CMFs Versus Recalibrating the Constant of the Transferred Models
3.3. Fixed Over-Dispersion Parameter Versus Variable Over-Dispersion Parameter
4. Discussion and Conclusions
- The segmentation method was found to affect the performance of the transferred SPF model. The difference between the segmentation approaches and among the investigated international models is statistically significant at the 5% significance level.
- The total crashes calibration factors derived from both HSM default CMFs values and locally derived CMFs are lower than one, meaning that the HSM models are overestimating the crash occurrence on multilane rural divided roads in Egypt. Moreover, the calibrated HSM model using locally derived CMFs with the S2 segmentation method outperformed the calibrated HSM model using HSM default CMFs values;
- The calibrated Italian SPF using both locally derived CMFs and by recalibrating the constant outperformed all other investigated international SPFs, as they performed very well for all segmentation methods, especially, for the S1 segmentation method;
- The recalibration of the constant of the transferred models to allow it to better suit local conditions in Egypt is superior to the SPFs recalibration using the local CMFs;
- Using variable overdispersion parameter for the recalibrated SPFs outperforms the constant overdispersion parameter.
Study Limitations
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Asal, H.I.; Said, D. An Approach for Development of Local Safety Performance Functions for Multi-Lane Rural Divided Highways in Egypt. Transp. Res. Rec. 2019, 2673, 510–521. [Google Scholar] [CrossRef]
- Herman, J.; Ameratunga, S.; Jackson, R.T. Burden of road traffic injuries and related risk factors in low and middle-income Pacific Island countries and territories: A systematic review of the scientific literature (TRIP 5). BMC Public Health 2012, 12, 479. [Google Scholar] [CrossRef] [Green Version]
- Ismail, M.A.; Abdelmageed, S.M.M. Cost of road traffic accidents in Egypt. World Acad. Sci. Eng. Technol. 2010, 42, 1308–1314. [Google Scholar]
- Elagamy, S.R.; El-Badawy, S.M.; Shwaly, S.A.; Zidan, Z.M.; Shahdah, U. Segmentation effect on developing safety performance functions for rural arterial roads in Egypt. Innov. Infrastruct. Solut. 2020, 5, 1–12. [Google Scholar] [CrossRef]
- Park, J.; Abdel-Aty, M.; Lee, J.; Lee, C. Developing crash modification functions to assess safety effects of adding bike lanes for urban arterials with different roadway and socio-economic characteristics. Accid. Anal. Prev. 2015, 74, 179–191. [Google Scholar] [CrossRef]
- Saleem, T. Advancing the Methodology for Predicting the Safety Effects of Highway Design and Operational Elements. Ph.D. Thesis, Ryerson University, Toronto, ON, Canada, 2016. [Google Scholar]
- Glavić, D.; MladenoviĆ, M.N.; Stevanovic, A.; Tubić, V.; Milenković, M.; Vidas, M. Contribution to Accident Prediction Models Development for Rural Two-Lane Roads in Serbia. PROMET Traffic Transp. 2016, 28, 415–424. [Google Scholar] [CrossRef] [Green Version]
- Claros, B.; Sun, C.; Edara, P. Missouri-Specific Crash Prediction Model for Signalized Intersections. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 32–42. [Google Scholar] [CrossRef]
- Eenink, R.; Reurings, M.; Elvik, R.; Cardoso, J.; Wichert, S.; Stefan, C. Accident Prediction Models and Road Safety Impact Assessment: Recommendations for using these tools. RiPCORD iSEREST 2005, 506184, 1–20. [Google Scholar]
- Hauer, E.; Hakkert, A.S. Extent and some implications of incomplete accident reporting. Transp. Res. Rec. 1988, 1185, 1–10. [Google Scholar]
- Amoros, E.; Martin, J.-L.; Laumon, B. Under-reporting of road crash casualties in France. Accid. Anal. Prev. 2006, 38, 627–635. [Google Scholar] [CrossRef]
- Imprialou, M.-I.M.; Quddus, M. Crash data quality for road safety research: Current state and future directions. Accid. Anal. Prev. 2019, 130, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Jacobs, G.; Sayer, I. Road accidents in developing countries. Accid. Anal. Prev. 1983, 15, 337–353. [Google Scholar] [CrossRef] [Green Version]
- Sawalha, Z.; Sayed, T. Transferability of accident prediction models. Saf. Sci. 2006, 44, 209–219. [Google Scholar] [CrossRef]
- Peden, M.; Scurfield, R.; Sleet, D.; Mohan, D.; Hyder, A.A. World Report on Traffic Injury Prevention: A Graphical Overview of the Global Burden of Injuries; WHO: Geneva, Switzerland, 2004. [Google Scholar]
- Srinivasan, R.; Carter, D.; Bauer, K. Safety Performance Function Decision Guide: SPF Calibration versus SPF Development (No. FHWA-SA-14-004); Federal Highway Administration, Office of Safety: Washington, DC, USA, 2013.
- Highway Safety Manual; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2010.
- Sayed, T.; Leur, P. Collision Prediction Models for British Columbia; BC Ministry of Transportation & Infrastructure: Victoria, BC, Canada, 2008.
