
Assessment of the Suitability of Selected Linear Actuators for the Implementation of the Load-Adaptive Biological Principle of Redundant Motion Generation

 , , , , ,
, , , , , 
Abstract
:
1. Introduction
1.1. Motivation and State of the Art
1.2. Research Objective of This Paper
2. Materials and Methods
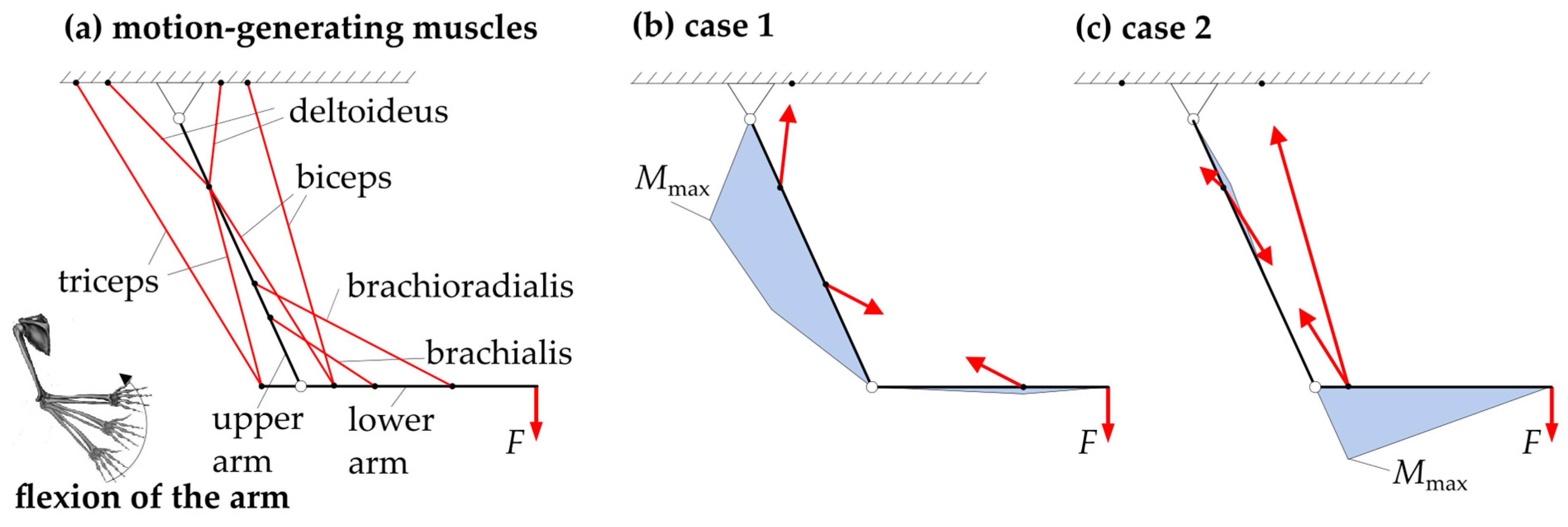
2.1. Choice of the Biomimetic Approach
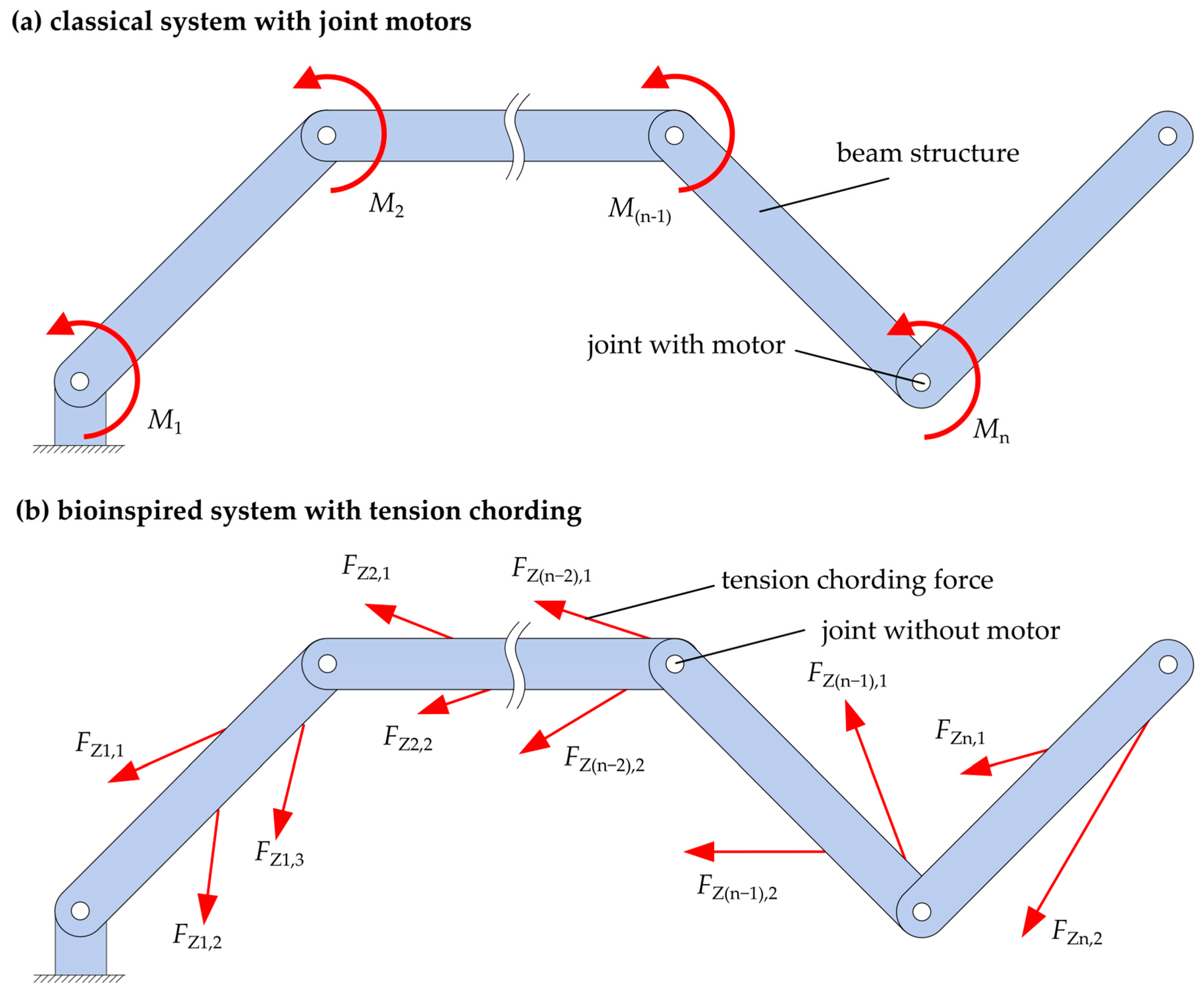
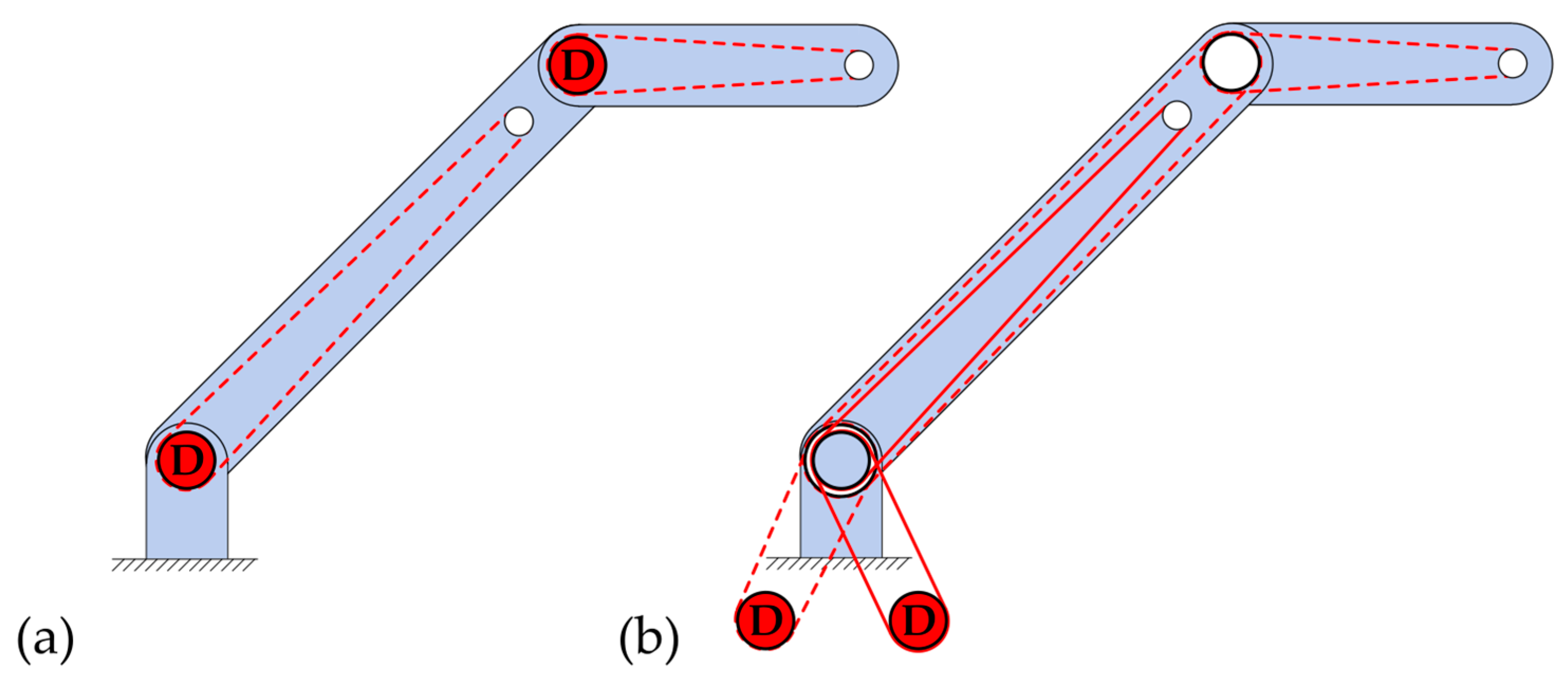
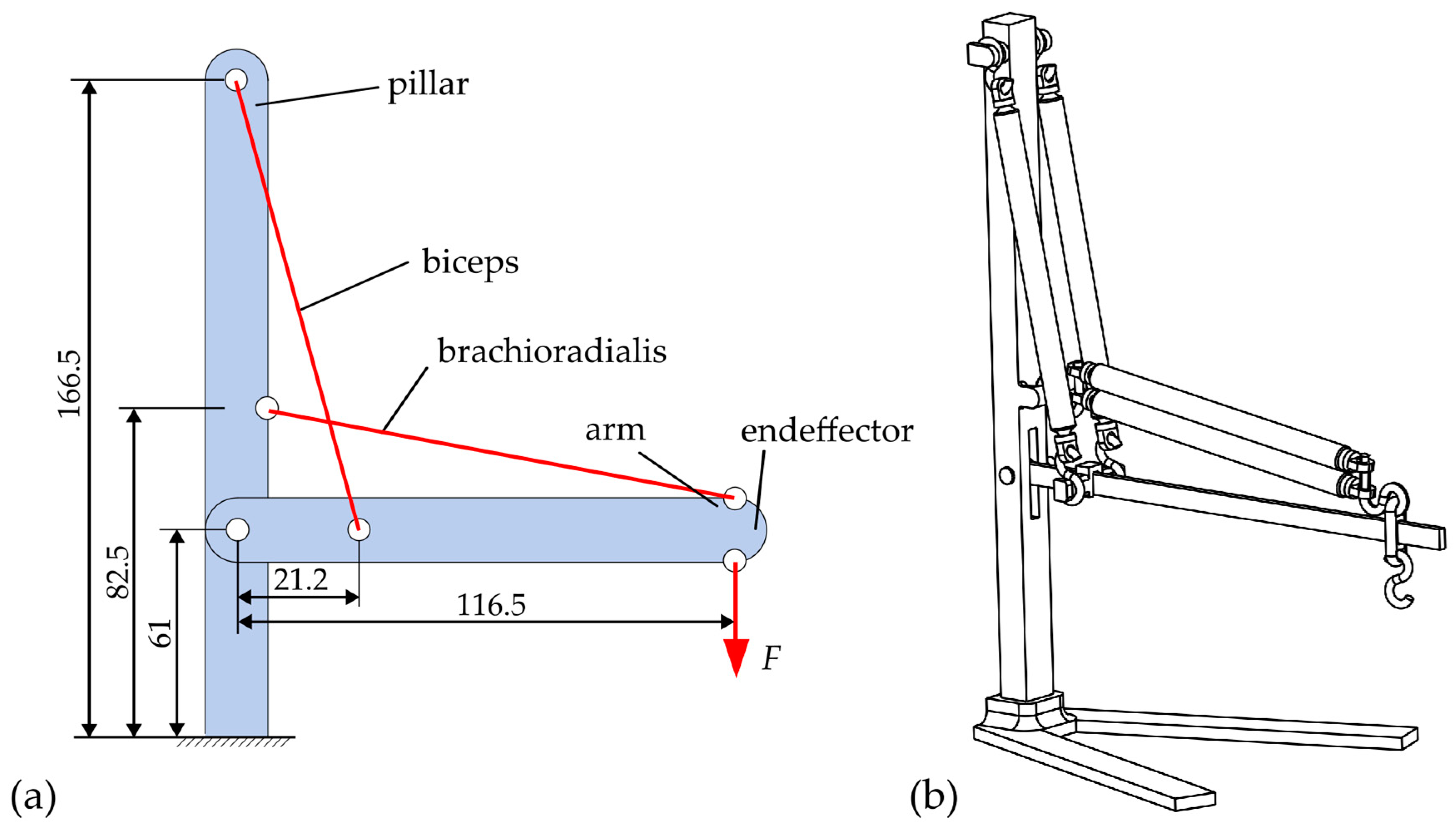
2.2. Model Consideration
2.3. Selected Methodological Procedure for the Assessment of the Linear Actuators
- 1.
