



Simplicial Complex-Enhanced Manifold Embedding of Spatiotemporal Data for Structural Health Monitoring


Abstract
:1. Introduction
2. Mathematical Preliminary
2.1. Simplicial Complex
- The standard k-simplex, denoted by , is the convex span of the elementary basis of , i.e.,For example, the standard 1-simplex is the (closed) line segment in connecting the two points and .
- A k-simplex is the convex span of geometrically independent points in (i.e, are linearly independent); we denote it by , and we call these generating points the vertices of .
- Deleting any vertex from a k-simplex , the -simplex spanned by the remaining vertices is called a face of . Moreover, if is the deleted vertex, then the face is denoted by .
- A singular k-simplex in a topological space X is a continuous map .
- Rigid motions, such as rotation, translating, and reflection. We can move or rotate the simplex anywhere, and it still is regarded as the same simplex.
- Stretch. We can stretch out any points away from each other and change the connected structures as well.
- We cannot crush a simplex from n dimension to dimension by deformation.
2.2. Topological Invariants
2.3. Differential Geometry
2.3.1. Ricci Curvature
2.3.2. Ricci Flow
3. Materials and Methods
3.1. Materials
3.1.1. Dataset 1
3.1.2. Dataset 2
3.1.3. Dataset 3
- The finite element models give a structure model in terms of active DOF q, which is related to physical DOF by ;
- The motion equation is , where f is a vector of forces applied to the physical DOF, and M and K are mass and stiffness matrices;
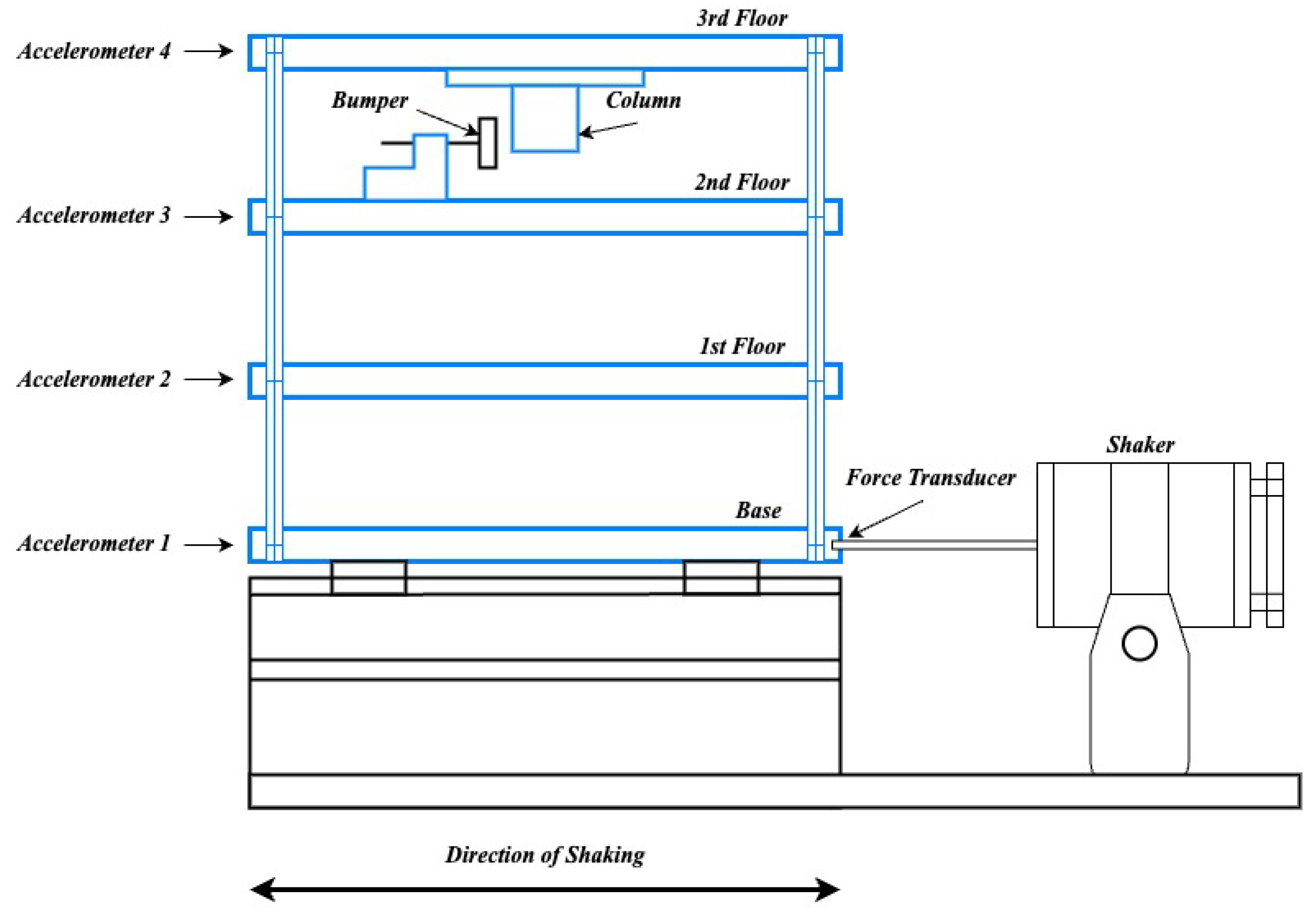
- A total of 16 accelerometers, two each in the and directions per floor;
