1. Introduction
There are a large number of optimization problems in the fields of mathematics and engineering, and these problems must be solved in a short time with highly complex constraints. However, some studies showed that such traditional methods fall into local optima when solving high-dimensional, multimodal, nondifferentiable, and discontinuous problems, resulting in low solution efficiency [
1]. Compared with traditional methods, the metaheuristic algorithm has the characteristics of fewer parameters and no gradient information, so it can usually perform very well on such problems [
2].
The Mayfly Optimization Algorithm (MOA) [
3], proposed by Konstantinos Zervoudakis and Stelios Tsafarakis in 2020, is a metaheuristic algorithm inspired by the mating behavior of mayfly populations. Since it combines the main advantages of the particle swarm algorithm, genetic algorithm, and firefly algorithm, many researchers improved it and applied it to various scenarios. For example, Zhao et al. [
4] presented a chaos-based mayfly algorithm with opposition-based learning and Lévy flight for numerical and engineering design problems. Zhou et al. [
5] used orthogonal learning as well as chaotic strategies to improve the diversity of the MOA. Li et al. [
6] proposed an IMA with chaotic initialization, the gravity coefficient, and a mutation strategy and applied it to the dynamic economic environment scheduling problem. Zhang et al. [
7] combined the Sparrow Search Algorithm (SSA) with the MOA and applied it to the RFID network planning problem. Muhammad et al. [
8] combined the MPA with the MOA and applied it to the maximum power tracking scenario in photovoltaic systems.
Based on the above, it can be found that using some strategies to optimize the MOA or combining other metaheuristic algorithms with the MOA can effectively improve the performance of the algorithm. However, although the above variants of the MOA improve the optimization ability of the MOA to varying degrees, they may present challenges when solving some non-convex optimization problems. Therefore, it is still necessary to find additional algorithms or methods to combine with the MOA to optimize it.
The Aquila Optimizer (AO), proposed by Abualigah et al. [
9] in 2021, is a novel SIA that simulates the predation process of Aquila. Due to the variety of search methods for the AO, it received extensive attention from researchers. Mahajan et al. [
10] combined the Arithmetic Optimization Algorithm (AOA) with the AO and applied it to the global optimization task. Ma et al. [
11] combined GWO with the AO to construct a new hybrid algorithm. Ekinci et al. [
12] proposed an enhanced AO as an effective control design method for automatic voltage regulators. Liu et al. [
13] combined the WOA with the AO and applied it to the Cox proportional hazards model. From these studies, we find that the AO, as a metaheuristic algorithm that combines multiple optimization strategies, is mostly used by researchers in combination with other algorithms to optimize the performance of the other algorithms.
The opposition-based learning (OBL) strategy was proposed by Tizhoosh et al. [
14]. Since the solution after OBL has a higher probability of being closer to the global optimal solution than the solution without OBL [
15], it is often used by researchers to optimize the metaheuristic algorithm. For example, Zeng et al. [
16] optimized the wild horse optimizer algorithm with OBL and applied the algorithm to the HWSN coverage problem. Muhammad et al. [
17] combined OBL with teaching–learning-based optimization. Jia et al. [
18] hybridized OBL with the Reptile Search Algorithm. Sarada et al. [
19] mixed OBL with the Golden Jackal Optimization algorithm to optimize it. In these studies, OBL turned out to be effective at optimizing algorithms.
The no free lunch (NFL) [
20] theorem states that no one optimization method can solve all optimization problems, and the MOA was shown to degrade the quality of the final solution owing to premature convergence [
21]. Therefore, to enhance the global optimization ability of the MOA, we propose an MOA that combines the AO and the opposition-based learning (OBL) strategy, namely, AOBLMOA. The proposed algorithm integrates the search strategies in the AO into the position update process of male and female mayflies in the MOA, without increasing the time complexity, and adopts the OBL strategy for the offspring mayfly population to further optimize the offspring population. We also apply the hybrid algorithm to benchmark functions, CEC2017 numerical optimization problems, and CEC2020 real-world constrained optimization problems to show the feasibility of the proposed hybrid algorithm in optimization problems.
The organizational structure of this paper is as follows:
Section 2 briefly describes the basic MOA, the AO, OBL, and other popular metaheuristic algorithms;
Section 3 introduces the specific content of the proposed hybrid algorithm in detail;
Section 4 analyzes the performance of AOBLMOA on benchmark functions, CEC2017 numerical optimization problems, and CEC2020 real-world constrained optimization problems;
Section 5 summarizes the full text and looks forward to future work. The MATLAB codes of AOBLMOA are available at
https://github.com/SheldonYnuup/AOBLMOA (accessed on 1 August 2023).
2. Background Overview
2.1. Popular Metaheuristic Algorithms
Metaheuristic algorithms (MHs) can generally be divided into four categories: Swarm Intelligence Algorithms (SIAs), Evolutionary Algorithms (EAs), Physics-based Algorithms (PhAs), and Human-based Algorithms (HAs).
SIAs mainly simulate various group behaviors of diverse organisms, including foraging, attacking, mating, and other behaviors. Such algorithms include Particle Swarm Optimization (PSO) [
22], the Salp Search Algorithm (SSA) [
23], Gray Wolf Optimization (GWO) [
24], the Monarch Butterfly Optimizer (MBO) [
25], the Bald Eagle Search Optimization Algorithm (BES) [
26], the Marine Predator Algorithm (MPA) [
27], the Whale Optimization Algorithm (WOA) [
28], the Moth Search Algorithm (MS) [
29], etc.
