



The Benefit of Informed Risk-Based Management of Civil Infrastructures



Abstract
:1. Introduction
2. Bayesian Decision Theory
2.1. General Framework—Value of Information
- = set of the available actions, with
- = set of the possible states of the system, with
- = set of the possible outcomes of a test, with
- = utility function, which expresses the desirability of the combination of the action and the state .
2.2. Value of Information in Emergency Management
3. Flood Emergency Management
3.1. Current Practice
- The scour depth has exceeded the critical level or is falling rapidly;
- The WSEL has exceeded a critical level;
- The bridge presents clear structural anomalies;
- Existing scour countermeasures, such as rock riprap, show signs of failure;
- The hydraulic conditions are critical and a flood wave is imminent.
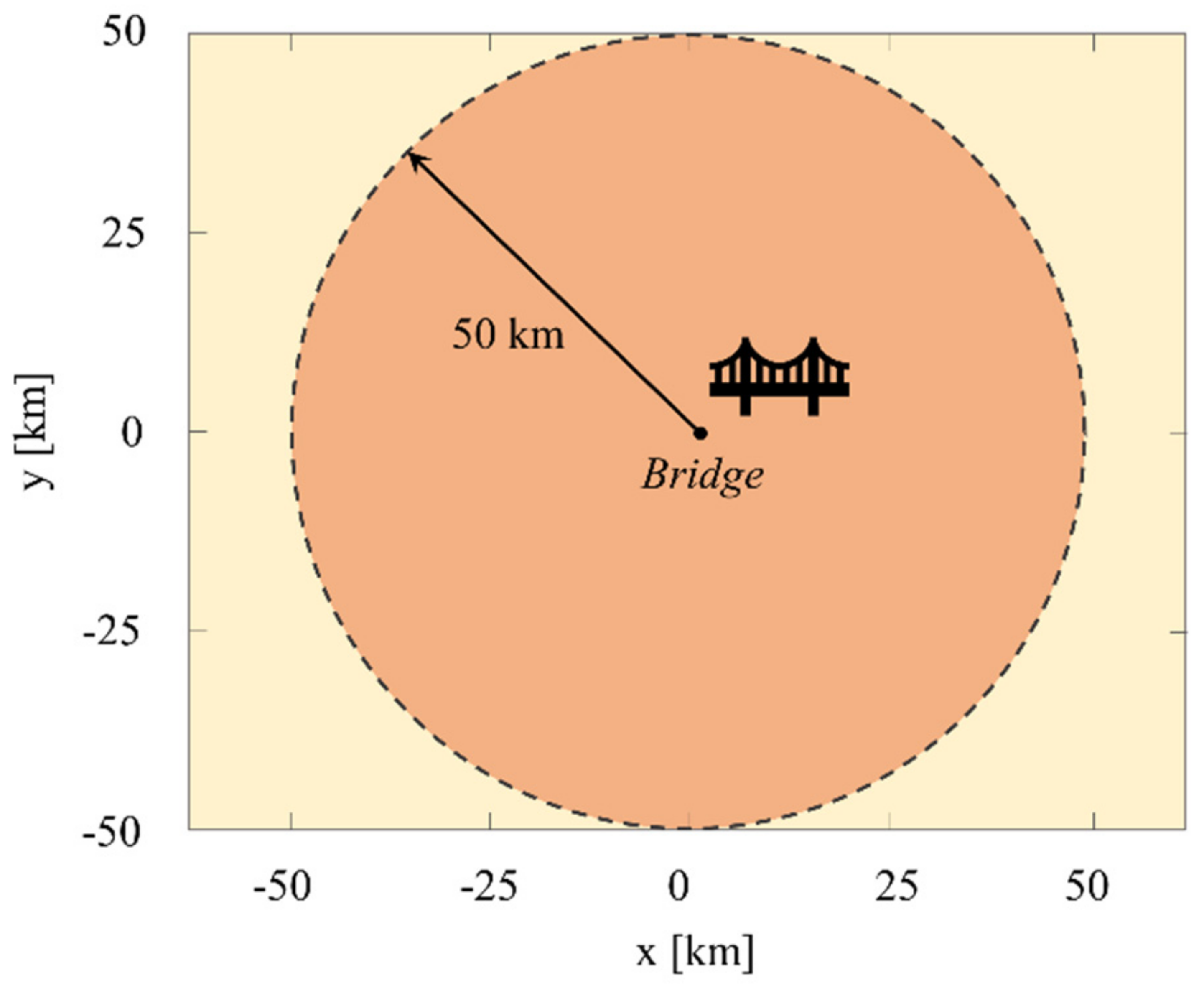
3.2. Case Study
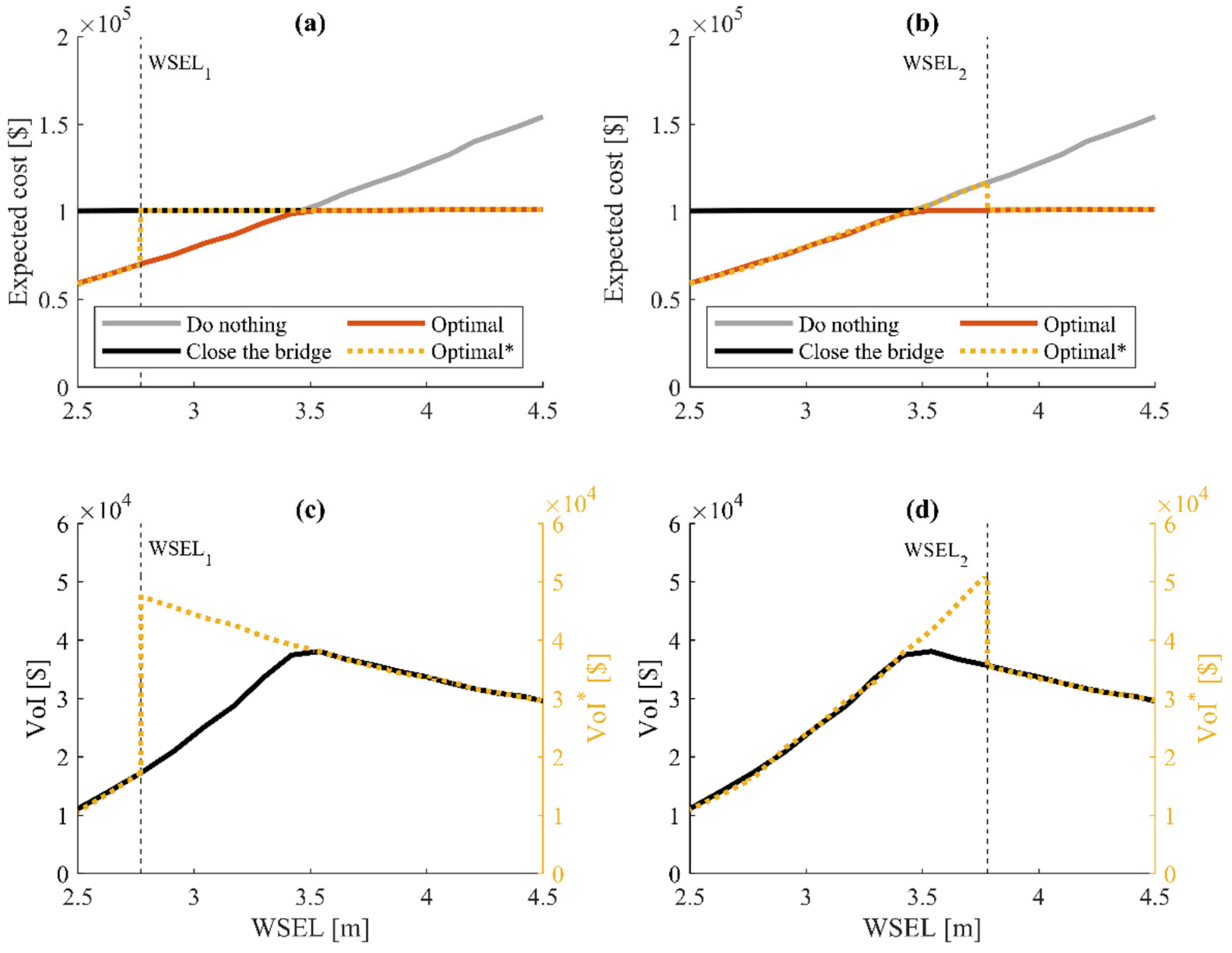
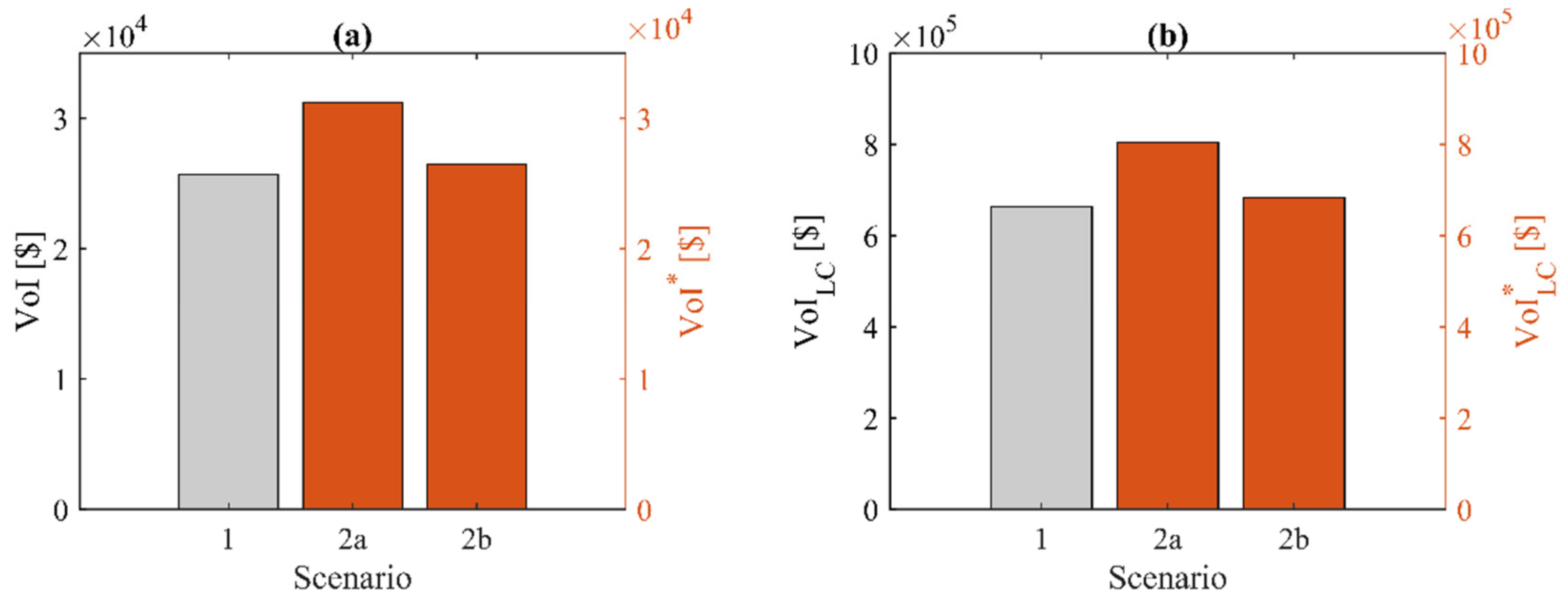
3.3. Decision Scenarios and VoI Analysis
- Scenario 1, a risk-based decision scenario for both the Prior and the Pre-Posterior analysis;
- Scenario 2, a heuristic Prior analysis and a risk-based Pre-Posterior analysis. The heuristic Prior analysis is based on the attained WSEL according to current flood emergency management procedures (see Section 3.1). Two critical WSEL thresholds are