- Hence, we can return noisy sensor measures , where v is a sensor noise vector, the elements of which are Gaussian pulse process with RMS of the largest RMS of the acceleration responses (typically one of the roof accelerations), and C is based on the solution of standard eigenvalue problems.
3.2. Methods
3.2.1. Euler Characteristic
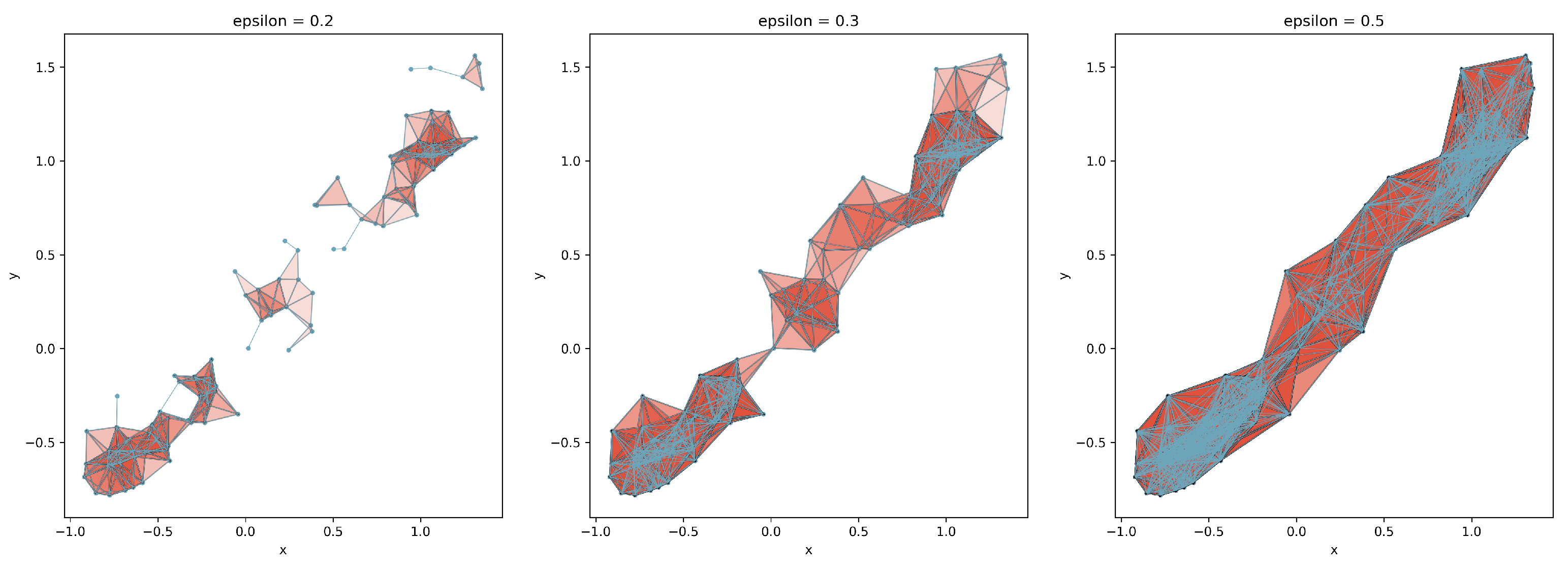
3.2.2. Manifold Filtration
3.2.3. Curvature Enhanced Manifold Learning
4. Results
4.1. Binary Classification
4.2. Multi-Labels Classification
4.3. Evaluation and Computational Cost
5. Discussion
5.1. Signal Length of the Simplicial Simplex
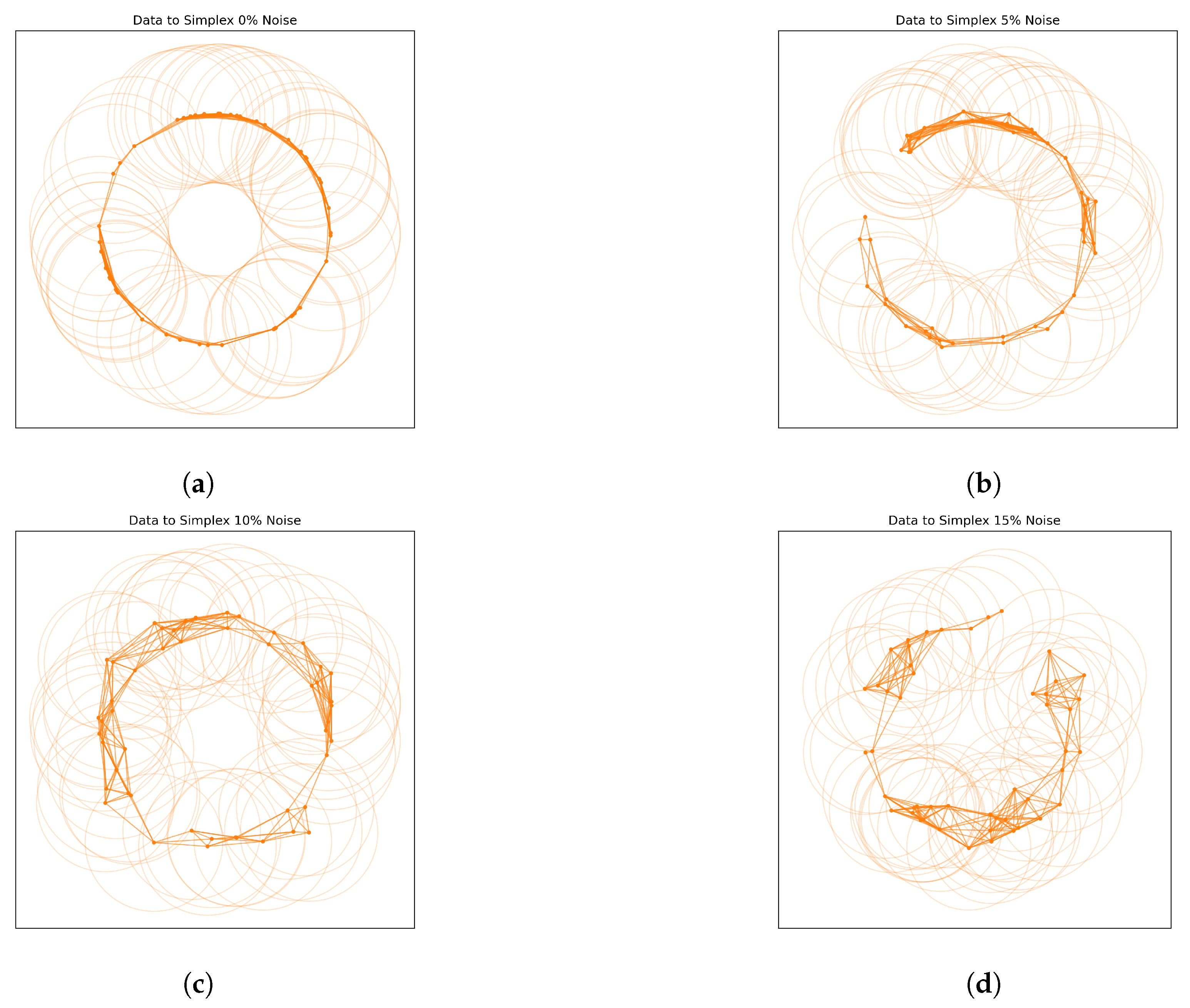
5.2. Effect of Noise Levels
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sony, S.; Laventure, S.; Sadhu, A. A literature review rerof next-generation smart sensing technology in structural health monitoring. Struct. Control Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- González, M.P.; Zapico, J.L. Seismic damage identification in buildings using neural networks and modal data. Comput. Struct. 2008, 86, 416–426. [Google Scholar] [CrossRef]
- De Lautour, O.R.; Omenzetter, P. Prediction of seismic-induced structural damage using artificial neural networks. Eng. Struct. 2009, 31, 600–606. [Google Scholar] [CrossRef] [Green Version]
- Alves, P.; Couto, E.B.; Francisco, P.M. Board of directors’ composition and capital structure. Res. Int. Bus. Financ. 2015, 35, 1–32. [Google Scholar] [CrossRef]
- Bornn, L.; Farrar, C.R.; Park, G.; Farinholt, K. Structural health monitoring with autoregressive support vector machines. J. Vib. Acoust. 2009, 131, 2. [Google Scholar] [CrossRef] [Green Version]
- Chong, D. Collective Action and the Civil Rights Movement; University of Chicago Press: Chicago, IL, USA, 2014. [Google Scholar]
- Kim, S.M.; Hsu, A.; Lee, Y.H.; Dresselhaus, M.; Palacios, T.; Kim, K.K.; Kong, J. The effect of copper pre-cleaning on graphene synthesis. Nanotechnology 2013, 24, 365602. [Google Scholar] [CrossRef]
