Reliability Analysis of Intersection Sight Distance at Roundabouts



Abstract
:1. Introduction
2. Deterministic ISD with Nonlinear Deceleration
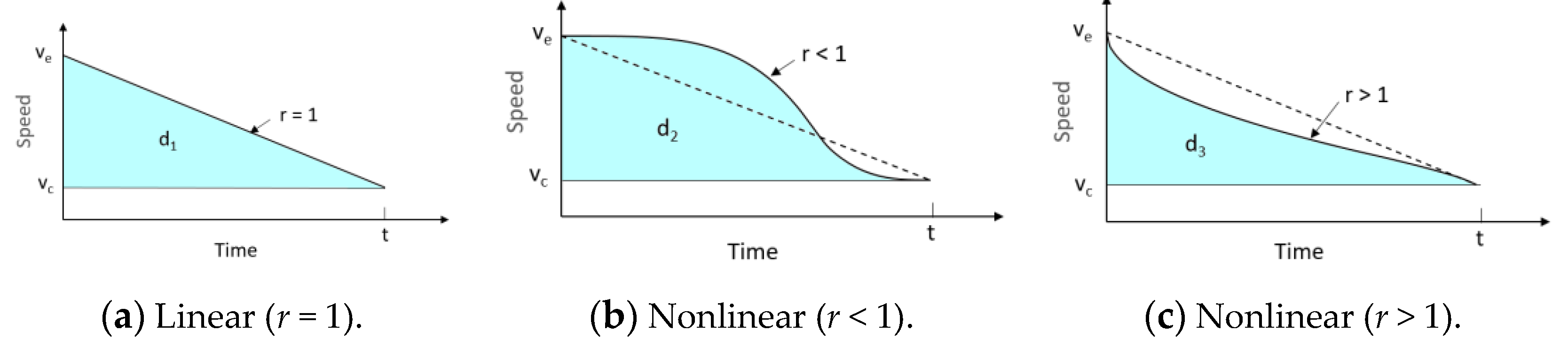
2.1. Modeling Nonlinear Deceleration Profile
2.2. Formulas for Sight Distance Legs
3. Proposed Reliability Method
3.1. FOSM Reliability Method
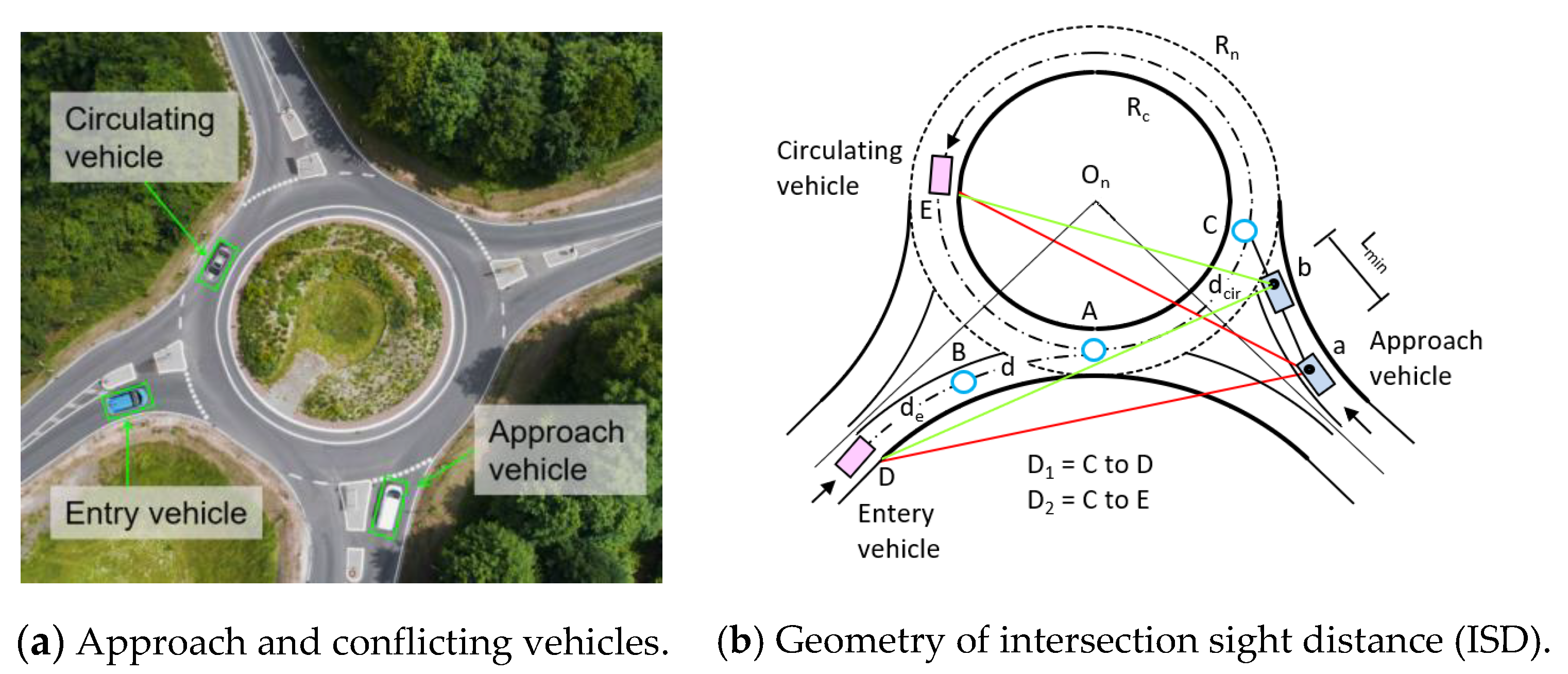
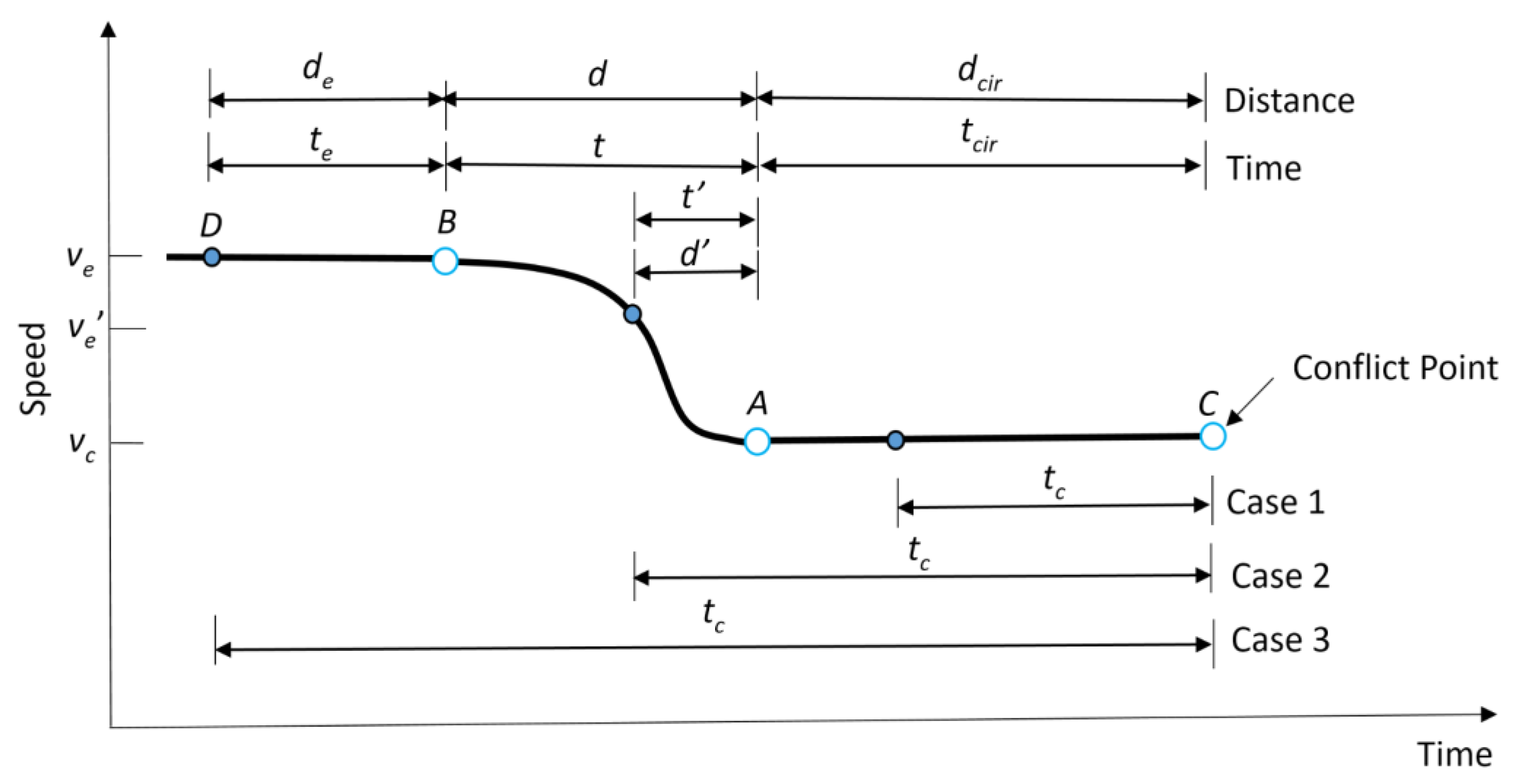
3.2. Reliability Analysis of ISD
3.2.1. Distance D1
3.2.2. Distance D2
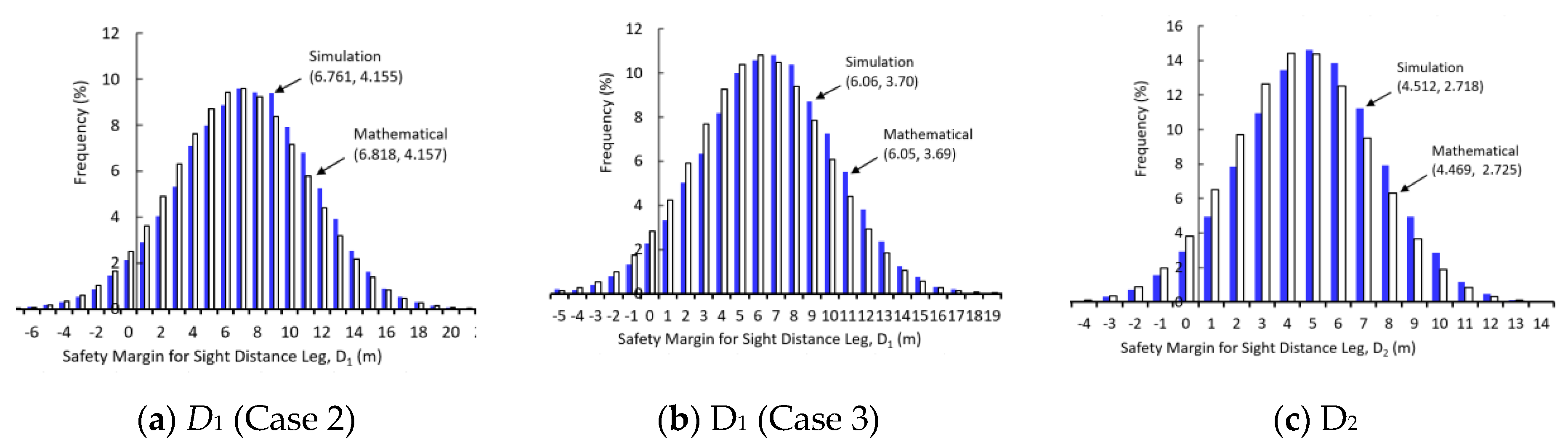
3.3. Verification
4. Application
4.1. Data Preparation
4.2. Design Values of ISD
4.3. Lateral Clearance Needs: Special Case
4.4. Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| a | Deceleration rate of linear profile (m/s2) |
| a1, a2, a3 | Deceleration rates of nonlinear profile (m/s2) |
| CV | Coefficient of variation of all random variables |
| CVxi | Coefficient of variation of random variable xi |
| d | Deceleration distance (m) |
| dcir | Distance along the circulatory part of the path (m) |
| df | Decision variable for determining maximum lateral clearance |
| dL, dU | Lower and upper limits of the decision variable df |
| Distance of the sight distance leg on the entry approach (m) | |
| d’ | Deceleration distance corresponding to Case 2 (m) |
| D1 | Sight distance leg of the entry vehicle |
| D2 | Sight distance leg of the circulating vehicle |
| Length of D1 supplied | |
| Length of D2 supplied | |
| e | Superlevation of circulatory roadway |
| Expected value of D1 | |
| Exi | Extreme value corresponding to a certain percentile value of random variable xi |
| E[SM] | Mean of random variable SM |
| Pnc | Probability of non-compliance |
| Probability distribution function | |
| r | Deceleration shape parameter |
| R | Minimum radius of the entry or circulatory roadway |
| R1 | Entry radius (m) |
| Rc | Circulatory roadway radius (m) |
| SM | Safety margin |
| Time spent by the entry vehicle on the circulatory roadway (s) | |
| t | Deceleration time (s) |
| tc | Critical headway (s) |
| t’ | Deceleration time corresponding to d’ (s) |
| te | Time on the entry approach correspond to de (s) |
| var[SM] | Variance of random variable SM |
| ve, vc | Design speeds of entry and circulatory roadways, respectively (m/s) |
