
Quantum Deep Learning for Fast Switching of Full-Bridge Power Converters



Abstract
:1. Introduction and Preliminaries
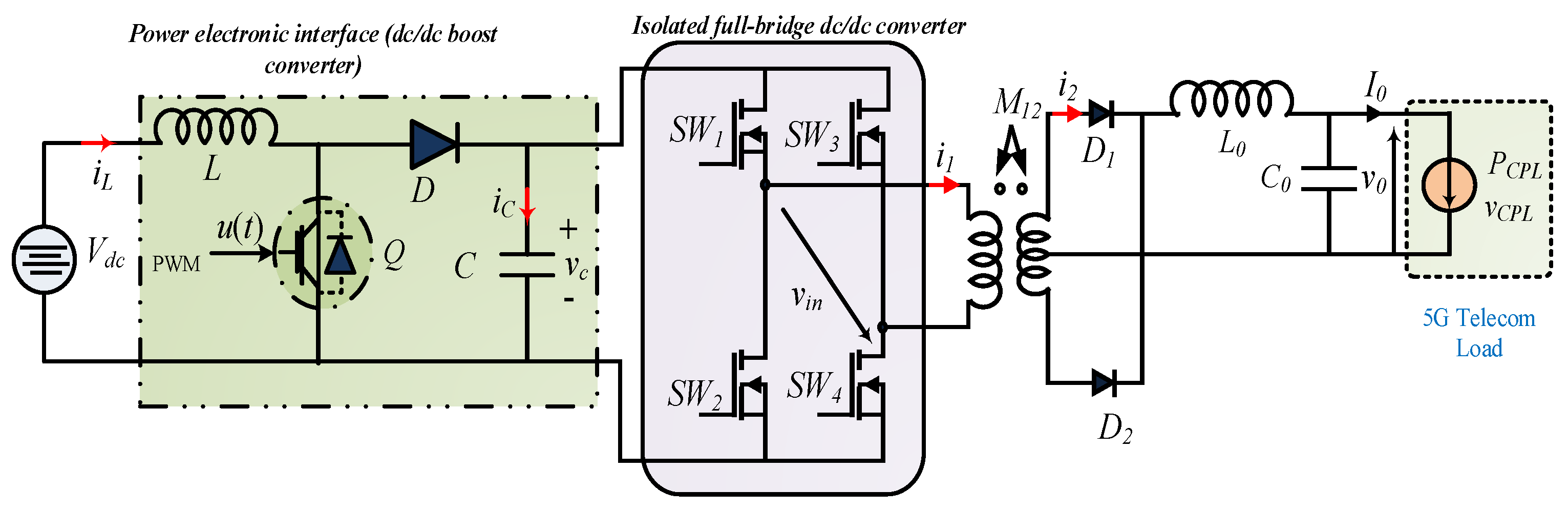
- A full-bridge boost converter feeding constant power loads is modeled in the form of microgrids. For this purpose, the average dynamics of the power interface system are provided.
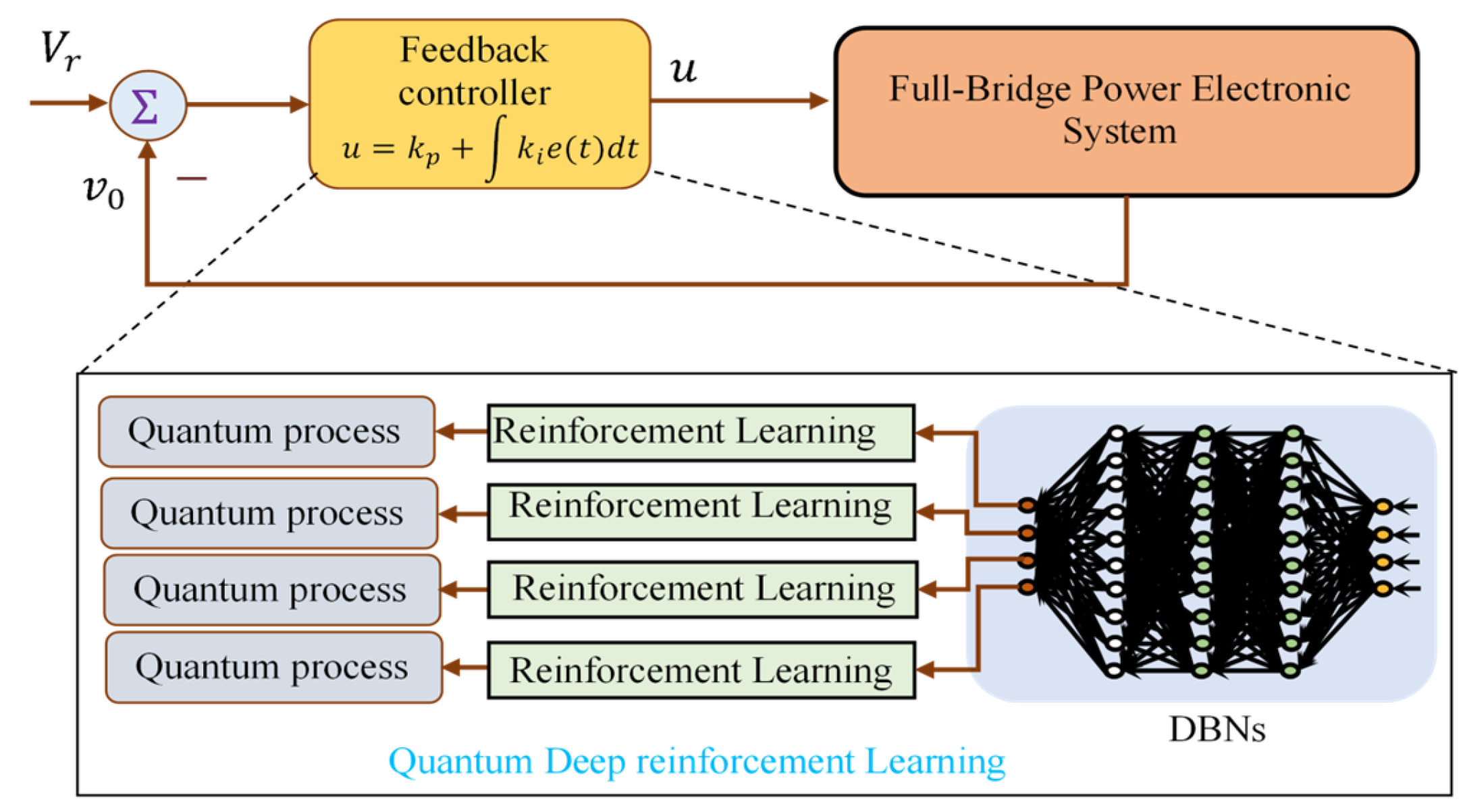
- Quantum computation based on deep reinforcement learning is developed to control the FB power converter.
- Extensive examinations and comparative analyses are conducted to validate the efficiency of the proposed FB DC-DC power converter.
- HiL tests based on OPAL-RT are developed to test the feasibility of the proposed QDRL algorithm.
2. Dynamic Model of Full Bridge Converter under CPL
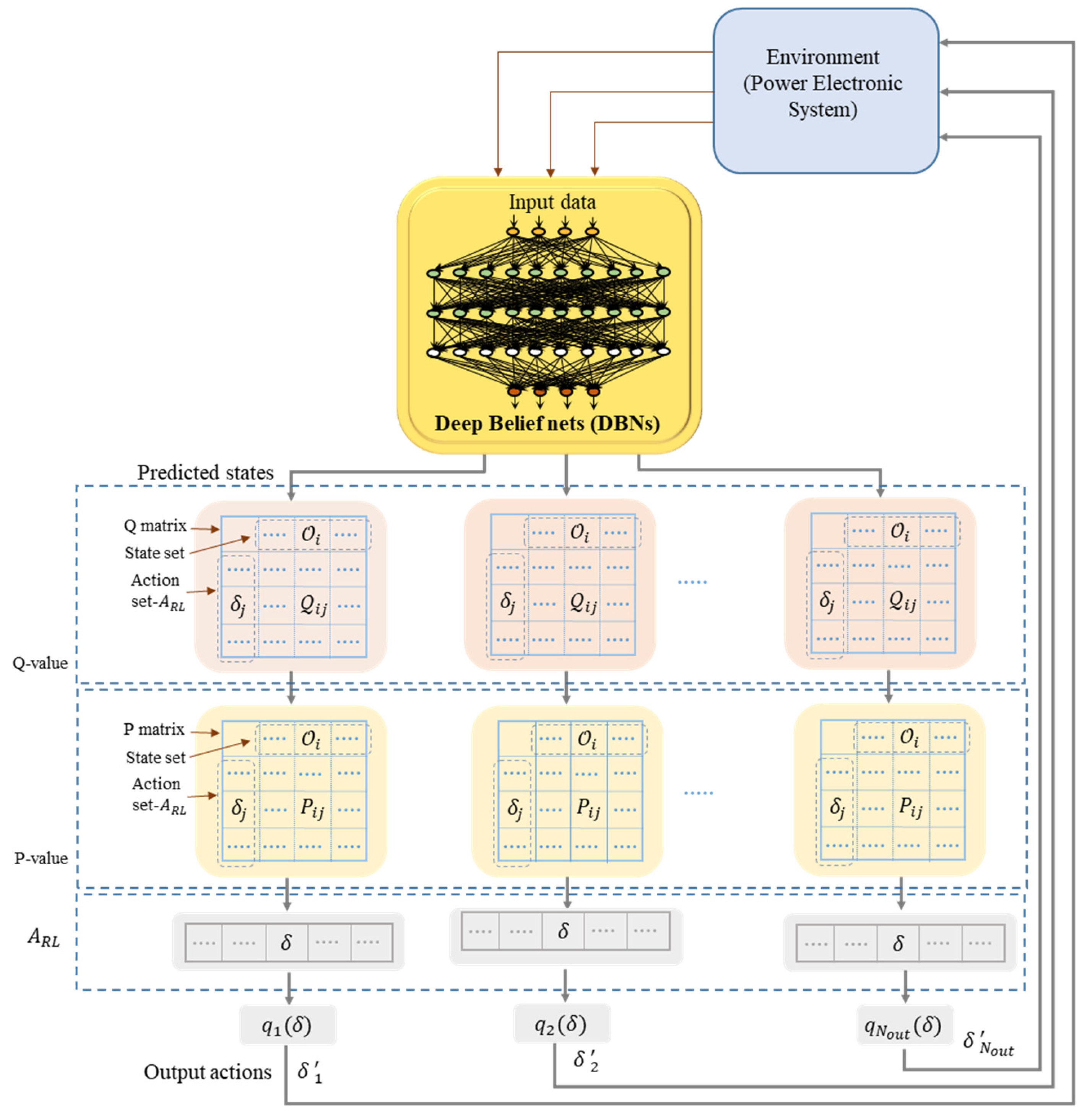
3. Quantum Deep Reinforcement Learning for FB Power Converter
3.1. Principal of RL
3.2. Deep Belief Nets (BBNs) Based on Restricted Boltzmann Machines
3.3. Quantum Computation
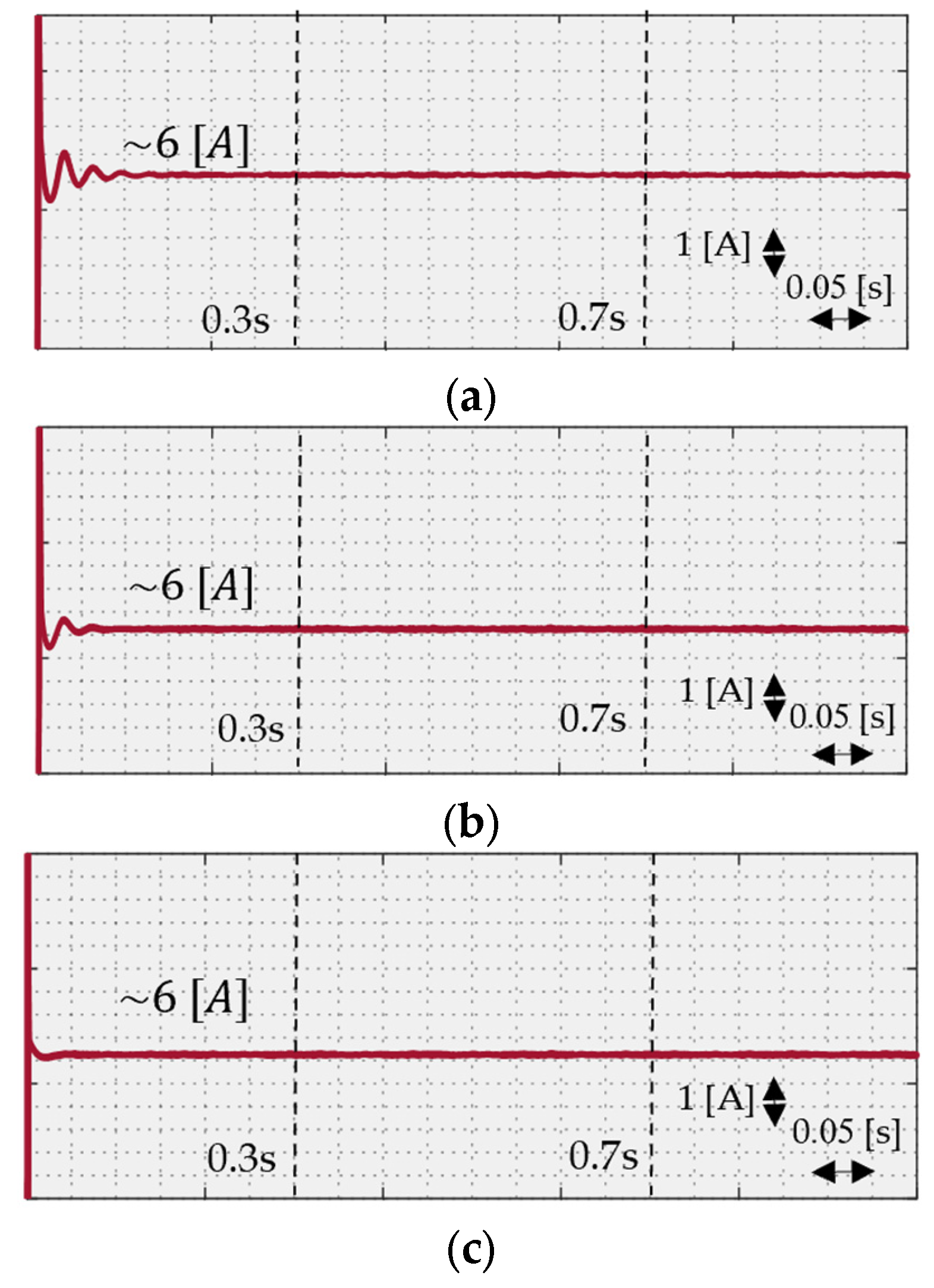
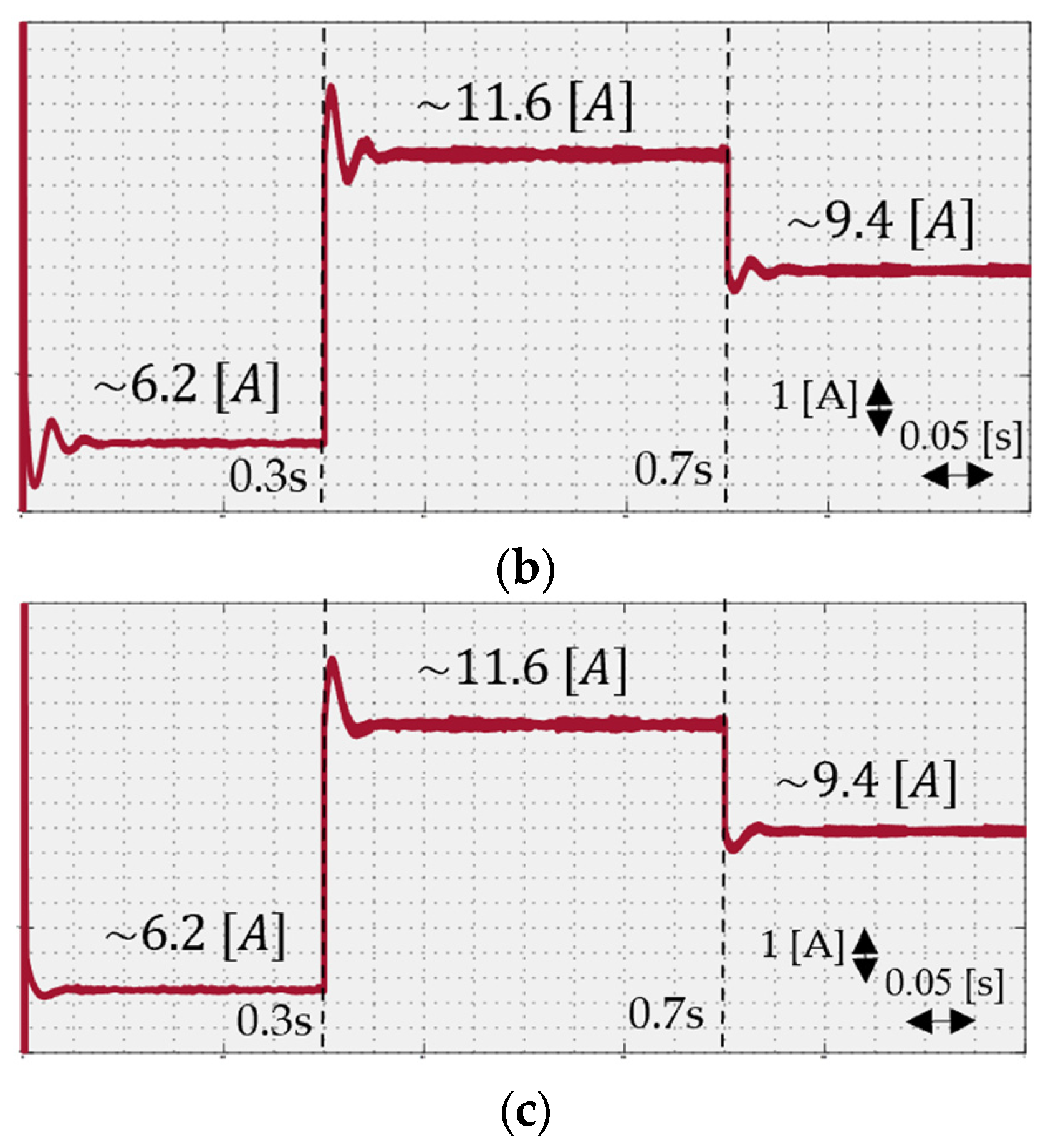
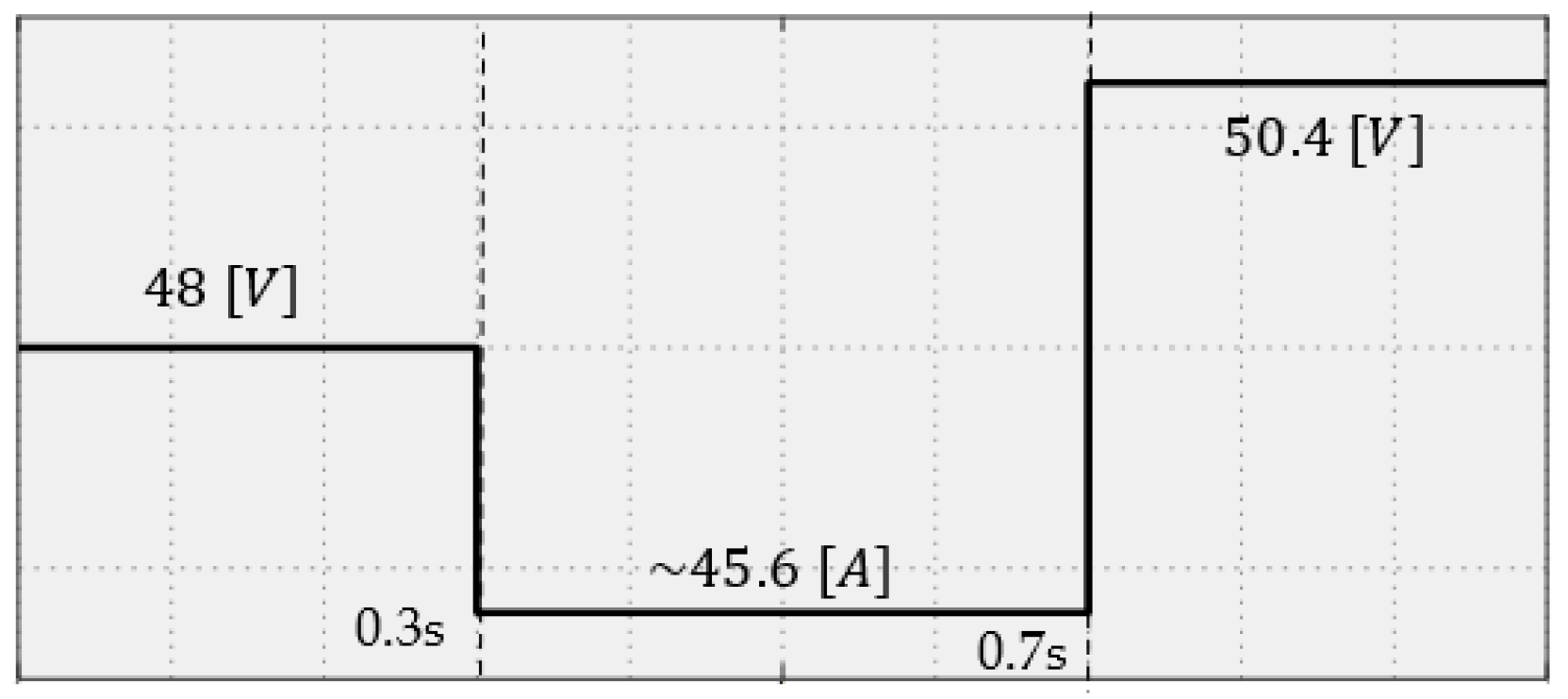
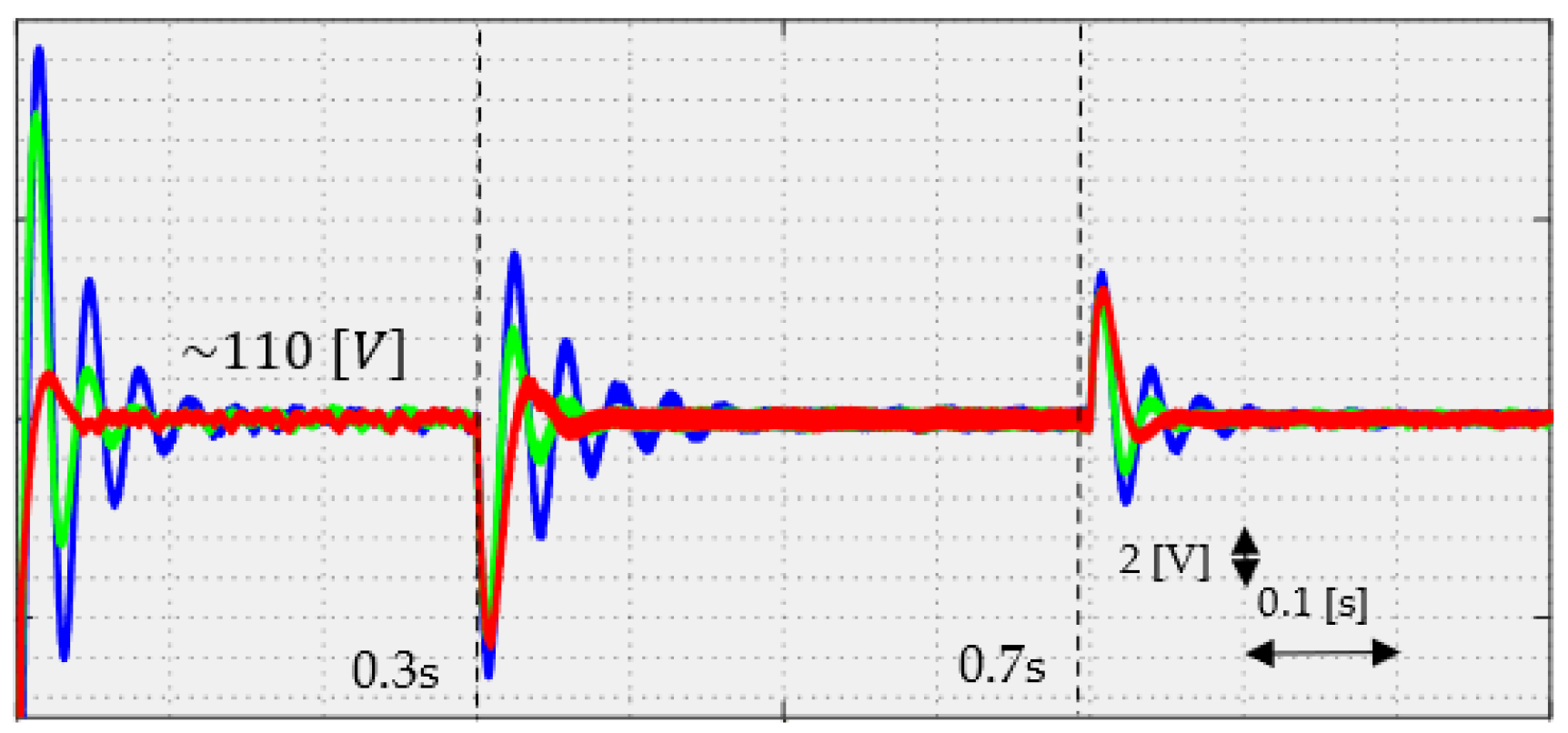
4. Experimental Results
5. The Justification and Advantages of the Proposed Scheme
- (i)
- In comparison with model-based schemes (MPC, backstepping, SMC, etc.), which need model identification, a model-free QDRL learning scheme was developed to regulate the coefficients of the feedback controller.
- (ii)