EAs mainly simulate the evolutionary process in nature, and the most classic algorithm is the Genetic Algorithm (GA) [
30]. In recent years, with the in-depth study of EAs, researchers have successively proposed Differential Evolution (DE) [
31], Biogeography-Based Optimization (BBO) [
32], Cuckoo Search (CS) [
33], and so on.
PhAs are mainly inspired by the laws of physics, including Multi-Verse Optimization (MVO) [
34], Equilibrium Optimization (EO) [
35], the Gravity Search Algorithm (GSA) [
36], the Lightning Search Algorithm (LSA) [
37], the Archimedes Optimization Algorithm (AOA) [
38], and so on.
HAs simulate human social behavior. Existing HAs include teaching–earning-based optimization (TLBO) [
39], the Human Felicity Algorithm (HFA) [
40], Political Optimization (PO) [
41], etc.
Table 1 provides an overview of the mentioned metaheuristic algorithms.
2.2. Mayfly Optimization Algorithm (MOA)
The working principle of the mayfly algorithm is as follows: at the initial stage of the algorithm, male and female mayfly populations are randomly generated in the problem space. Each individual mayfly in the two populations represents a candidate solution in the problem space, which can be expressed by the -dimensional variable . Additionally, the performance of each individual mayfly is calculated by the objective function . The velocity of each individual ephemera is represented by , which is used to represent the change in position of each individual mayfly in each iteration. The movement direction of each individual mayfly is affected by both the individual optimal position and the global optimal position . That is, each individual mayfly adjusts its flight path to adapt to the individual optimal position and the global optimal position before the current iteration.
2.2.1. Movement of Male Mayflies
Male mayfly groups tend to gather in the center of the group in space, which means that each individual male adjusts its position based on its own experience and the experience of its neighbors.
represents the position of individual
in dimension
at the
iteration, and
represents the velocity of individual
in dimension
at the
iteration. The movement of the male mayfly individual’s position
is shown in Equation (1):
When the fitness of male mayflies is worse than the global optimal fitness, then male mayflies approach the individual optimal position and the global optimal position. In contrast, if the individual fitness of male mayflies is better than the global optimal fitness, then male mayflies perform courtship dance behaviors above the water surface to attract mates. Based on this, it should be assumed that although the male mayflies can continue to move, they cannot quickly gain speed. Taking the minimization problem as an example, the variation in the speed
of the male mayfly is shown in Equation (2):
where
represents the objective function, which is used to evaluate the performance of the solution;
represents the velocity of individual
in dimension
at the
-th iteration;
represents the position of individual
in dimension
at the
-th iteration;
and
represent the individual optimal attraction coefficient and the population optimal attraction coefficient, respectively;
represents the visibility coefficient, which is used to limit the visible range of individuals;
is the mating dance coefficient, which is used to attract the opposite sex to keep approaching;
is a random coefficient, which is valued in the range of [−1, 1]; and
represents the gravity coefficient, which is used to maintain the velocity of the individual in the previous iteration, and its expression is shown as
where
and
represent the maximum and minimum values of the gravity coefficient, respectively;
indicates the maximum number of iterations of the algorithm, and
indicates the current number of iterations of the algorithm.
and
in Equation (2) represent the Cartesian distance between
and
and
, respectively. The Cartesian distance calculation formula is shown in Equation (4):
where
represents the individual position of male mayfly individual
in dimension
;
indicates the position of
or
; and
is the individual optimal position of mayfly individual
in dimension
. Taking the minimization problem as an example, the updated formula of the individual optimal position at the
iteration is shown in Equation (5):
where
is the optimal position of the group in the
dimension, and its updated formula is shown in Equation (6):
where
represents the number of individuals in the male mayfly population.
2.2.2. Movement of Female Mayflies
The most striking difference between female mayflies and male mayflies is that females do not congregate in large groups. Instead, they mate by flying to males. Suppose
represents the position of individual
in dimension
at iteration
, and the position update formula of the female mayfly at iteration
is shown in Equation (7):
Although the process of the mutual attraction of mayflies is stochastic, this stochastic process can also be modeled as a deterministic process, that is, according to the mayflies’ fitness. For example, the female mayfly with the best fitness should be attracted by the male mayfly with the best fitness, and the female mayfly with the second-best fitness should be attracted by the male mayfly with the second-best fitness. By analogy, when the fitness of the female mayfly is inferior to that of the corresponding male mayfly, the female mayfly is attracted by the corresponding male mayfly and approaches it; otherwise, the female mayfly randomly moves. Therefore, taking the minimization problem as an example, the velocity update formula of the female mayfly is shown in Equation (8):
where
represents the velocity of individual
in dimension
at the
-th iteration.
is the attraction coefficient between the male and female mayflies.
represents the visibility coefficient.
represents the Cartesian distance between the female mayfly and the male mayfly calculated by Equation (3).
represents the random walk coefficient.
represents a random coefficient, taking values in the range [−1, 1].
2.2.3. Mating of Male and Female Mayflies
The mating process of the two sexes of mayflies is represented by a crossover operator, and the survival of the fittest mechanism is used to select a male parent from the male mayfly population and a female parent and the female mayfly population for mating. That is, the male mayfly with the best fitness mates with the female mayfly with the best fitness, the male mayfly with the second-best fitness mates with the female mayfly with the second-best fitness, and so on. Before the end of each iteration, the male mayfly population, the female mayfly population, and the offspring mayfly population are merged into two populations, and then the individuals with the poorest fitness in the two merged populations is eliminated. The individuals with better fitness in the two merged populations enter the next iteration as the new male mayfly population and female mayfly population, respectively. The expressions of the offspring produced after mating are shown in Equations (9) and (10):
where
and
represent the male parent and female parent, respectively;
represents a random value that conforms to a specific range; and the initial velocity of the offspring is set to zero.