- Agostino, C.D. Investigating Transferability and Goodness of Fit of Two Different Approaches of Segmentation and Model form for estimating safety performance of Motorways. Procedia Eng. 2014, 84, 613–623. [Google Scholar] [CrossRef] [Green Version]
- Geni, B.B.; Hauer, E. User’s Guide to Develop Highway Safety Manual Safety Performance Function Calibration Factors; National Cooperative Highway Research Program: Washington, DC, USA, 2014. [Google Scholar]
- Mehta, G.; Lou, Y. Calibration and Development of Safety Performance Functions for Alabama. Transp. Res. Rec. J. Transp. Res. Board 2013, 2398, 75–82. [Google Scholar] [CrossRef]
- Saha, D.; Alluri, P.; Gan, A. A Bayesian procedure for evaluating the frequency of calibration factor updates in highway safety manual (HSM) applications. Accid. Anal. Prev. 2017, 98, 74–86. [Google Scholar] [CrossRef]
- Persaud, B.; Lord, D.; Palmisano, J. Calibration and Transferability of Accident Prediction Models for Urban Intersections. Transp. Res. Rec. J. Transp. Res. Board 2002, 1784, 57–64. [Google Scholar] [CrossRef] [Green Version]
- Cafiso, S.; Dágostino, C.; Persaud, B. Investigating the influence of segmentation in estimating safety performance functions for roadway sections. J. Traffic Transp. Eng. 2018, 5, 129–136. [Google Scholar] [CrossRef]
- Dissanayake, S.; Aziz, S.R. Calibration of the Highway Safety Manual and Development of New Safety Performance Functions for Rural Multilane Highways in Kansas (No. K-TRAN: KSU-14-3); Kansas Department of Transportation, Bureau of Research: Topeka, KS, USA, 2016. [Google Scholar]
- Sun, C.; Brown, H.; Edara, P.; Claros, B.; Nam, K. Calibration of the HSM’s SPFs for Missouri; Publication CMR14-007; Missouri Department of Transportation: Missouri, MO, USA, 2014.
- Young, J.; Park, P.Y. Benefits of small municipalities using jurisdiction-specific safety performance functions rather than the Highway Safety Manual’s calibrated or uncalibrated safety performance functions. Can. J. Civ. Eng. 2013, 40, 517–527. [Google Scholar] [CrossRef]
- Sacchi, E.; Persaud, B.; Bassani, M. Assessing International Transferability of Highway Safety Manual Crash Prediction Algorithm and Its Components. Transp. Res. Rec. J. Transp. Res. Board 2012, 2279, 90–98. [Google Scholar] [CrossRef]
- Al Kaaf, K.; Abdel-Aty, M. Transferability and Calibration of Highway Safety Manual Performance Functions and Development of New Models for Urban Four-Lane Divided Roads in Riyadh, Saudi Arabia. Transp. Res. Rec. J. Transp. Res. Board 2015, 2515, 70–77. [Google Scholar] [CrossRef]
- Brimley, B.K.; Saito, M.; Schultz, G.G. Calibration of Highway Safety Manual Safety Performance Function. Transp. Res. Rec. J. Transp. Res. Board 2012, 2279, 82–89. [Google Scholar] [CrossRef]
- Lu, J.; Haleem, K.; Alluri, P.; Gan, A. Full versus Simple Safety Performance Functions. Transp. Res. Rec. J. Transp. Res. Board 2013, 2398, 83–92. [Google Scholar] [CrossRef]
- Williamson, M.; Zhou, H. Develop Calibration Factors for Crash Prediction Models for Rural Two-Lane Roadways in Illinois. Procedia Soc. Behav. Sci. 2012, 43, 330–338. [Google Scholar] [CrossRef] [Green Version]
- Xie, F.; Gladhill, K.; Dixon, K.K.; Monsere, C.M. Calibration of Highway Safety Manual Predictive Models for Oregon State Highways. Transp. Res. Rec. J. Transp. Res. Board 2011, 2241, 19–28. [Google Scholar] [CrossRef]
- Fletcher, J.P.; Baguley, C.J.; Sexton, B.; Done, S. Road Accident Modelling for Highway Development and Management in Developing Countries. Main Report: Trials in India and Tanzania; Project Report No: PPR095; UK Department for International Development (DFID): London, UK, 2006.
- Hauer, E.; Persaud, B. Common Bias in Before-and After Accident Comparison and Its Elimination. Transp. Res. Rec. J. Transp. Res. Board 1983, 905, 164–174. [Google Scholar]
- Sun, X.; Li, Y.; Magri, D.; Shirazi, H. Application of Highway Safety Manual Draft Chapter: Louisiana Experience. Transp. Res. Rec. J. Transp. Res. Board 2006, 1950, 55–64. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Iv, W.S.; Carvell, J. Using the Rural Two-Lane Highway Draft Prototype Chapter. Transp. Res. Rec. 2007, 1950, 44–54. [Google Scholar] [CrossRef]
- Martinelli, F.; La Torre, F.; Vadi, P. Calibration of the Highway Safety Manual’s Accident Prediction Model for Italian Secondary Road Network. Transp. Res. Rec. J. Transp. Res. Board 2009, 2103, 1–9. [Google Scholar] [CrossRef]
- Koorey, G. Calibration of Highway Crash Prediction Models for Other Countries: A Case Study with IHSDM. In Proceedings of the 4th International Symposium on Highway Geometric Design, Valencia, Spain, 2–5 June 2010. [Google Scholar]
- Persaud, B.; Lyon, C.; Faisal, S.; Chen, Y.; James, B. Adoption of Highway Safety Manual methodologies for safety assessment of Canadian roads. In Proceedings of the 2012 Conference of the Transportation Association of Canada, Fredericton, NB, Canada, 14–17 October 2012. [Google Scholar] [CrossRef]
- Srinivasan, R.; Colety, M.; Bahar, G.; Crowther, B.; Farmen, M.; Information, R. Estimation of Calibration Functions for Predicting Crashes on Rural Two-Lane Roads in Arizona. Transp. Res. Rec. J. Transp. Res. Board 2016, 2583, 17–24. [Google Scholar] [CrossRef]
- Srinivasan, S.; Haas, P.; Dhakar, N.S.; Hormel, R.; Torbic, D.; Harwood, D. Development and Calibration of Highway Safety Manual Equations for Florida Conditions; Florida Department of Transportation Research Center: Tallahassee, FL, USA, 2011.
- Dixon, K.; Monsere, C.; Xie, F.; Gladhill, K. Calibrating the Highway Safety Manual Predictive Methods for Oregon Highways Final Report; Oregon Transportation Research and Education Consort: Portland, OR, USA, 2013. [Google Scholar]
- Kweon, Y.J.; Lim, I.K. Development of Safety Performance Functions for Multilane Highway and Freeway Segments Maintained by the Virginia Department of Transportation; (No. FHWA/VCTIR 14-R14); Virginia Center for Transportation Innovation and Research: Charlottesville, VA, USA, 2014. [Google Scholar]
- Srinivasan, R.; Carter, D. Development of Safety Performance Functions for North Carolina; (No. FHWA/NC/2010-09); North Carolina Department of Transportation Research and Analysis Group: Chapel Hill, NC, USA, 2011.