- Since the QDRL-based controller was developed in a model-free framework, the proposed QDRL scheme can be applied to a wide range of power electronic test systems.
- (iii)
- In comparison to conventional controllers, which only have optimal performance at the operating condition, the proposed controller was adaptively adjusted by QDRL, which ensured the high efficiency of the FB DC-DC boost converter for all changes to the CPLs.
- (iv)
- While ideal CPLs were often considered in previous works, in this study, a time-varying CPL was applied to evaluate the flexibility and effectiveness of the suggested QDRL-based controller.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| List of abbreviations | |
| MG | Microgrid |
| DCMG | DC microgrid |
| ACMG | AC microgrid |
| WBG | Wide-bandgap |
| SIC | Silicon carbide |
| GAN | Gallium nitride |
| PI | Proportional-integral |
| SMC | Sliding mode control |
| MPC | Model predictive control |
| PBC | Passivity-based control |
| FCS-MPC | Finite control set MPC |
| DNN | Deep neural network |
| RBM | Restricted Boltzmann machine |
| CPL | Constant power load |
| PV | Photovoltaic |
| NDO | Nonlinear disturbance observer |
| DRL | Deep reinforcement learning |
| QDRL | Quantum deep reinforcement learning |
| QER | Quantum-inspired experience replay |
| WDRL | Quantum DRL |
| CDRL | Classic DRL |
| FB | Full-bridge |
| IAE | Integral absolute error |
| ITAE | Integral time absolute error |
| MAE | Mean absolute error |
| RMSE | Root mean square error |
| List of symbols | |
| Output voltage | |
| Reference of output voltage | |