2.2.4. Mutation of Offspring Mayflies
To solve the problem that the algorithm may fall into a local optimum, the mutation operation is performed on the offspring mayflies, and, by adding random numbers that obey the normal distribution, the offspring mayflies can explore new areas that may not have been explored in the problem space. Among them, the number of mutant individuals is approximately 0.05 times that of the male mayflies. The expression of the offspring gene mutation is shown in Equation (11):
where
represents the standard deviation of the normal distribution.
represents a standard normal distribution with a mean of 0 and a variance of 1.
2.3. Aquila Optimizer (AO)
The AO simulates Aquila’s hunting behavior and optimizes the problem through its various methods in the hunting process. These methods include the high soar with vertical stoop, contour flight with short glide attack, low flight with slow descent attack, and diving to walk and grab prey. At the same time, the AO decides whether to use the exploration method or the exploitation method by judging the number of iterations. When the current iteration number is within 2/3 times the total iteration number, the explore method is fired; otherwise, the exploit method is used. The specific mathematical model of the method adopted by the AO is as follows:
2.3.1. High Soar with Vertical Stoop (Expanded Exploration)
In this method, Aquila first identifies the location of the prey and selects the best prey area by the high soar with vertical stoop method. In this process, Aquila swoops from various locations within the problem space to ensure a wide area for the search space. The method can be represented as
where
is used to control the expanded search process by judging the number of iterations.
represents the current iteration number.
represents the maximum number of iterations.
represents a random value in the interval (0, 1).
represents the average value of the individual x position as of the
-th iteration, which can be expressed as
where
represents the population size, and
represents the dimension of the problem to be solved.
2.3.2. Contour Flight with Short Glide Attack (Narrowed Exploration)
The contour flight with short glide attack method mainly simulates the behavior of Aquila hovering above the target prey, preparing to land, and attacking after finding the target prey at high altitude. In this method, the algorithm more precisely explores the area where the target prey is located and prepares for the next attack. The simulation method can be mathematically expressed as
where
represents a random solution obtained in the population at the
-th iteration,
represents the problem dimension,
is the Lévy flight distribution function, and its calculation formula can be shown as
where
is a constant value with a value of 0.01,
and
are both random numbers with a value in the (0, 1) interval,
is a constant value with a value of 1.5, and the calculation formula of
is
and
in Equation (14) are used to represent the spiral search method in the search process, and its calculation formula can be shown as
where
where
takes a value according to the number of search cycles in the interval [1, 20],
is a constant value with a value of 0.00565,
is an integer value determined according to the dimension of the problem search space, and
is a constant with a value of 0.005.
2.3.3. Low Flight with Slow Descent Attack (Expanded Exploitation)
When the location of the prey is locked, Aquila needs to be ready to land and attack the prey. Therefore, Aquila tests the reaction of the prey by making an initial dive. In this method, the algorithm makes Aquila approach the prey and attack by exploiting the area where the target is located, which can be mathematically expressed as
where both
and
are development adjustment parameters and take values in the interval (0, 1).
and
denote the lower bound and upper bound of a given problem, respectively.
2.3.4. Walk and Grab Prey (Narrowed Exploitation)
When Aquila is close to the prey, it lands and attacks the prey according to the movement of the prey. This is Aquila’s final attack on the prey’s final location, and the method can be expressed as
where
represents the quality function used to balance the search strategy, and its calculation formula is shown in Equation (24).
is used to represent the various actions that Aquila makes when tracking the escaping prey, which can be calculated by Equation (25). The decreasing value of
from 2 to 0 during the iterative process represents the flight slope of Aquila tracking the prey when the prey is escaping, and this parameter is expressed by Equation (26).
2.4. Opposition-Based Learning (OBL)
The opposition-based learning strategy mainly compares the fitness of the current solution and its opposite solution and selects the better of the two to enter the next stage. As OBL is widely applied to the optimization of metaheuristic algorithms, researchers successively proposed variants of OBL, such as quasi OBL [
42], binary student OBL [
43], and specular reflection learning [
44]. Basic OBL is defined as follows:
Definition 1. Opposite numbers. When is a real number, and ,
the opposite number is shown as Definition 2. Opposite points. When point is a point in -dimensional coordinates, are real numbers, and ;
the coordinates in the opposite point can be shown as 3. Proposed Hybrid Algorithm (AOBLMOA)
The proposed hybrid algorithm (AOBLMOA) is based on the mayfly algorithm, which preserves the position movement method when the fitness of the male mayfly is better than the global optimal fitness method, the position movement method when the fitness of the female mayfly is better than the fitness of the corresponding male mayfly, and the mating method of the male and female mayflies to produce offspring. Then, the mating dance of the male mayflies and the random walk of the female mayflies were replaced with the method adopted in the AO, and the genetic mutation behavior of the offspring mayflies was replaced with reverse learning behavior.
