3.1. Structural Concept Generation with Combination Chart
The basic components for a multifunctional lawnmower can be classified into two different groups, namely the mechanical and electronic components. The mechanical components include the mower shape, locomotion types and blade types. It is important to note that nylon string cutters (one of the substitutes for blades) are not included in the selection as these cutters often wear out faster than metal blades and are not suitable for smart lawnmowers that require minimal maintenance [
28]. The electronic components comprise the microcontroller, battery and motor types for the blade and wheels. All the common choices for each component are listed in a combination chart as shown in
Table 2.
Different combinations of mechanical components lead to different basic structural concepts for the lawnmower. For this case, there are in total 5 different structural concepts.
Table 3 shows the hand-sketched drawings of the bottom and isometric views for all the structural concepts.
Structural concept 1 includes a rectangular-shaped robot with a continuous track driving mechanism and razor blades attached to a spinning disc. Structural concept 2 uses a rectangular-shaped robot with four equally sized wheels and a large individual cutting blade. Structural concept 3 combines a circular-shaped robot with four equally sized wheels and a large individual cutting blade. Structural concept 4 integrates a rectangular-shaped robot with two big rear wheels, one round ball wheel at the front, and razor blades attached to a spinning disc. Lastly, structural concept 5 combines a circular-shaped robot with two big rear wheels, one round ball wheel at the front, and two swinging blades at the front.
3.2. Screening and Scoring of Structural Concepts
During the screening process shown in
Table 4, it is found that only structural concepts 1, 2, and 4 are selected for the subsequent scoring process since the net scores of these concepts are found to be higher than the net score for structural concept 3 (the concept of reference).
It is important to note that the scoring and ranking processes are done by the main author of this study with some advice from his co-authors. The weightage and ratings are proposed by the main author based on his specific experience and knowledge of various lawnmower designs. The main author is also in the forefront of the design work and has a good grasp of the prototyping requirements, cost and ergonomics aspects involved in this study. Therefore, in reference to the main author’s superior design sense in the specific area of lawnmower designs, the co-authors of this study concurred to the ratings and rankings provided by the main author.
The rating system used for the scoring process ranged from 1 to 5, and the description for each score is defined as such:
For the scoring process, each selection criterion is given a weight (W). To determine the weighted score (WS) of each criterion, the rating (R) is multiplied by the weight (WS = R × W). The total weighted score for each structural concept is compared, and the structural concept with the highest score is prioritised for further development.
The weight of each selection criterion depends on the constraints in the project. The major constraints include the project time and budgetary limitations. As it is important to ensure that the project is completed within these constraints, criteria such as ease of maintenance and ease of manufacturing are given high weights (30% each). It is also highly desired that the multifunctional lawnmower performs optimally with regard to functionality which accounts for edging possibilities, stability and multifunctionality. Therefore, the weight for functionality is set at 40%. During the scoring process, structural concept 4 obtained the highest score and is hence selected as the lawnmower’s basic structure (refer to
Table 5).
Since the electronic parts are not emphasised in the visualisation of the lawnmower’s basic structure, their screening process is done individually. The screening processes for the battery, blade motor and Arduino board types are shown in
Table 6,
Table 7 and
Table 8. In the end, the lead acid battery, brushed DC motor and Arduino Uno are selected. For the most part, the lead acid battery and brushed DC motor are selected over the other components due to lower cost, while the Arduino Uno is selected because it is easily accessible and less complex as contrasted to the other types of Arduino boards.
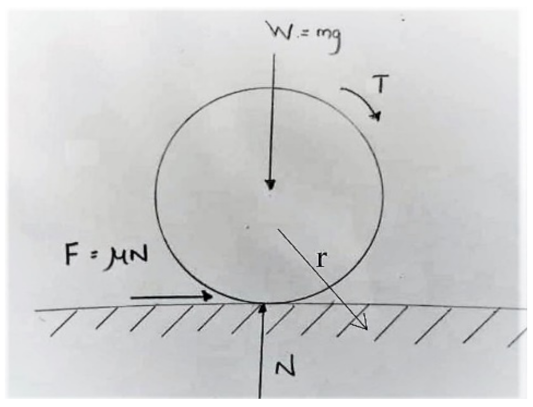
The design process is extended to the detailed selection of each component. These components include the motors and battery. For the gear motor (drive motor), the maximum torque without slippage from the rear wheel is calculated to estimate the approximate torque required by the gear motor. This maximum torque without slippage is calculated using the basic equation, T = F × r, where F refers to tangential force (Newton) and r refers to the radius of the wheel (metre).
Figure 1 shows the free-body diagram for the driving wheel. To perform the preceding calculation, the tangential force (
F), normal force (
N) and friction coefficient (
μ) need to be known first. The
N is calculated as 23.125
N (obtained from static stress analysis at preliminary design stage), and the friction coefficient for the contact between the wheel and dry grass is between 0.5 to 0.8.