| Current of CPL | |
| Power of CPL | |
| Learning factor of _Q-value | |
| Discount factor of Q-value | |
| Updated factor of p-value | |
| Set of action space | |
| Current state | |
| Action | |
| Predicted next state | |
| , | Constant factors of the reward function |
| Voltage error | |
| Weight matrix of RBM | |
| Hidden layer | |
| Visible layer | |
| Weight component | |
| Bias weights of visible layer | |
| Bias weights of hidden layer | |
| Number of hidden layers | |
| Number of hidden units | |
| Output probability of QDRL | |
| Quantum bit count | |
References
- Pérez-Lombard, L.; Ortiz, J.; Pout, C. A review on buildings energy consumption information. Energy Build. 2008, 40, 394–398. [Google Scholar]
- Ansari, S.; Chandel, A.; Tariq, M. A Comprehensive Review on Power Converters Control and Control Strategies of AC/DC Microgrid. IEEE Access 2020, 9, 17998–18015. [Google Scholar]
- San, G.; Zhang, W.; Guo, X.; Hua, C.; Xin, H.; Blaabjerg, F. Large-disturbance stability for power-converter-dominated microgrid: A review. Renew. Sustain. Energy Rev. 2020, 127, 109859. [Google Scholar]
- Xu, L.; Guerrero, J.M.; Lashab, A.; Wei, B.; Bazmohammadi, N.; Vasquez, J.C.; Abusorrah, A. A Review of DC Shipboard Microgrids—Part I: Power Architectures, Energy Storage, and Power Converters. IEEE Trans. Power Electron. 2021, 37, 5155–5172. [Google Scholar]
- Hu, J.; Shan, Y.; Cheng, K.W.; Islam, S. Overview of power converter control in microgrids—Challenges, advances, and future trends. IEEE Trans. Power Electron. 2022, 37, 9907–9922. [Google Scholar]