3.1. Movement of Male Mayflies
Since female mayflies move toward male mayflies, and the birth of their offspring is also directly influenced by male mayflies, it is crucial to increase the search efficiency of male mayflies. In the process of moving the position of the male mayfly, if the fitness of the male mayfly is equal to or worse than the global optimal fitness, it means that its optimization effect in the last iteration process is not good, and it has not reached a better position than the global optimal individual mayfly. In this situation, the algorithm should make the male mayfly approach the global optimal mayfly and look for a better position in the process. The basic MOA uses the mating dance behavior to move the male mayfly at this stage. However, in real experiments, the optimization of mating dance behavior is not particularly effective.
In the AO, when
, the algorithm lies in the exploration phase, and, when
, the algorithm is in the exploitation phase. The contour flight with the short glide attack and walk and grab prey methods in the AO are the narrow search method in the algorithm exploration process and the narrow search method in the exploitation process, respectively, both of which allow Aquila to more directly rush to the prey. This takes place under the same requirement that male mayflies are equal to or worse than the global optimal solution in the MOA. Therefore, we introduce the contour flight with short glide attack method and the walk and grab prey method in the AO to replace the mating dance method in the original algorithm, to promote the male mayfly to approach the global optimal mayfly. The improved mathematical model of the movement process of the male mayfly population is as follows:
3.2. Movement of Female Mayflies
In the basic MOA, when the fitness of the female mayfly is worse than that of the corresponding male mayfly, the female mayfly is attracted by the male mayfly and moves to the position of the male mayfly. When the fitness of individual female mayflies is better than that of their male counterparts, the female randomly walks because it is not attracted. Although the random walk behavior helps the female mayfly to expand the search range to a certain extent and prevents it from falling into a local optimum, in actual experiments, this method does not have a benefit effect on the optimization of the function. We believe that female mayflies, as an attracted population, should be attracted to the globally optimal individual and move according to the globally optimal position if the individual cannot be attracted to the corresponding male.
The high soar with vertical stoop method and the low flight with slow descent attack method in the AO are an expanded method in the exploration process and an expanded method in the exploitation process, respectively. Both methods are employed in the AO to expand the search range of Aquila. This not only has a similar effect as the random walk behavior performed by female mayflies but also more closely fits with the view that female mayflies are attracted to the global optimal individual when they are not attracted by male mayflies. Therefore, the improved mathematical model of the female mayfly’s positional movement process is as follows:
3.3. Stochastic OBL of Offspring Mayflies
Although OBL can perform well for most functions, for symmetric functions, the feasible solution without OBL has the same fitness as the opposite solution using OBL, which leads to the poor optimization effect of OBL in this kind of function and problem. To solve this problem, we introduce stochastic OBL, which applies a random perturbation on the basis of the OBL strategy to increase its randomness. The stochastic OBL strategy is defined as follows:
Definition 3. Stochastic opposite point. On the basis of the opposite point, take a random perturbation to :
where represents a random value in the (0,1) interval that conforms to a Gaussian distribution. Introducing the stochastic OBL into the process of optimizing the offspring mayfly certainly helps to improve the performance of the algorithm by diversifying the offspring population. However, if this method is directly used on the offspring mayfly on the basis of the original algorithm, the overall efficiency of the algorithm decreases due to the increase in the time complexity. Therefore, we replace the original genetic mutation behavior of offspring mayflies with the stochastic OBL, which enables the embedding of the strategy in the algorithm without affecting the time complexity. The process of optimizing offspring mayflies using stochastic optimization is as follows:
where
represents the individual optimized using the stochastic OBL strategy, and
represents the individual not optimized using the stochastic OBL strategy.
3.4. Sensitivity Analysis
The parametric sensitivity analysis method of Xu et al. [
45] is applied to AOBLMOA. Based on this, the weight minimization of a speed reducer problem in CEC2020RW problems is selected in this section for the sensitivity analysis of five core parameters in AOBLMOA:
,
,
,
, and
. The details of the selected problem are shown in
Section 4.3.1. And the ranges of parameters are
,
,
,
, and
. The problem size is set to 7, and the number of iterations is set to 10,000. The average value obtained after 25 independent runs of the algorithm with different parameter combinations is shown in
Table 2.
From
Table 2, we can see that AOBLMOA obtains the best function value in Scenario 32, that is,
,
,
,
, and
. Therefore, in the subsequent experiments, we set the parameters to be the same as those of Scenario 32.
3.5. Pseudocode of AOBLMOA
The pseudo-code for AOBLMOA is shown in Algorithm 1.
| Algorithm 1: Pseudo-code of AOBLMOA |
Input the Initialization parameters of AOBLMOA Objective function f(), = Initialize the male mayfly population (i = 1,2,…,N) Initialize the male mayfly velocities Initialize the female mayfly population (i = 1,2,…,N) Initialize the female mayfly velocities Evaluate solutions Find global best while do for each female do if then Update the using Equation (8) Update the location vector using Equation (7) else if then Update the location vector using Equation (14) else if then Update the location vector using Equation (23) end if end for for each male do if then Update the using Equation (2) Update the location vector using Equation (1) else if then Update the location vector using Equation (12) else if then Update the location vector using Equation (22) end if end for Generate the offspring mayfly population using Equations (9) and (10) for each offspring do Calculate the opposite solution using Equation (31) Update the location vector using Equation (32) end for return gbest end while
Output the Global optimal solution gbest |
4. Experimental Results and Analysis
To demonstrate AOBLMOA’s effectiveness, stability, and excellence, we first test it using 19 benchmark functions. The basic MOA and basic AO are compared with PSO, GA, GWO, the SSA, SCA, and other traditional or state-of-art metaheuristic algorithms in the classical benchmark function, and the comparison results show that the two algorithms are superior to these traditional algorithms. Based on this, we compare AOBLMOA with the basic MOA, the basic AO, AMOA combining the MOA and the AO, OBLMOA combining the MOA and the OBL strategy, and OBLAO combining the AO and the OBL strategy to prove that AOBLMOA not only outperforms classical metaheuristic algorithms but also is the optimal algorithm among the multiple algorithm combinations used in this paper. Not only that, we use CEC2017 bound constrained numerical optimization problems to compare AOBLMOA with the state-of-the-art algorithm to prove that AOBLMOA can not only be applied in numerical optimization problems but also has advantages compared with other state-of-the-art algorithms. Finally, we apply AOBLMOA to CEC2020 real-world constraint optimization problems and compare it with the three top-performing algorithms in this competition to prove that AOBLMOA is equally applicable in real-world engineering problems.