- Liang, X.; Mosalam, K.; Muin, S. Simulation-based data-driven damage detection for highway bridge systems. In Proceedings of the 11th National Conference on Earthquake Engineering (NCEE), Los Angeles, CA, USA, 25–29 June 2018. [Google Scholar]
- Sajedi, S.O.; Liang, X. Vibration-based semantic damage segmentation for large-scale structural health monitoring. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 579–596. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Liang, X.; Sajedi, S.O. Deep Bayesian U-Nets for Efficient, Robust and Reliable Post-Disaster Damage Localization. arXiv 2020, arXiv:2009.11460. [Google Scholar]
- Lin, C.; Griffith, C.; Zhu, K.; Mathur, V. Understanding Vulnerability of Children in Surrey; The University of British Columbia: Vancouver, BC, Canada, 2018. [Google Scholar]
- Sajedi, S.O.; Liang, X. Uncertainty-assisted deep vision structural health monitoring. Comput. Aided Civ. Infrastruct. Eng. 2021, 36, 126–142. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons: New York, NY, USA, 2012. [Google Scholar]
- Xu, N.; Liu, Y. Fractal-based manifold learning for structure health monitoring. In Proceedings of the AIAA Scitech 2021 Forum, Online. 19–21 January 2021; p. 1167. [Google Scholar]
- Cohen-Steiner, D.; Edelsbrunner, H.; Harer, J. Stability of persistence diagrams. In Proceedings of the Twenty-First Annual Symposium on Computational Geometry, Pisa, Italy, 6–8 June 2005; pp. 263–271. [Google Scholar]
- Smith, A.; Zavala, V.M. The Euler characteristic: A general topological descriptor for complex data. Comput. Chem. Eng. 2021, 154, 107463. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, N.; Liu, Y. Robust physics discovery via supervised and unsupervised pattern recognition using the Euler characteristic. Comput. Methods Appl. Mech. Eng. 2022, 397, 115110. [Google Scholar] [CrossRef]