considered, i.e., WSEL1 = 2.77 m, corresponding to Q = 600 m3/s (Scenario 2a), and WSEL2 = 3.78 m, corresponding to Q = 1000 m3/s (Scenario 2b).
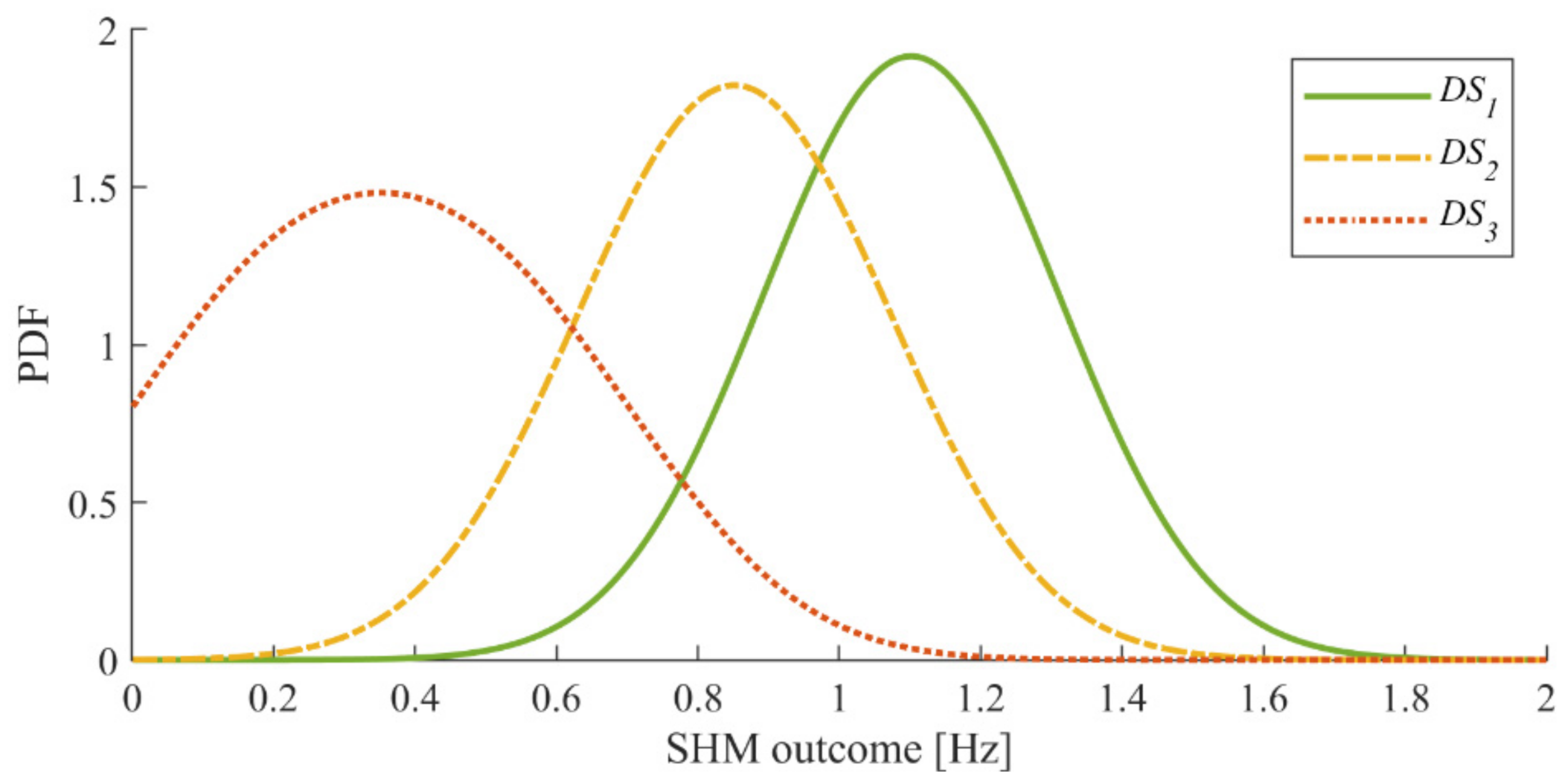
4. Post-Earthquake Emergency Management
4.1. Current Practice
- (i)
- Fast Reconnaissance, to determine the extent of the region affected by the disastrous event;
- (ii)
- Preliminary Damage Assessment (PDA), to provide preliminary information on the state of each bridge and establish if further investigations are required;
- (iii)
- Detailed Damage Assessment (DDA), to provide detailed information about structural conditions;
- (iv)
- Extended investigation, to further investigate structural conditions and determine repairs or replacements.
