
An Integration Matrix for Investigating the Impact of Design Changes in Mechatronic Products


Abstract
:1. Introduction
- (1)
- By modeling the structure of a current product, it is possible to assist in design progression and design improvements. The difficulty is that the new design or component must satisfy the current function and be compatible with minimal effects.
- (2)
- There are extensive and intricate relationships between a mechatronic product’s components due to the complex structure of mechatronic systems. These characteristics make it easier to quantify the interactions between the components and systematically develop mathematical models for mechatronic products.
- (3)
- Identifying a change propagation path is difficult since a mechatronic system comprises many different designs, and any modification to one of them will affect the others. Therefore, the process must be straightforward so that this can be taken into consideration.
- (4)
- With the guidance of activities from changing paths, a designer may analyze each path that must be identified and choose which path requires more work.
2. Related Methods and Research
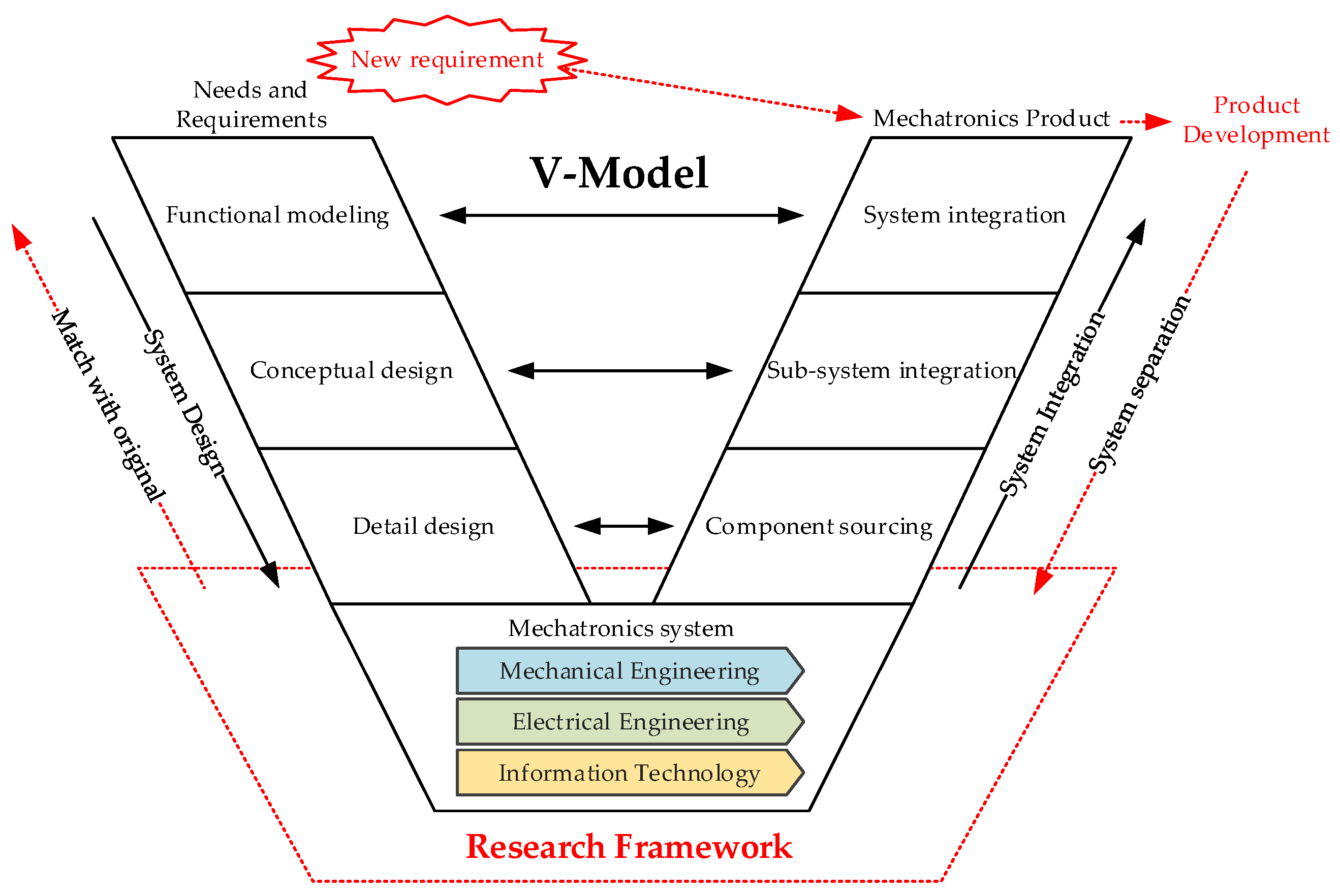
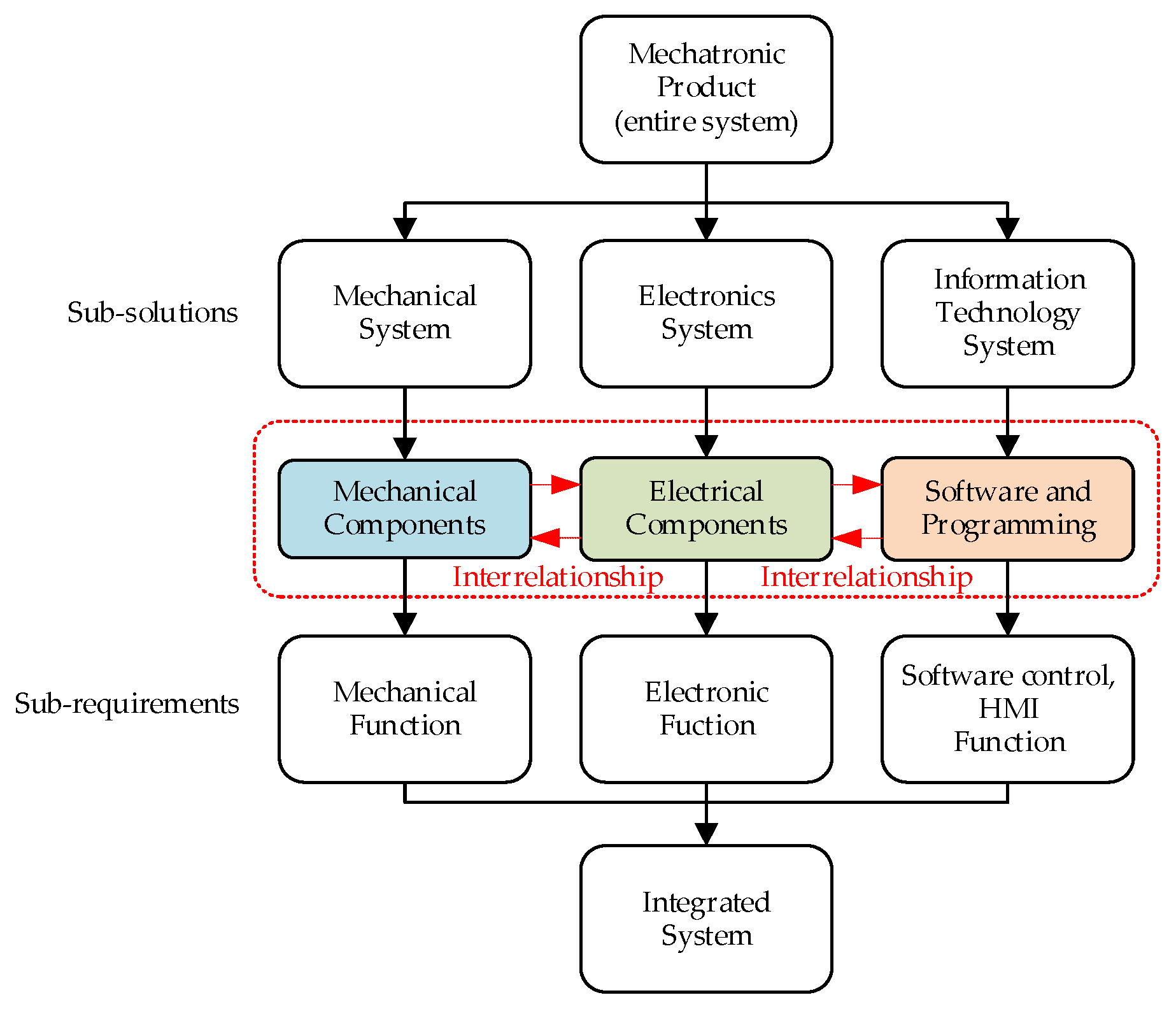
2.1. Mechatronic Systems
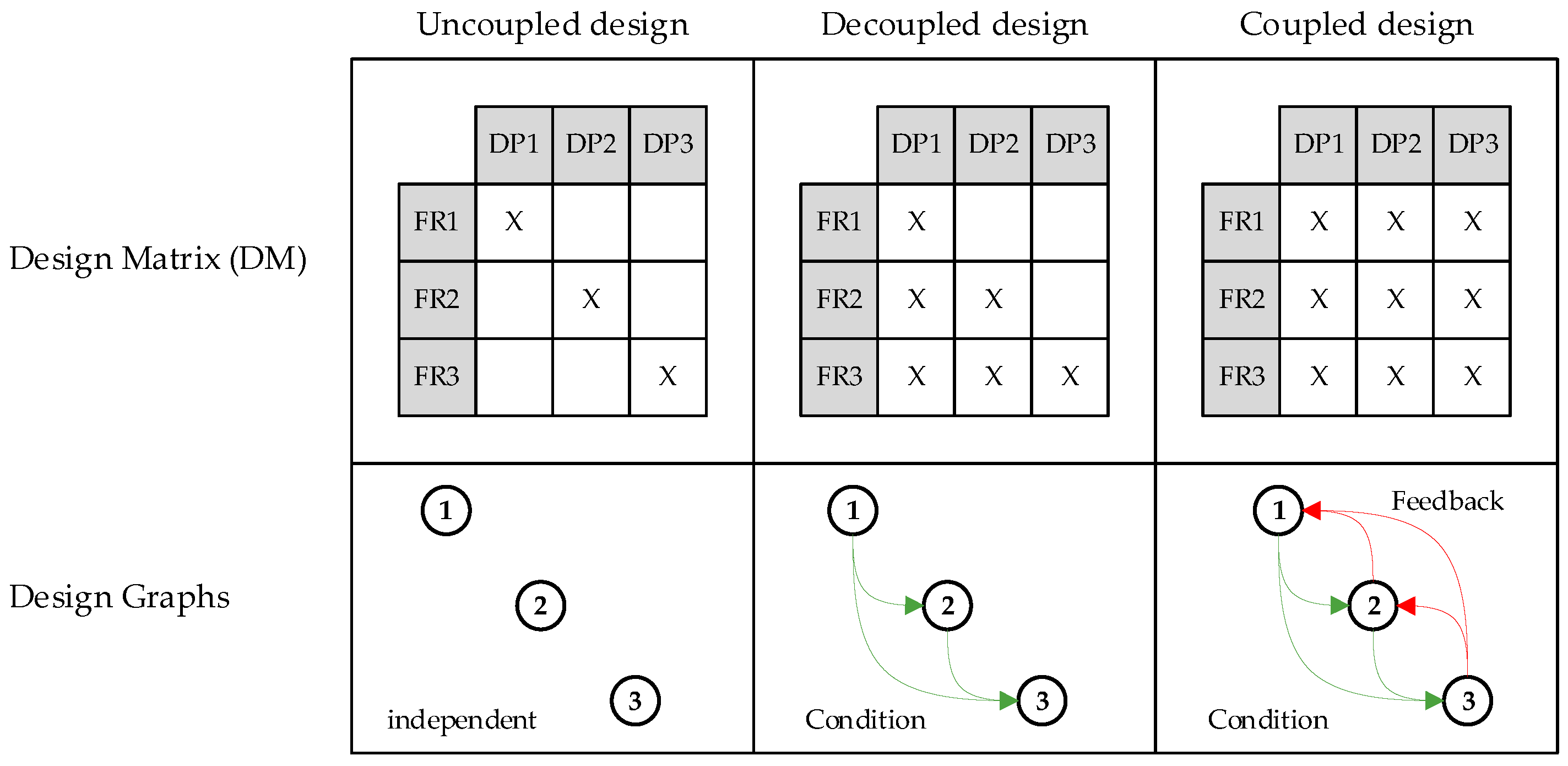
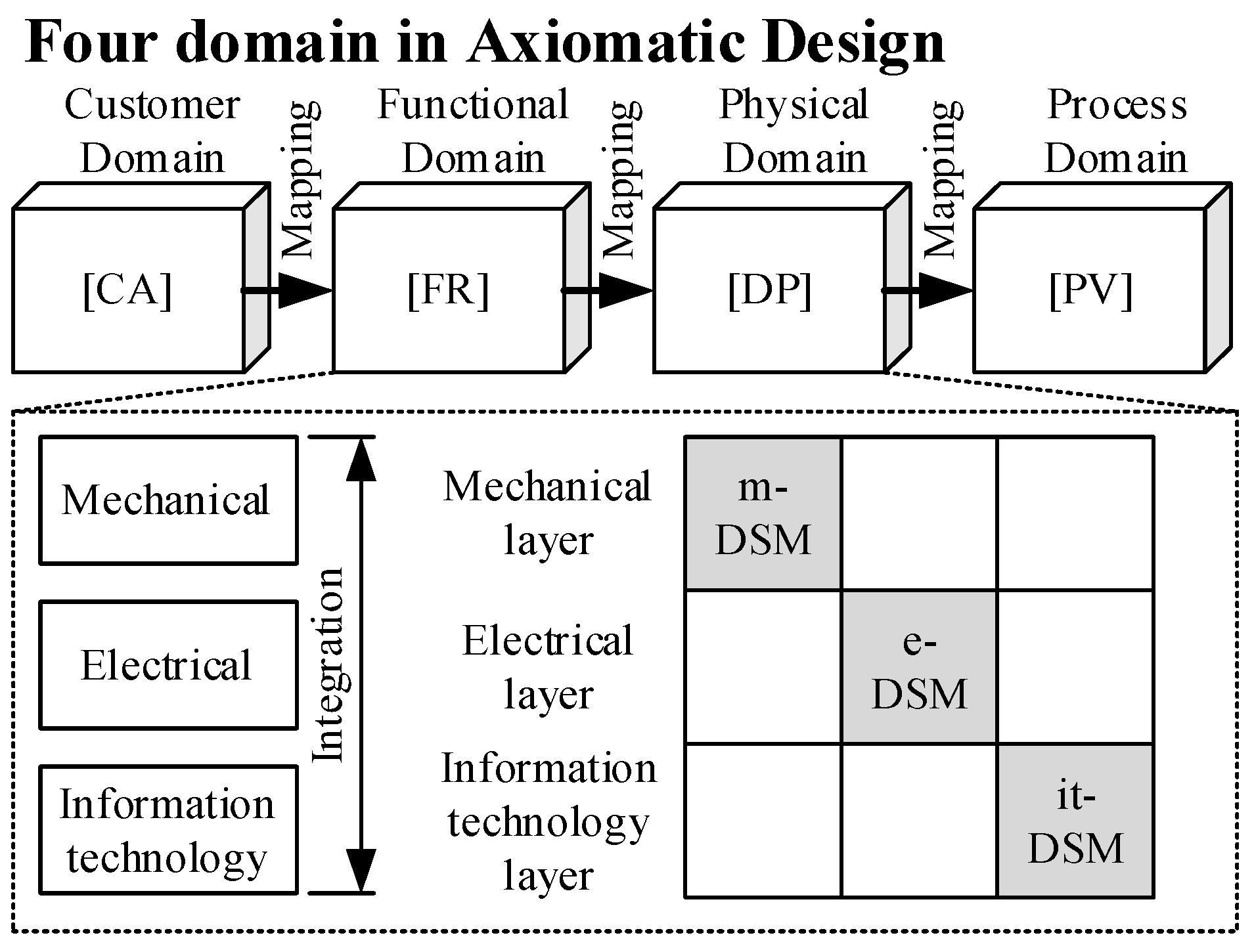
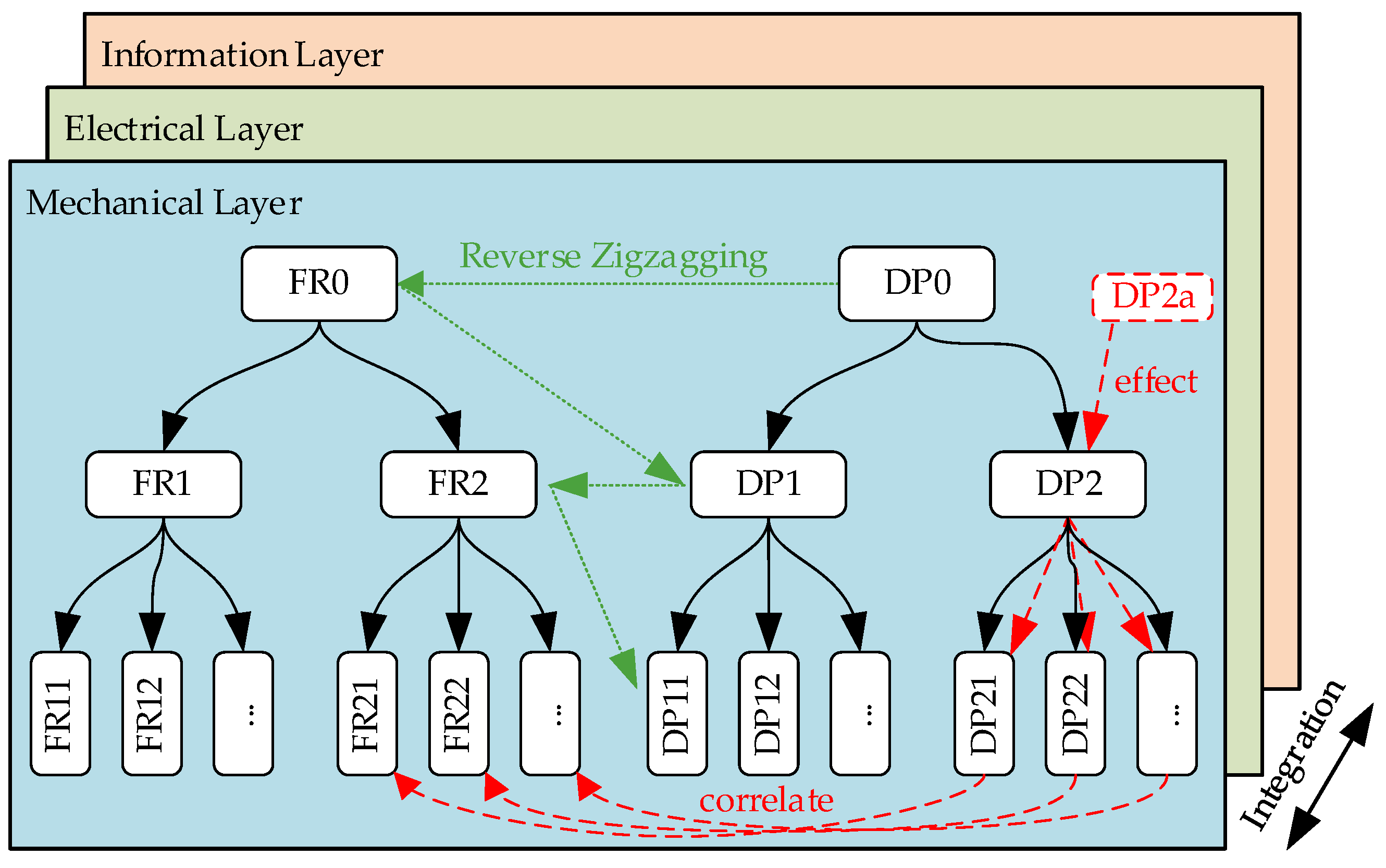