- Wold, S.; Esbensen, K.; Geladi, P. Principal component analysis. Chemom. Intell. Lab. Syst. 1987, 2, 37–52. [Google Scholar] [CrossRef]
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 11. [Google Scholar]
- McInnes, L.; Healy, J.; Melville, J. Umap: Uniform manifold approximation and projection for dimension reduction. arXiv 2018, arXiv:1802.03426. [Google Scholar]
- Xu, N.; Liu, Y. CAMEL: Curvature-Augmented Manifold Embedding and Learning. arXiv 2023, arXiv:2303.02561. [Google Scholar]
- Stahl, S.; Stenson, C. Introduction to Topology and Geometry; John Wiley & Sons: New York, NY, USA, 2014. [Google Scholar]
- Mandelbrot, B.B. Self-affine fractals and fractal dimension. Phys. Scr. 1985, 32, 257. [Google Scholar] [CrossRef]
- Seifert, H.; Threlfall, W. A Textbook of Topology; Academic Press: Cambridge, MA, USA, 1980. [Google Scholar]
- Atkin, R.H. Combinatorial Connectivities in Social Systems: An Application of Simplicial Complex Structures to the Study of Large Organizations; Springer: Cham, Switzerland, 1977. [Google Scholar]
- Kühnel, W. Differential Geometry; American Mathematical Society: Providence, RI, USA, 2015; Volume 77. [Google Scholar]
- Matoušek, J. Topological Methods in Combinatorics and Geometry; Lecture Notes; Department of Applied Mathematics: Prague, Czech Republic, 1994. [Google Scholar]
- Kelleher, A.P.C.; Pantano, A. Introduction to Simplicial Complexes (cit. on p. 40). Available online: https://www.math.uci.edu/~mathcircle/materials/MCsimplex.pdf (accessed on 6 January 2023).
- Colding, T.H. Ricci curvature and volume convergence. Ann. Math. 1997, 145, 477–501. [Google Scholar] [CrossRef]