| Ve, Vc | Design speeds of entry and circulatory roadways, respectively (km/h) |
| wc | Circulatory roadway width (m) |
| w1 | Distance from the curb to the centerline of the road (m). |
| xi | Random variable, i = 1, 2, …, n. |
| z | Number of standard deviations of the normal distribution for a certain percentile value |
| Z | Objective function for lateral clearance |
| α | Angle between the line joining entry curve and inscribed circle centres and y-axis (45°) |
| Reliability index | |
| Φ(−β) | Area under the standard normal variate PDF from −∞ to −β |
| ρxi,xj | Pearson’s coefficient of correlation between xi and xj. |
| Central angle suspended by the entry vehicle path along the circulatory roadway | |
| μxi | Mean of random variable xi |
| σxi | Standard deviation of random variable xi |
| Variance of random variable xi, |
Appendix A. Probabilistic Conditions for Cases 1–3 of D1
References
- Rodegerdts, L.A.; Bansen, J.; Tiesler, C.; Knudsen, J.; Myers, E.; Johnson, M.; Moule, M.; Persaud, B.; Lyon, C.; Hallmark, S.; et al. Roundabouts: An Informational Guide; NCHRP Report 672; Transportation Research Board: Washington, DC, USA, 2010. [Google Scholar]
- Transportation Association of Canada. Geometric Design Guide for Canadian Roads; Transportation Association of Canada: Ottawa, ON, Canada, 2017. [Google Scholar]
- American Association of State Highway and Transportation Officials. A Policy on Geometric Design of Highway and Streets; AASHTO: Washington, DC, USA, 2018. [Google Scholar]
- Federal Highway Administration (FHWA). Intersection Safety Roundabouts; U.S. Department of Transportation: Washington, DC, USA, 2006.
- Government of Queensland (GQ). Road planning and design manual. In Roundabouts; Department of Transport and Main Roads: Queensland, Australia, 2013; Chapter 14. [Google Scholar]
- Department for Regional Development, Northern Ireland (DRDNI). Geometric Design of Roundabouts; DRDNI: Belfast, UK, 2007; Volume 6.
- Melchers, R.; Beck, A. Structural Reliability Analysis and Prediction, 3rd ed.; Wiley: New York, NY, USA, 2018. [Google Scholar]
- Navin, F. Safety factors for road design: Can they be estimated? Transp. Res. Rec. 1990, 1280, 181–189. [Google Scholar]
- Easa, S.M. Reliability-based design of intergreen interval at traffic signals. J. Transp. Eng. 1993, 119, 255–271. [Google Scholar] [CrossRef]