In the CEC2017BC test suite, the state-of-the-art algorithms compared with AOBLMOA are the Reptile Search Algorithm (RSA) [
46], the Annealed Locust Algorithm (SGOA) [
47], the Multi-Strategy Enhanced Salmon Optimization Algorithm (ESSA) [
48], the improved Moth-to-Flame Algorithm (LGCMFO) [
49] and the Chaos-Based Mayfly Algorithm (COLMA) [
4]. The data used in the comparison are all taken from the data disclosed in the papers of each algorithm. In the CEC2020RW test suite, the introduced comparison algorithms include Self-Adaptive Spherical Search (SASS) [
50], the Modified Matrix Adaptation Evolution Strategy (sCMAgES) [
51], and COLSHADE [
52].
The experiments are conducted using a computer Core i7-1165G7 with 16 GB RAM and 64-bit for Microsoft Windows 11. The source code is implemented using MATLAB (R2021b).
4.1. Benchmark Function
We use 19 benchmark functions to test the abilities of AOBLMOA to search for the global optimal solution in the problem space and to jump out of local optimal solutions and to prove the superiority of AOBLMOA compared to the original MOA, the AO, and variant algorithms. The 19 benchmark functions include the unimodal function (
–
) used to test the global search ability of the algorithm, the multimodal function (
–
) used to test the local search ability of the algorithm in more complex cases and the ability to escape the local optimum, and the fixed-dimension function (
–
) used to test the exploration ability of the algorithm in low-dimensional space. To evaluate the development ability of AOBLMOA in different problem dimensions, we set the problem dimensions of the unimodal and multimodal functions to 10, 30, 50, and 100 dimensions and analyzed the results in different dimensions. As we found in the literature [
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40,
41], the number of iterations of each algorithm for each function is 200–100,000, and the population is 20–50. Therefore, to ensure the stability of the algorithm, each algorithm independently runs 30 times for each function, and the maximum number of iterations each time is 1000. The mathematical expression of each benchmark function is shown in
Table 3.
4.1.1. Convergence Analysis
Convergence analysis is the most basic step in the process of analyzing an algorithm. In this section, to verify the performance of AOBLMOA, we analyze its convergence behavior in the iterative process through a visualization method.
Figure 1 lists the 2D image of the benchmark function (column 1), the search history of the algorithm in the problem space (column 2), the convergence trajectory of the algorithm (column 3), the change in the average fitness value (column 4), and the convergence curve (column 5).
The search history in the second column of
Figure 1 shows the position distribution of the search factor in AOBLMOA for each iteration of the different functions. For the unimodal function, most of the search factors converge so close to the optimal point that the points in the scatter plot look sparse. For the multimodal function and the fixed-dimension function, the search factors of AOBLMOA in
,
,
,
,
,
,
, and
can be searched around the optimal point, while, in
,
,
,
,
,
, and
, we can see that although the search factor falls into the local optimum in the search process once, it is not affected by the local optimum and can jump out of the local optimum and develop around the optimum. The third column shows the trajectory of the male mayfly population in the first dimension of each problem. From the trajectory, it can be seen that AOBLMOA has a higher oscillation frequency in the early iteration process, indicating its strong exploration ability in the early iteration, while a lower oscillation range in the late iteration indicates that the algorithm has a strong development ability in the late iteration.
Not only that, but, from the changes in the average fitness value of the solutions in the fourth column, we can find that most of the solutions have relatively high fitness values at the beginning of the iteration. However, within 20 iterations, the average fitness value of the solution can reach a very low interval, which shows that AOBLMOA can converge to the region of the optimal solution in fewer iterations. Similarly, we can see from the convergence curve of the algorithm in the fifth column that, since the unimodal function has only one optimal point, and the convergence process is relatively simple, the convergence curve of the algorithm for the unimodal function is relatively smooth; since the multimodal function may have multiple optimal points, and its convergence process is complicated, it may be necessary to find the global optimal point by jumping out of the local optimum. Therefore, the convergence curve of AOBLMOA for the multimodal function is similar to the stepwise convergence curve; even so, AOBLMOA finds the global optimal point in both and within single-digit iterations. For fixed-dimension functions, AOBLMOA can also find the global optimum within very few iterations.