- Bencherif, H.; Dehimi, L.; Pezzimenti, F.; De Martino, G.; Della Corte, F.G. Multiobjective optimization of design of 4H-SiC power MOSFETs for specific applications. J. Electron. Mater. 2019, 48, 3871–3880. [Google Scholar]
- Jon, A.A.; Kessy, L.P.; Dominik, B.; Johann, W.K.; Matthias, J.K. Experimental characterization of silicon and gallium nitride 200 V power semiconductors for modular/multi-level converters using advanced measurement techniques. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 2238–2254. [Google Scholar]
- Jin, W.; Lee, A.T.L.; Tan, S.C.; Hui, S.Y. A gallium nitride (GaN)-based single-inductor multiple-output (SIMO) inverter with multi-frequency AC outputs. IEEE Trans. Power Electron. 2019, 34, 10856–10873. [Google Scholar]
- Kaplan, O.; Bodur, F. Second-order sliding mode controller design of buck converter with constant power load. Int. J. Control 2022, 96, 1210–1226. [Google Scholar]
- Marcillo, K.E.L.; Guingla, D.A.P.; Barra, W.; De Medeiros, R.L.P.; Rocha, E.M.; Benavides, D.A.V.; Nogueira, F.G. Interval robust controller to minimize oscillations effects caused by constant power load in a DC multi-converter buck-buck system. IEEE Access 2019, 7, 26324–26342. [Google Scholar]
- Khooban, M.H. Smartenance DC-DC On-Board Power Converters. IEEE Trans. Circuits Syst. II Express Briefs 2022, 70, 191–195. [Google Scholar]