- Easa, S.M. Reliability-based design of sight distance at railroad crossings. Transp. Res. 1994, 28, 1–15. [Google Scholar] [CrossRef]
- Easa, S.M. Reliability approach to intersection sight distance design. Transp. Res. Rec. 2000, 1701, 42–52. [Google Scholar] [CrossRef]
- Fatema, T.; Hassan, Y. Probabilistic design of freeway entrance speed change lanes considering acceleration and gap acceptance behavior. Transp. Res. Rec. 2013, 2348, 30–37. [Google Scholar] [CrossRef]
- Hassan, Y.; Sarhan, M.E.; Salehi, M. Probabilistic model for design of freeway acceleration speed change lanes. Transp. Res. Rec. 2012, 2309, 3–11. [Google Scholar] [CrossRef]
- Ibrahim, S.; Sayed, T.; Ismail, K. Methodology for safety optimization of highway cross-sections for horizontal curves with restricted sight distance. Accid. Anal. Prev. 2012, 49, 476–485. [Google Scholar] [CrossRef]
- Ismail, S.; Sayed, T. Risk-based framework for accommodating uncertainty in highway geometric design. Can. J. Civ. Eng. 2009, 36, 743–753. [Google Scholar] [CrossRef]
- Greto, K.; Easa, S.M. Reliability-based design of truck escape ramps. Can. J. Civ. Eng. 2019, 47, 395–404. [Google Scholar] [CrossRef]
- Easa, S.M.; Cheng, J. Reliability analysis of minimum pedestrian green interval for traffic signals. J. Transp. Eng. 2013, 139, 651–659. [Google Scholar] [CrossRef]
- Easa, S.M.; Hussain, A. Reliability of sight distance at stop-control intersections. ICE Proc. Transp. 2016, 169, 138–147. [Google Scholar] [CrossRef]
- Hussain, A.; Easa, S.M. Reliability analysis of left-turn sight distance at signalized intersections. J. Transp. Eng. 2016, 142, 04015048. [Google Scholar] [CrossRef]
- Osama, A.; Sayed, T.; Easa, S.M. Framework for evaluating risk of limited sight distance for permitted left-turn movements: Case study. Can. J. Civ. Eng. 2016, 43, 369–377. [Google Scholar] [CrossRef] [Green Version]
- Richl, L.; Sayed, T. Evaluating the safety risk of narrow medians using reliability analysis. J. Transp. Eng. 2006, 132, 5. [Google Scholar] [CrossRef]
- De Santos-Berbel, C.; Essa, M.; Sayed, T.; Castro, M. Reliability-based analysis of sight distance modelling for traffic safety. J. Adv. Transp. 2017, 5612849. [Google Scholar] [CrossRef] [Green Version]