- Bauer, F.; Hua, B.; Jost, J.; Liu, S.; Wang, G. The geometric meaning of curvature: Local and nonlocal aspects of ricci curvature. In Modern Approaches to Discrete Curvature; Springer: Cham, Switzerland, 2017; pp. 1–62. [Google Scholar]
- Samal, A.; Sreejith, R.; Gu, J.; Liu, S.; Saucan, E.; Jost, J. Comparative analysis of two discretizations of Ricci curvature for complex networks. Sci. Rep. 2018, 8, 1–16. [Google Scholar]
- Hamilton, R.S. Three-manifolds with positive Ricci curvature. J. Differ. Geom. 1982, 17, 255–306. [Google Scholar] [CrossRef]
- Ni, C.C.; Lin, Y.Y.; Luo, F.; Gao, J. Community detection on networks with ricci flow. Sci. Rep. 2019, 9, 1–12. [Google Scholar]
- Perelman, G. The entropy formula for the Ricci flow and its geometric applications. arXiv 2002, arXiv:math/0211159. [Google Scholar]
- Dyke, S.J.; Bernal, D.; Beck, J.; Ventura, C. Experimental phase II of the structural health monitoring benchmark problem. In Proceedings of the 16th ASCE Engineering Mechanics Conference, Seattle, WA, USA, 16–18 July 2003. [Google Scholar]
- Abdeljaber, O.; Avci, O.; Kiranyaz, M.S.; Boashash, B.; Sodano, H.; Inman, D.J. 1-D CNNs for structural damage detection: Verification on a structural health monitoring benchmark data. Neurocomputing 2018, 275, 1308–1317. [Google Scholar] [CrossRef]
- Omenzetter, P.; de Lautour, O.R. Classification of damage in structural systems using time series analysis and supervised and unsupervised pattern recognition techniques. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, San Diego, CA, USA, 8–11 March 2010; SPIE: New York, NY, USA, 2010; Volume 7647, pp. 1424–1435. [Google Scholar]
- Figueiredo, E.; Flynn, E. Three-story building structure to detect nonlinear effects. In Report SHMTools Data Description; Triad National Security, LLC: Columbus, OH, USA, 2009. [Google Scholar]