2.2. Axiomatic Design Theory
- Customer domain—customer attributes (CAs);
- Functional domain—functional requirements (FRs);
- Physical domain—design parameters (DPs);
- Process domain—process variables (PVs).
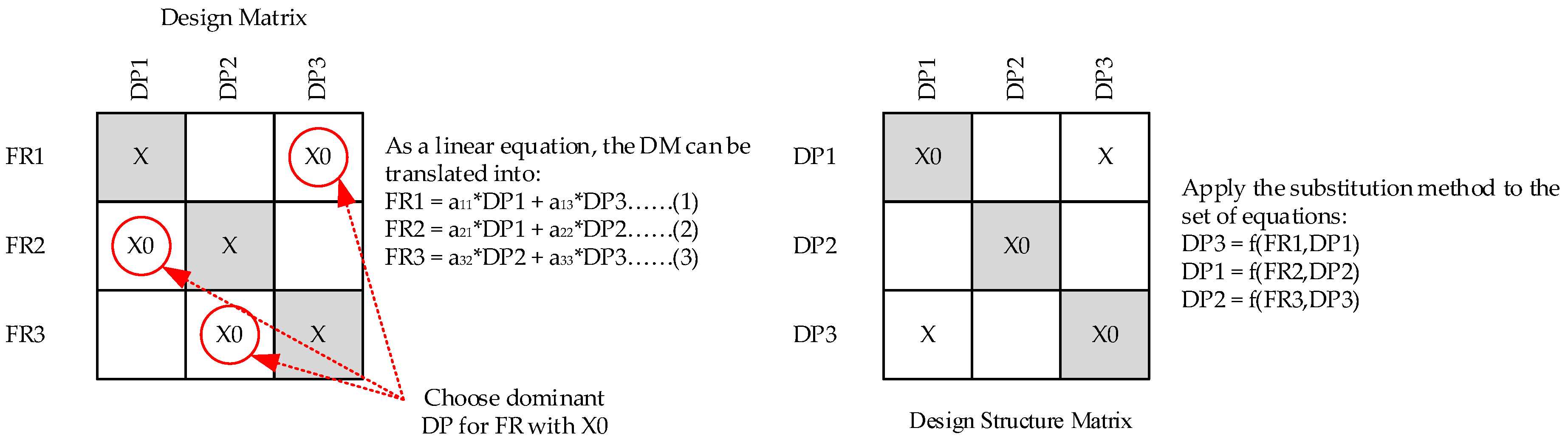
2.3. Design Structure Matrix
- (1)
- In each row of the DM, choose the dominant entry (X0 in DM);
- (2)
- Construct a composite matrix (CM) to describe the equation relationship between FRs and DPs;
- (3)
- To obtain the derived DSM, permute the CM by rearranging the rows and columns so that all dominating entries appear on the major diagonal. Such a conversion procedure is illustrated by the straightforward example in Figure 4.