- Llorca, C.; Moreno, A.T.; Sayed, T.; García, A. Sight distance standards based on observational data risk evaluation of passing. Transp. Res. Rec. 2014, 2404, 18–26. [Google Scholar] [CrossRef]
- El-Khoury, J.; Hobeika, J. Incorporating uncertainty into the estimation of the passing sight distance requirements. Comput.-Aided Civ. Infrastruct. Eng. 2007, 22, 347–357. [Google Scholar] [CrossRef]
- Sarhan, M.; Hassan, Y. Three-dimensional, probabilistic highway design: Sight distance application. Transp. Res. Rec. 2008, 2060, 10–18. [Google Scholar] [CrossRef]
- Wood, J.S.; Donnell, E.T. Stopping sight distance and available sight distance: New model and reliability analysis comparison. Transp. Res. Rec. 2017, 2638, 1–9. [Google Scholar] [CrossRef]
- Andrade-Cataño, F.; de Santos-Berbel, C.; Castro, M. Reliability-based safety evaluation of headlight sight distance applied to road sag curve standards. IEEE Access 2020, 8, 43606–43617. [Google Scholar] [CrossRef]
- Faizi, J.; Easa, S.M. Reliability of stopping sight distance design at roundabouts. In Annual CSCE Conference; Canadian Society for Civil Engineering: Fredericton, NB, Canada, 2018; pp. 13–16. [Google Scholar]
- Wortman, R.H.; Fox, T.C. An evaluation of vehicle deceleration profiles. J. Adv. Transp. 1994, 28, 203–215. [Google Scholar] [CrossRef]
- Rodegerdts, L.A.; Blogg, M.; Wemple, E.; Myers, E.; Kyte, M.; Dixon, M.; List, G.; Flannery, A.; Troutbeck, R.; Brilon, W.; et al. Roundabouts in the United States; NCHRP Report 572; Transportation Research Board: Washington, DC, USA, 2007. [Google Scholar]
- Rodegerdts, L.A.; Malinge, A.; Marnell, P.S.; Beaird, S.G.; Kittelson, M.J.; Mereszczak, Y.S. Accelerating Roundabout Implementation in the United States: Volume I of VII—Assessment of Roundabout Capacity Models for the Highway Capacity Manual; FHWA-SA-15-070; Federal Highway Administration: Washington, DC, USA, 2015. [Google Scholar]
- Benjamin, J.R.; Cornell, C.A. Probability, Statistics, and Decision for Civil Engineers; McGraw-Hill: New York, NY, USA, 2014. [Google Scholar]
- Smith, G.N. Probability and Statistics in Civil Engineering: An Introduction; Nichols Pub. Co.: New York, NY, USA, 1986. [Google Scholar]
- Haukaas, T. Mean-Value First-Order Second-Moment Method (MVFOSM); University of British Columbia: Vancouver, BC, Canada, 2014. [Google Scholar]