- Literature-based methodology: Initially, the state of the art in the literature is purposefully summarized to determine which linear actuators exist. Since there is already a large number of technical linear actuators, partly independent of and partly inspired by biological models, this state of the art is first of all examined against the background of the possible use for tension chording. These results are then assessed against technical requirements. It should be noted that the results of this literature-based research are not all-encompassing, as this is not possible within the scope of this paper and is also not target-oriented. A more detailed explanation for this way of proceeding can be found at the beginning of Section 3, and the results of the first step are in Section 3.1.
- 2.
- Experimental methodology: Based on the state of the art in the literature and the assessment of the suitability of linear actuators in the first step, two suitable actuators are selected in this paper as examples, and their performance is separately investigated and assessed using two individual simple technical demonstrators. The results of this step are presented in Section 3.2.
3. Results
- Artificial muscles;
- Rope pull actuators;
- Hydraulic actuators;
- Mechanical linear actuators, such as threaded rods;
- Electromechanical actuators, such as linear motors;
- Further varieties (no claim to completeness).
3.1. Results of the Summary of the State of the Art for Linear Actuators
3.1.1. Results to the Summary of the State of the Art of Artificial Muscles
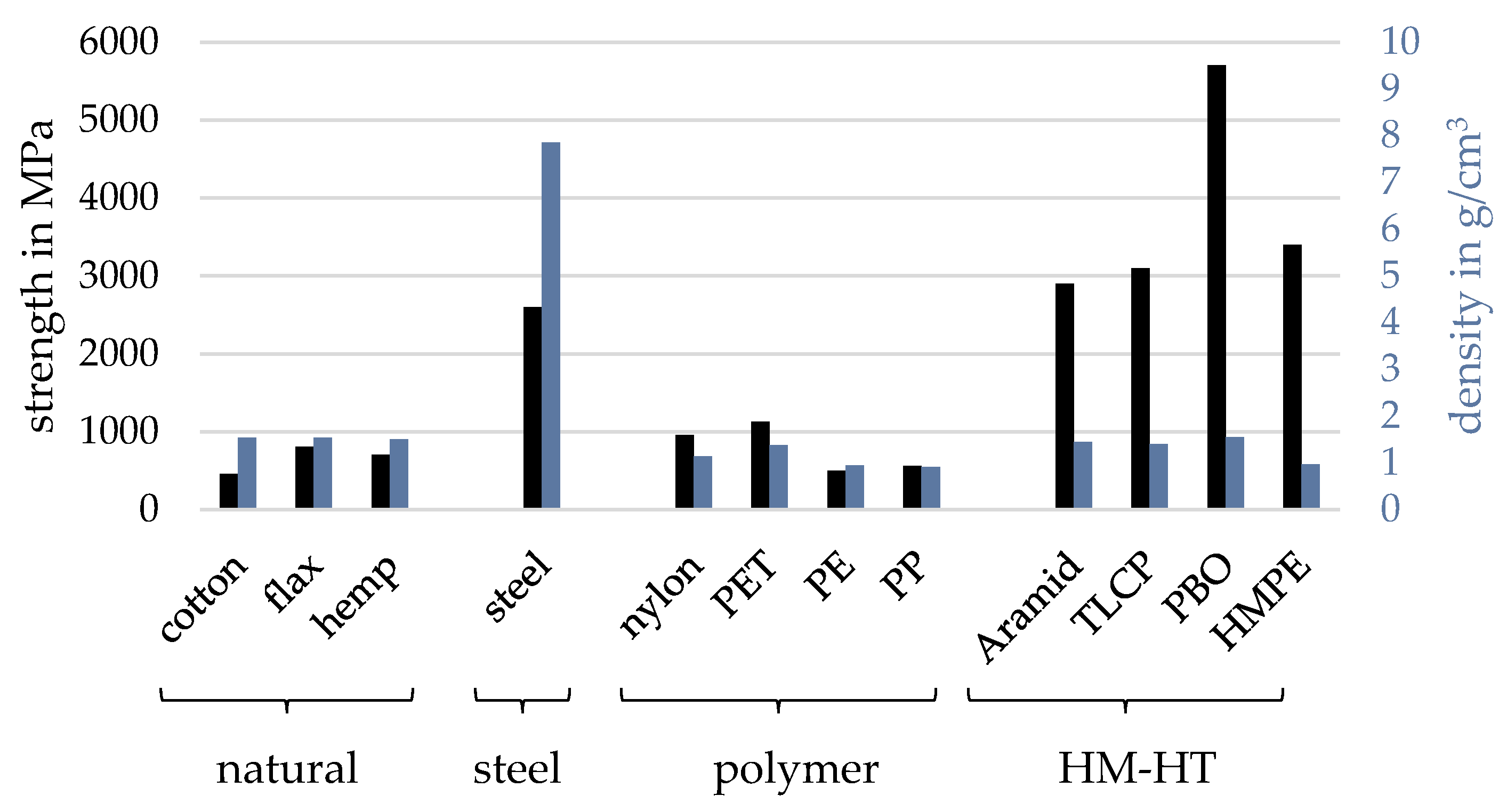
3.1.2. Results of Ropes as Actuators
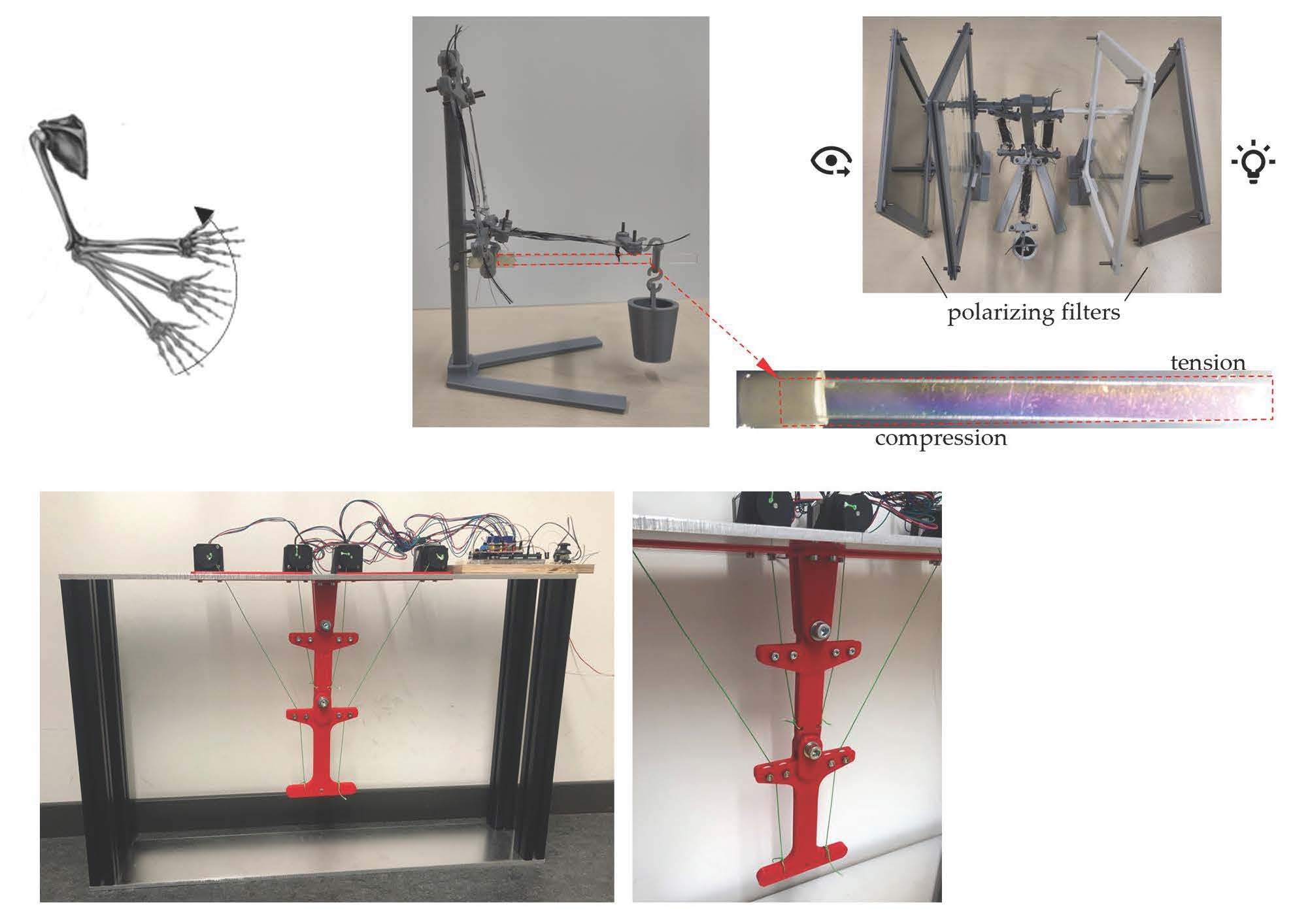