- Farid, A.; Abdel-Aty, M.; Lee, J. Transferring and calibrating safety performance functions among multiple States. Accid. Anal. Prev. 2018, 117, 276–287. [Google Scholar] [CrossRef] [PubMed]
- Cafiso, S.; Di Silvestro, G.; Di Guardo, G. Application of Highway Safety Manual to Italian Divided Multilane Highways. Procedia Soc. Behav. Sci. 2012, 53, 910–919. [Google Scholar] [CrossRef] [Green Version]
- Reurings, M.; Janssen, T. Accident Prediction Models for Urban and Rural Carriageways; Report R-2006-14; SWOV Institute for Road Safety Research: Leidschendam, The Netherlands, 2007. [Google Scholar]
- Šenk, P.; Ambros, J.; Pokorný, P.; Striegler, R. Use of Accident Prediction Models in Identifying Hazardous Road Locations. Trans. Transp. Sci. 2012, 5, 223–232. [Google Scholar] [CrossRef] [Green Version]
- Choi, E.; Kim, E.; Cho, H.; Yang, J. Development of a Korea highway safety evaluation proto type model on the concept of IHSDM crash prediction module. Int. J. Urban Sci. 2014, 18, 61–75. [Google Scholar] [CrossRef]
- Ackaah, W.; Salifu, M. Crash prediction model for two-lane rural highways in the Ashanti region of Ghana. IATSS Res. 2011, 35, 34–40. [Google Scholar] [CrossRef] [Green Version]
- Wu, L.; Lord, D.; Zou, Y. Validation of Crash Modification Factors Derived from Cross-Sectional Studies with Regression Models. Transp. Res. Rec. J. Transp. Res. Board 2015, 2514, 88–96. [Google Scholar] [CrossRef]
- R Development Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019. [Google Scholar]
- Lawless, J.F. Negative binomial and mixed poisson regression. Can. J. Stat. 1987, 15, 209–225. [Google Scholar] [CrossRef]
- Hauer, E. The Art of Regression Modeling in Road Safety; Springer: New York, NY, USA, 2015. [Google Scholar]
- Begum, S.M. Investigation of Model Calibration Issues in the Safety Performance Assessment of Ontario Highways. Ph.D. Thesis, Ryerson University, Toronto, ON, Canada, 2008. [Google Scholar]
- Qian, Y.; Zhang, X.; Fei, G.; Sun, Q.; Li, X.; Stallones, L.; Xiang, H. Forecasting deaths of road traffic injuries in China using an artificial neural network. Traffic Inj. Prev. 2020, 1–6. [Google Scholar] [CrossRef]
- Vogt, A.; Joe, B. Accident Models for Two-Lane Rural. Transp. Res. Rec. 2014, 1635, 18–29. [Google Scholar] [CrossRef]
- StatPages. Interactive Statistics—One-Way ANOVA from Summary Data. 2019. Available online: https://statpages.info/anova1sm.html (accessed on 12 November 2019).


{kind=link}
| # | Author | Facility Type | Calibration Factor (Cr) | Transferability Assessment |
|---|---|---|---|---|
| 1 | Sun et al. [36] | Rural two-lane roads in Louisiana State (USA) | Cr = 2.28 for AADT < 10,000vpd Cr = 1.49 for AADT > 10,000vpd | The HSM SPFs underestimate crashes in Louisiana State. |
| 2 | Fitzpatrick et al. [37] | Rural two-lane roads in Texas State (USA) | Cr = 1.12 | The HSM SPFs slight under-predict crashes in Texas State. |
| 3 | Martinelli et al. [38] | Rural two-lane roads in Italian Province of Arezzo | Cr = 0.38 | The HSM SPFs overestimate crashes in Arezzo. |
| 4 | Koorey [39] | Rural two-lane undivided roads in New Zealand | Cr = 0.89 | The HSM SPFs predict New Zealand’s crashes reasonably well. |
| 5 | Persaud et al. [40] | Rural two-way undivided roads in Ontario (Canada) | Cr = 0.74 | The HSM SPFs overestimate crashes in Ontario. |
| 6 | Srinivasan et al. [41] | Rural two-lane roads in Arizona (USA) | Cr = 1.079 | The HSM SPFs predict Arizona crashes very well |
| 7 | Srinivasan et al. [42] | Rural-multilane divided roads in Florida (USA) | Cr =0.664 | The HSM SPFs over estimate crashes in Florida state. |