- Easa, S.M. Design guidelines for symmetrical single-lane roundabouts based on intersection sight distance. J. Transp. Eng. Part A Syst. 2017, 143, 04017052. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference, Date | Features | Reliability Method | Design Element |
|---|---|---|---|
| Navin [8], 1990 | Reliability theory of highway geometric design. | FOSM | SD on HC and VC |
| Easa [9], 1993 | Probabilistic method for determining intergreen intervals at signalized intersections. | FOSM | SSD |
| Easa [10], 1994 | Probabilistic method for SD design at railroad crossings. | AFOSM | SD at railroad crossings |
| Easa [11], 2000 | Reliability of ISD design that replaced the extreme values with the moments of the probability distributions. | FOSM | ISD at uncontrolled intersections |
| Richl and Sayed [21], 2006 | Reliability analysis of a series of horizontal curves with varying horizontal SD restrictions. | FORM, FOSM | SD on HC |
| El-Khoury and Hobeika [24], 2007 | PSD distribution that accounts for the variations in the contributing random PSD design variables. | MC simulation | PSD on two-lane roads |
| Sarhan and Hassan [25], 2008 | Reliability analysis to estimate the probability of hazards from the insufficiency of SD. | MC Simulation | SD on 3D alignments |
| Ibrahim et al. [14], 2012 | Reliability analysis to optimize cross-sections with restricted SD. | FORM | SD on cross sections |
| Llorca et al. [23], 2014 | Reliability analysis to evaluate the risk associated with PSD standards. | FORM | PSD on two-lane roads |
| Easa and Hussain [18], 2016 | Reliability analysis to estimate left-turn SD at stop-control intersections. | FOSM | ISD at stop-control intersections |
| Hussain and Easa [19], 2016 | Reliability analysis to estimate left-turn SD at signalized intersections. | FOSM | SD for left turn at signalized intersections |
| Osama et al. [20], 2016 | Reliability analysis framework to evaluate the risk of limited SD for permitted left-turn movements. | FORM, FOSM | SD at signalized intersections |
| De Santos-Berbe et al. [22], 2017 | Reliability analysis to evaluate the risk level of limited SD for three ASD modelling methods. | FORM | SD on HC |
| Wood and Donnell [26], 2017 | Reliability analysis to improve consistency between the ASD and SSD criteria in design policy. | MC Simulation | SD on HC |