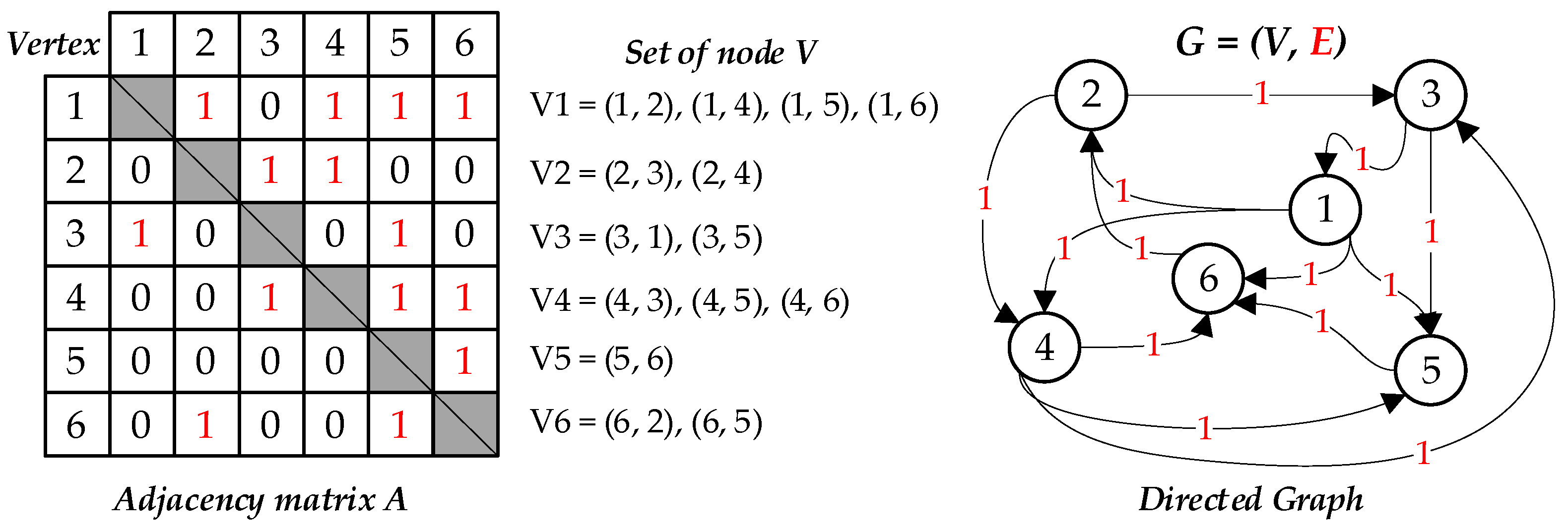
2.4. Networks and Graphs
2.5. Breadth-First Graph Traversal
2.6. EM–TOPSIS
3. Methodology
3.1. Analyzing the Relationships of Existing Design
3.1.1. Decomposition of Existing Design
3.1.2. Conversion of DM to DSM
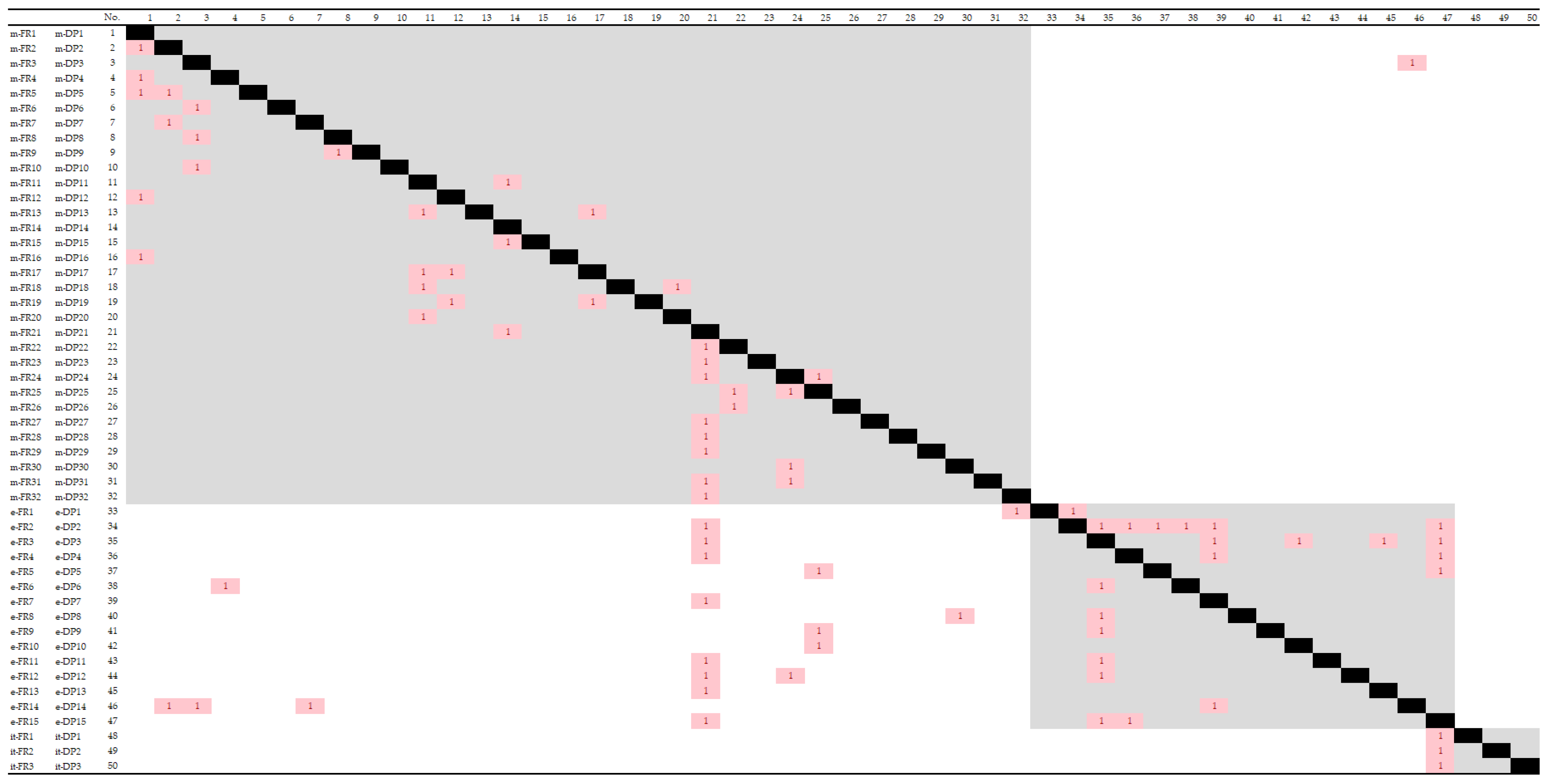
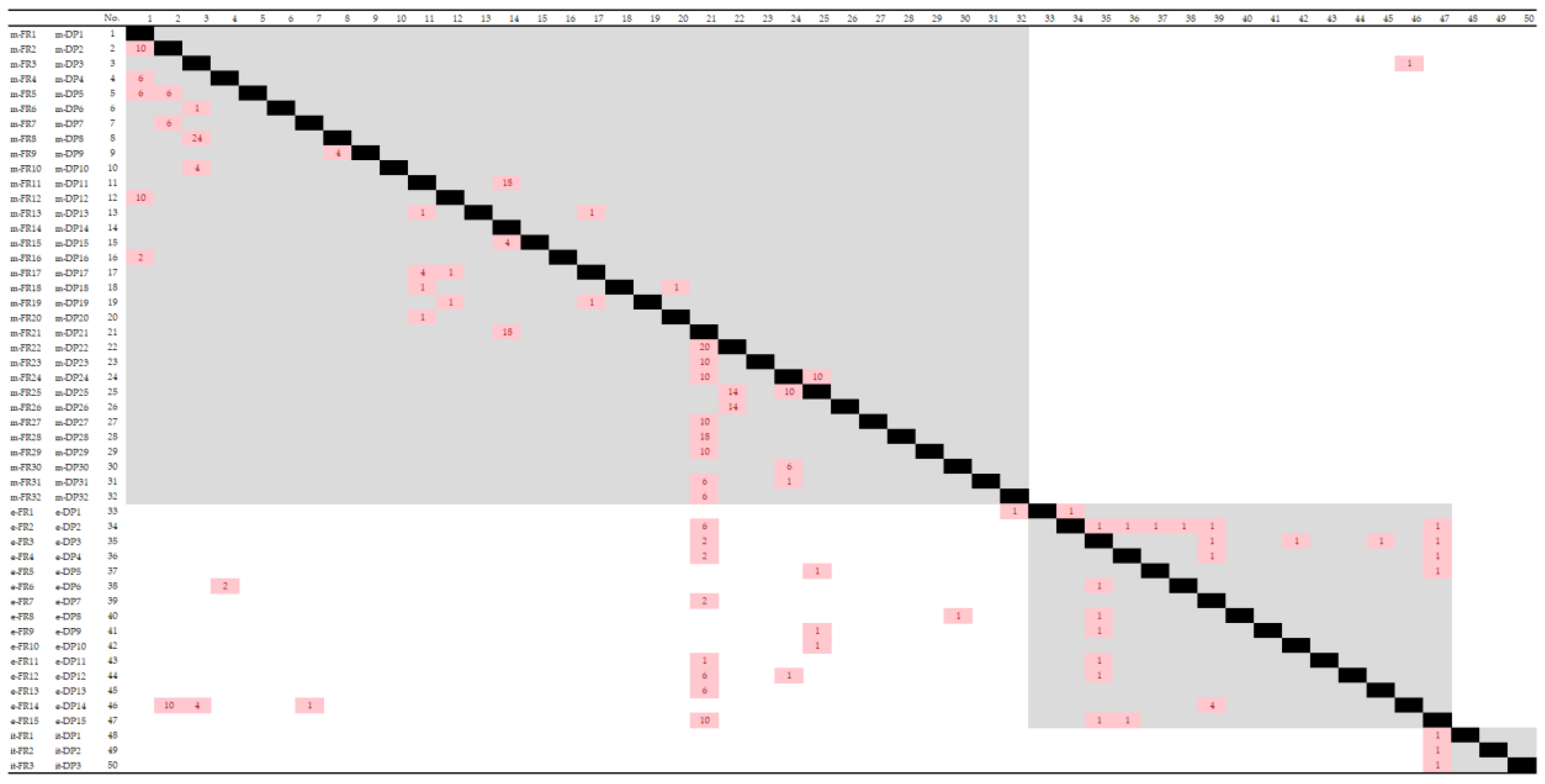
3.1.3. Construct Integration Matrix (Coherency Matrix)
3.2. Evaluation of Change Propagation Path
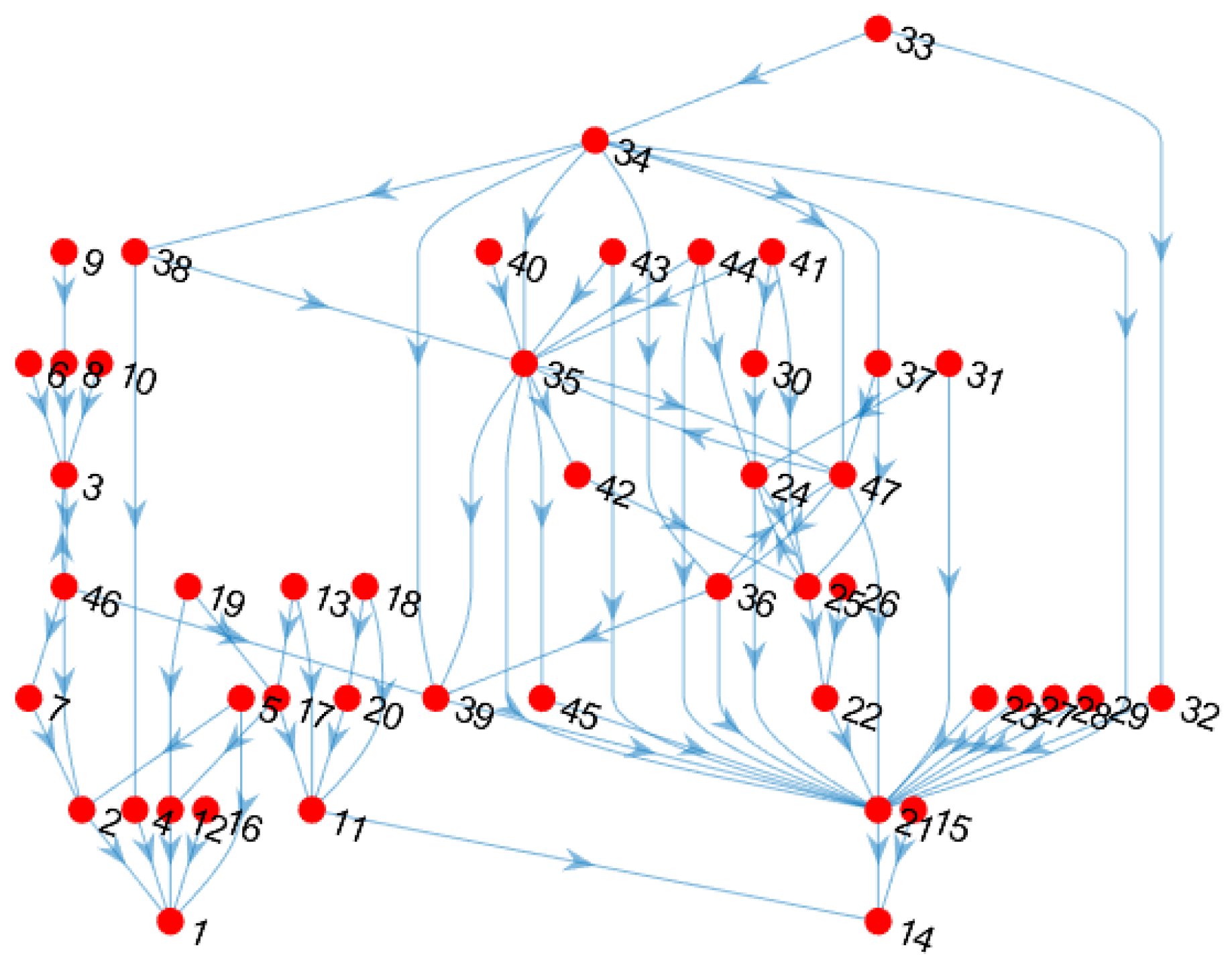
3.2.1. Construction of Network Model
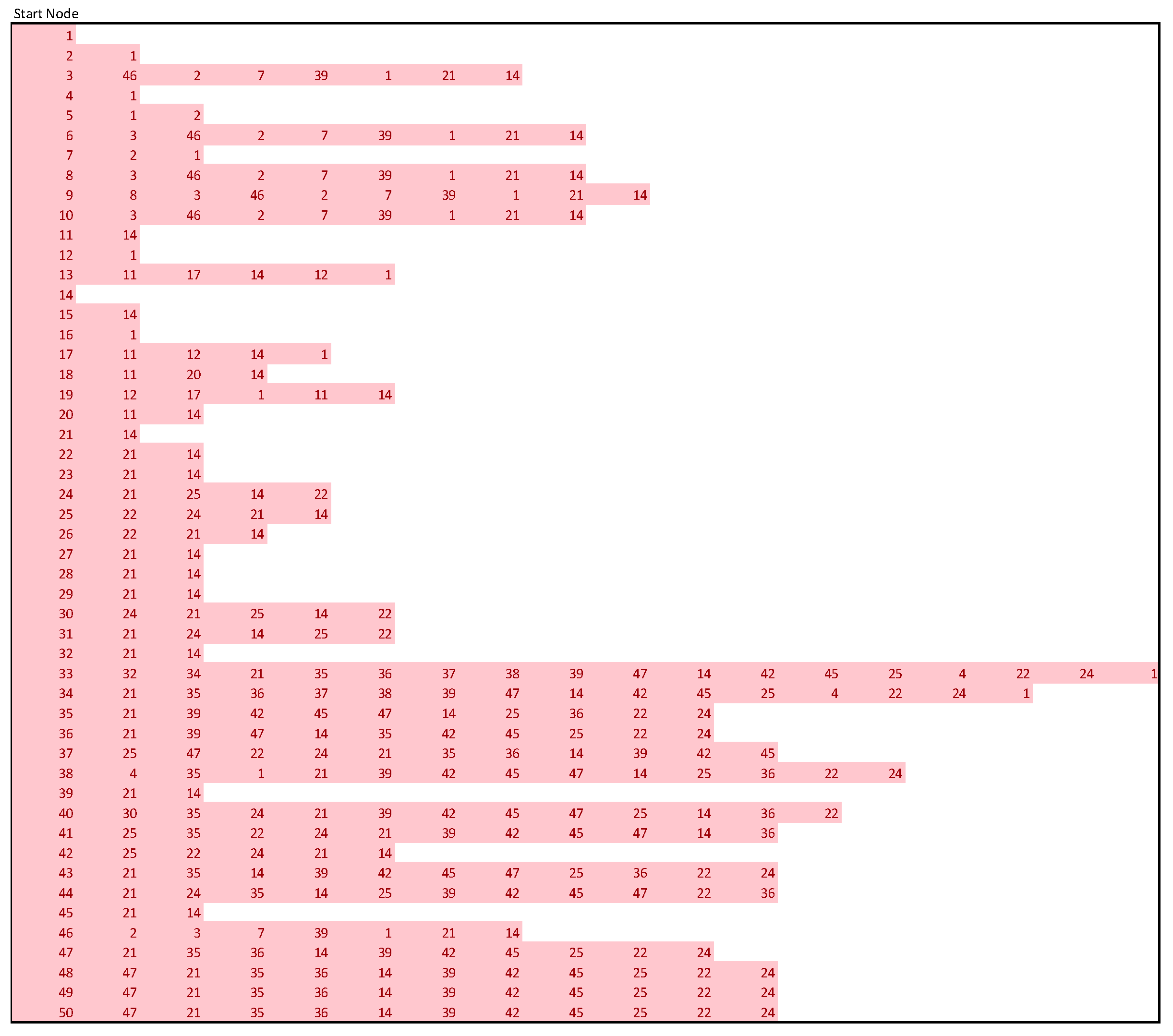
3.2.2. Searching All Change Paths
3.2.3. Qualifying Changing Workload
- (a)
- Network change rate (NCR)
- (b)
- Change magnification node rate (CMNR)
- (c)
- Change magnification rate (CMR)
- (d)
- Output a decision reference
4. Illustration of the Methodology: A Case Study of an Automatic Guided Vehicle (AGV)
4.1. Analyzing the Relationship of Existing Design
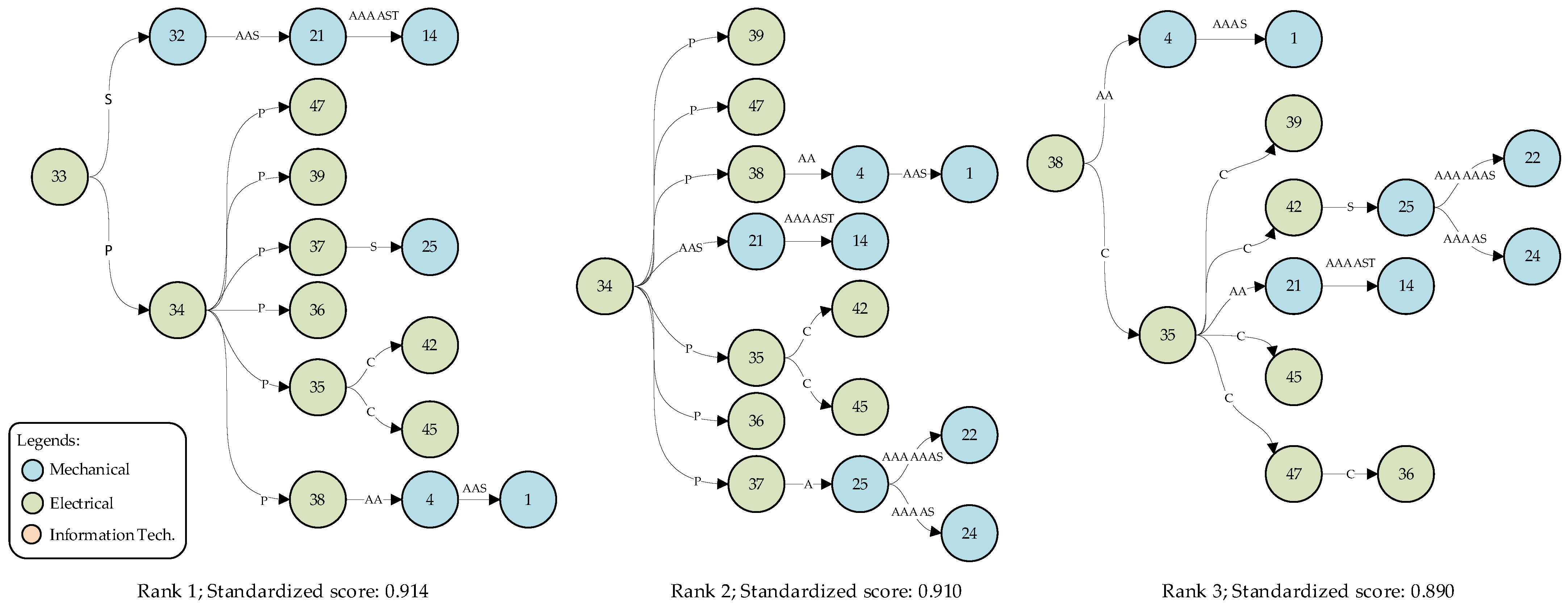
4.2. Evaluation of Change Propagation Path
4.3. Analyzing the Results and Discussion
4.3.1. Analyzing the Results
4.3.2. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Janthong, N. Using Axiomatic Design and TRIZ in (re) designing of product architecture toward upgradable products. In Advanced Materials Research; Trans Tech Publications Ltd.: Wollerau, Switzerland, 2013; pp. 3141–3150. [Google Scholar]
- Jarratt, T.A.W.; Eckert, C.M.; Caldwell, N.H.; Clarkson, P.J. Engineering change: An overview and perspective on the literature. Res. Eng. Des. 2011, 22, 103–124. [Google Scholar] [CrossRef]
- Brahma, A.; Wynn, D.C. Concepts of change propagation analysis in engineering design. Res. Eng. Des. 2022, 1–35. [Google Scholar] [CrossRef]
- Eckert, C.; Clarkson, P.J.; Zanker, W. Change and customisation in complex engineering domains. Res. Eng. Des. 2004, 15, 1–21. [Google Scholar] [CrossRef]
- Clarkson, P.J.; Simons, C.; Eckert, C. Predicting change propagation in complex design. J. Mech. Des. 2004, 126, 788–797. [Google Scholar] [CrossRef] [Green Version]
- Cohen, T.; Navathe, S.B.; Fulton, R.E. C-FAR, change favorable representation. Comput.-Aided Des. 2000, 32, 321–338. [Google Scholar] [CrossRef]
- Silver, M.R.; De Weck, O.L. Time-expanded decision networks: A framework for designing evolvable complex systems. Syst. Eng. 2007, 10, 167–188. [Google Scholar] [CrossRef]
- Reddi, K.R.; Moon, Y.B. Simulation of new product development and engineering changes. Ind. Manag. Data Syst. 2012, 112, 520–540. [Google Scholar] [CrossRef]
- Wang, J.; Wei, F. Analysis and evaluation of the impacts on engineering change. Ind. Eng. J.-GUANGZOU- 2006, 9, 32. [Google Scholar]
- Gumus, B.; Ertas, A.; Tate, D.; Cicek, I. The transdisciplinary product development lifecycle model. J. Eng. Des. 2008, 19, 185–200. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, W.; Shao, X. A process simulation based method for scheduling product design change propagation. Adv. Eng. Inform. 2012, 26, 529–538. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, W.; Ma, Y. A shortest path method for sequential change propagations in complex engineering design processes. AI EDAM 2016, 30, 107–121. [Google Scholar] [CrossRef]