3.2. Results of the Demonstrators
3.2.1. Demonstrator with Artificial Muscles
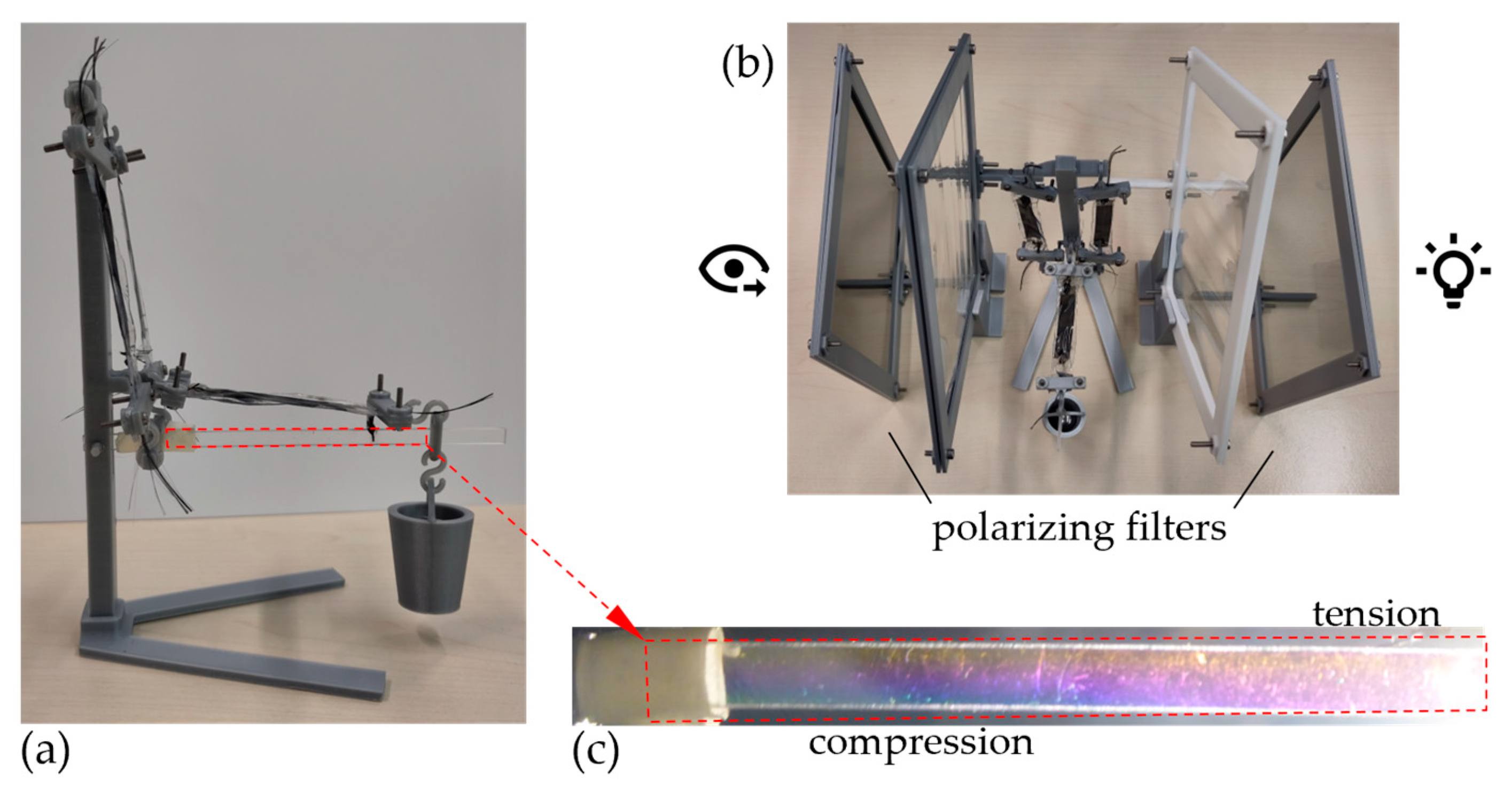
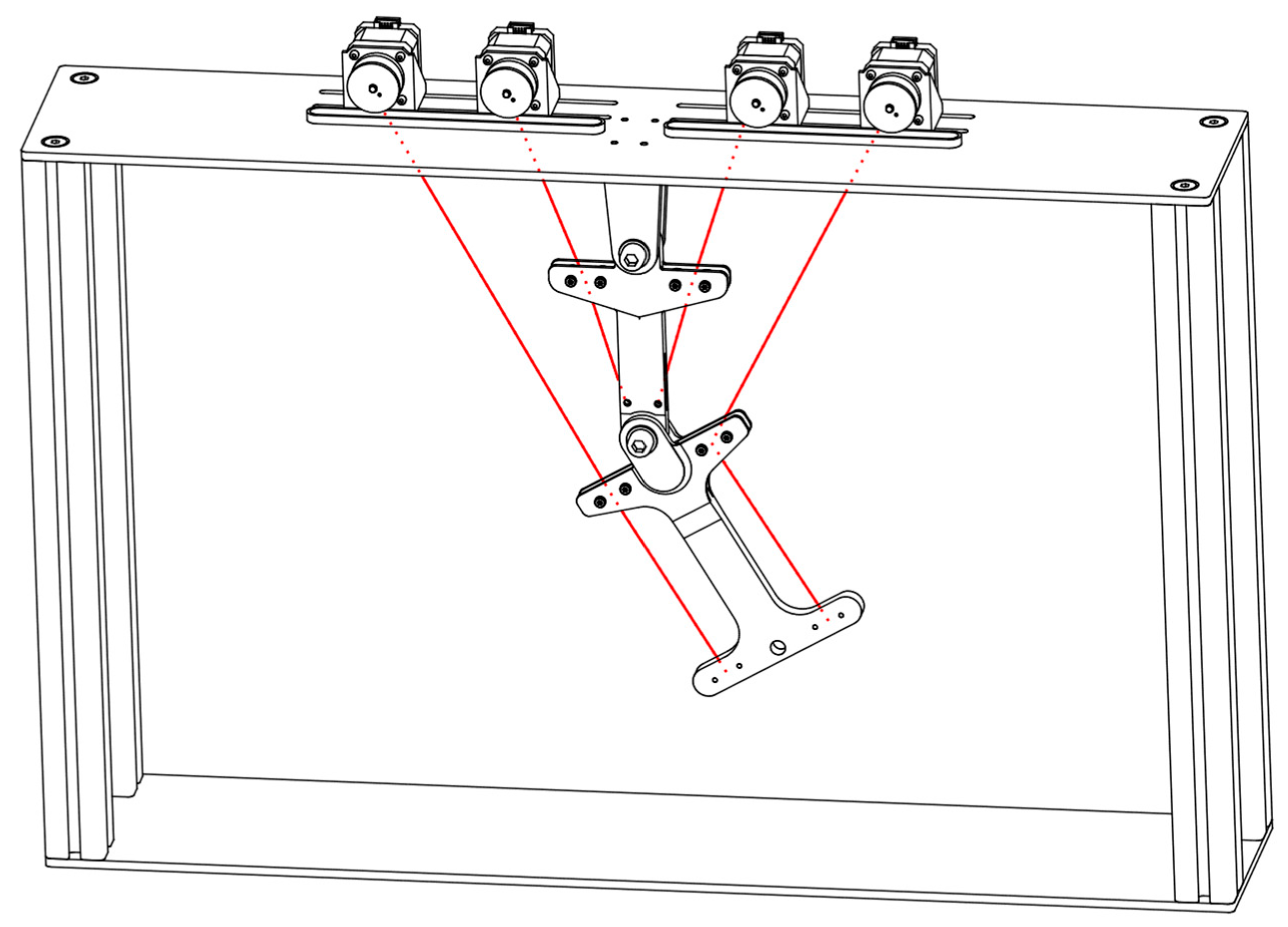
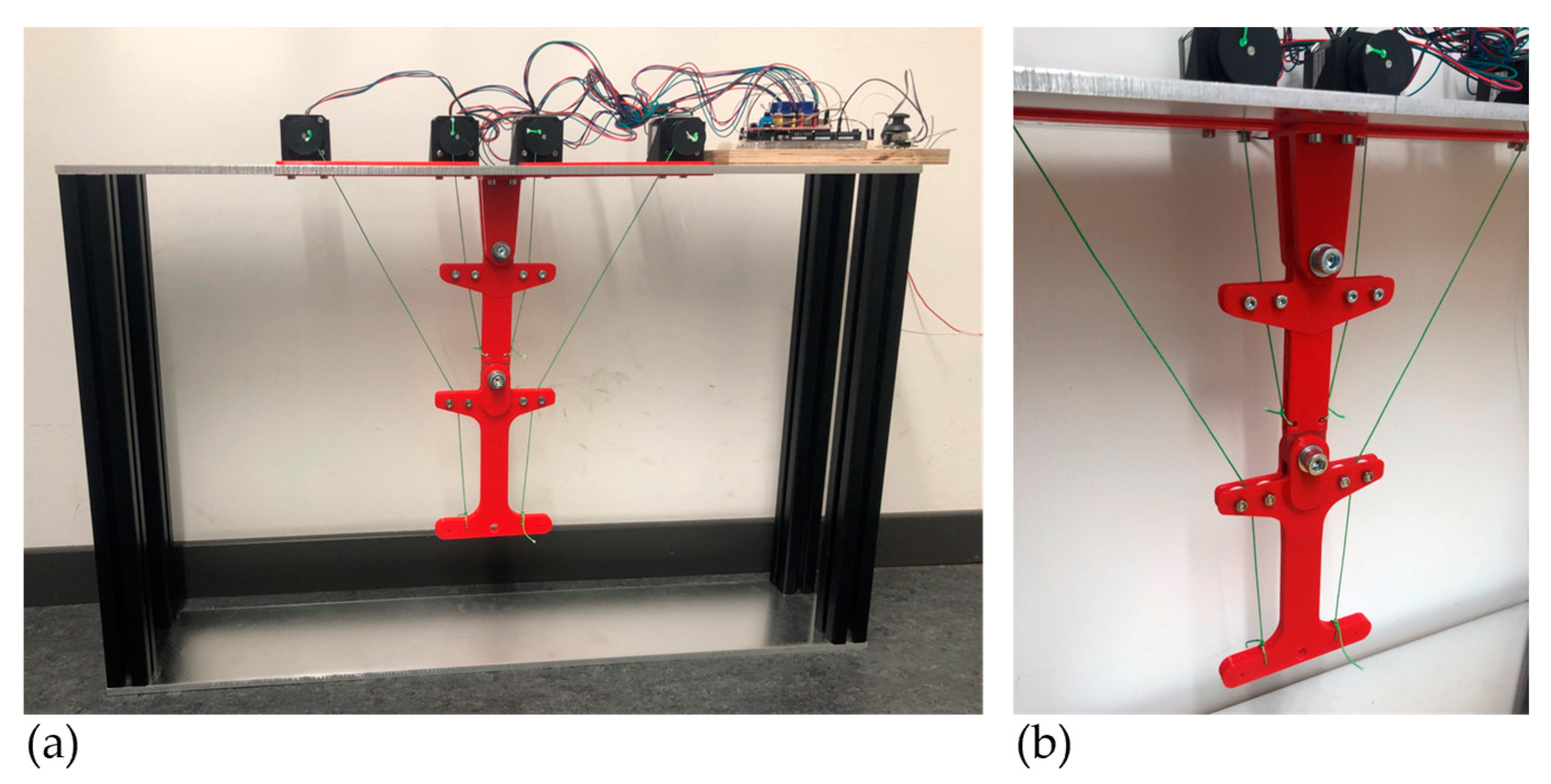
3.2.2. Demonstrator with Ropes
4. Discussion
5. Conclusions
- Detailed studies on dynamic system behavior, elasticity, and damping by using ropes as actuators.
- Detailed investigations into motion generation with redundant actuators and the associated advanced aspects, such as the number of rope pulls (the degree of kinematic indeterminacy), their positioning, and the necessary design rules. Additionally, the identification of the possible systems that can benefit from tension chording. Control engineering questions as well as path control related questions, which can also be used to actively minimize bending (which was not considered at all in this paper).