| Faizi and Easa [28], 2018 | Probabilistic method for the determination of SSD at roundabouts. | FOSM | SSD at roundabouts |
| Andrade-Catano et al. [27], 2020 | Probabilistic approach to evaluate the risk level associated with sag curve designs with headlight SD. | MC simulation | SD on VC |
| Ve (km/h) | Vc (km/h) | Ra (m) | dcirb (m) | Required Sight Distance D1 (m) | ||||
|---|---|---|---|---|---|---|---|---|
| Linear | Nonlinear | |||||||
| r = 1 | r = 0.5 | r = 1.5 | ||||||
| Value | Diff (%) c | Value | Diff (%) | |||||
| 30 | 30 | 24 | 12.4 | 45.1 | 45.1 | 0.0 | 45.1 | 0.0 |
| 20 | 9 | 4.2 | 39.8 | 42.2 | 6.0 | 38.8 | −2.5 | |
| 40 | 40 | 50 | 26.7 | 60.2 | 60.2 | 0.0 | 60.2 | 0.0 |
| 30 | 24 | 12.4 | 52.8 | 55.4 | 4.9 | 51.8 | −1.9 | |
| 20 | 9 | 4.2 | 43 | 51.3 | 19.3 | 39.5 | −8.1 | |
| 50 | 50 | 94 | 48.3 | 75.2 | 75.2 | 0.0 | 75.2 | 0.0 |
| 40 | 50 | 26.7 | 65.3 | 68 | 4.1 | 64.3 | −1.5 | |
| 30 | 24 | 12.4 | 54.3 | 60.9 | 12.2 | 51.6 | −5.0 | |
| 60 | 60 | 149 | 78.5 | 90.2 | 90.2 | 0.0 | 90.2 | 0.0 |
| 50 | 94 | 48.3 | 77.4 | 79.4 | 2.6 | 76.7 | −0.9 | |
| 40 | 50 | 26.7 | 65.6 | 69.9 | 6.6 | 63.9 | −2.6 | |
| 70 | 60 | 149 | 78.5 | 90.5 | 90.8 | 0.3 | 90.4 | −0.1 |
| 50 | 94 | 48.3 | 77.4 | 79.4 | 2.6 | 76.7 | −0.9 | |
| 40 | 50 | 26.7 | 65.6 | 69.9 | 6.6 | 63.9 | −2.6 | |
| Variable | Unit | Extreme Value | Percentile a | z | Mean Value b |
|---|---|---|---|---|---|
| Ve | km/h | 30 to 70 | 95% | 1.64 | 25.8 to 60.1 |
| Vc | km/h | 20 to 60 | 95% | 1.64 | 17.2 to 51.5 |
| tc | s | 5.8 | 95% | 1.64 | 5 |
| a | m/s2 | 1.2 | 10% | −1.28 | 1.3 |
| Ve (km/h) | Vc (km/h) | Deterministic D1 (m) | Reliability-Based D1 (m) | |||||
|---|---|---|---|---|---|---|---|---|
| CV = 5% | CV = 10% | |||||||
| Pnc = 1% | Pnc = 5% | Pnc = 10% | Pnc = 1% | Pnc = 5% | Pnc = 10% | |||
| (a) Deceleration Shape Parameter, r = 0.5 | ||||||||
| 30 | 30 | 46 | 46 | 44 | 43 | 49 | 46 | 43 |
| 20 | 43 | 43 | 41 | 40 | 47 | 43 | 41 | |
| 40 | 40 | 61 | 61 | 58 | 57 | 80 | 74 | 71 |
| 30 | 56 | 57 | 54 | 53 | 72 | 66 | 63 | |
| 20 | 52 | 55 | 52 | 51 | 63 | 57 | 55 | |
| 50 | 50 | 76 | 75 | 72 | 70 | 89 | 82 | 79 |
| 40 | 69 | 72 | 69 | 67 | 80 | 74 | 71 | |
| 30 | 61 | 64 | 61 | 60 | 72 | 66 | 63 | |
| 60 | 60 | 91 | 91 | 87 | 85 | 98 | 90 | 88 |