- Li, M.; Sheng, J.; Li, Y.; Qi, W. Multi-objective path optimization for design change propagation on complex product. Mach. Des. Manuf. 2020, 6, 294–297. [Google Scholar]
- Zheng, C.; Bricogne, M.; Le Duigou, J.; Eynard, B. Survey on mechatronic engineering: A focus on design methods and product models. Adv. Eng. Inform. 2014, 28, 241–257. [Google Scholar] [CrossRef] [Green Version]
- Hehenberger, P.; Poltschak, F.; Zeman, K.; Amrhein, W. Hierarchical design models in the mechatronic product development process of synchronous machines. Mechatronics 2010, 20, 864–875. [Google Scholar] [CrossRef]
- Suh, N.P.; Suh, N.P. Axiomatic Design: Advances and Applications; Oxford University Press: New York, NY, USA, 2001. [Google Scholar]
- Tang, D.; Zhu, R.; Dai, S.; Zhang, G. Enhancing axiomatic design with design structure matrix. Concurr. Eng. 2009, 17, 129–137. [Google Scholar] [CrossRef]
- Browning, T.R. Design structure matrix extensions and innovations: A survey and new opportunities. IEEE Trans. Eng. Manag. 2015, 63, 27–52. [Google Scholar] [CrossRef]
- Browning, T.R. Applying the design structure matrix to system decomposition and integration problems: A review and new directions. IEEE Trans. Eng. Manag. 2001, 48, 292–306. [Google Scholar] [CrossRef] [Green Version]
- Steward, D.V. Systems Analysis and Management: Structure, Strategy, and Design; Petrocelli Books: New York, NY, USA, 1981. [Google Scholar]
- Eppinger, S.D.; Browning, T.R. Design Structure Matrix Methods and Applications; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Dong, Q.; Whitney, D.E. Designing a requirement driven product development process. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2001; pp. 11–20. [Google Scholar]
- Janthong, N.; Brissaud, D.; Butdee, S. Integration matrix to support technology evolution in (re) design of complex products. In Proceedings of the 2010 IEEE International Conference on Management of Innovation & Technology, Singapore, 2–5 June 2010; pp. 485–490. [Google Scholar]
- Keller, R.; Alink, T.; Pfeifer, C.; Eckert, C.M.; Clarkson, P.J.; Albers, A. Product models in design: A combined use of two models to assess change risks. In DS 42, Proceedings of the ICED 2007, the 16th International Conference on Engineering Design, Paris, France, 28–31 July 2007; pp. 673–674. [Google Scholar]
- Plehn, C. A Method for Analyzing the Impact of Changes and Their Propagation in Manufacturing Systems; Herbert Utz Verlag: München, Germany, 2018. [Google Scholar]
- Huang, J. Combining entropy weight and TOPSIS method for information system selection. In Proceedings of the 2008 IEEE Conference on Cybernetics and Intelligent Systems, Chengdu, China, 21–24 September 2008; pp. 1281–1284. [Google Scholar]
- Li, X.; Wang, K.; Liu, L.; Xin, J.; Yang, H.; Gao, C. Application of the entropy weight and TOPSIS method in safety evaluation of coal mines. Procedia Eng. 2011, 26, 2085–2091. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Tian, D.; Yan, F. Effectiveness of entropy weight method in decision-making. Math. Probl. Eng. 2020, 1–5. [Google Scholar] [CrossRef]