- Further research into artificial muscles and the possible marketability of suitable actuators, as this type of actuator may become relevant again.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nachtigall, W.; Wisser, A. Bionik in Beispielen; Springer: Berlin/Heidelberg, Germany, 2013; ISBN 978-3-642-34766-5. [Google Scholar]
- Richard, H.A.; Kullmer, G. Biomechanik; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2020; ISBN 978-3-658-28332-2. [Google Scholar]
- Volmer, J. Getriebetechnik; Vieweg+Teubner Verlag: Wiesbaden, Germany, 1978; ISBN 978-3-528-04096-3. [Google Scholar]
- Ruchholtz, S.; Wirtz, D.C. (Eds.) Orthopädie und Unfallchirurgie Essentials; Georg Thieme Verlag: Stuttgart, Germany, 2010; ISBN 9783131484413. [Google Scholar]
- Frost, H.M. Bone’s mechanostat: A 2003 update. Anat. Rec. Part A Discov. Mol. Cell. Evol. Biol. 2003, 2003, 1081–1101. [Google Scholar] [CrossRef]
- Wolff, J. Das Gesetz der Transformation der Knochen (Reprint); Pro Business: Berlin, Germany, 2010; Volume 1892. [Google Scholar]
- Mancuso, M.E.; Wilzman, A.R.; Murdock, K.E.; Troy, K.L. Effect of External Mechanical Stimuli on Human Bone: A narrative review. Prog. Biomed. Eng. 2022, 4, 012006. [Google Scholar] [CrossRef]
- van der Meulen, M.C.H.; Prendergast, P.J. Mechanics in Skeletal Development, Adaptation and Disease. Philos. Trans. Math. Phys. Eng. Sci. 2000, 358, 565–578. [Google Scholar] [CrossRef]
- Pauwels, F. Gesammelte Abhandlungen zur Funktionellen Anatomie des Bewegungsapparates; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1965. [Google Scholar]
- Engelhardt, A. Die kausale Histogenese (Pauwels, Kummer) und angrenzende biomechanische Erkenntnisse als Grundlage der zementlosen Verankerung von Hüftendoprothesen. In Die Zementlose Fixation von Hüftendoprothesen; Morscher, E., Ed.; Springer: Berlin/Heidelberg, Germany, 1983; pp. 20–27. ISBN 978-3-662-00968-0. [Google Scholar]
- VDI 6224-3. In Bionik—Bionische Strukturoptimierung im Rahmen Eines Ganzheitlichen Produktentstehungsprozesses; Beuth-Verlag: Berlin, Germany, 2017.
- Bartz, M.; Uttich, E.; Bender, B. Transfer of lightweight design principles from the musculoskeletal system to an engineering context. Des. Sci. 2019, 5, e19. [Google Scholar] [CrossRef]
- Uttich, E.; Bartz, M.; Bender, B. Review of the mechanisms of action in the musculoskeletal system as a basis for new simulation models. In Proceedings of the 8th World Congress of Biomechanics, Dublin, Ireland, 8–12 July 2018. [Google Scholar]
- Gößling, R.; Herzog, M.; Witzel, U.; Bender, B. Compensation of bending moments as a nature-inspired design principle? In Proceedings of the DESIGN 2014 13th International Design Conference, Dubrovnik, Croatia, 19–22 May 2014. [Google Scholar]
- Mattheck, C. Design in der Natur; Rombach GmbH + Co Verlagshaus KG: Freiburg, Germany, 1997; ISBN 3793091503. [Google Scholar]
- Turner, C.H. Three rules for bone adaption to mechanical stimuli. Bone 1998, 1998, 399–407. [Google Scholar] [CrossRef] [PubMed]
- Ruff, C.; Holt, B.; Trinkaus, E. Who’s Afraid of the Big Bad Wolff?: “Wolff’s Lawänd Bone Functional Adaptation”. Am. J. Phys. Anthropol. 2006, 2006, 484–498. [Google Scholar] [CrossRef]
- Sugiyama, T.; Meakin, L.B.; Browne, W.; Galea, G.L.; Price, J.S.; Lanyon, L.E. Bones’ adaptive response to mechanical loading is essentially linear between the low strains associated. J. Bone Miner. Res. 2012, 27, 1784–1793. [Google Scholar] [CrossRef] [PubMed]
- Lutz, F.; Mastel, R.; Runge, M.; Stief, F.; Schmidt, A.; Meurer, A.; Witte, H. Calculation of muscle forces during normal gait under consideration of femoral bending moments. Med. Eng. Phys. 2016, 38, 1008–1015. [Google Scholar] [CrossRef] [PubMed]
- Del Vecchio, A.; Holobar, A.; Falla, D.; Felici, F.; Enoka, R.M.; Farina, D. Tutorial: Analysis of motor unit discharge characteristics from high-density surface EMG signals. J. Electromyogr. Kinesiol. 2020, 53, 102426. [Google Scholar] [CrossRef]
- Damsgaard, M.; Rasmussen, J.; Christensen, S.T.; Surma, E.; de Zee, M. Analysis of musculoskeletal systems in the AnyBody Modeling System. Simul. Model. Pract. Theory 2006, 14, 1100–1111. [Google Scholar] [CrossRef]
- Gößling, R.; Eicker, H.; Bartz, M.; Bender, B. Biomechanische Betrachtungen der Berechnung von Kräften mit Menschmodellen. In Design for X: Beiträge zum 25. DfX-Symposium, Oktober 2014; TuTech Verl.: Hamburg, Germany, 2014; pp. 111–120. ISBN 978-3-941492-79-0. [Google Scholar]
- Kaminaga, H. Wire Driven Multi-fingered Hand. In Humanoid Robotics: A Reference; Goswami, A., Vadakkepat, P., Eds.; Springer: Dordrecht, The Netherlands, 2018; pp. 1–23. ISBN 978-94-007-7194-9. [Google Scholar]
- Witte, H.; Fischer, M.S.; Schilling, N.; Ilg, W.; Dillmann, R.; Eckert, M.; Wittenburg, J. Konstruktion vierbeiniger Laufmaschinen anhand biologischer Vorbilder. Konstruktion 9-2000 2000, 46–50. [Google Scholar]
- Möhl, B. A Composite Drive with Separate Control of Force and Position. In Proceedings of the 11th International Conference on Advanced Robotics 2003 in Coimbra (ICAR 2003), Coimbra, Portugal, 30 June–3 July 2003; pp. 1606–1610. [Google Scholar]
- Klug, S.; Möhl, B.; Stryk, O.v.; Barth, O. Design and Application of a 3 DOF Bionic Robot Arm. In Proceedings of the AMAM 2005, Illmenau, Germany, 25–30 September 2005. [Google Scholar]
- Ananthanarayanan, A.; Azadi, M.; Kim, S. Towards a bio-inspired leg design for high-speed running. Bioinspir. Biomim. 2012, 7, 46005. [Google Scholar] [CrossRef]
- Blandini, L.; Haase, W.; Weidner, S.; Böhm, M.; Burghardt, T.; Roth, D.; Binz, H.; Sawodny, O.; Sobek, W. Der Demonstrator D1244: Das weltweit erste adaptive Hochhaus. Bautechnik 2022, 99, 452–462. [Google Scholar] [CrossRef]
- Nemoto, T.; Walter, J.; Bachmann, C.; Gerlich, M.; Reitelshofer, S.; Franke, J. Highly Dynamic 2-DOF Cable-Driven Robotic Wrist Based on a Novel Topology. IEEE Robot. Autom. Lett. 2022, 7, 5727–5734. [Google Scholar] [CrossRef]
- Walter, J.; Rothfischer, L.; Stierstorfer, R.; Nemoto, T.; Franke, J.; Reitelshöfer, S. Tensegrity-Inspired Joint Can Protect from Impacts by Isolating. In Cable-Driven Parallel Robots; Caro, S., Pott, A., Bruckmann, T., Eds.; Springer Nature: Cham, Switzerland, 2023; pp. 344–354. ISBN 978-3-031-32321-8. [Google Scholar]
- VDI 6220 Blatt 2. In Bionik—Bionische Entwicklungsmethodik—Produkte und Verfahren; Beuth-Verlag: Berlin, Germany, 2023.