Therefore, the maximum torque without slippage can be calculated as T = µNr = (0.8) (23.125) (0.075) = 1.388 Nm. Since the friction coefficient used in the equation is an estimated value, a gear motor with a torque that is close to the calculated maximum torque value (1.388 Nm ± 10%) is acceptable. The selected gear motor is a 12 V 1 A, 24 rpm and 1.47 Nm DC motor.
The other type of motor required by the blades is the high-speed brushed DC motor. The motor requires a minimum rotational speed of 3000 rpm in order to create enough force and speed for the blades to cut grass. It is preferable for this motor to possess the same rated voltage (12 V) as the gear motor as this condition standardises the design and facilitates the selection of the other parts (battery and motor controller). The selected high-speed brushed DC motor is a 12 V 1.3 A, 10,000 rpm and 0.032 Nm DC motor.
Since the rated voltage for both motors is 12 V, a 12 V battery is selected. However, the ampere-hour (Ah) for the battery still needs to be determined according to the requirements. The battery should be a lead-acid battery at an acceptable size (able to fit the smart lawnmower), with a minimum operating time of 2 h and good availability. The minimum Ah value of the battery can be calculated as the total current × minimum operating hours.
The total current for the three motors is calculated as 3.3 A (1 A + 1 A + 1.3 A). Hence, the minimum ampere-hour for the battery is 6.6 Ah, whereby Ah = (3.3) (2) = 6.6 Ah. Hence, a 12 V battery with 7.2 Ah is selected for this study.
3.3. Key Features Scoring and Combinations
Based on the benchmarking done on existing products, patents and journals, a total of 18 different features are extracted (refer to
Table 9). This list also included some self-generated ideas. Since it is not possible to accommodate every single feature into one device, a scoring process is also done on the listed features.
The scoring process for the listed features is shown in
Table 10 with a rating system that is similar to previous scoring process. For this scoring process, probability weights are used for each selection criteria. After the scoring process, the features with a total score of less than 3 are omitted from the selection process.
Table 11 shows the 11 features with scores that are equal or above 3. Since some of the products or designs share the same feature, the total number of key features is reduced as shown in
Table 10 (For example feature 1 and feature 8).
These 11 selected features are further divided into five different groups with some constraints applied. First, each feature is allowed to only appear twice in different combinations. Secondly, the total score for each combination is to be within a range of 16 to 18. The purpose of these constraints is to ensure that the five different combinations would be able to compete with one another in a fair situation.
To prolong the servicing time of the lawnmower and reduce the usage of non-renewable energy when charging the lawnmower, feature 9 (Charges from sunlight while mowing the lawn) from
Table 11 is selected as a pre-requisite feature and included in every combination.
Table 12 shows the 5 different feature combinations along with their respective total scores. These combinations are prioritised for the final concept generation stage since their scores are within the prescribed range.
3.5. Material Selection
The material selection is performed for the multifunctional lawnmower’s body (shell). The four groups of materials that are commonly used as structural elements for vehicle systems include wood, metal, composite materials, and plastics (from
Section 2.2). The following material selection procedures are applied.
The design requirements are tabulated in
Table 15, which comprises the main functions (the function of the lawnmower’s body), objectives of using the “Bubble Chart” and constraints (fixed or must-have achievements by the design).
To achieve the design requirement, the material must be able to withstand buckling and bending loads to a certain extent with minimal density. The material indices for buckling and bending are similar and represented as M2 = E/ρ, where E refers to Young’s modulus, and ρ refers to density. However, there is another material index applied in the Ashby chart which is expressed as M1 = E. This material index is used to specify the minimum value of the material’s Young’s modulus. Since wood generally has a relatively low E value compared to the other 3 groups of materials, M1 is set at the wood region where E is around 1 GPa. The establishment of M1 helps eliminate about half of the materials in the Ashby chart.
The second material index,
M2 identifies materials with higher strength but lower density. With the establishment of material indices
M1 and
M2, only a quarter of the materials are left to be considered in the Ashby chart.
Table 16 shows the remaining 4 materials selected from the Ashby chart after screening the materials using the material indices.
Based on the screening process in
Table 17, wood is selected among the 4 materials. However, there are 3 types of commonly used wood which include hardwood, softwood, and manufactured board. Further screening revealed that the manufactured board is the most suitable wood type for this study (see
Table 18). Lastly, different types of manufactured boards (medium density fibre board, plywood, hardboard, and chipboard) are scored using probability weights for each selection criteria. In the end, plywood is chosen to be the shell of the lawnmower (see
Table 19).