| 8 | Brimley et al. [30] | Rural two-lane roads in Utah State (USA) | Cr = 1.16 | The HSM SPFs slight under-predict crashes in Utah State. |
| 9 | Sacchi et al. [28] | Italian two-lane undivided rural roads | Cr = 0.44 | The HSM SPFs overestimate crashes on Italian roads. |
| 10 | Dixon et al. [43] | Rural-multilane divided roads in Oregon (USA) | Cr = 0.77 | The HSM SPFs over estimate crashes in Oregon state. |
| 11 | Sun et al. [26] | Rural-multilane divided roads in Missouri (USA) | Cr = 0.98 | The HSM SPFs predict Missouri crashes very well |
| 12 | Agostino [19] | Italian rural roads | Cr = 1.26 | The HSM SPFs underestimate crashes on Italian roads. |
| 13 | Asal & Said [1] | Rural-multilane divided rural roads in Egypt | Cr = 0.48 | The HSM SPFs over estimate crashes in Egypt |
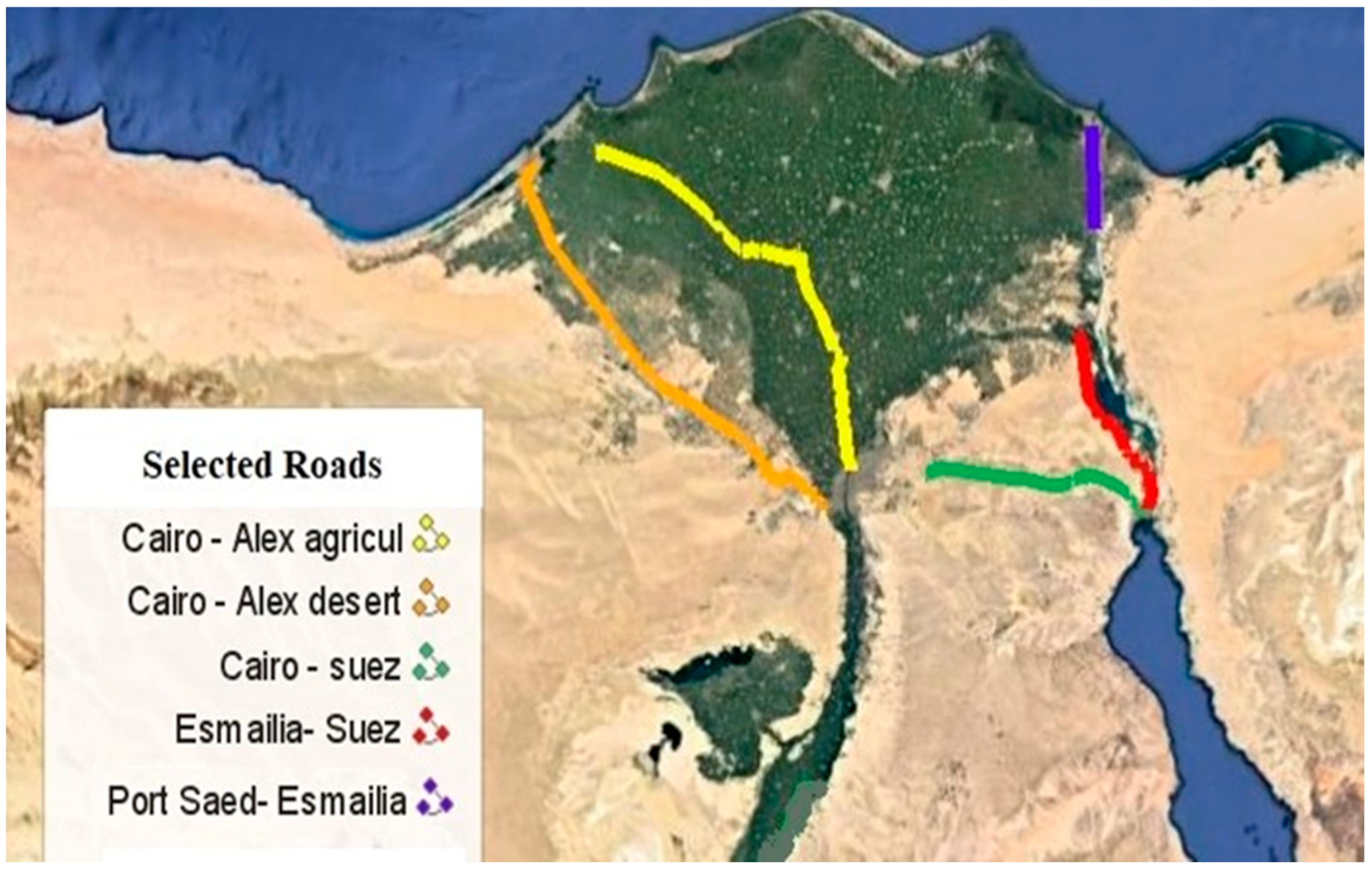
| Road Code | Road Name | Length (Km) |
|---|---|---|
| RD1 | Cairo- Alexandria agriculture road | 50 |
| RD2 | Cairo- Alexandria desert road | 108 |
| RD3 | Cairo- Suez desert road | 73 |
| RD4 | Ismailia-Port Said desert road | 30 |
| RD5 | Ismailia-Suez desert road | 61 |
| Road | Total Crashes/Year | Number of Sections | |||
|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | ||
| RD1 | 271.75 | 50 | 16 | 28 | 30 |
| RD2 | 46.75 | 108 | 21 | 51 | 55 |
| RD3 | 47.50 | 73 | 31 | 41 | 48 |
| RD4 | 69.0 | 30 | 13 | 13 | 21 |
| RD5 | 24.0 | 61 | 34 | 44 | 40 |
| Total | 459.0 | 322 | 115 | 177 | 194 |
| Geometric Element | Maximum | Minimum | Mean | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Segmentation Method | Segmentation Method | Segmentation Method | ||||||||||
| S1 | S2 | S3 | S4 | S1 | S2 | S3 | S4 | S1 | S2 | S3 | S4 | |
| L (km) a | 1.00 | 12.00 | 7.00 | 6.0 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 2.78 | 1.81 | 1.65 |
| Accesses b | 14 | 50 | 25 | 27 | 0 | 0 | 0 | 0 | 2.19 | 6.12 | 3.97 | 4.00 |
| Uturn c | 2.00 | 7.00 | 4.00 | 7.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.38 | 1.04 | 0.69 | 1.00 |
| NHL d | 2.00 | 5.00 | 5.00 | 5.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.34 | 0.95 | 0.61 | 1.00 |
| AADT e | 107,947 | 14,101 | 32,212 | |||||||||
| PW f | 13 | 5.50 | 9.52 | |||||||||
| SW g | 5.00 | 1.69 | 3.24 | |||||||||
| MW h | 44.32 | 1.60 | 8.73 | |||||||||
| Nlanes i | 4 | 2 | 3.05 | |||||||||
| Model | SPF | Reference |
|---|---|---|
| HSM | AASHTO [17] | |
| Virginia | Kweon et al. [44] | |
| North-Carolina | Srinivasan and Carter [45] | |
| Alabama | Mehta & Lou [21] | |
| Ohio | Farid et al. [46] | |
| Italy (2012) | Cafiso et al. [47] | |
| Italy (2017) | Cafiso et al. [24] | |
| Netherlands | Reurings & Janssen [48] | |
| Czech Rep. | Šenk et al. [49] | |
| Korea | Choi et al. [50] | |
| Ghana | Ackaah & Salifu [51] |
| CMFi | Value |
|---|---|
| CMFSW | |
| CMFPW | |
| CMFAccesses | |
| CMFHL |
| Variable | Segmentation Method | |||
|---|---|---|---|---|
| S1 | S2 | S3 | S4 | |
| Recalibrated overdispersion parameter (k) | 2809 | 2579 | 2.965 | 2.713 |
| Observed crashes | 1836 | |||
| Predicted crashes using HSM default CMFs | 5695 | 5676 | 5678 | 5675 |
| Calibration factor using HSM default CMFs (Cr) | 0.322 a,b,c,g (0.066) * | 0.323 a,d,e,g (0.127) | 0.323 b,d,g (0.115) | 0.323 c,e,g (0.102) |
| Predicted crashes using Local CMFs | 4692 | 2488 | 3706 | 3823 |
| Calibration factor using Local CMFs | 0.391 a,b,c,g (0.081) | 0.738 a,g (0.289) | 0.495 b,g (0.176) | 0.480 c,g (0.151) |
| Model | Nobs. | S1 | S2 | S3 | S4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| k | Npred. | Cr | k | Npred. | Cr | k | Npred. | Cr | k | Npred. | Cr | ||