- Wanieck, K.; Hamann, L.; Bartz, M.; Uttich, E.; Hollermann, M.; Drack, M.; Beismann, H. Biomimetics Linked to Classical Product Development: An Interdisciplinary Endeavor to Develop a Technical Standard. Biomimetics 2022, 7, 36. [Google Scholar] [CrossRef] [PubMed]
- Bartz, M.; Uttich, E.; Wanieck, K.; Bender, B.; Wartzack, S. An Approach to Transfer Biological Solutions Based on the Interaction of Mechanisms to Technical Products. Proc. Des. Soc. 2022, 2, 831–840. [Google Scholar] [CrossRef]
- Bartz, M.; Gößling, R.; Remus, R.; Bender, B. Development of a Bioinspired Approach for the Design of Kinematic Chains. In Proceedings of the DESIGN 2018 15th International Design Conference, Dubrovnik, Croatia, 21–24 May 2018; Faculty of Mechanical Engineering and Naval Architecture, University of Zagreb: Zagreb, Croatia; The Design Society: Glasgow, UK, 2018; pp. 975–984. [Google Scholar]
- Bartz, M. Transfer des Muskuloskelettalen Leichtbaus auf Offene Kinematische Ketten; Verlag Dr. Hut: München, Germany, 2019; ISBN 978-3-8439-3935-5. [Google Scholar]
- Grob GmbH Antriebstechnik. Grundlagen Linearer Antriebstechnik; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2014; ISBN 978-3-658-03148-0. [Google Scholar]
- Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. 2018, 30, 1704407. [Google Scholar] [CrossRef] [PubMed]
- Kalita, B.; Leonessa, A.; Dwivedy, S.K. A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application. Actuators 2022, 11, 288. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.D.; Pei, Q.; Stanford, S.; Oh, S.; Eckerle, J.; Full, R.J.; Rosenthal, M.A.; Meijer, K. Dielectric elastomer artificial muscle actuators: Toward biomimetic motion. In Smart Structures and Materials 2002: Electroactive Polymer Actuators and Devices (EAPAD)—Proceedings of the SPIE’s 9th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 17 March 2002; Bar-Cohen, Y., Ed.; SPIE: Bellingham, WA, USA, 2002; pp. 126–137. [Google Scholar]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Mahl, T.; Hildebrandt, A.; Sawodny, O. Forward kinematics of a compliant pneumatically actuated redundant manipulator. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 1267–1273, ISBN 978-1-4577-2119-9. [Google Scholar]
- Mayer, A.; Müller, D.; Raisch, A.; Hildebrandt, A.; Sawodny, O. Demonstration-based Programming of Multi-Point Trajectories for Collaborative Continuum Robots. IFAC-PapersOnLine 2019, 52, 513–518. [Google Scholar] [CrossRef]
- Müller, D.; Veil, C.; Seidel, M.; Sawodny, O. One-Shot kinesthetic programming by demonstration for soft collaborative robots. Mechatronics 2020, 70, 102418. [Google Scholar] [CrossRef]
- Grzesiak, A.; Becker, R.; Verl, A. The Bionic Handling Assistant: A success story of additive manufacturing. Assem. Autom. 2011, 31, 329–333. [Google Scholar] [CrossRef]
- Giri, N.; Walker, I. Continuum robots and underactuated grasping. Mech. Sci. 2011, 2, 51–58. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Kofod, G. High-Strain Actuator Materials Based on Dielectric Elastomers. Adv. Mater. 2000, 12, 1223–1225. [Google Scholar] [CrossRef]
- Kunze, J.; Prechtl, J.; Bruch, D.; Nalbach, S.; Motzki, P.; Seelecke, S.S.; Rizzello, G. Design and fabrication of silicone-based dielectric elastomer rolled actuators for soft robotic applications. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XXII, Online, USA, 27 April–1 May 2020; p. 80, ISBN 9781510635272. [Google Scholar]
- Martin, S.; Bruns, A.; Franke, J. Dynamic Light Control Using Bionic Dielectric Elastomer Iris Actuators. Adv. Funct. Mater. 2022, 32, 2112260. [Google Scholar] [CrossRef]
- Jung, K.; Koo, J.C.; Nam, J.; Lee, Y.K.; Choi, H.R. Artificial annelid robot driven by soft actuators. Bioinspir. Biomim. 2007, 2, S42–S49. [Google Scholar] [CrossRef] [PubMed]
- Pei, Q.; Pelrine, R.; Rosenthal, M.A.; Stanford, S.; Prahlad, H.; Kornbluh, R.D. Recent progress on electroelastomer artificial muscles and their application for biomimetic robots. In Proceedings of the Smart Structures and Materials 2004: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 14 March 2004; p. 41. [Google Scholar]
- Löffler, R.; Tremmel, S.; Hornfeck, R. Owl-Neck-Spine-Inspired, Additively Manufactured, Joint Assemblies with Shape Memory Alloy Wire Actuators. Biomimetics 2023, 8, 117. [Google Scholar] [CrossRef] [PubMed]
- Miro, M.; Theren, B.; Schmelter, T.; Kuhlenkötter, B. SMA Actuator Usage in Upper Limb Rehabilitation Technology. In Proceedings of the ASME 2021 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Virtual, Online, 14–15 September 2021; American Society of Mechanical Engineers: New York, NY, USA, 2021. ISBN 978-0-7918-8549-9. [Google Scholar]
- Cianchetti, M.; Licofonte, A.; Follador, M.; Rogai, F.; Laschi, C. Bioinspired Soft Actuation System Using Shape Memory Alloys. Actuators 2014, 3, 226–244. [Google Scholar] [CrossRef]
- Haines, C.S.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.W.; Kim, S.H.; Fang, S.; Jung de Andrade, M.; Göktepe, F.; et al. Artificial muscles from fishing line and sewing thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef]
- Peng, Y.; Sun, F.; Xiao, C.; Iqbal, M.I.; Sun, Z.; Guo, M.; Gao, W.; Hu, X. Hierarchically Structured and Scalable Artificial Muscles for Smart Textiles. ACS Appl. Mater. Interfaces 2021, 13, 54386–54395. [Google Scholar] [CrossRef]
- Li, K.; Shen, H.; Xue, W. Wet-Driven Bionic Actuators from Wool Artificial Yarn Muscles. ACS Appl. Mater. Interfaces 2023, 15, 16232–16243. [Google Scholar] [CrossRef] [PubMed]
- Müller, R.; Franke, J.; Henrich, D.; Kuhlenkötter, B.; Raatz, A.; Verl, A. (Eds.) Handbuch Mensch-Roboter-Kollaboration; Carl Hanser Verlag GmbH & Co. KG: München, Germany, 2019; ISBN 978-3-446-45016-5. [Google Scholar]
- Kim, Y.-J. Design of low inertia manipulator with high stiffness and strength using tension amplifying mechanisms. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5850–5856, ISBN 978-1-4799-9994-1. [Google Scholar]
- VDI 2500. In Faserseile—Beschreibung—Auswahl—Bemessung/Fibre Ropes—Description—Selection—Dimensioning; Beuth-Verlag: Berlin, Germany, 2020.