- Johnson, E.A.; Lam, H.F.; Katafygiotis, L.S.; Beck, J.L. Phase I IASC-ASCE structural health monitoring benchmark problem using simulated data. J. Eng. Mech. 2004, 130, 3–15. [Google Scholar] [CrossRef]
- Zhang, P.; Shen, H.; Zhai, H. Machine learning topological invariants with neural networks. Phys. Rev. Lett. 2018, 120, 066401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Adler, R.J. Some new random field tools for spatial analysis. Stoch. Environ. Res. Risk Assess. 2008, 22, 809–822. [Google Scholar] [CrossRef] [Green Version]
- Ziou, D.; Allili, M. Generating cubical complexes from image data and computation of the Euler number. Pattern Recognit. 2002, 35, 2833–2839. [Google Scholar] [CrossRef]
- Poincaré, H. Analysis Situs; Gauthier-Villars: Paris, France, 1895. [Google Scholar]
- Smith, A.D.; Dłotko, P.; Zavala, V.M. Topological data analysis: Concepts, computation, and applications in chemical engineering. Comput. Chem. Eng. 2021, 146, 107202. [Google Scholar] [CrossRef]
- Conneau, A.; Khandelwal, K.; Goyal, N.; Chaudhary, V.; Wenzek, G.; Guzmán, F.; Grave, E.; Ott, M.; Zettlemoyer, L.; Stoyanov, V. Unsupervised cross-lingual representation learning at scale. arXiv 2019, arXiv:1911.02116. [Google Scholar]
- DeVries, Z.; Hoda, M.; Rivers, C.S.; Maher, A.; Wai, E.; Moravek, D.; Stratton, A.; Kingwell, S.; Fallah, N.; Paquet, J.; et al. Development of an unsupervised machine learning algorithm for the prognostication of walking ability in spinal cord injury patients. Spine J. 2020, 20, 213–224. [Google Scholar] [CrossRef]
- Tang, J.; Liu, J.; Zhang, M.; Mei, Q. Visualizing large-scale and high-dimensional data. In Proceedings of the 25th International Conference on World Wide Web, Montreal, QC, Canada, 11–15 April 2016; pp. 287–297. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Description |