- Chen, P. Effects of the entropy weight on TOPSIS. Expert Syst. Appl. 2021, 168, 114186. [Google Scholar] [CrossRef]
- Jung, S.; Asikoglu, O.; Simpson, T.W. A method to evaluate direct and indirect design dependencies between components in a product architecture. Res. Eng. Des. 2018, 29, 507–530. [Google Scholar] [CrossRef]
- Dobberfuhl, A.; Lange, M.W. Interfaces per module: Is there an ideal number? In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, San Diego, CA, USA, 30 August–2 September 2009; pp. 1373–1385. [Google Scholar]
- Li, Y.; Chu, X.; Chu, D.; Liu, Q. An integrated module partition approach for complex products and systems based on weighted complex networks. Int. J. Prod. Res. 2014, 52, 4608–4622. [Google Scholar] [CrossRef]
- Dong, C.; Yang, Y.; Chen, Q.; Wu, Z. A complex network-based response method for changes in customer requirements for design processes of complex mechanical products. Expert Syst. Appl. 2022, 199, 117124. [Google Scholar] [CrossRef]
- Giffin, M.; de Weck, O.; Bounova, G.; Keller, R.; Eckert, C.; Clarkson, P.J. Change propagation analysis in complex technical systems. J. Mech. Des. 2009, 131, 081001. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Li, Z.; He, C.; Liu, D.; Zou, G. An Integrated Method for Modular Design Based on Auto-Generated Multi-Attribute DSM and Improved Genetic Algorithm. Symmetry 2021, 14, 48. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interface Type | Notation | Definition of Interface Type |
|---|---|---|
| Attachment | A | A specific type of connector is needed for the structural connections between two components (e.g., bolts, screws, and rivets) |
| Spatial | S | Constraints relating to a component’s geometry and location in relation to other components |
| Power | P | Contrary to the communications and control interface, the electrical connection between the two components |
| Control and communication | C | Communication or control of one component’s state by another component through the exchange of signals or information between two components |
| Transfer | T | The flow of materials or power between components (e.g., water flow in a coffee maker, transfer of motion such as torque) |
| Field | F | The interaction between two components in which one component can generate heat, vibration, or magnetic field |
| No. | Component Name | No. | Component Name | No. | Component Name |
|---|---|---|---|---|---|
| 1. | Top plate | 18. | Bearing nuts | 35. | Digital I/O board |
| 2. | Side plate | 19. | C-ring | 36. | Analog output |
| 3. | Wheel bushing | 20. | Washer | 37. | Touch screen |
| 4. | Magnetic guide mounting | 21. | Chassis base | 38. | Magnetic sensors |
| 5. | Rib support | 22. | Side cover | 39. | Motor drive controller |
| 6. | Washer lock bush | 23. | Rear-wheel mounting | 40. | Obstacle avoidance sensors |
| 7. | Bottom plate | 24. | Front cover | 41. | Buttons |
| 8. | Wheel | 25. | Upper front cover | 42. | Steering lamp |
| 9. | Wheel outer | 26. | Rear cover | 43. | Alarm sensors |
| 10. | Key | 27. | Upper rear cover | 44. | Bumper switch |
| 11. | Bush rotor | 28. | Middle top cover | 45. | Buzzer |