- Farsizadeh, H.; Gheisarnejad, M.; Mosayebi, M.; Rafiei, M.; Khooban, M.H. An Intelligent and Fast Controller for DC/DC Converter Feeding CPL in a DC Microgrid. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 1104–1108. [Google Scholar]
- Boukerdja, M.; Chouder, A.; Hassaine, L.; Bouamama, B.O.; Issa, W.; Louassaa, K. H∞ based control of a DC/DC buck converter feeding a constant power load in uncertain DC microgrid system. ISA Trans. 2020, 105, 278–295. [Google Scholar]
- Alipour, M.; Zarei, J.; Razavi-Far, R.; Saif, M.; Mijatovic, N.; Dragicevic, T. Observer-based backstepping sliding mode control design for microgrids feeding a constant power load. IEEE Trans. Ind. Electron. 2022, 70, 465–473. [Google Scholar]
- Xu, Q.; Yan, Y.; Zhang, C.; Dragicevic, T.; Blaabjerg, F. An offset-free composite model predictive control strategy for DC/DC buck converter feeding constant power loads. IEEE Trans. Power Electron. 2019, 35, 5331–5342. [Google Scholar]
- Gheisarnejad, M.; Mohammadzadeh, A.; Khooban, M.-H. Model Predictive Control Based Type-3 Fuzzy Estimator for Voltage Stabilization of DC Power Converters. IEEE Trans. Ind. Electron. 2021, 69, 13849–13858. [Google Scholar]
- He, W.; Namazi, M.M.; Koofigar, H.R.; Amirian, M.A.; Blaabjerg, F. Stabilization of DC–DC buck converter with unknown constant power load via passivity-based control plus proportion-integration. IET Power Electron. 2021, 14, 2597–2609. [Google Scholar]
- Hassan, M.A.; Su, C.-L.; Chen, F.-Z.; Lo, K.-Y. Adaptive Passivity-Based Control of a DC–DC Boost Power Converter Supplying Constant Power and Constant Voltage Loads. IEEE Trans. Ind. Electron. 2021, 69, 6204–6214. [Google Scholar]
