
Finger Kinematics during Human Hand Grip and Release


Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Procedures
2.3. Measures
2.4. Statistical Analysis
3. Results
3.1. Dynamic ROM
3.2. Peak Velocity
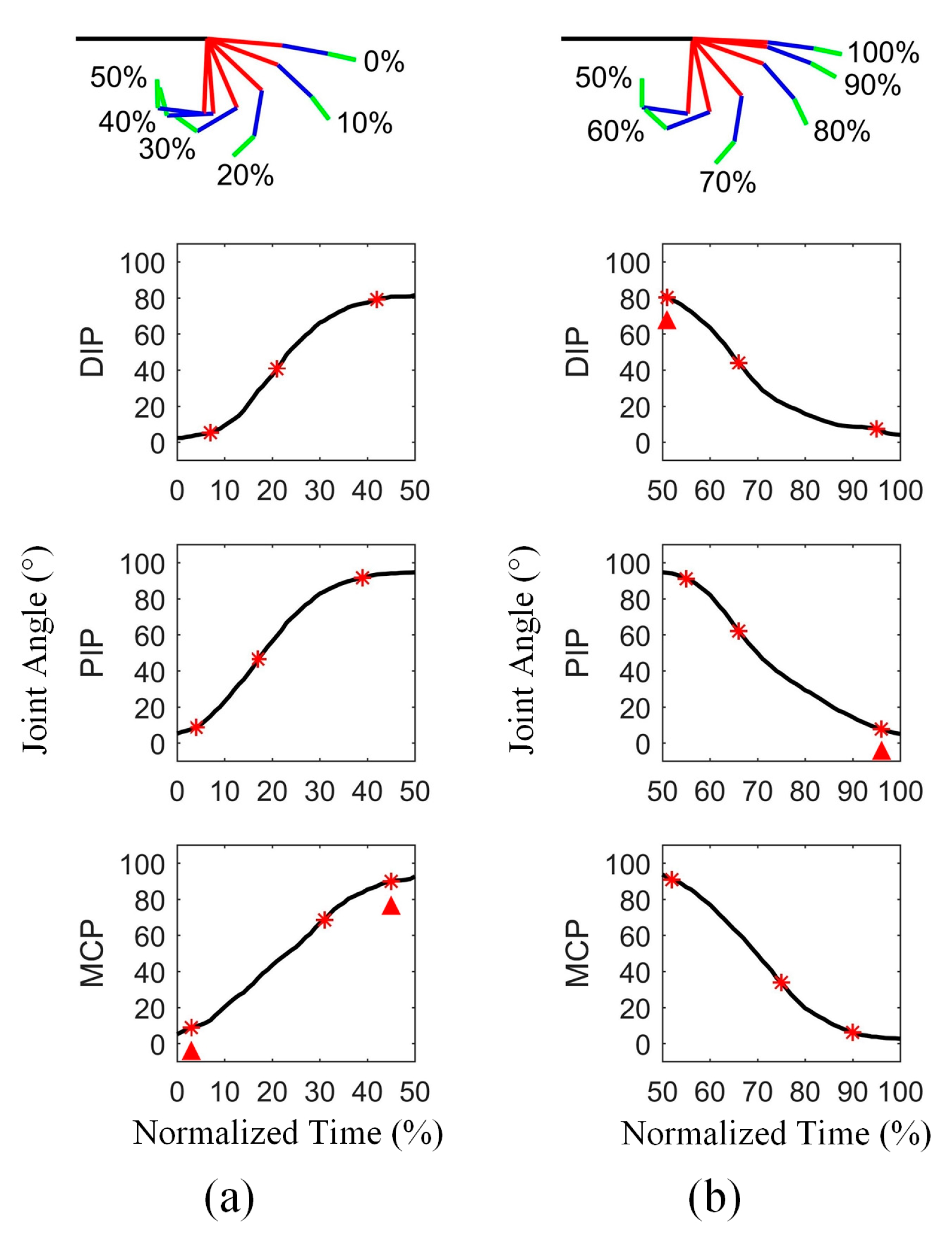
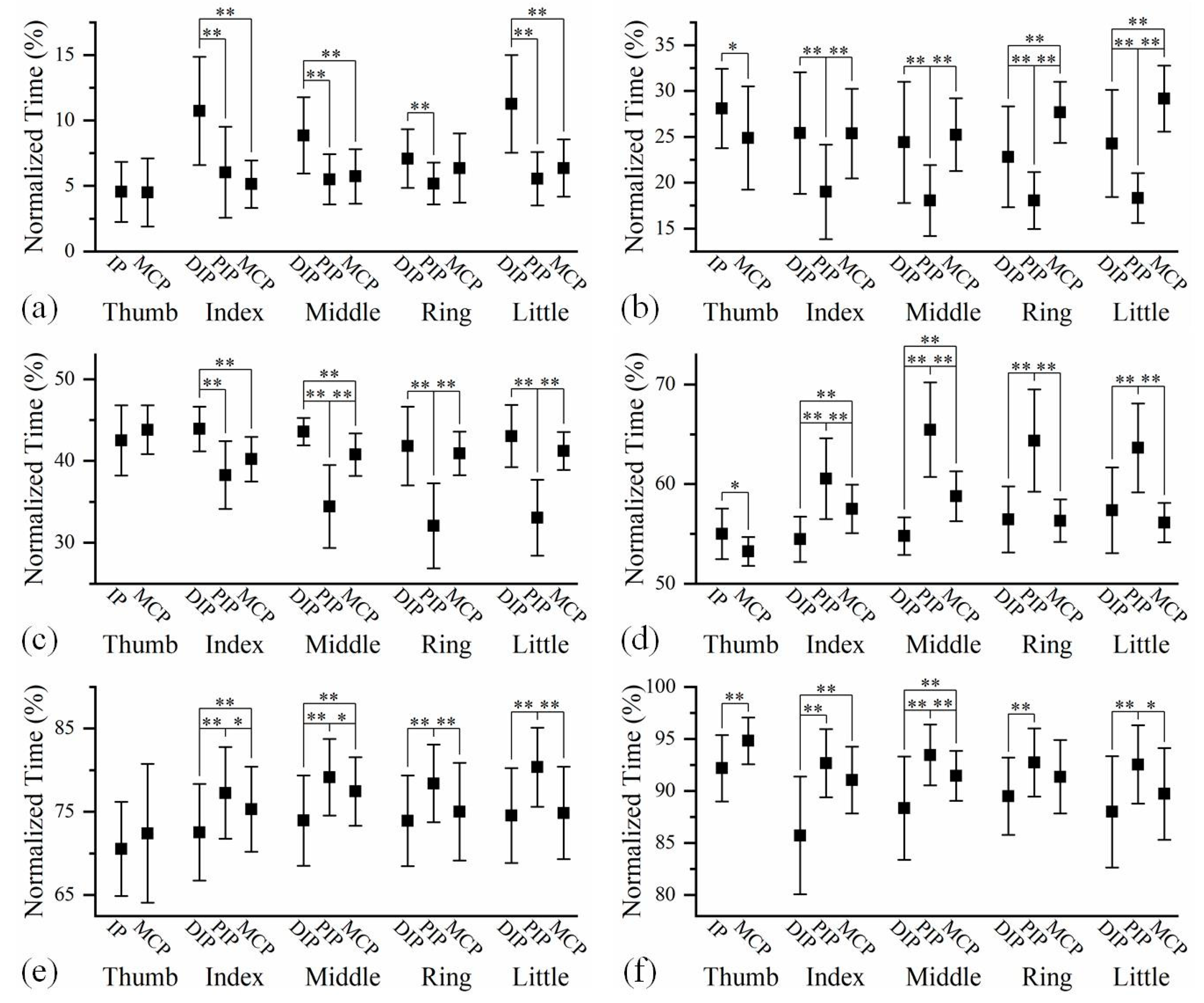
3.3. Joint Sequence
3.4. Finger Sequence
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Sobinov, A.R.; Bensmaia, S.J. The neural mechanisms of manual dexterity. Nat. Rev. Neurosci. 2021, 22, 741–757. [Google Scholar] [CrossRef] [PubMed]
- Bensmaia, S.J.; Tyler, D.J.; Micera, S. Restoration of sensory information via bionic hands. Nat. Biomed. Eng. 2020, 7, 443–455. [Google Scholar] [CrossRef] [PubMed]
- Piazza, C.; Grioli, G.; Catalano, M.; Bicchi, A.J.A.R.O.C. A century of robotic hands. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 1–32. [Google Scholar] [CrossRef]
- Okada, T. Computer control of multijointed finger system for precise object-handling. IEEE Trans. Syst. Man Cybern. 1982, 12, 289–299. [Google Scholar] [CrossRef]
- Jacobsen, S.; Iversen, E.; Knutti, D.; Johnson, R.; Biggers, K. Design of the Utah/MIT dextrous hand. In Proceedings of the 1986 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 7–10 April 1986; pp. 1520–1532. [Google Scholar]
- Laffranchi, M.; Boccardo, N.; Traverso, S.; Lombardi, L.; Canepa, M.; Lince, A.; Semprini, M.; Saglia, J.A.; Naceri, A.; Sacchetti, R. The Hannes hand prosthesis replicates the key biological properties of the human hand. Sci. Robot. 2020, 5, eabb0467. [Google Scholar] [CrossRef]
- Wang, D.; Xiong, Y.; Zi, B.; Qian, S.; Wang, Z.; Zhu, W. Design, analysis and experiment of a passively adaptive underactuated robotic hand with linkage-slider and rack-pinion mechanisms. Mech. Mach. Theory 2021, 155, 104092. [Google Scholar] [CrossRef]
- Mohammadi, A.; Lavranos, J.; Zhou, H.; Mutlu, R.; Alici, G.; Tan, Y.; Choong, P.; Oetomo, D. A practical 3D-printed soft robotic prosthetic hand with multi-articulating capabilities. PLoS ONE 2020, 15, e0232766. [Google Scholar] [CrossRef]
- Gu, G.; Zhang, N.; Xu, H.; Lin, S.; Yu, Y.; Chai, G.; Ge, L.; Yang, H.; Shao, Q.; Sheng, X. A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback. Nat. Biomed. Eng. 2021, 7, 589–598. [Google Scholar] [CrossRef]
- Salvietti, G. Replicating human hand synergies onto robotic hands: A review on software and hardware strategies. Front. Neurorobot. 2018, 12, 27. [Google Scholar] [CrossRef] [Green Version]