| HSM | 1836 | 2.809 | 4692 | 0.391 a,b,c (0.081) * | 2.580 | 2488 | 0.738 a (0.289) | 2.966 | 3706 | 0.495 b (0.176) | 2.713 | 3823 | 0.480 c (0.151) |
| Virginia | 2.551 | 3760 | 0.488 a,b,c (0.096) | 2.379 | 1997 | 0.919 a (0.346) | 2.714 | 2965 | 0.619 b (0.210) | 2.475 | 3055 | 0.601 c (0.181) | |
| N. Carolina | 3.210 | 5506 | 0.333 a,b,c (0.073) | 3.004 | 2931 | 0.626 a (0.265) | 3.537 | 4338 | 0.423 b (0.164) | 3.099 | 4467 | 0.411 c (0.138) | |
| Alabama | 2.972 | 5636 | 0.326 a,b,c (0.069) | 2.229 | 1305 | 1.406 a,d,e (0.516) | 3.499 | 2487 | 0.738 b,d (0.284) | 2.564 | 2792 | 0.658 c,e (0.201) | |
| Ohio | 1.812 | 2436 | 0.754 a,b,c (0.125) | 1.675 | 1302 | 1.410 a (0.446) | 1.934 | 1945 | 0.944 b (0.271) | 1.784 | 1996 | 0.920 c (0.235) | |
| Italy (2012) | 1.657 | 2039 | 0.901 a,b,c (0.143) | 1.611 | 1082 | 1.697 a (0.526) | 1.800 | 1613 | 1.138 b (0.315) | 1.741 | 1665 | 1.103 c (0.278) | |
| Italy (2017) | 1.752 | 2177 | 0.843 a,b,c (0.138) | 1.634 | 1156 | 1.588 a (0.496) | 1.838 | 1725 | 1.065 b (0.298) | 1.775 | 1781 | 1.031 c (0.263) | |
| Netherlands | 1.966 | 1914 | 0.959 a,b,c (0.166) | 1.852 | 990 | 1.854 a (0.616) | 2.050 | 1469 | 1.250 b (0.369) | 1.892 | 1519 | 1.209 c (0.318) | |
| Czech | 2.987 | 5045 | 0.364 a,b,c (0.077) | 2.708 | 2527 | 0.727 a (0.292) | 3.122 | 3834 | 0.479 b (0.174) | 2.854 | 3982 | 0.461 c (0.149) | |
| Korea | 3.921 | 8958 | 0.205 a,b,c (0.050) | 3.606 | 4752 | 0.386 a (0.179) | 4.083 | 7072 | 0.260 b (0.108) | 3.764 | 7292 | 0.252 c (0.093) | |
| Ghana | 2.323 | 2593 | 0.708 a (0.133) | 2.188 | 761 | 2.413 a,d,e (0.871) | 2.440 | 1388 | 1.323 d (0.426) | 2.148 | 1554 | 1.181 e (0.331) | |
| Model | S1 | S2 | S3 | S4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| New Constant | k | Cr | New Constant | k | Cr | New Constant | k | Cr | New Constant | k | Cr | |
| HSM | −10.202 | 1.605 | 1.134 a,b,c | −10.17 | 1.593 | 1.102 a,d,e | −10.306 | 1.628 | 1.263 b,d | −10.146 | 1.694 | 1.076 c,e |
| (0.177) * | (0.334) | (0.332) | (0.265) | |||||||||
| Virginia | −8.458 | 1.642 | 1.184 a,b,c | −8.455 | 1.561 | 1.185 a,d,e | −8.575 | 1.65 | 1.335 b,d | −8.423 | 1.687 | 1.147 c,e |
| (0.187) | (0.362) | (0.354) | (0.282) | |||||||||
| N. Carolina | −7.278 | 1.688 | 1.202 a,b,c | −7.295 | 1.593 | 1.228 a,d,e | −7.426 | 1.691 | 1.4 b,d | −7.256 | 1.788 | 1.181 c,e |
| (0.193) | (0.379) | (0.375) | (0.138) | |||||||||
| Alabama | −7.394 | 1.697 | 1.204 a,b,c | −9.41 | 1.564 | 1.141 a,d,e | −7.094 | 2.078 | 1.4 b,d | −7.091 | 1.799 | 1.308 c,e |
| (0.194) | (0.346) | (0.416) | (0.335 | |||||||||
| Ohio | −10.219 | 1.581 | 1.154 a,b,c | −10. 191 | 1.642 | 1.130 a,d,e | −10.323 | 1.538 | 1.285 b,d | −10. 172 | 1.546 | 1.104 c,e |
| (0.176) | (0.331) | (0.329) | (0.263) | |||||||||
| Italy (2012) | −18.826 | 1.568 | 1.084 a,b,c | −18.774 | 1.542 | 1.031 a,d,e | −18.937 | 1.62 | 1.214 b,d | −18.757 | 1.669 | 1.014 c,e |
| (0.168) | (0.313) | (0.319) | (0.251) | |||||||||
| Italy (2017) | −19.545 | 1.605 | 1.05 a,b,c | −19.481 | 1.549 | 0.987 a,d,e | −19.639 | 1.627 | 1.156 b,d | −19.467 | 1.685 | 0.974 c,e |
| (0.164) | (0.3) | (0.304) | (0.242) | |||||||||
| Netherlands | −10.5 | 1.865 | 1.195 a,b,c | −10.531 | 1.741 | 1.296 a,d,e | −10.621 | 1.861 | 1.393 b,d | −10.498 | 1.792 | 1.227 c,e |
| (0.201) | (0.418) | (0.392) | (0.314) | |||||||||
| Czech | −14.921 | 1.627 | 1.172 a,b,c | −14.867 | 1.556 | 1.19 a,d,e | −15.006 | 1.653 | 1.333 b,d | −14.861 | 1.699 | 1.147 c,e |
| (0.184) | (0.363) | (0.353) | (0.282) | |||||||||