- (i)
- Level 1 inspections aimed at providing a preliminary classification of structures. It comprises aerial surveys or drive-through inspections aimed at assigning a tag to each structure. The Green tag is assigned to structures in good condition, the Yellow tag to structures whose conditions are uncertain, and the Red tag to unsafe structures which should be closed to traffic.
- (ii)
- Level 2 inspections aimed at investigating the conditions of Yellow tagged structures in more detail. After Level 2 inspections, traffic limitations might be issued, such as restricting traffic to emergency vehicles only.
4.2. Case Study
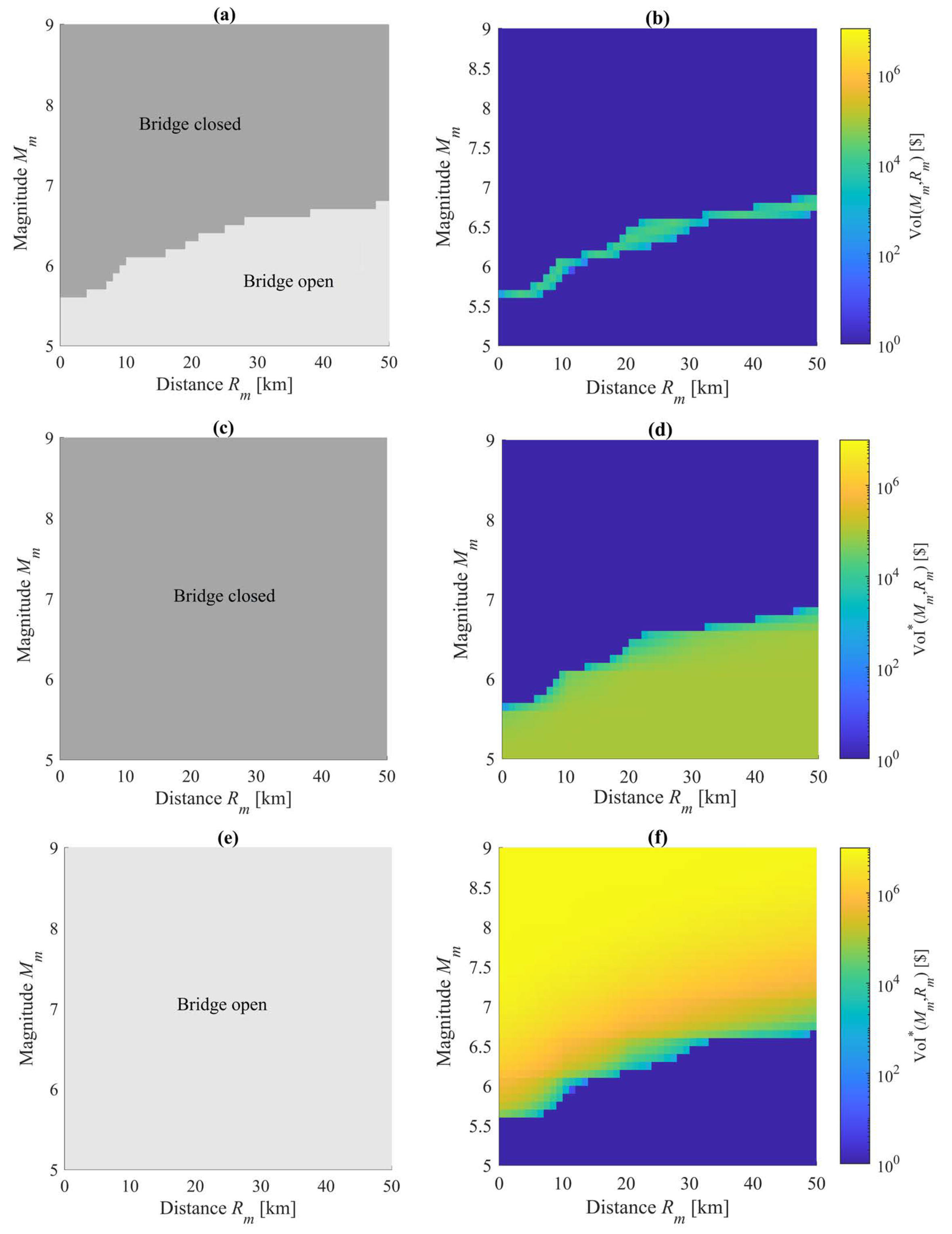
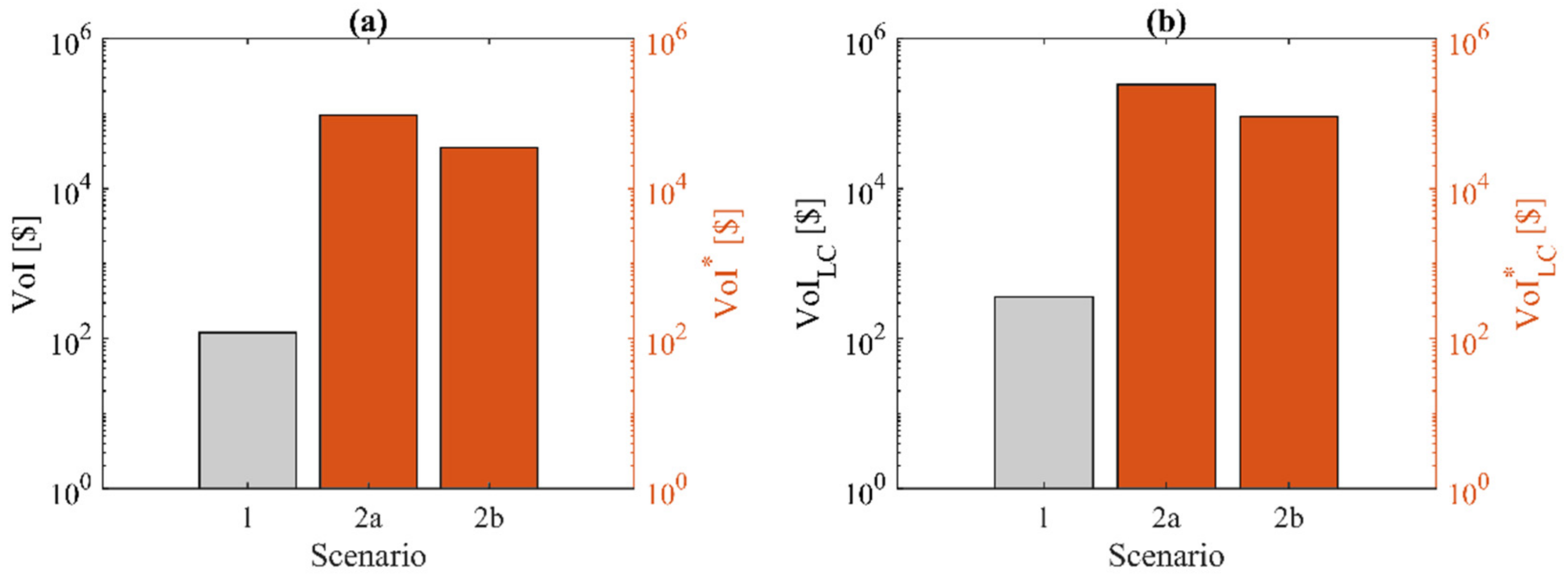
4.3. VoI Analysis
- Scenario 1, a risk-based decision scenario for both the Prior and the Pre-Posterior analysis;
- Scenario 2, a heuristic Prior analysis and risk-based Pre-Posterior analysis. The heuristic Prior analysis is based on the prior knowledge of the decision-maker on the state of the bridge, which, for instance, comes from an expeditious visual inspection. Two situations are analyzed: first, the bridge is closed because it is not considered safe, without risk considerations (Scenario 2a); second, the bridge is not closed because it is considered safe or deeper investigations are planned (Scenario 2b).