- Gracia-Ibáñez, V.; Vergara, M.; Sancho-Bru, J.L.; Mora, M.C.; Piqueras, C. Functional range of motion of the hand joints in activities of the International Classification of Functioning, Disability and Health. J. Hand Ther. 2017, 30, 337–347. [Google Scholar] [CrossRef]
- Ding, W.; Zhang, S.; Wu, D.; Zhang, Y.; Ye, H. Hand function recovery using nerve segment insert grafting in patients with chronic incomplete lower cervical spinal cord injury: A preliminary clinical report. J. Neurorestoratol. 2019, 7, 129–135. [Google Scholar] [CrossRef] [Green Version]
- Jarque-Bou, N.J.; Vergara, M.; Sancho-Bru, J.L.; Gracia-Ibáñez, V.; Roda-Sales, A. A calibrated database of kinematics and EMG of the forearm and hand during activities of daily living. Sci. Data 2019, 6, 270. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Zhi, J.; Ning, B.; Zhang, S. Research progress on limb spasmolysis, orthopedics and functional reconstruction of brain-derived paralysis. J. Neurorestoratol. 2021, 9, 186–195. [Google Scholar] [CrossRef]
- Padilla-Magaña, J.F.; Peña-Pitarch, E.; Sánchez-Suarez, I.; Ticó-Falguera, N. Quantitative assessment of hand function in healthy subjects and post-stroke patients with the action research arm test. Sensors 2022, 22, 3604. [Google Scholar] [CrossRef] [PubMed]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward soft robotics: A decade review of the design of hand exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vertongen, J.; Kamper, D.G.; Smit, G.; Vallery, H. Mechanical aspects of robot hands, active hand orthoses, and prostheses: A comparative review. IEEE ASME Trans. Mechatron. 2020, 26, 955–965. [Google Scholar] [CrossRef]
- Thayer, N.; Priya, S. Design and implementation of a dexterous anthropomorphic robotic typing (DART) hand. SmMaS 2011, 20, 035010. [Google Scholar] [CrossRef] [Green Version]
- Shirafuji, S.; Ikemoto, S.; Hosoda, K. Development of a tendon-driven robotic finger for an anthropomorphic robotic hand. Int. J. Robot. Res. 2014, 33, 677–693. [Google Scholar] [CrossRef]
- Kim, U.; Jung, D.; Jeong, H.; Park, J.; Jung, H.-M.; Cheong, J.; Choi, H.R.; Do, H.; Park, C. Integrated linkage-driven dexterous anthropomorphic robotic hand. Nat. Commun. 2021, 12, 7177. [Google Scholar] [CrossRef]
- Cordella, F.; Zollo, L.; Salerno, A.; Accoto, D.; Guglielmelli, E.; Siciliano, B. Human hand motion analysis and synthesis of optimal power grasps for a robotic hand. Int. J. Adv. Robot. Syst. 2014, 11, 37. [Google Scholar] [CrossRef] [Green Version]