| Korea | −17.081 | 1.612 | 1.157 a,b,c | −17.057 | 1.553 | 1.128 a,d,e | −17.189 | 1.629 | 1.287 b,d | −17.031 | 1.691 | 1.099 c,e |
| (0.18) | (0.342) | (0.338) | (0.27) | |||||||||
| Ghana | −2.51 | 1.979 | 1.166 a,b,c | −1.933 | 2.188 | 1.372 a,d,e | −2.23 | 2.348 | 1.359 b,d | −2.234 | 2.053 | 1.279 c,e |
| (0.202) | (0.495) | (0.429) | (0.35) | |||||||||
| S1 Segmentation Method | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SPF Model | MAD | MBP | MAPE | χp2 | σ(χp2) | Z−score | ||||||
| Local CMFs | New Constant | Local CMFs | New Constant | Local CMFs | New Constant | Local CMFs | New Constant | Local CMFs | New Constant | Local CMFs | New Constant | |
| HSM | 10.717 | 4.781 | 8.870 | −0.673 | 1.880 | 0.838 | 71.423 | 293.208 | 77.922 | 61.315 | −3.216 | −0.469 |
| Virginia | 9.094 | 5.013 | 5.977 | −1.180 | 1.595 | 0.836 | 76.460 | 285.254 | 74.656 | 61.886 | −3.289 | −0.594 |
| N. Carolina | 13.146 | 5.069 | 11.398 | −0.960 | 2.306 | 0.889 | 66.012 | 287.028 | 82.738 | 62.583 | −3.094 | −0.559 |
| Alabama | 13.730 | 5.089 | 11.798 | 0.968 | 2.408 | 0.893 | 68.819 | 288.034 | 79.910 | 62.727 | −3.168 | −0.541 |
| Ohio | 6.583 | 4.675 | 1.864 | −0.762 | 1.154 | 0.820 | 119.594 | 284.803 | 64.420 | 59.940 | −3.142 | −0.621 |
| Italy (1) | 5.946 * | 4.670 ** | 0.630 * | −0.440 ** | 1.043 * | 0.819 ** | 179.548 | 309.559 | 62.083 | 60.756 | −2.295 * | −0.205 ** |
| Italy (2) | 5.996 ** | 4.624 * | 1.060 ** | −0.269 * | 1.052 ** | 0.811 * | 166.785 | 312.470 | 63.543 | 61.340 | −2.443 ** | −0.155 * |
| Netherlands | 6.604 | 5.363 | 1.243 | −0.930 | 1.158 | 0.940 | 70.159 | 290.670 | 76.888 | 62.895 | −3.275 | −0.498 |
| Czech Rep. | 11.708 | 4.902 | 9.965 | −0.837 | 2.053 | 0.860 | 68.558 | 286.699 | 80.092 | 61.657 | −3.164 | −0.573 |
| Korea | 22.356 | 4.832 | 22.118 | −0.749 | 3.921 | 0.848 | 60.885 | 289.918 | 90.667 | 61.422 | −2.880 | −0.522 |
| Ghana | 7.868 | 5.533 | 2.352 | −0.811 | 1.380 | 0.970 | 122.362 | 348.290 | 71.650 | 66.895 | −2.786 | 0.393 |
| S2 Segmentation Method | ||||||||||||
| HSM | 12.885 | 9.601 | 4.530 | −1.182 | 1.011 | 0.753 | 26.560 | 93.582 | 44.837 | 44.837 | −1.972 | −0.595 |
| Virginia | 12.567 | 9.945 | 1.120 | −1.993 | 1.986 | 0.780 | 27.613 | 90.811 | 43.261 | 43.261 | −2.020 | −0.668 |
| N. Carolina | 15.858 | 10.161 | 7.607 | −2.369 | 1.244 | 0.797 | 24.716 | 90.754 | 47.986 | 47.986 | −1.881 | −0.664 |
| Alabama | 12.462 | 9.762 | −3.685 | −1.576 | 0.977 | 0.766 | 36.286 | 91.967 | 42.048 | 42.048 | −1.872 | −0.639 |
| Ohio | 10.993 | 9.400 | −3.708 | −1.463 | 0.862 | 0.737 | 37.252 | 89.532 | 40.610 | 40.610 | −1.997 | −0.727 |
| Italy (1) | 10.689 ** | 9.382 ** | −5.238 ** | −0.389 ** | 0.838 ** | 0.736 ** | 60.680 | 96.620 | 36.662 | 36.662 | −1.482 * | −0.510 ** |
| Italy (2) | 10.581 * | 9.270 * | −4.721 * | 0.163 * | 0.830 * | 0.727 * | 58.974 | 98.557 | 36.878 | 36.878 | −1.519 ** | −0.455 * |
| Netherlands | 11.458 | 10.648 | −5.871 | −2.915 | 0.899 | 0.835 | 53.716 | 90.094 | 38.844 | 38.844 | −1.578 | −0.714 |
| Czech Rep. | 13.701 | 9.782 | 4.802 | −2.036 | 1.075 | 0.767 | 25.797 | 90.919 | 45.812 | 45.812 | −1.947 | −0.666 |
| Korea | 22.514 | 9.708 | 20.253 | −1.450 | 1.766 | 0.761 | 23.369 | 92.521 | 52.135 | 52.135 | −1.758 | −0.624 |
| Ghana | 11.992 | 11.458 | −7.473 | −3.459 | 0.941 | 0.899 | 47.923 | 93.439 | 36.719 | 36.719 | −1.826 | −0.604 |
| S3 Segmentation Method | ||||||||||||
| HSM | 15.037 | 7.992 | 10.566 | −2.162 | 1.450 | 0.770 | 37.719 | 149.175 | 59.196 | 45.636 | −2.353 | −0.610 |
| Virginia | 13.547 | 8.252 | 6.379 | −2.605 | 1.306 | 0.796 | 39.276 | 144.694 | 56.894 | 45.965 | −2.421 | −0.703 |