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bocchini, P.; Frangopol, D.M. Optimal Resilience- and Cost-Based Postdisaster Intervention Prioritization for Bridges along a Highway Segment. J. Bridge Eng. 2012, 17, 117–129. [Google Scholar] [CrossRef]
- Zhong, J.; Gardoni, P.; Rosowsky, D. Seismic fragility estimates for corroding reinforced concrete bridges. Struct. Infrastruct. Eng. 2012, 8, 55–69. [Google Scholar] [CrossRef]
- Ganesh Prasad, G.; Banerjee, S. The Impact of Flood-Induced Scour on Seismic Fragility Characteristics of Bridges. J. Earthq. Eng. 2013, 17, 803–828. [Google Scholar] [CrossRef]
- Dueñas-Osorio, L.; Craig, J.I.; Goodno, B.J. Seismic response of critical interdependent networks. Earthq. Eng. Struct. Dyn. 2007, 36, 285–306. [Google Scholar] [CrossRef]
- Hammond, M.J.; Chen, A.S.; Djordjević, S.; Butler, D.; Mark, O. Urban flood impact assessment: A state-of-the-art review. Urban Water J. 2015, 12, 14–29. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Liu, Y.; Liu, J.; Lan, S.; Yang, J. Causes and statistical characteristics of bridge failures: A review. J. Traffic Transp. Eng. 2022, 9, 388–406. [Google Scholar] [CrossRef]
- Wardhana, K.; Hadipriono, F.C. Analysis of Recent Bridge Failures in the United States. J. Perform. Constr. Facil. 2003, 17, 144–151. [Google Scholar] [CrossRef] [Green Version]
- Montalvo, C.; Cook, W.; Keeney, T. Retrospective Analysis of Hydraulic Bridge Collapse. J. Perform. Constr. Facil. 2020, 34, 04019111. [Google Scholar] [CrossRef]
- Flora, A.; Cardone, D.; Vona, M.; Perrone, G. A simplified approach for the seismic loss assessment of rc buildings at urban scale: The case study of Potenza (Italy). Buildings 2021, 11, 142. [Google Scholar] [CrossRef]
- Han, R.; Li, Y.; van de Lindt, J. Seismic Loss Estimation with Consideration of Aftershock Hazard and Post-Quake Decisions. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2016, 2, 04016005. [Google Scholar] [CrossRef]
- Kilanitis, I.; Sextos, A. Impact of earthquake-induced bridge damage and time evolving traffic demand on the road network resilience. J. Traffic Transp. Eng. 2019, 6, 35–48. [Google Scholar] [CrossRef]
- Cardone, D.; Flora, A.; De Luca Picione, M.; Martoccia, A. Estimating direct and indirect losses due to earthquake damage in residential RC buildings. Soil Dyn. Earthq. Eng. 2019, 126, 105801. [Google Scholar] [CrossRef]
- Quqa, S.; Landi, L.; Diotallevi, P.P. Seismic structural health monitoring using the modal assurance distribution. Earthq. Eng. Struct. Dyn. 2021, 50, 2379–2397. [Google Scholar] [CrossRef]
- Limongelli, M.P.; Çelebi, M. Seismic Structural Health Monitoring; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Rainieri, C.; Notarangelo, M.A.; Fabbrocino, G. Experiences of Dynamic Identification and Monitoring of Bridges in Serviceability Conditions and after Hazardous Events. Infrastructures 2020, 5, 86. [Google Scholar] [CrossRef]
- Dolce, M.; Nicoletti, M.; De Sortis, A.; Marchesini, S.; Spina, D.; Talanas, F. Osservatorio sismico delle strutture: The Italian structural seismic monitoring network. Bull. Earthq. Eng. 2017, 15, 621–641. [Google Scholar] [CrossRef] [Green Version]
- Prendergast, L.J.; Gavin, K. A review of bridge scour monitoring techniques. J. Rock Mech. Geotech. Eng. 2014, 6, 138–149. [Google Scholar] [CrossRef]
- Lin, Y.-B.; Chen, J.-C.; Chang, K.-C.; Chern, J.-C.; Lai, J.-S. Real-time monitoring of local scour by using fiber Bragg grating sensors. Smart Mater. Struct. 2005, 14, 664–670. [Google Scholar] [CrossRef]
- Maroni, A.; Tubaldi, E.; Ferguson, N.; Tarantino, A.; McDonald, H.; Zonta, D. Electromagnetic Sensors for Underwater Scour Monitoring. Sensors 2020, 20, 4096. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Kim, C.; Obrien, E.J.; Prendergast, L.J.; Fitzgerald, P.C.; Nakajima, S. Experimental demonstration of a mode shape-based scour monitoring method for multi-span bridges with shallow foundations. J. Bridge Eng. 2020; in press. [Google Scholar] [CrossRef]
- Rainieri, C.A.; Gargaro, D.A.; Fabbrocino, G.I.; Maddaloni, G.; Di Sarno, L.; Prota, A.N.; Manfredi, G. Shaking table tests for the experimental verification of the effectiveness of an automated modal parameter monitoring system for existing bridges in seismic areas. Struct. Control Health Monit. 2018, 25, e2165. [Google Scholar] [CrossRef]
- Zhang, W.-H.; Lu, D.-G.; Qin, J.; Thöns, S.; Faber, M.H. Value of information analysis in civil and infrastructure engineering: A review. J. Infrastruct. Preserv. Resil. 2021, 2, 16. [Google Scholar] [CrossRef]