- Wehking, K.-H.; Hecht, S.; Moll, D.; Novak, G.; Verreet, R. Laufende Seile: Bemessung und Überwachung, 5., Überarbeitete und Erweiterte Auflage; Expert Verlag: Renningen, Germany, 2018; ISBN 3816933637. [Google Scholar]
- Rost, A. Untersuchung von Antrieben mit Kunststoff-Faserseilen für den Einsatz in Leichtbau-Gelenkarmrobotern; Fraunhofer Verlag: Stuttgart, Germany, 2013. [Google Scholar]
- August, W.; Ren, J.; Notheis, S.; Haase, T.; Hein, B.; Woern, H. 3D Pendulum Swinging Control by an Industrial Robot Manipulator. In Proceedings of the ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics), Munich, Germany, 7–9 June 2010; pp. 1–7, ISBN 978-3-8007-3273-9. [Google Scholar]
- McKenna, H.; Hearle, J.; O’Hear, N. Handbook of Fibre Rope Technology; Woodhead: Cambridge, UK; CRC Press: Boca Raton, FL, USA, 2004; ISBN 978-1-85573-606-1. [Google Scholar]
- Siciliano, B.; Khatib, O. (Eds.) Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 978-3-540-30301-5. [Google Scholar]
- Palli, G.; Borghesan, G.; Melchiorri, C. Tendon-based transmission systems for robotic devices: Models and control algorithms. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 4063–4068, ISBN 978-1-4244-2788-8. [Google Scholar]
- Kaneko, M.; Wada, M.; Maekawa, H.; Tanie, K. A new consideration on tendon-tension control system of robot hands. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; IEEE Computer Society Press: Washington, DC, USA, 1991; pp. 1028–1033, ISBN 0-8186-2163-X. [Google Scholar]
- Feyrer, K.; Wehking, K.-H. FEYRER: Drahtseile: Bemessung, Betrieb, Sicherheit, 3. Auflage; Springer Vieweg: Berlin/Heidelberg, Germany, 2018; ISBN 978-3-642-54296-1. [Google Scholar]
- Brühwiler, E.; Menn, C. Stahlbetonbrücken, 3., Aktualisierte und erw. Aufl.; Springer: Vienna, Austria, 2003; ISBN 978-3-7091-6070-1. [Google Scholar]
- Wittel, H.; Jannasch, D.; Voßiek, J.; Spura, C. Roloff/Matek Maschinenelemente: Normung, Berechnung, Gestaltung, 23., Überarbeitete und Erweiterte Auflage; Springer Vieweg: Wiesbaden, Germany, 2017; ISBN 978-3-658-17896-3. [Google Scholar]
- Suzuki, M. Complex and Flexible Robot Motions by Strand-Muscle Actuators. In Climbing and Walking Robots: Towards New Applications; Zhang, H., Ed.; I-Tech Education and Publishing: Seattle, WA, USA, 2007; ISBN 978-3-902613-16-5. [Google Scholar]
- Uchida, H.; Nonami, K. Attitude Control of a Six-Legged Robot in Consideration of Actuator Dynamics by Optimal Servo Control System. In Climbing and Walking Robots: Towards New Applications; Zhang, H., Ed.; I-Tech Education and Publishing: Seattle, WA, USA, 2007; ISBN 978-3-902613-16-5. [Google Scholar]
- Staab, H.; Sonnenburg, A.; Hieger, C. The DOHELIX-Muscle: A Novel Technical Muscle for Bionic Robots and Actuating Drive Applications. In Proceedings of the 2007 IEEE International Conference on Automation Science and Engineering, Scottsdale, AZ, USA, 22–25 September 2007; pp. 306–311, ISBN 978-1-4244-1153-5. [Google Scholar]
- Reitelshöfer, S.; Martin, S.; Nendel, F.; Schäfer, T.; Pham, D.; Franke, J. Accelerated aerosol-jet-printing of stretchable rGO-electrodes for stacked dielectric elastomers by using a new hybrid atomizer. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XXII, Online, USA, 27 April–1 May 2020; p. 61, ISBN 9781510635272. [Google Scholar]
- Tryson, M.; Kiil, H.-E.; Benslimane, M. Powerful tubular core free dielectric electro activate polymer (DEAP) push actuator. In Electroactive Polymer Actuators and Devices (EAPAD) 2009; Bar-Cohen, Y., Wallmersperger, T., Eds.; SPIE: Bellingham, WA, USA, 2009; Volume 7287, pp. 447–457. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Artificial Muscles | Ropes | |
|---|---|---|
| Advantages |
|
|
| Disadvantages |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bartz, M.; Jüttner, M.; Halmos, F.; Uhlich, E.; Klein, M.; Drumm, P.; Dreßler, E.; Martin, S.; Walter, J.; Franke, J.; et al. Assessment of the Suitability of Selected Linear Actuators for the Implementation of the Load-Adaptive Biological Principle of Redundant Motion Generation. Biomimetics 2024, 9, 236. https://doi.org/10.3390/biomimetics9040236
Bartz M, Jüttner M, Halmos F, Uhlich E, Klein M, Drumm P, Dreßler E, Martin S, Walter J, Franke J, et al. Assessment of the Suitability of Selected Linear Actuators for the Implementation of the Load-Adaptive Biological Principle of Redundant Motion Generation. Biomimetics. 2024; 9(4):236. https://doi.org/10.3390/biomimetics9040236
Chicago/Turabian StyleBartz, Marcel, Michael Jüttner, Fabian Halmos, Elias Uhlich, Max Klein, Patricia Drumm, Erkan Dreßler, Sina Martin, Jonas Walter, Jörg Franke, and et al. 2024. "Assessment of the Suitability of Selected Linear Actuators for the Implementation of the Load-Adaptive Biological Principle of Redundant Motion Generation" Biomimetics 9, no. 4: 236. https://doi.org/10.3390/biomimetics9040236
APA StyleBartz, M., Jüttner, M., Halmos, F., Uhlich, E., Klein, M., Drumm, P., Dreßler, E., Martin, S., Walter, J., Franke, J., & Wartzack, S. (2024). Assessment of the Suitability of Selected Linear Actuators for the Implementation of the Load-Adaptive Biological Principle of Redundant Motion Generation. Biomimetics, 9(4), 236. https://doi.org/10.3390/biomimetics9040236