| 12. | Bearing housing | 29. | Front-wheel mounting | 46. | Motor |
| 13. | End cap | 30. | Sensor mounting | 47. | Master controller |
| 14. | Rotor mounting | 31. | Bumper set | 48 | sm_Movement |
| 15. | Stopper rotation | 32. | Battery mounting | 49 | sm_Safety |
| 16. | Stopper cap | 33. | Battery | 50 | sm_Detection Path |
| 17. | Angel bearing | 34. | Power board |
| No. | Component Relationships | Type of Interface | Total Weight Interface | Level of Interface | WCS | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Source | Target | A | S | P | C | T | F | ||||
| 1 | 2 | 1 | 4 | 1 | 5 | 2 | 10 | ||||
| 2 | 3 | 46 | 1 | 1 | 1 | 1 | |||||
| 3 | 4 | 1 | 2 | 1 | 3 | 2 | 6 | ||||
| 4 | 5 | 1 | 2 | 1 | 3 | 2 | 6 | ||||
| 5 | 5 | 2 | 2 | 1 | 3 | 2 | 6 | ||||
| 6 | 6 | 3 | 1 | 1 | 1 | 1 | |||||
| 7 | 7 | 2 | 2 | 1 | 3 | 2 | 6 | ||||
| 8 | 8 | 3 | 6 | 1 | 1 | 8 | 3 | 24 | |||
| 9 | 9 | 8 | 1 | 1 | 2 | 2 | 4 | ||||
| 10 | 10 | 3 | 1 | 1 | 2 | 2 | 4 | ||||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 73 | 46 | 3 | 1 | 1 | 2 | 2 | 4 | ||||
| 74 | 46 | 7 | 1 | 1 | 1 | 1 | |||||
| 75 | 46 | 39 | 1 | 1 | 2 | 2 | 4 | ||||
| 76 | 47 | 21 | 4 | 1 | 5 | 2 | 10 | ||||
| 77 | 47 | 35 | 1 | 1 | 1 | 1 | |||||
| 78 | 47 | 36 | 1 | 1 | 1 | 1 | |||||
| 79 | 48 | 47 | 1 | 1 | 1 | 1 | |||||
| 80 | 49 | 47 | 1 | 1 | 1 | 1 | |||||
| 81 | 50 | 47 | 1 | 1 | 1 | 1 | |||||
| Part No. | In-Degree | Out-Degree | CPI | Part No. | In-Degree | Out-Degree | CPI | Part No. | In-Degree | Out-Degree | CPI |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1. | 34 | 0 | −1.000 | 18. | 0 | 2 | 1.000 | 35. | 7 | 6 | −0.077 |
| 2. | 22 | 10 | −0.375 | 19. | 0 | 2 | 1.000 | 36. | 2 | 4 | 0.333 |
| 3. | 33 | 1 | −0.941 | 20. | 1 | 1 | 0.000 | 37. | 1 | 2 | 0.333 |
| 4. | 2 | 6 | 0.500 | 21. | 125 | 18 | −0.748 | 38. | 1 | 3 | 0.500 |
| 5. | 0 | 12 | 1.000 | 22. | 28 | 20 | −0.167 | 39. | 7 | 2 | −0.556 |
| 6. | 0 | 1 | 1.000 | 23. | 0 | 10 | 1.000 | 40. | 0 | 2 | 1.000 |
| 7. | 1 | 6 | 0.714 | 24. | 18 | 20 | 0.053 | 41. | 0 | 2 | 1.000 |
| 8. | 4 | 24 | 0.714 | 25. | 13 | 24 | 0.297 | 42. | 1 | 1 | 0.000 |
| 9. | 0 | 4 | 1.000 | 26. | 0 | 14 | 1.000 | 43. | 0 | 2 | 1.000 |
| 10. | 0 | 4 | 1.000 | 27. | 0 | 10 | 1.000 | 44. | 0 | 8 | 1.000 |
| 11. | 7 | 18 | 0.440 | 28. | 0 | 18 | 1.000 | 45. | 1 | 6 | 0.714 |
| 12. | 2 | 10 | 0.667 | 29. | 0 | 10 | 1.000 | 46. | 1 | 19 | 0.900 |
| 13. | 0 | 2 | 1.000 | 30. | 1 | 6 | 0.714 | 47. | 7 | 12 | 0.263 |
| 14. | 40 | 0 | −1.000 | 31. | 0 | 7 | 1.000 | 48 | 0 | 1 | 1.000 |
| 15. | 0 | 4 | 1.000 | 32. | 1 | 6 | 0.714 | 49 | 0 | 1 | 1.000 |
| 16. | 0 | 2 | 1.000 | 33. | 0 | 2 | 1.000 | 50 | 0 | 1 | 1.000 |
| 17. | 2 | 5 | 0.429 | 34. | 1 | 12 | 0.846 |
| Path No. | NCR | CMNR | CMR | Path No. | NCR | CMNR | CMR | Path No. | NCR | CMNR | CMR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.006 | −1.000 | 0.238 | 18 | 0.044 | 0.250 | 0.483 | 35 | 0.132 | −0.007 | 2.531 |
| 2 | 0.019 | −0.188 | 0.462 | 19 | 0.069 | 0.167 | 0.839 | 36 | 0.132 | 0.030 | 2.531 |
| 3 | 0.094 | −0.118 | 2.231 | 20 | 0.031 | 0.000 | 0.469 | 37 | 0.145 | 0.028 | 2.552 |