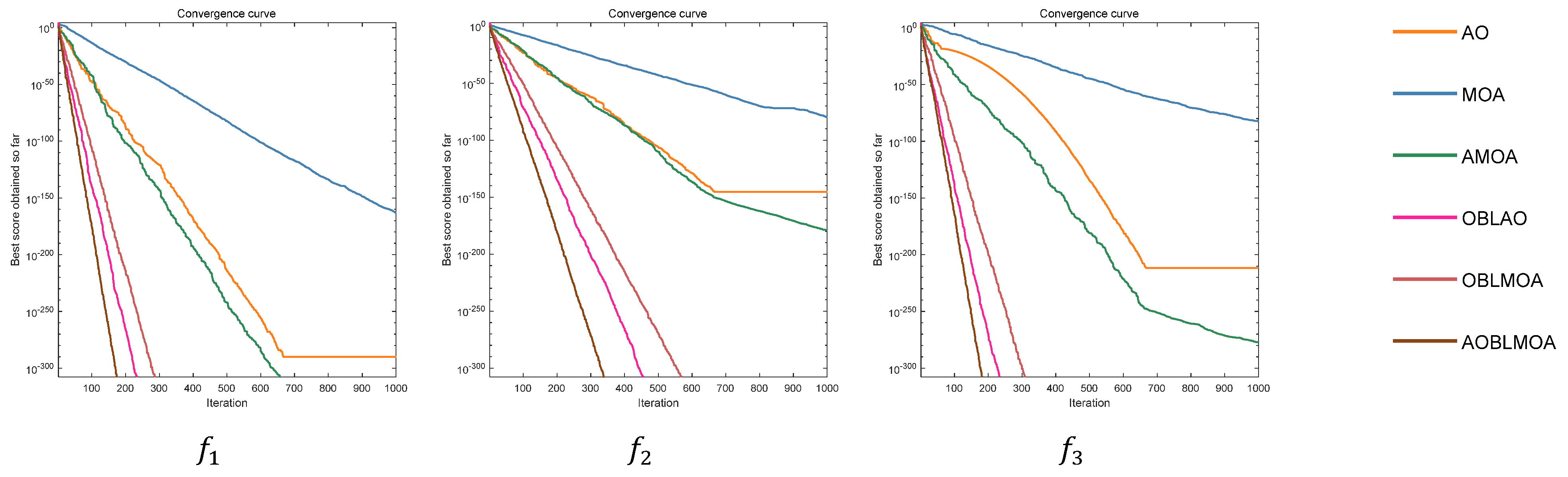
To further analyze the convergence of AOBLMOA, we compare the convergence curves of the MOA, the AO, AMOA, OBLMOA, OBLAO, and AOBLMOA in the same graph. The parameter settings of each algorithm are shown in
Table 4.
Figure 2 is a comparison of the convergence curves of multiple algorithms for different functions, covering the optimal solution of each algorithm at each iteration number. We compare the MOA, the AO, and AMOA without the OBL strategy with the OBLMOA, OBLAO, and AOBLMOA with the OBL strategy and find that the algorithms that adopted the OBL strategy show a more obvious decay rate for the three functions, especially for
–
. We find that the AO easily falls into a local optimum for these functions, and OBLAO with the OBL strategy has a faster convergence speed than the basic AO, which shows that the OBL strategy helps the algorithm with iterative convergence in time. At the same time, to confirm that the fusion of the AO and the MOA is helpful to the convergence of the algorithm, we compare the AO, the MOA, and AMOA as well as OBLAO, OBLMOA, and AOBLMOA. From the figure, we find that AMOA adopting the fusion strategy has a faster convergence speed than the AO and the MOA for most functions. Similarly, AOBLMOA has better convergence than OBLAO and OBLMOA. This shows that the fusion of the AO and the MOA also helps to improve the convergence of the algorithm. Finally, comparing AOBLMOA with other algorithms, it is found that the proposed AOBLMOA converges faster than the MOA and the AO and does not fall into a local optimum. Compared with other hybrid algorithms, AOBLMOA is also the one with the fastest convergence speed and can find the global optimum in only a small number of iterations.
4.1.2. Search Capability Analysis
The search capability analysis of the metaheuristic algorithm can be carried out by analyzing the development ability and the exploration ability of the algorithm.
Table 5 and
Table 6 show the calculation results of different algorithms for each benchmark function, including the best solution, median solution, worst solution, mean solution, and standard deviation after 30 independent runs, and the best results are shown in bold.
Since the unimodal function has only one global optimal solution, it is often used to test the exploitability of the algorithm. The optimization results of the unimodal function (
–
) in
Table 5 confirm the superiority of the proposed AOBLMOA exploitation performance because its best value, median value, worst value, and mean value for the unimodal function are superior to those of other algorithms, and all reach the theoretical optimal value of the function. Moreover, the minimum standard deviation obtained by AOBLMOA also proves its superior exploitation performance with high reliability.
The multimodal function for the benchmark function is often used to evaluate the exploration ability of the algorithm. We applied the high-dimensional multimodal function (
–
) and the fixed-dimension multimodal function (
–
) to test the ability of the algorithm.
Table 5 and
Table 6 list the best value, median value, worst value, mean value, and standard deviation of each algorithm for high-dimensional multimodal functions and fixed-dimension multimodal functions, respectively. The results show that AOBLMOA provides the minimum metric values fir all 15 multimodal functions and reaches the theoretical optimal values for all the other functions, except
,
,
, and
. This shows that AOBLMOA also has excellent exploration capabilities.