| N. Carolina | 18.660 | 8.394 | 14.137 | −2.964 | 1.799 | 0.809 | 35.295 | 151.525 | 62.883 | 46.432 | −2.253 | −0.549 |
| Alabama | 13.714 | 9.175 | 3.676 | −2.963 | 1.322 | 0.885 | 43.441 | 144.405 | 58.054 | 46.634 | −2.301 | −0.699 |
| Ohio | 10.445 | 7.882 | 1.615 | −2.301 | 1.007 | 0.760 | 54.672 | 144.180 | 49.097 | 44.680 | −2.492 | −0.735 |
| Italy (1) | 9.585 ** | 7.773 ** | −1.259 ** | −1.826 ** | 0.924 ** | 0.749 ** | 75.859 | 158.888 | 47.636 | 45.643 | −2.123 * | −0.397 ** |
| Italy (2) | 9.572 * | 7.678 * | −0.629 * | −1.402 * | 0.923 * | 0.740 * | 73.503 | 159.278 | 48.061 | 45.722 | −2.153 ** | −0.388 * |
| Netherlands | 10.501 | 8.858 | −2.072 | −2.926 | 1.012 | 0.854 | 66.624 | 157.078 | 52.324 | 48.321 | −2.193 | −0.412 |
| Czech Rep. | 16.198 | 8.209 | 11.288 | −2.591 | 1.562 | 0.791 | 36.637 | 145.992 | 60.583 | 46.005 | −2.317 | −0.674 |
| Korea | 30.188 | 8.071 | 29.581 | −2.313 | 2.910 | 0.778 | 29.039 | 147.401 | 68.488 | 45.691 | −2.160 | −0.648 |
| Ghana | 10.501 | 9.773 | 11.288 | −2.738 | 1.059 | 0.942 | 71.171 | 117.476 | 48.486 | 78.527 | −2.183 | −0.758 |
| S4 Segmentation Method | ||||||||||||
| HSM | 13.659 | 7.493 | 10.242 | −0.668 | 1.443 | 0.792 | 43.319 | 163.096 | 59.548 | 48.158 | −2.530 | −0.642 |
| Virginia | 12.099 | 7.771 | 6.285 | −1.213 | 1.278 | 0.821 | 45.698 | 155.991 | 57.180 | 48.196 | −2.594 | −0.789 |
| N. Carolina | 16.968 | 7.951 | 13.562 | −1.454 | 1.793 | 0.840 | 40.068 | 153.741 | 63.209 | 48.439 | −2.435 | −0.831 |
| Alabama | 12.681 | 8.063 | 4.928 | −2.228 | 1.340 | 0.852 | 46.082 | 164.059 | 58.077 | 49.858 | −2.547 | −0.601 |
| Ohio | 9.405 | 7.436 | 0.924 | −0.890 | 0.994 | 0.776 | 72.072 | 158.497 | 49.672 | 46.845 | −2.455 | −0.758 |
| Italy (2012) | 8.748 ** | 7.347 ** | −0.880 ** | −0.130 * | 0.924 ** | 0.776 ** | 109.561 | 169.772 | 49.178 | 48.355 | −1.717 * | −0.501 ** |
| Italy (2017) | 8.720 * | 7.263 * | −0.282 * | 0.256 ** | 0.921 * | 0.767 * | 105.363 | 171.620 | 49.583 | 48.547 | −1.788 ** | −0.461 * |
| Netherlands | 9.599 | 8.346 | −1.636 | −1.751 | 1.014 | 0.882 | 92.172 | 162.146 | 50.914 | 49.777 | −2.000 | −0.640 |
| Czech Rep. | 14.739 | 7.667 | 11.063 | −1.213 | 1.557 | 0.810 | 41.700 | 156.258 | 60.910 | 48.108 | −2.500 | −0.785 |
| Korea | 28.439 | 7.572 | 28.126 | −0.850 | 3.005 | 0.800 | 37.504 | 160.706 | 69.064 | 48.130 | −2.266 | −0.690 |
| Ghana | 10.024 | 8.566 | −1.453 | −2.065 | 1.059 | 0.905 | 96.587 | 124.462 | 53.758 | 52.720 | −1.812 | −1.319 |
| Model | Segmentation S1 | Segmentation S2 | Segmentation S3 | Segmentation S4 | ||||
|---|---|---|---|---|---|---|---|---|
| Fixed k | Variable k | Fixed k | Variable k | Fixed k | Variable k | Fixed k | Variable k | |
| HSM | 0.391 (0.081) * | 0.391 (0.081) | 0.738 (0.289) | 0.738 (0.266) | 0.495 (0.176) | 0.495 (0.128) | 0.480 (0.151) | 0.480 (0.117) |
| Virginia | 0.488 (0.096) | 0.488 (0.096) | 0.919 (0.346) | 0.919 (0.270) | 0.619 (0.210) | 0.619 (0.152) | 0.601 (0.181) | 0.601 (0.139) |
| N. Carolina | 0.333 (0.073) | 0.333 (0.073) | 0.626 (0.265) | 0.626 (0.204) | 0.423 (0.164) | 0.423 (0.116) | 0.411 (0.138) | 0.411 (0.106) |
| Alabama | 0.326 (0.069) | 0.326 (0.069) | 1.406 (0.516) | 1.406 (0.370) | 0.738 (0.284) | 0.738 (0.178) | 0.658 (0.201) | 0.658 (0.148) |
| Ohio | 0.754 (0.125) | 0.754 (0.125) | 1.410 (0.446) | 1.410 (0.365) | 0.944 (0.271) | 0.944 (0.199) | 0.920 (0.235) | 0.920 (0.182) |
| Italy (2012) | 0.901 (0.143) | 0.901 (0.143) | 1.697 (0.526) | 1.697 (0.417) | 1.138 (0.315) | 1.138 (0.234) | 1.103 (0.278) | 1.103 (0.212) |