- Somia, N.; Rash, G.; Wachowiak, M.; Gupta, A. The initiation and sequence of digital joint motion: A three-dimensional motion analysis. J. Hand Surg. Eur. Vol. 1998, 23, 792–795. [Google Scholar] [CrossRef]
- Holguín, P.H.; Rico, Á.A.; Gómez, L.P.; Munuera, L.M. The coordinate movement of the interphalangeal joints: A cinematic study. Clin. Orthop. Relat. Res. 1999, 362, 117–124. [Google Scholar]
- Braido, P.; Zhang, X. Quantitative analysis of finger motion coordination in hand manipulative and gestic acts. Hum. Mov. Sci. 2004, 22, 661–678. [Google Scholar] [CrossRef]
- Carpinella, I.; Jonsdottir, J.; Ferrarin, M. Multi-finger coordination in healthy subjects and stroke patients: A mathematical modelling approach. J. Neuroeng. Rehabil. 2011, 8, 19. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mentzel, M.; Benlic, A.; Wachter, N.; Gulkin, D.; Bauknecht, S.; Gülke, J. The dynamics of motion sequences of the finger joints during fist closure. Handchir. Mikrochir. Plast. Chir. 2011, 43, 147–154. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Wen, R.; Shen, Z.; Wang, Z.; Luk, K.D.K.; Hu, Y. A wearable detector for simultaneous finger joint motion measurement. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 644–654. [Google Scholar] [CrossRef]
- Ono, K.; Ebara, S.; Fuji, T.; Yonenobu, K.; Fujiwara, K.; Yamashita, K. Myelopathy hand. New clinical signs of cervical cord damage. J. Bone Jt. Surg. Br. 1987, 69, 215–219. [Google Scholar] [CrossRef] [Green Version]
- Bain, G.; Polites, N.; Higgs, B.; Heptinstall, R.; McGrath, A. The functional range of motion of the finger joints. J. Hand Surg. Am. 2015, 40, 406–411. [Google Scholar] [CrossRef]
- Darling, W.G.; Cole, K.J. Muscle activation patterns and kinetics of human index finger movements. J. Neurophysiol. 1990, 63, 1098–1108. [Google Scholar] [CrossRef]
- Cole, K.J.; Abbs, J.H. Coordination of three-joint digit movements for rapid finger-thumb grasp. J. Neurophysiol. 1986, 55, 1407–1423. [Google Scholar] [CrossRef] [Green Version]
- Valdes, K.; Boyd, J.D.; Povlak, S.B.; Szelwach, M.A. Efficacy of orthotic devices for increased active proximal interphalangeal extension joint range of motion: A systematic review. J. Hand Ther. 2019, 32, 184–193. [Google Scholar] [CrossRef] [PubMed]
- Arbuckle, J.; McGrouther, D. Measurement of the arc of digital flexion and joint movement ranges. J. Hand Surg. Eur. Vol. 1995, 20, 836–840. [Google Scholar] [CrossRef]