4.1.3. Stability Analysis
To evaluate the ability and stability of AOBLMOA when dealing with problems of different dimensions, we set the problem dimensions of the 10 functions,
, in
Table 3 to 30, 50, and 100 dimensions. AOBLMOA and other comparison algorithms are independently run 30 times for each function, and the number of iterations is set to 1000. As shown in
Table 7,
Table 8 and
Table 9, the excellent performance of each algorithm for each function is reflected in its best value, median value, worst value, average value, and standard deviation. Obviously, except that the best value and median of AOBLMOA in the 30-dimensional
are slightly lower than those of the AO and OBLAO, it achieves the best results compared with the other algorithms for all the indicators of each function in each dimension. At the same time, the proposed algorithm can jump out of multiple local optimal solutions for functions of different dimensions and accurately reach the global optimum after finding the effective global optimal search domain, which is enough to show that its search ability does not decline with the increase in the problem dimension.
4.1.4. Time Complexity Analysis
The time complexity can describe the efficiency of the algorithm operation. Zhou et al. [
5] analyzed the time complexity of the variant mayfly algorithm that they proposed, and we adopt the same idea to analyze and compare the time complexity of the MOA and AOBLMOA.
The time complexity of the basic MOA and AOBLMOA is mainly related to three parameters: the problem dimension (), population size (), and algorithm iteration number (). In a single iteration, the time complexity of each algorithm optimization process can be summarized as , . The detailed analysis of the time complexity of the algorithm is as follows:
In the basic MOA, the time complexity of the initial population is , the calculation cost of the process of mayfly position change is , the calculation amount of the mating of the mayflies is , and the calculation amount of the mutation of the offspring is . Therefore, the time complexity of the basic MOA is .
In AOBLMOA, the time complexity of the initial population is , the time complexity of the process of the mayfly position change adopted by combining AO is , the time complexity of the mating process of mayflies is , and the time consumption of the offspring mayflies in stochastic OBL processes is . Thus, the time complexity of AOBLMOA is .
To sum up, the time complexity of the MOA and AOBLMOA can be expressed as , which shows that AOBLMOA has no significant improvement in time complexity compared with the basic MOA.
At the same time, in order to confirm the accuracy of the time complexity analyses of the two algorithms, we list the calculation time of several algorithms fors
–
in
Table 5 and
Table 6. From these data, we can see that the calculation time of the MOA and AOBLMOA is similar, which proves that the time complexity of the two algorithms is basically the same.
4.1.5. Statistical Analysis
In the above analysis process, after the comprehensive consideration of the experimental results obtained after each algorithm is independently run 30 times for different functions, we conclude that the proposed AOBLMOA has superior convergence, search ability, and stability. To confirm the statistical validity of this conclusion, we use statistical methods to analyze the optimization results of each algorithm for each function. The adopted statistical methods include the Wilcoxon rank sum nonparametric statistical test [
53] and the Friedman statistics test.
The Wilcoxon rank sum nonparametric statistical test mainly judges whether there is a significant difference between two groups of data by comparing the
value. If
, it means that the two groups of data have a significant difference; otherwise, there is no significant difference. Based on this, we compare the optimization results of AOBLMOA for different functions with other algorithms. If
, there is a significant difference between AOBLMOA and the specific algorithm for the corresponding function; otherwise, there is no significant difference. The calculation results are shown in
Table 10, where “+/−/=“ indicates the number of results of “significant advantage/significant disadvantage/no significant difference” between the corresponding algorithm and AOBLMOA. In
Table 10, compared with other algorithms, AOBLMOA not only has no significant disadvantage but also has significant advantages for most functions.
The Friedman statistical test mainly judges the superiority of the algorithm by ranking the mean value in the data, and the lower the ranking value is, the more superior the algorithm is. The ranking formula is
where
represents the
-th function,
represents the
-th algorithm,
represents the number of test functions, and
represents the ranking of the
-th algorithm in the
-th function. The smaller the value of
is, the higher the ranking of the algorithm is, and the better the performance is.
From the Friedman ranking in
Table 11, we find that both the basic AO and the basic MOA are ranked in the last two positions for all algorithms, which shows that other hybrid algorithms are indeed optimized on the basis of the original algorithm. Not only that, the proposed AOBLMOA ranks first in all 49 functions, and its Friedman ranking and the final ranking are both first, which is enough to illustrate the strong performance of AOBLMOA compared with other algorithms.
Combining the two statistical analysis results, it can be seen that the conclusion that “AOBLMOA has superior convergence, search ability and stability compared with AO, MOA and other hybrid algorithms” is statistically valid.
4.2. CEC2017 Bound Constrained Numerical Optimization Problems
To demonstrate that the proposed AOBLMOA not only outperforms the original algorithms, the recently popular improved MOA, and the state-of-the-art algorithm but also can be applied to numerical optimization problems, we use a very challenging CEC2017BC function for testing. The CEC2017BC test functions include unimodal functions (
–
), multimodal functions (
–
), hybrid functions (
–
), and composite functions (
–
). The specific information is shown in
Table 12.
In this experiment, we compare AOBLMOA with several state-of-the-art algorithms, such as the MOA, the AO, LGCMFO, RSA, the ESSA, the SGOA, and COLMA. All algorithms are independently run 30 times, the maximum number of iterations is 1000, and the population size is set to 30.
Table 13 lists the average, standard deviation, Friedman ranking, and final ranking of each algorithm for each function. From the final ranking results in
Table 13, we can see that the performance of AOBLMOA for the CEC2017 function set is not only better than the MOA and the AO but also than the other state-of-the-art algorithms, and the final ranking is first. This shows that AOBLMOA is feasible and superior when applied to numerical optimization problems.