| Italy (2017) | 0.843 (0.138) | 0.843 (0.138) | 1.588 (0.496) | 1.588 (0.343) | 1.065 (0.298) | 1.065 (0.221) | 1.031 (0.263) | 1.031 (0.201) |
| Netherlands | 0.959 (0.166) | 0.959 (0.166) | 1.854 (0.616) | 1.854 (0.480) | 1.250 (0.369) | 1.250 (0.272) | 1.209 (0.318) | 1.209 (0.247) |
| Czech Rep. | 0.364 (0.077) | 0.364 (0.077) | 0.727 (0.292) | 0.727 (0.226) | 0.479 (0.174) | 0.479 (0.126) | 0.461 (0.149) | 0.461 (0.114) |
| Korea | 0.205 (0.050) | 0.205 (0.050) | 0.386 (0.179) | 0.386 (0.139) | 0.260 (0.108) | 0.260 (0.078) | 0.252 (0.093) | 0.252 (0.072) |
| Ghana | 0.708 (0.133) | 0.708 (0.133) | 2.413 (0.871) | 2.413 (0.675) | 1.323 (0.426) | 1.323 (0.317) | 1.181 (0.331) | 1.181 (0.255) |
| Model | Segmentation S1 | Segmentation S2 | Segmentation S3 | Segmentation S4 | ||||
|---|---|---|---|---|---|---|---|---|
| Fixed k | Variable k | Fixed k | Variable k | Fixed k | Variable k | Fixed k | Variable k | |
| HSM | 1.134 (0.177) * | 1.134 (0.177) | 1.102 (0.334) | 1.102 (0.263) | 1.263 (0.332) | 1.263 (0.253) | 1.076 (0.265) | 1.076 (0.201) |
| Virginia | 1.184 (0.187) | 1.184 (0.187) | 1.185 (0.362) | 1.185 (0.285) | 1.335 (0.354) | 1.335 (0.270) | 1.147 (0.282) | 1.147 (0.216) |
| N. Carolina | 1.202 (0.193) | 1.202 (0.193) | 1.228 (0.379) | 1.228 (0.299) | 1.400 (0.375) | 1.4 (0.288) | 1.181 (0.138) | 1.181 (0.226) |
| Alabama | 1.204 (0.194) | 1.204 (0.194) | 1.141 (0.346) | 1.141 (0.273) | 1.400 (0.416) | 1.4 (0.327) | 1.308 (0.335) | 1.308 (0.261) |
| Ohio | 1.154 (0.176) | 1.154 (0.176) | 1.130 (0.331) | 1.130 (0.262) | 1.285 (0.329) | 1.285 (0.251) | 1.104 (0.263) | 1.104 (0.201) |
| Italy (2012) | 1.084 (0.168) | 1.084 (0.168) | 1.031 (0.313) | 1.031 (0.247) | 1.214 (0.319) | 1.214 (0.243) | 1.014 (0.251) | 1.014 (0.190) |
| Italy (2017) | 1.050 (0.164) | 1.050 (0.164) | 0.987 (0.300) | 0.987 (0.206) | 1.156 (0.304) | 1.156 (0.232) | 0.974 (0.242) | 0.974 (0.183) |
| Netherlands | 1.195 (0.201) | 1.195 (0.201) | 1.296 (0.418) | 1.296 (0.330) | 1.393 (0.392) | 1.393 (0.300) | 1.227 (0.314) | 1.227 (0.245) |
| Czech Rep. | 1.172 (0.184) | 1.172 (0.184) | 1.190 (0.363) | 1.190 (0.285) | 1.333 (0.353) | 1.333 (0.271) | 1. 147 (0.282) | 1.147 (0.215) |
| Korea | 1.157 (0.180) | 1.157 (0.180) | 1.128 (0.342) | 1.128 (0.270) | 1.287 (0.338) | 1.287 (0.259) | 1.099 (0.270) | 1.099 (0.206) |
| Ghana | 1.166 (0.202) | 1.166 (0.202) | 1.372 (0.495) | 1.372 (0.384) | 1.359 (0.429) | 1.359 (0.336) | 1.279 (0.350) | 1.279 (0.279) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elagamy, S.R.; El-Badawy, S.M.; Shwaly, S.A.; Zidan, Z.M.; Shahdah, U.E. Segmentation Effect on the Transferability of International Safety Performance Functions for Rural Roads in Egypt. Safety 2020, 6, 43. https://doi.org/10.3390/safety6030043
Elagamy SR, El-Badawy SM, Shwaly SA, Zidan ZM, Shahdah UE. Segmentation Effect on the Transferability of International Safety Performance Functions for Rural Roads in Egypt. Safety. 2020; 6(3):43. https://doi.org/10.3390/safety6030043
Chicago/Turabian StyleElagamy, Sania Reyad, Sherif M. El-Badawy, Sayed A. Shwaly, Zaki M. Zidan, and Usama Elrawy Shahdah. 2020. "Segmentation Effect on the Transferability of International Safety Performance Functions for Rural Roads in Egypt" Safety 6, no. 3: 43. https://doi.org/10.3390/safety6030043
APA StyleElagamy, S. R., El-Badawy, S. M., Shwaly, S. A., Zidan, Z. M., & Shahdah, U. E. (2020). Segmentation Effect on the Transferability of International Safety Performance Functions for Rural Roads in Egypt. Safety, 6(3), 43. https://doi.org/10.3390/safety6030043