| 4 | 0.019 | 0.250 | 0.294 | 21 | 0.019 | −0.374 | 1.280 | 38 | 0.170 | 0.036 | 2.853 |
| 5 | 0.031 | 0.333 | 0.545 | 22 | 0.031 | −0.056 | 1.615 | 39 | 0.031 | −0.185 | 1.343 |
| 6 | 0.107 | 0.111 | 2.238 | 23 | 0.031 | 0.333 | 1.350 | 40 | 0.157 | 0.077 | 2.594 |
| 7 | 0.031 | 0.238 | 0.510 | 24 | 0.057 | 0.011 | 2.140 | 41 | 0.145 | 0.083 | 2.545 |
| 8 | 0.107 | 0.079 | 2.427 | 25 | 0.057 | 0.059 | 2.140 | 42 | 0.069 | 0.000 | 2.154 |
| 9 | 0.119 | 0.100 | 2.455 | 26 | 0.044 | 0.250 | 1.713 | 43 | 0.145 | 0.083 | 2.545 |
| 10 | 0.107 | 0.111 | 2.259 | 27 | 0.031 | 0.333 | 1.350 | 44 | 0.145 | 0.083 | 2.587 |
| 11 | 0.019 | 0.220 | 0.455 | 28 | 0.031 | 0.333 | 1.406 | 45 | 0.031 | 0.238 | 1.329 |
| 12 | 0.019 | 0.333 | 0.322 | 29 | 0.031 | 0.333 | 1.350 | 46 | 0.094 | 0.113 | 2.231 |
| 13 | 0.069 | 0.167 | 0.839 | 30 | 0.069 | 0.119 | 2.189 | 47 | 0.132 | 0.024 | 2.531 |
| 14 | 0.006 | −1.000 | 0.280 | 31 | 0.069 | 0.167 | 2.189 | 48 | 0.145 | 0.083 | 2.538 |
| 15 | 0.019 | 0.500 | 0.308 | 32 | 0.031 | 0.238 | 1.329 | 49 | 0.145 | 0.083 | 2.538 |
| 16 | 0.019 | 0.500 | 0.252 | 33 | 0.220 | 0.056 | 3.028 | 50 | 0.145 | 0.083 | 2.538 |
| 17 | 0.057 | 0.086 | 0.825 | 34 | 0.195 | 0.053 | 2.965 |
| Path No. | Standardized Score | Rank | Path No. | Standardized Score | Rank | Path No. | Standardized Score | Rank |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.000 | 50 | 18 | 0.238 | 43 | 35 | 0.802 | 14 |
| 2 | 0.172 | 48 | 19 | 0.297 | 36 | 36 | 0.805 | 12 |
| 3 | 0.700 | 22 | 20 | 0.201 | 47 | 37 | 0.812 | 11 |
| 4 | 0.217 | 46 | 21 | 0.377 | 35 | 38 | 0.890 | 3 |
| 5 | 0.258 | 39 | 22 | 0.506 | 27 | 39 | 0.410 | 34 |
| 6 | 0.719 | 18 | 23 | 0.449 | 29 | 40 | 0.829 | 4 |
| 7 | 0.240 | 42 | 24 | 0.680 | 25 | 41 | 0.815 | 6 |
| 8 | 0.777 | 16 | 25 | 0.683 | 24 | 42 | 0.684 | 23 |
| 9 | 0.787 | 15 | 26 | 0.556 | 26 | 43 | 0.815 | 6 |
| 10 | 0.725 | 17 | 27 | 0.449 | 29 | 44 | 0.827 | 5 |
| 11 | 0.230 | 45 | 28 | 0.466 | 28 | 45 | 0.436 | 32 |
| 12 | 0.230 | 44 | 29 | 0.449 | 29 | 46 | 0.716 | 19 |
| 13 | 0.297 | 36 | 30 | 0.703 | 21 | 47 | 0.805 | 13 |
| 14 | 0.014 | 49 | 31 | 0.705 | 20 | 48 | 0.813 | 8 |
| 15 | 0.251 | 40 | 32 | 0.436 | 32 | 49 | 0.813 | 8 |
| 16 | 0.246 | 41 | 33 | 0.914 | 1 | 50 | 0.813 | 8 |
| 17 | 0.284 | 38 | 34 | 0.910 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Assawarungsri, T.; Janthong, N. An Integration Matrix for Investigating the Impact of Design Changes in Mechatronic Products. Designs 2023, 7, 16. https://doi.org/10.3390/designs7010016
Assawarungsri T, Janthong N. An Integration Matrix for Investigating the Impact of Design Changes in Mechatronic Products. Designs. 2023; 7(1):16. https://doi.org/10.3390/designs7010016
Chicago/Turabian StyleAssawarungsri, Tossaporn, and Nattawut Janthong. 2023. "An Integration Matrix for Investigating the Impact of Design Changes in Mechatronic Products" Designs 7, no. 1: 16. https://doi.org/10.3390/designs7010016
APA StyleAssawarungsri, T., & Janthong, N. (2023). An Integration Matrix for Investigating the Impact of Design Changes in Mechatronic Products. Designs, 7(1), 16. https://doi.org/10.3390/designs7010016