- Gülke, J.; Gulkin, D.; Wachter, N.; Knöferl, M.; Bartl, C.; Mentzel, M. Dynamic aspects during the cylinder grip-flexion sequence of the finger joints analyzed using a sensor glove. J. Hand Surg. Eur. Vol. 2013, 38, 178–182. [Google Scholar] [CrossRef] [PubMed]
- Sancho-Bru, J.; Perez-Gonzalez, A.; Vergara-Monedero, M.; Giurintano, D. A 3-D dynamic model of human finger for studying free movements. J. Biomech. 2001, 34, 1491–1500. [Google Scholar] [CrossRef] [PubMed]
- Nimbarte, A.D.; Kaz, R.; Li, Z.-M. Finger joint motion generated by individual extrinsic muscles: A cadaveric study. J. Orthop. Surg. Res. 2008, 3, 27. [Google Scholar] [CrossRef] [Green Version]
- Brook, N.; Mizrahi, J.; Shoham, M.; Dayan, J. A biomechanical model of index finger dynamics. Med. Eng. Phys. 1995, 17, 54–63. [Google Scholar] [CrossRef] [PubMed]
- Dell, P.C.; Sforzo, C.R. Ulnar intrinsic anatomy and dysfunction. J. Hand Ther. 2005, 18, 198–207. [Google Scholar] [CrossRef]
- Hoyet, L.; Ryall, K.; McDonnell, R.; O’Sullivan, C. Sleight of hand: Perception of finger motion from reduced marker sets. In Proceedings of the the ACM SIGGRAPH symposium on interactive 3D graphics and games, Costa Mesa, CA, USA, 9–11 March 2012; pp. 79–86. [Google Scholar]
- Hahn, P.; Krimmer, H.; Hradetzky, A.; Lanz, U. Quantitative analysis of the linkage between the interphalangeal joints of the index finger: An in vivo study. J. Hand Surg. Am. 1995, 20, 696–699. [Google Scholar] [CrossRef]
- Roda-Sales, A.; Sancho-Bru, J.L.; Vergara, M. Studying kinematic linkage of finger joints: Estimation of kinematics of distal interphalangeal joints during manipulation. PeerJ 2022, 10, e14051. [Google Scholar] [CrossRef]
- Yang, T.-H.; Lu, S.-C.; Lin, W.-J.; Zhao, K.; Zhao, C.; An, K.-N.; Jou, I.-M.; Lee, P.-Y.; Kuo, L.-C.; Su, F.-C. Assessing finger joint biomechanics by applying equal force to flexor tendons in vitro using a novel simultaneous approach. PLoS ONE 2016, 11, e0160301. [Google Scholar] [CrossRef] [Green Version]
- Valero-Cuevas, F.J. An integrative approach to the biomechanical function and neuromuscular control of the fingers. J. Biomech. 2005, 38, 673–684. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.-M.; Tang, J. Coordination of thumb joints during opposition. J. Biomech. 2007, 40, 502–510. [Google Scholar] [CrossRef]
- Rockwell, W.B.; Butler, P.N.; Byrne, B.A. Extensor tendon: Anatomy, injury, and reconstruction. Plast. Reconstr. Surg. 2000, 106, 1592–1603. [Google Scholar] [CrossRef] [PubMed]