- Thöns, S. On the Value of Monitoring Information for the Structural Integrity and Risk Management. Comput. Civ. Infrastruct. Eng. 2018, 33, 79–94. [Google Scholar] [CrossRef]
- Straub, D. Value of information analysis with structural reliability methods. Struct. Saf. 2014, 49, 75–85. [Google Scholar] [CrossRef]
- Pozzi, M.; Der Kiureghian, A. Assessing the value of information for long-term structural health monitoring. In Health Monitoring of Structural and Biological Systems; Kundu, T., Ed.; SPIE Press: San Diego, CA, USA, 2011; p. 79842W. [Google Scholar] [CrossRef]
- Giordano, P.F.; Quqa, S.; Limongelli, M.P. The value of monitoring a structural health monitoring system. Struct. Saf. 2023, 100, 102280. [Google Scholar] [CrossRef]
- Malings, C.; Pozzi, M. Conditional entropy and value of information metrics for optimal sensing in infrastructure systems. Struct. Saf. 2016, 60, 77–90. [Google Scholar] [CrossRef]
- Kamariotis, A.; Chatzi, E.; Straub, D. A framework for quantifying the value of vibration-based structural health monitoring. Mech. Syst. Signal. Process 2023, 184, 109708. [Google Scholar] [CrossRef]
- Giordano, P.F.; Iacovino, C.; Quqa, S.; Limongelli, M.P. The value of seismic structural health monitoring for post-earthquake building evacuation. Bull. Earthq. Eng. 2022, 20, 4367–4393. [Google Scholar] [CrossRef]
- Faber, M.H. Statistics and Probability Theory. In Pursuit of Engineering Decision Support; Springer Netherlands: Dordrecht, The Netherlands, 2012. [Google Scholar] [CrossRef]
- Raiffa, H.; Schlaifer, R. Applied Statistical Decision Theory. Boston: Division of Research; Graduate School of Business Administration, Harvard University: Boston, MA, USA, 1961. [Google Scholar]
- Giordano, P.F.; Limongelli, M.P. The value of structural health monitoring in seismic emergency management of bridges. Struct. Infrastruct. Eng. 2020, 18, 537–553. [Google Scholar] [CrossRef]
- Giordano, P.F.; Prendergast, L.J.; Limongelli, M.P. Quantifying the value of SHM information for bridges under flood-induced scour. Struct. Infrastruct. Eng. 2022. [Google Scholar] [CrossRef]
- Zonta, D.; Glisic, B.; Adriaenssens, S. Value of information: Impact of monitoring on decision-making. Struct. Control Health Monit. 2014, 21, 1043–1056. [Google Scholar] [CrossRef]
- Tubaldi, E.; White, C.J.; Patelli, E.; Mitoulis, S.A.; De Almeida, G.; Brown, J.; Cranston, M.; Hardman, M.; Koursari, E.; Lamb, R.; et al. Invited perspectives: Challenges and future directions in improving bridge flood resilience. Nat. Hazards Earth Syst. Sci. 2022, 22, 795–812. [Google Scholar] [CrossRef]
- Tubaldi, E.; Maroni, A.; McDonald, H.; Zonta, D. Monitoring-Based Decision Support System for Risk Management of Bridge Scour, Proceedings of the 1st Conference of the European Association on Quality Control of Bridges and Structures. EUROSTRUCT 2021, Padua, Italy, 29 August–1 September 2021; Lecture Notes in Civil Engineering; Springer: Cham, Switzerland, 2022; Volume 200, pp. 877–884. [Google Scholar] [CrossRef]
- Crotti, G.; Cigada, A. Scour at river bridge piers: Real-time vulnerability assessment through the continuous monitoring of a bridge over the river Po, Italy. J. Civ. Struct. Health Monit. 2019, 9, 513–528. [Google Scholar] [CrossRef]
- Ayres Associates. FIELD MANUAL. Scour Critical Bridges: High-Flow Monitoring and Emergency Procedures; Idaho Department of Transportation: Boise, Idaho, 2004. [Google Scholar]
- CAE. Roads at Risk of Flooding? Sardinia Invests in Technology and Safety. 2020. Available online: https://www.cae.it/eng/news/roads-at-risk-of-flooding-sardinia-invests-in-technology-and-safety.-nw-1364.html (accessed on 1 November 2022).
- Giordano, P.F.; Prendergast, L.J.; Limongelli, M.P. The value of different monitoring systems in the management of scoured bridges. In Experimental Vibration Analysis for Civil Engineering Structures; Springer: Cham, Switzerland, 2023. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Risk-Based Management Guidelines for Scour at Bridges with Unknown Foundations; The National Academies Press: Washington, DC, USA, 2007. [Google Scholar] [CrossRef]
- Johnson, P.A.; Clopper, P.E.; Zevenbergen, L.W.; Lagasse, P.F. Quantifying Uncertainty and Reliability in Bridge Scour Estimations. J. Hydraul. Eng. 2015, 141, 04015013. [Google Scholar] [CrossRef]
- Davis, D.W.; Burnham, M.W. Accuracy of Computed Water Surface Profiles; Hydraulic Engineering; U.S. Army Corps of Engineers: Washington, DC, USA, 1987; pp. 818–823.