4.3. CEC2020 Real-World Constrained Optimization Problems
In order to verify the feasibility of the proposed AOBLMOA in engineering optimization problems, we use the CEC2020 real-world constrained optimization problems to test it and compare it with the three best-performing algorithms in the CEC2020 RW competition. The three algorithms are SASS, sCMAgES, and COLSHADE, and the running results of these three algorithms can be found in [
54]. We use a static penalty function approach to address the constraints of each problem. The standard deviation, mean value, median value, minimum value, and maximum value of each algorithm are compared after 25 independent runs for each problem. It is not difficult to see from the results in
Table 14,
Table 15,
Table 16,
Table 17,
Table 18,
Table 19,
Table 20,
Table 21,
Table 22 and
Table 23 that the proposed AOBLMOA is not inferior to the other three algorithms, which just shows that AOBLMOA is also feasible in real-world engineering problems.
4.3.1. Weight Minimization of a Speed Reducer (WMSR)
The WMSR problem mainly describes the design of a small aircraft engine reducer. The problem contains 11 constraints and seven design variables, and the mathematical model is as follows:
minimize
subject to
with bounds
4.3.2. Optimal Design of Industrial Refrigeration System (ODIRS)
The ODRIS problem is an optimization problem for an industrial refrigeration system. It contains 15 constraints and 14 design variables. Its specific mathematical model is as follows:
minimize
subject to
with bounds
4.3.3. Tension/Compression Spring Design (TCSD Case 1)
The TCSD1 problem is a relatively classic engineering optimization problem, and many metaheuristic algorithms use this problem to prove its feasibility in engineering optimization problems. The main objective of this problem is to optimize the weight of a tension or compression spring. It consists of 4 constraints and 3 design variables: wire diameter (), mean coil diameter (), and number of coils (). The mathematical model of the problem appears as follows:
minimize
subject to
with bounds
4.3.4. Multiple Disk Clutch Brake Design Problem (MDCBDP)
The MDCBDP problem is described by nine constraints and five integer decision variables, and its main purpose is to minimize the mass of the multiplate clutch brake. The decision variables for this problem include the inner radius (), outer radius (), disc thickness (), actuator force (), and number of friction surfaces (). Its mathematical model is as follows:
minimize
subject to
where
with bounds
4.3.5. Planetary Gear Train Design Optimization (PGTDO)
The main goal of PGTDO is to minimize the maximum error of the car transmission ratio by calculating the number of gear teeth in the automatic planetary transmission system. The mathematical model of the problem is shown below, with six integer variables and 11 constraints.
Minimize
where
subject to
with bounds
4.3.6. Hydro-Static Thrust-Bearing Design Problem (HTBDP)
The HTBDP problem is primarily about optimizing bearing power losses by using four design variables: oil viscosity, bearing radius, flow rate, and groove radius. In addition to the above four design variables, the problem also contains seven nonlinear constraints, and its mathematical model is as follows:
minimize
subject to
where
with bounds
4.3.7. Four-Stage Gear Box Problem (FGBP)
The FGBP aims at minimizing the weight of the gearbox and has 22 design variables, which are very discrete, including gear position, gear teeth number, blank thickness, etc. At the same time, the problem also has 86 nonlinear constraints. The comparison of the results of each algorithm in this problem is shown in
Table 20.
4.3.8. Gas Transmission Compressor Design (GTCD)
The GTCD problem contains four design variables and one constraint condition, which is used to optimize the design of the gas transmission compressor. Its mathematical model is as follows:
minimize
subject to
with bounds
4.3.9. Tension/Compression Spring Design (TCSD Case 2)
The TCSD2 problem is mainly used to optimize the volume required for manufacturing helical compression spring steel wire. This problem mainly includes three design variables, the outer diameter (), the number of spring coils () and the spring steel wire diameter (), and eight nonlinear constraints. Its mathematical model is as follows:
minimize
subject to
where
with bounds
4.3.10. Topology Optimization (TO)
The main purpose of this problem is to optimize the material layout for a given load set given the design search space and constraints related to system performance. The mathematical model is as follows:
minimize
subject to
with bounds
5. Conclusions and Future Directions
In this paper, we propose a metaheuristic algorithm that combines the MOA, the AO, and the OBL strategies, namely, AOBLMOA. The algorithm takes the MOA as the framework, assigns the search methods of Aquila in the AO to the male and female mayfly populations in the MOA, and replaces the mutation strategy of the offspring mayfly population with the stochastic OBL strategy. To verify the effectiveness, superiority, and feasibility of the proposed algorithm for different types of problems, we successively apply AOBLMOA to 19 benchmark functions, 30 CEC2017 functions, and 10 CEC2020 real-world constrained optimization problems. From the obtained results and statistical analysis results, it can be seen that the algorithm has a great improvement compared with the original algorithm, has advantages compared with the recently proposed algorithm, and is feasible in numerical optimization and practical engineering optimization problems. However, the algorithm is designed for continuous problems, not binary or discrete problems. Therefore, AOBLMOA cannot solve discrete problems such as the TSP problem and the VRP problem.
In future work, we suggest that researchers interested in AOBLMOA can further optimize it and even design a binary, discrete, or multi-objective AOBLMOA. It is also interesting to apply AOBLMOA to large-scale applications such as neural network optimization, workshop task scheduling, robot path planning, text and data mining, image segmentation, signal denoising, oil and gas pipeline network transportation, feature selection, etc. The MATLAB codes for AOBLMOA are available at
https://github.com/SheldonYnuup/AOBLMOA (accessed on 1 August 2023), to help researchers with further research.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}