3.7. Stress Analysis
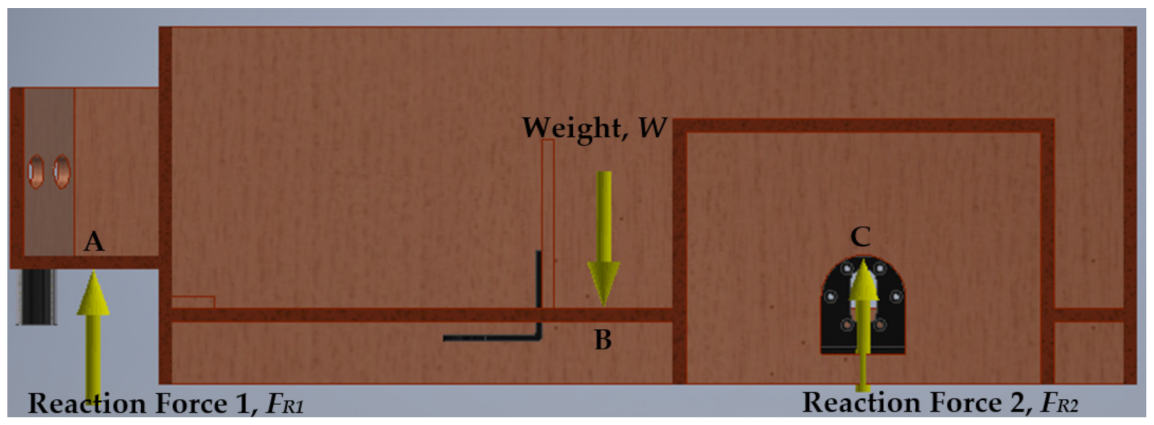
For the stress analysis, the reaction force on the body needs to be identified using static force analysis.
Figure 3 and
Figure 4 show the free-body diagram of the lawnmower and the simplified free-body diagram with known and unknown variables respectively. The static force equilibrium equation when the lawnmower is in a static equilibrium state includes the summation of moment and summation of force acting on the system equated to zero:
The total weight, W of the lawnmower is estimated to be 80 N (since its mass is about 8 kg) and the following assumptions are made.
Assumptions:
The total weight is acting at the centre of the lawnmower.
Roller reaction is at the front wheel.
Pin reaction is at the rear wheel.
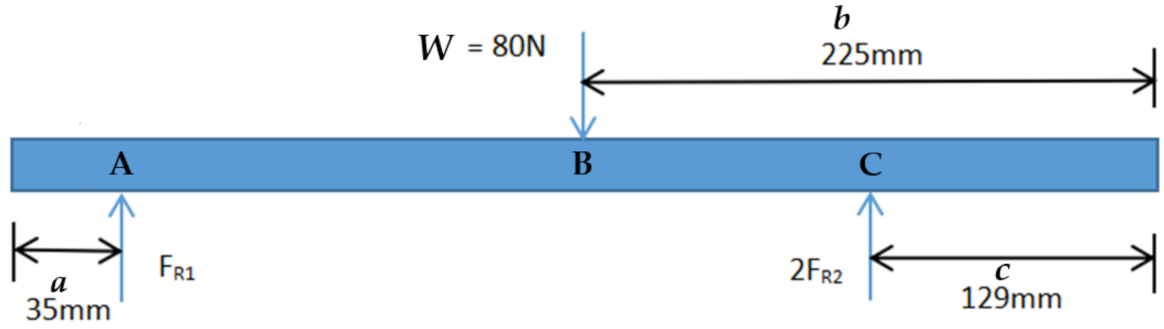
Based on the static force equilibrium equation and assumptions, the pin reaction at the front (FR1) is contributed by the front wheel, while the two pin reactions (FR2) are contributed by the two rear wheels of the lawnmower.
Based on Equations (3) and (4), the reaction forces
FR1 and
FR2 are directly proportional to the weight,
W of the lawnmower. Other information obtained from both equations include the reaction force
FR2 which is also directly proportional to the length denoted as
c and inversely proportional to length denoted as
b. Furthermore,
FR1 can be reduced by increasing the length denoted as
b and/or increasing the length denoted as
c. Based on the finalised design of the lawnmower, the lengths denoted as
a,
b and
c are represented as 35 mm, 225 mm, and 129 mm, respectively.
After identifying all the reaction forces, these values are used for stress simulation with Autodesk Inventor (version 2019) in order to observe the stress distribution on the lawnmower in a static equilibrium state.
Table 22 shows the simulation results for the von Mises stress, displacement, and safety factor. The maximum stress (0.4691 MPa) occurs at the rear wheel’s mounting. On the other hand, the maximum displacement (0.009708 mm) after simulation occurs at the edge of the front surface. The minimum safety factor of the lawnmower in a static equilibrium state is 15, which is a value that is higher than 1. This outcome indicates that although a deflection of around 0.009708 mm exists at the base plate, the lawnmower is likely to still be structurally safe for use without any risks of static failure.
Table 23 shows pictures of the prototype lawnmower.









{kind=link}
{kind=link}
{kind=link}
{kind=link}




