- Karami, Z.; Shafiee, Q.; Sahoo, S.; Yaribeygi, M.; Bevrani, H.; Dragicevic, T. Hybrid model predictive control of DC–DC boost converters with constant power load. IEEE Trans. Energy Convers. 2020, 36, 1347–1356. [Google Scholar]
- Ullah, N.; Asghar, M.; Khattak, A.; Rafiq, M.M. Comparison of integer and fractional order robust controllers for DC/DC converter feeding constant power load in a DC microgrid. Sustain. Energy Grids Netw. 2017, 12, 1–9. [Google Scholar]
- Huang, H.-Y.; Broughton, M.; Mohseni, M.; Babbush, R.; Boixo, S.; Neven, H.; McClean, J.R. Power of data in quantum machine learning. Nat. Commun. 2021, 12, 2631. [Google Scholar]
- Wu, S.L.; Yoo, S. Challenges and opportunities in quantum machine learning for high-energy physics. Nat. Rev. Phys. 2022, 4, 143–144. [Google Scholar]
- Wei, Q.; Ma, H.; Chen, C.; Dong, D. Deep reinforcement learning with quantum-inspired experience replay. IEEE Trans. Cybern. 2021, 52, 9326–9338. [Google Scholar]
- Yin, L.; Chen, L.; Liu, D.; Huang, X.; Gao, F. Quantum deep reinforcement learning for rotor side converter control of double-fed induction generator-based wind turbines. Eng. Appl. Artif. Intell. 2021, 106, 104451. [Google Scholar]
- Chellaswamy, C.; Geetha, T.; Selvan, P.T.; Arunkumar, A. 6-phase DFIG for wind energy conversion system: A hybrid approach. Sustain. Energy Technol. Assess. 2022, 53, 102497. [Google Scholar]