| 50 | 80 | 81 | 77 | 76 | 89 | 82 | 79 | |
| 40 | 70 | 72 | 69 | 67 | 80 | 74 | 71 | |
| 70 | 60 | 91 | 91 | 87 | 85 | 98 | 91 | 88 |
| 50 | 80 | 81 | 77 | 76 | 89 | 82 | 79 | |
| 40 | 70 | 72 | 69 | 67 | 80 | 74 | 71 | |
| (b) Deceleration shape parameter, r = 1. | ||||||||
| 30 | 30 | 46 | 46 | 44 | 43 | 49 | 46 | 43 |
| 20 | 40 | 41 | 39 | 38 | 44 | 41 | 39 | |
| 40 | 40 | 61 | 61 | 58 | 57 | 80 | 68 | 65 |
| 30 | 53 | 54 | 51 | 50 | 62 | 57 | 55 | |
| 20 | 44 | 46 | 43 | 42 | 51 | 47 | 45 | |
| 50 | 50 | 76 | 75 | 72 | 70 | 89 | 78 | 75 |
| 40 | 66 | 67 | 64 | 63 | 73 | 68 | 65 | |
| 30 | 55 | 56 | 54 | 53 | 62 | 57 | 55 | |
| 60 | 60 | 91 | 91 | 87 | 85 | 98 | 90 | 86 |
| 50 | 78 | 78 | 75 | 73 | 84 | 78 | 75 | |
| 40 | 66 | 67 | 64 | 63 | 73 | 68 | 65 | |
| 70 | 60 | 91 | 91 | 87 | 85 | 97 | 90 | 86 |
| 50 | 78 | 78 | 75 | 73 | 84 | 78 | 75 | |
| 40 | 66 | 67 | 64 | 63 | 73 | 68 | 65 | |
| Vc (km/h) | Deterministic (m) | Reliability-Based D2 (m) | |||||
|---|---|---|---|---|---|---|---|
| CV = 5% | CV = 10% | ||||||
| Pnc = 1% | Pnc = 5% | Pnc = 10% | Pnc = 1% | Pnc = 5% | Pnc = 10% | ||
| 20 | 33 | 31 | 30 | 29 | 34 | 31 | 30 |
| 25 | 41 | 39 | 37 | 36 | 42 | 39 | 37 |
| 30 | 49 | 47 | 45 | 43 | 51 | 46 | 44 |
| 35 | 57 | 54 | 52 | 50 | 59 | 54 | 51 |
| 40 | 65 | 62 | 59 | 58 | 68 | 62 | 59 |
| 45 | 73 | 70 | 66 | 65 | 76 | 69 | 66 |
| 50 | 81 | 78 | 74 | 72 | 84 | 77 | 73 |
| 55 | 89 | 85 | 81 | 79 | 93 | 84 | 80 |
| 60 | 98 | 93 | 88 | 86 | 101 | 92 | 88 |
| Vc (km/h) | Rcmin (m) | Maximum Lateral Clearance, Cm (m) | ||||
|---|---|---|---|---|---|---|
| Deterministic a | CV = 5% | CV = 10% | ||||
| Pnc = 5% | Pnc = 10% | Pnc = 5% | Pnc = 10% | |||
| 20 | 8.1 | 7.1 | 5.9 | 5.4 | 6.4 | 5.9 |
| 25 | 14.6 | 6.5 | 4.8 | 4.4 | 5.6 | 4.8 |
| 30 | 23.8 | 5.3 | 4.0 | 3.3 | 4.3 | 3.6 |
| 35 | 35.9 | 4.3 | 3.0 | 2.5 | 3.5 | 2.7 |
| 40 | 51.2 | 3.5 | 2.2 | 2.1 | 2.8 | 2.2 |
| 45 | 70.0 | 2.8 | 1.7 | 1.5 | 2.2 | 1.7 |
| 50 | 92.7 | 2.0 | 0.8 | 0.5 | 1.3 | 0.7 |
| Entry Radius R1 (m) | Lateral Clearance, Cd (m) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ve = 30 km/h | Vc = 40 km/h | Vc = 50 km/h | ||||||||||
| Vc = 20 km/h | Vc = 30 km/h | Vc = 20 km/h | Vc = 30 km/h | Vc = 30 km/h | Vc = 40 km/h | |||||||