|---|---|
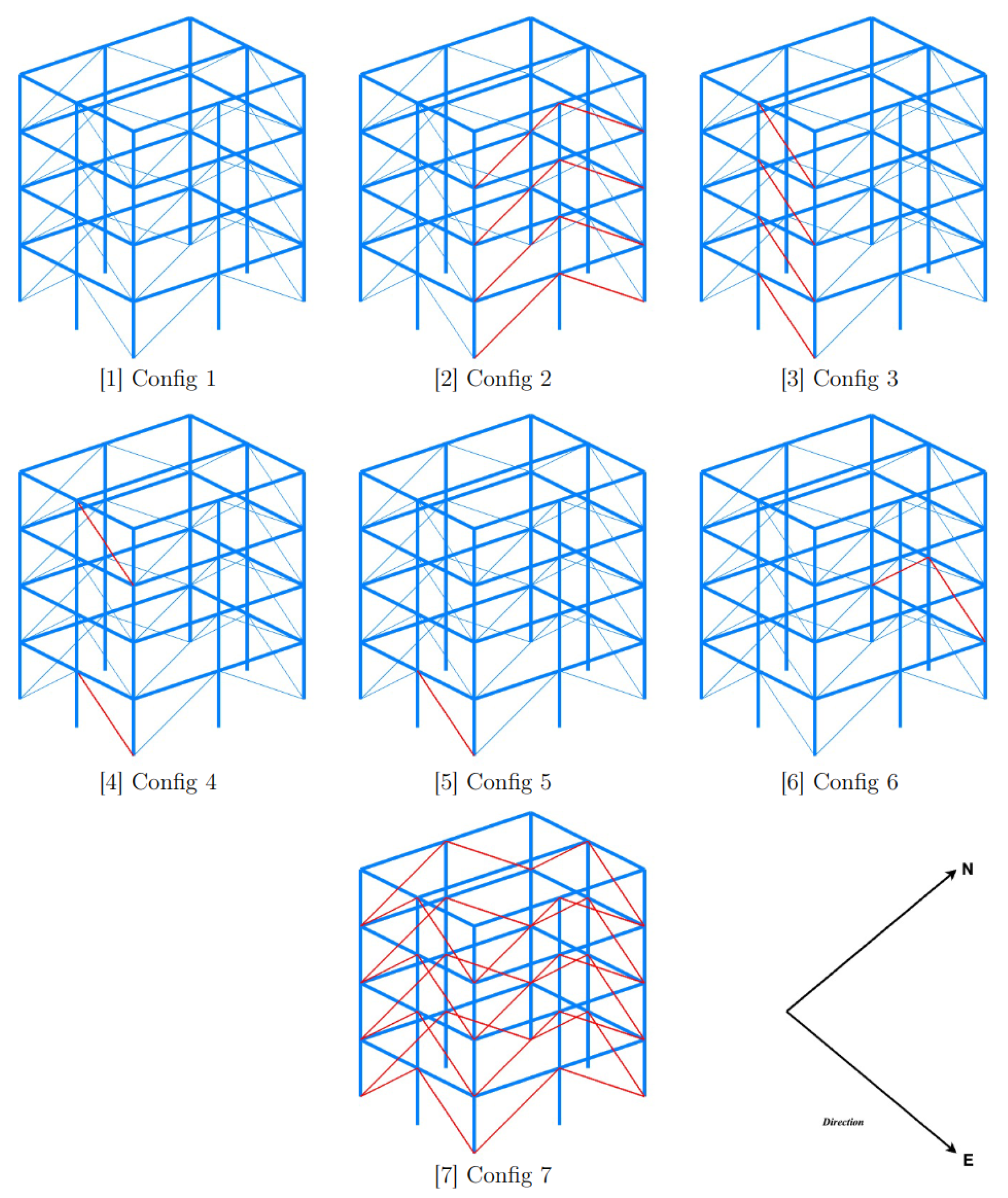
| 1 | Health |
| 2 | No brace on the east side |
| 3 | No brace on the SE corner per floor in one bay |
| 4 | No brace on the SE corner of the first and fourth floors in one bay |
| 5 | No brace on the SE corner of the first floor in one bay |
| 6 | No brace on the N side of the second floor |
| 7 | No brace for the structure |
| Structural Case | Conditions |
|---|---|
| 1 | Mass on the 1st floor |
| 2 | Add gap between the bumper and the suspended column |
| 3 | Column: 1BD – stiffness reduction |
| 4 | Column: 3BD – stiffness reduction |
| 5 | Column: 2AD + 2BD – stiffness reduction |
| 6 | Column: 2AD + 2BD – stiffness reduction |
| Dataset | F1-Score (%) | Computational Time |
|---|---|---|
| 1 | 100.00% | 32.61 s |
| 2 | 94.21% | 21.55 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, N.; Zhang, Z.; Liu, Y. Simplicial Complex-Enhanced Manifold Embedding of Spatiotemporal Data for Structural Health Monitoring. Infrastructures 2023, 8, 46. https://doi.org/10.3390/infrastructures8030046
Xu N, Zhang Z, Liu Y. Simplicial Complex-Enhanced Manifold Embedding of Spatiotemporal Data for Structural Health Monitoring. Infrastructures. 2023; 8(3):46. https://doi.org/10.3390/infrastructures8030046
Chicago/Turabian StyleXu, Nan, Zhiming Zhang, and Yongming Liu. 2023. "Simplicial Complex-Enhanced Manifold Embedding of Spatiotemporal Data for Structural Health Monitoring" Infrastructures 8, no. 3: 46. https://doi.org/10.3390/infrastructures8030046
APA StyleXu, N., Zhang, Z., & Liu, Y. (2023). Simplicial Complex-Enhanced Manifold Embedding of Spatiotemporal Data for Structural Health Monitoring. Infrastructures, 8(3), 46. https://doi.org/10.3390/infrastructures8030046