- Li, J.-A.; Dong, D.; Wei, Z.; Liu, Y.; Pan, Y.; Nori, F.; Zhang, X. Quantum reinforcement learning during human decision-making. Nat. Hum. Behav. 2020, 4, 294–307. [Google Scholar]
- Yan, R.; Wang, Y.; Xu, Y.; Dai, J. A Multiagent Quantum Deep Reinforcement Learning Method for Distributed Frequency Control of Islanded Microgrids. IEEE Trans. Control Netw. Syst. 2022, 9, 1622–1632. [Google Scholar]
- Baum, Y.; Amico, M.; Howell, S.; Hush, M.; Liuzzi, M.; Mundada, P.; Merkh, T.; Carvalho, A.R.; Biercuk, M.J. Experimental deep reinforcement learning for error-robust gate-set design on a superconducting quantum computer. PRX Quantum 2021, 2, 040324. [Google Scholar]
- Aghdam, M.H.; Thiringer, T. Comparison of SiC and Si power semiconductor devices to be used in 2.5 kW DC/DC converter. In Proceedings of the 2009 International Conference on Power Electronics and Drive Systems (PEDS), Taipei, Taiwan, 2–5 November 2009; pp. 1035–1040. [Google Scholar]
- Gheisarnejad, M.; Mohammadzadeh, A.; Farsizadeh, H.; Khooban, M.-H. Stabilization of 5G telecom converter-based deep type-3 fuzzy machine learning control for telecom applications. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 544–548. [Google Scholar]
- Xu, Q.; Zhang, C.; Wen, C.; Wang, P. A novel composite nonlinear controller for stabilization of constant power load in DC microgrid. IEEE Trans. Smart Grid 2017, 10, 752–761. [Google Scholar]