- Johnson, P.A.; Dock, D.A. Probabilistic bridge scour estimates. J. Hydraul. Eng. 1998, 124, 750–754. [Google Scholar] [CrossRef]
- Ghosn, M.; Moses, F.; Wang, J. Design of Highway Bridges for Extreme Events; Transportation Research Board: Washington, DC, USA, 2003. [Google Scholar]
- Caspani, V.F.; Tonelli, D.; Poli, F.; Zonta, D. Designing a Structural Health Monitoring System Accounting for Temperature Compensation. Infrastructures 2021, 7, 5. [Google Scholar] [CrossRef]
- Kamariotis, A.; Chatzi, E.; Straub, D. Value of information from vibration-based structural health monitoring extracted via Bayesian model updating. Mech. Syst. Signal Process. 2022, 166, 108465. [Google Scholar] [CrossRef]
- Kottegoda, N.T.; Rosso, R. Applied Statistics for Civil and Environmental Engineers; Wiley-Blackwell: Hoboken, NJ, USA, 2009. [Google Scholar]
- National Academies of Sciences, Engineering, and Medicine. Assessing, Coding, and Marking of Highway Structures in Emergency Situations—Volume 3: Coding and Marking Guidelines; The National Academies Press: Washington, DC, USA, 2016. [Google Scholar] [CrossRef]
- Ramirez, J.A.; Frosch, R.J.; Sozen, M.A.; Turk, A.M. Handbook for the Post-Earthquake Evaluation of Bridges and Roads; Indiana Department of Transportation: Indianapolis, IN, USA, 2000. [Google Scholar]
- Alessandri, S.; Giannini, R.; Paolacci, F. Aftershock risk assessment and the decision to open traffic on bridges. Earthq. Eng. Struct. Dyn. 2013, 42, 2255–2275. [Google Scholar] [CrossRef]
- Mander, J. Fragility Curve Development for Assessing the Seismic Vulnerability of Highway Bridges; Technical Report, MCEER HighwayProject; FHWA: Philadelphia, PA, USA, 1999. [Google Scholar]
- Bindi, D.; Pacor, F.; Luzi, L.; Puglia, R.; Massa, M.; Ameri, G.; Paolucci, R. Ground motion prediction equations derived from the Italian strong motion database. Bull. Earthq. Eng. 2011, 9, 1899–1920. [Google Scholar] [CrossRef] [Green Version]
- Iervolino, I.; Chioccarelli, E.; Giorgio, M. Aftershocks’ Effect on Structural Design Actions in Italy. Bull. Seismol. Soc. Am. 2018, 108, 2209–2220. [Google Scholar] [CrossRef]
- Utsu, T. Aftershocks and Earthquake Statistics(1): Some Parameters Which Characterize an Aftershock Sequence and Their Interrelations. J. Fac. Sci. Hokkaido Univ. 1970, 3, 129–195. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Unit | Distribution | Mean | CoV | Ref. |
|---|---|---|---|---|---|
| - | Det. | 1 | - | - | |
| - | Det. | 1 | - | - | |
| - | Uniform | 1.2 | 0.048 | [44] | |
| - | Det. | 1 | - | - | |
| m | Det. | 1.2 | - | - | |
| m | Det. | 50 | - | - | |
| - | Det. | 0.003 | - | - | |
| - | Normal | 0.55 | 0.52 | [45] | |
| - | Det. | 0.025 | - |
| Damage State | ||
|---|---|---|
| Cost | ||
|---|---|---|
| Mainshock | Aftershock | ||
|---|---|---|---|
| Variable | Value | Variable | Value |
| 5 | −1.71 | ||
| 9 | 0.97 | ||
| 1 | −1.46 | ||
| 0.94 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giordano, P.F.; Limongelli, M.P. The Benefit of Informed Risk-Based Management of Civil Infrastructures. Infrastructures 2022, 7, 165. https://doi.org/10.3390/infrastructures7120165
Giordano PF, Limongelli MP. The Benefit of Informed Risk-Based Management of Civil Infrastructures. Infrastructures. 2022; 7(12):165. https://doi.org/10.3390/infrastructures7120165
Chicago/Turabian StyleGiordano, Pier Francesco, and Maria Pina Limongelli. 2022. "The Benefit of Informed Risk-Based Management of Civil Infrastructures" Infrastructures 7, no. 12: 165. https://doi.org/10.3390/infrastructures7120165
APA StyleGiordano, P. F., & Limongelli, M. P. (2022). The Benefit of Informed Risk-Based Management of Civil Infrastructures. Infrastructures, 7(12), 165. https://doi.org/10.3390/infrastructures7120165