- Jarque-Bou, N.J.; Scano, A.; Atzori, M.; Müller, H. Kinematic synergies of hand grasps: A comprehensive study on a large publicly available dataset. J. Neuroeng. Rehabil. 2019, 16, 63. [Google Scholar] [CrossRef] [PubMed]
- Billard, A.; Kragic, D. Trends and challenges in robot manipulation. Science 2019, 364, eaat8414. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Zhang, Y. Mapping human hand motion to dexterous robotic hand. In Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 15–18 December 2007; pp. 829–834. [Google Scholar]
- Lin, Y.; Sun, Y. Robot grasp planning based on demonstrated grasp strategies. Int. J. Robot. Res. 2015, 34, 26–42. [Google Scholar] [CrossRef]
- Grosskopf, A.; Kuhtz-Buschbeck, J.P. Grasping with the left and right hand: A kinematic study. Exp. Brain Res. 2006, 168, 230–240. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | DIP | PIP | MCP |
|---|---|---|---|
| F | 4.904 | 2.065 | 0.373 |
| p-value | 0.003 | 0.111 | 0.773 |
| Joint | DIP | PIP | MCP | |
|---|---|---|---|---|
| Peak flexion velocity | F | 1.645 | 1.434 | 0.423 |
| p-value | 0.185 | 0.239 | 0.737 | |
| Peak extension velocity | F | 1.150 | 0.727 | 1.576 |
| p-value | 0.334 | 0.539 | 0.201 | |
| Joint | Thumb | Long Fingers | |||
|---|---|---|---|---|---|
| IP | MCP | DIP | PIP | MCP | |
| Peak flexion velocity (°/s) | 737.72 ± 196.48 | 374.51 ± 153.94 | 1110.37 ± 255.91 | 1393.99 ± 296.77 | 1260.49 ± 332.57 |
| Peak extension velocity (°/s) | 752.26 ± 191.66 | 335.56 ± 104.16 | 1144.39 ± 221.80 | 1368.30 ± 294.90 | 1269.66 ± 243.50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Wen, R.; Duanmu, D.; Huang, W.; Wan, K.; Hu, Y. Finger Kinematics during Human Hand Grip and Release. Biomimetics 2023, 8, 244. https://doi.org/10.3390/biomimetics8020244
Li X, Wen R, Duanmu D, Huang W, Wan K, Hu Y. Finger Kinematics during Human Hand Grip and Release. Biomimetics. 2023; 8(2):244. https://doi.org/10.3390/biomimetics8020244
Chicago/Turabian StyleLi, Xiaodong, Rongwei Wen, Dehao Duanmu, Wei Huang, Kinto Wan, and Yong Hu. 2023. "Finger Kinematics during Human Hand Grip and Release" Biomimetics 8, no. 2: 244. https://doi.org/10.3390/biomimetics8020244
APA StyleLi, X., Wen, R., Duanmu, D., Huang, W., Wan, K., & Hu, Y. (2023). Finger Kinematics during Human Hand Grip and Release. Biomimetics, 8(2), 244. https://doi.org/10.3390/biomimetics8020244