- Wang, G.; Qiao, J.; Bi, J.; Jia, Q.-S.; Zhou, M. An adaptive deep belief network with sparse restricted Boltzmann machines. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 4217–4228. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Inductance of boost converter, | 1 × 10−3 H | Inductance of output filter, | 5.3 × 10−6 H |
| Capacitor of boost converter, | 0.9 × 10−3 F | Capacitor of output converter, | 2.09 × 10−6 F |
| Input voltage, | Reference voltage, . | 110 [V] |
| Performance Index | Classic PI Controller | SMC Scheme | Proposed QDRL Controller | |||
|---|---|---|---|---|---|---|
| Case1 | Case2 | Case1 | Case2 | Case1 | Case2 | |
| IAE | 0.8839 | 1.2599 | 0.6415 | 0.8343 | 0.4889 | 0.6202 |
| ITSE | 0.1108 | 0.2705 | 0.0942 | 0.1728 | 0.0775 | 0.1410 |
| RMSE | 4.6063 | 4.8075 | 4.4450 | 4.5547 | 4.1177 | 4.2382 |
| MAE | 0.8867 | 1.2625 | 0.6443 | 0.8370 | 0.4916 | 0.6229 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gheisarnejad, M.; Khooban, M.-H. Quantum Deep Learning for Fast Switching of Full-Bridge Power Converters. Designs 2023, 7, 60. https://doi.org/10.3390/designs7030060
Gheisarnejad M, Khooban M-H. Quantum Deep Learning for Fast Switching of Full-Bridge Power Converters. Designs. 2023; 7(3):60. https://doi.org/10.3390/designs7030060
Chicago/Turabian StyleGheisarnejad, Meysam, and Mohammad-Hassan Khooban. 2023. "Quantum Deep Learning for Fast Switching of Full-Bridge Power Converters" Designs 7, no. 3: 60. https://doi.org/10.3390/designs7030060
APA StyleGheisarnejad, M., & Khooban, M. -H. (2023). Quantum Deep Learning for Fast Switching of Full-Bridge Power Converters. Designs, 7(3), 60. https://doi.org/10.3390/designs7030060