| Pnc = 5% | Pnc = 10% | Pnc = 5% | Pnc = 10% | Pnc = 5% | Pnc = 10% | Pnc = 5% | Pnc = 10% | Pnc = 5% | Pnc = 10% | Pnc = 5% | Pnc = 10% | |
| (a) Deceleration Shape Parameter, r = 0.5 | ||||||||||||
| 20 | 8.1 | 8.4 | 9 | 8.4 | 11.7 | 11.3 | 13.4 | 12.9 | 13.4 | 12.9 | 14.6 | 14.2 |
| 30 | 4.3 | 4.6 | 5.3 | 4.6 | 8.7 | 8.1 | 10.8 | 10.2 | 10.8 | 10.1 | 12.4 | 11.8 |
| 40 | 1.6 | 1.8 | 2.3 | 1.8 | 5.1 | 4.5 | 7.7 | 6.7 | 7.7 | 6.8 | 9.7 | 8.9 |
| 50 | 0.3 | 0.4 | 0.6 | 0.4 | 2.4 | 2 | 4.4 | 3.7 | 4.4 | 3.7 | 6.5 | 5.7 |
| (b) Deceleration Shape Parameter, r = 1.0 | ||||||||||||
| 20 | 7.5 | 6.8 | 9 | 8.1 | 9.3 | 8.7 | 11.7 | 11.2 | 11.7 | 11.2 | 13.7 | 13.2 |
| 30 | 3.6 | 3.0 | 5.2 | 4.3 | 5.6 | 4.9 | 8.7 | 8.1 | 8.6 | 8.1 | 11.2 | 10.6 |
| 40 | 1.2 | 0.9 | 2.2 | 1.6 | 2.5 | 2 | 5.1 | 4.5 | 5 | 4.5 | 8.2 | 7.4 |
| 50 | 0.1 | 0.0 | 0.6 | 0.3 | 0.7 | 0.5 | 2.4 | 2 | 2.4 | 2 | 4.9 | 4.2 |
| Changed Variable | Value | D1 or D2 a (m) | Diff (%) |
|---|---|---|---|
| (a) Sensitivity of D1 | |||
| Ve | 55 km/h | 45.6 | −4.8 |
| Vc | 33 km/h | 46.7 | −2.5 |
| tc | 5.5 s | 54.9 | 14.6 |
| a | 1.43 m/s2 | 48.7 | 1.7 |
| r | 1.1 | 48.4 | 1.0 |
| CVve | 10% | 44.1 | −7.9 |
| CVvc | 10% | 55.0 | 14.8 |
| CVtc | 10% | 53.5 | 11.7 |
| CVa | 10% | 47.4 | −1.0 |
| CVr | 10% | 47.8 | −0.2 |
| 0.8 | 45.7 | −4.6 | |
| (b) Sensitivity of D2 | |||
| Vc | 33 km/h | 50.9 | 9.9 |
| tc | 5.5 s | 50.9 | 9.9 |
| CVvc | 10% | 46.8 | 1.1 |
| CVtc | 10% | 50.4 | 8.9 |
| 0.8 | 47.0 | 1.5 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Easa, S.M.; Ma, Y.; Liu, S.; Yang, Y.; Arkatkar, S. Reliability Analysis of Intersection Sight Distance at Roundabouts. Infrastructures 2020, 5, 67. https://doi.org/10.3390/infrastructures5080067
Easa SM, Ma Y, Liu S, Yang Y, Arkatkar S. Reliability Analysis of Intersection Sight Distance at Roundabouts. Infrastructures. 2020; 5(8):67. https://doi.org/10.3390/infrastructures5080067
Chicago/Turabian StyleEasa, Said M., Yang Ma, Shixu Liu, Yanqun Yang, and Shriniwas Arkatkar. 2020. "Reliability Analysis of Intersection Sight Distance at Roundabouts" Infrastructures 5, no. 8: 67. https://doi.org/10.3390/infrastructures5080067
APA StyleEasa, S. M., Ma, Y., Liu, S., Yang, Y., & Arkatkar, S. (2020). Reliability Analysis of Intersection Sight Distance at Roundabouts. Infrastructures, 5(8), 67. https://doi.org/10.3390/infrastructures5080067