1. Introduction
Emotional states are usually reflected in facial expressions. Expressing and reading facial expressions is an effective way of social interaction and communication. However, some individuals have severe difficulties in recognizing facial communication clues. It is the case of individuals with Autism Spectrum Disorder (ASD) [
1].
Nowadays, assistive robotics is focused on helping users with special needs in their daily activities. Assistive robots are designed to identify, measure, and react to social behaviours [
2]. They can be a social support to motivate children and socially educate them. According to studies [
3], it was observed that children with ASD can exhibit certain positive social behaviours when interacting with robots in contrast to what is perceived when interacting with social partners (peers, caregivers, and professionals). Furthermore, few worldwide projects pursue to include robots as part of the intervention program for individuals with ASD [
4,
5]. These studies have demonstrated that robots can promote a high degree of motivation and engagement in subjects, even in those who are reluctant to socially interact with professionals [
5,
6]. Studies also point out that individuals with ASD tend to show a preference for robot-like features over non-robotics toys [
7,
8], and in some situations, respond faster when prompted by a robotic movement than by a human movement.
A humanoid robot can then be a useful tool to develop social–emotional skills of children with ASD, due to the engagement and positive learning outcome [
9]. Additionally, robotic systems offer certain advantages when compared with virtual agents, likely due to the capability of robotic systems to use physical motion in a manner not possible in screen technologies [
10].
As previously referred, successful human–human communication relies on the ability to read affective and emotional signals, but robotic systems are emotionally blind. The research that has been conducted in the field of Affective Computing tries to endow robotic systems with the capability of reading emotional signals, dynamically adapting the robot behaviour during interaction [
11,
12]. Different technological strategies have been used to try to mitigate the emotion recognition impairments that usually individuals with ASD present, mainly through the use of assistive robots capable of synthesising “affective behaviours” [
9,
13,
14].
Following this idea, in the present work a humanoid robotic platform capable of expressing emotions is used as a mediator in social communication with children with ASD. Thus, the main goals of this work are (a) the development of a system capable of automatically detect five emotions (happiness, sadness, anger, surprise, fear) and neutral through facial cues and (b) interfacing the developed system with a robotic platform, allowing social communication with children with ASD. In order to achieve the mentioned goals, the proposed experimental setup uses the Intel® RealSense™ 3D sensor and the Zeno R50 Robokind® robotic platform. This layout uses a Support Vector Machine (SVM) technique to automatically classify the five emotions plus neutral expressed by the user in real time.
In the literature, few works have been devoted to the recognition of emotional expressions in games with children with ASD using robotic tools that are capable of synthesizing facial expressions. Furthermore, some systems proposed in the literature are controlled using the Wizard-of-Oz (WOZ) setup, meaning that the robot does not prompt an autonomous behaviour accordingly to the children’s actions [
8,
15,
16]. The research presented in this article tries to tackle this gap. The robot is used as a mediator in social communication activities, endorsing emotion recognitions and imitation skills in an autonomous way.
In order to assess the system in a support context, an exploratory study was conducted involving 6 children with ASD during 7 sessions. The results obtained allowed to infer that the proposed system is able to interact with children with ASD in a comfortable and natural way, giving a strong indication that this system may be a suitable and relevant tool in the context of emotion recognitions and imitation skills with this target group.
This article is organized as follows: in
Section 2 research regarding affective computing and emotion recognition impairment of children with ASD is addressed, and an overview of the topics on affective sensing and humanoid robots that are capable of expressing facial expressions are presented.
Section 3 presents the overall system and the experimental methodology followed. The results and their discussion are presented in
Section 4.
Section 5 finalizes the article, with conclusions and future work.
2. Background
The affective behaviour displayed by humans is multi-modal, subtle, and complex. Humans use affective information such as facial expressions, eye gaze, various hand gestures, head motion, and posture to deduce the emotional state of each other [
17]. The research on facial expression conducted by Paul Ekman [
18] demonstrated the universality and discreteness of emotions by enumerating the basic emotions (happiness, sadness, anger, surprise, disgust, and fear), and creating the Facial Action Coding System (FACS) [
19]. Head pose and eye gaze, together with facial expressions, are very important to convey emotional states. Head nods help emphasizing an idea during a conversation. In addition, it also helps to agree or disagree with a point of view through nodding gestures such as ‘yes’ or ‘no’ head movements, synchronizing the interactional rhythm of the conversation [
20]. Eye gaze is important for analysing attentiveness, competence, as well as intensity of emotions. They are processed together, when analysing human emotional states, from a computational point of view [
21].
Although the process of imitating, recognizing, and displaying emotions can be an easy task for the majority of humans, it is a very difficult task for individuals with ASD [
22]. Individuals with ASD are characterized by displaying repetitive patterns of behaviour, for having restricted activities or interests, and impairments in social communication. Furthermore, these individuals have difficulties in recognizing body language, making eye contact, understanding other people’s emotions, and lack of social or emotional reciprocity [
23]. These difficulties in interpreting social situations in general cause children with ASD to lose or miss information on what is happening or happened during the social exchange [
24].
Technological tools, such as assistive robots [
5,
6], have been employed in support sessions with children with ASD. Some of the robots used have a humanoid appearance [
15]. Although researchers [
25,
26,
27] have used a variety of facially expressive robots in their works, few have devoted their attention to the recognition of emotional expressions in games with children with ASD in an autonomously way. In fact, one of the fields of application of HRI (Human Robot Interaction) is ASD research, where social robots help users with special needs in their daily activities [
2]. The following paragraphs summarize some of the relevant developed works involving a humanoid robot capable of displaying facial expression interacting with children with ASD.
FACE [
28,
29] is a female android built to allow children with ASD to deal with expressive and emotional information. The system was tested with five children with ASD and fifteen typically developing children. The evaluated emotions were the six basic emotions (happiness, sadness, anger, fear, disgust, and surprise). The results demonstrated that happiness, sadness, and anger were correctly labelled with high accuracy for both children with ASD and typically developing children. Conversely, fear, disgust, and surprise were not labelled correctly, particularly by participants with ASD. The overall recognition rate for FACE with children with ASD was 60.0%, and the recognition results for each emotion were the following: anger—100%, disgust—20%, fear—0%, happiness—100%, sadness 100%, surprise—40%. The results for FACE recognition rates with typically developing children were: anger—93%, disgust—20%, fear—46.7%, happiness—93.3%, sadness—86.7%, surprise—40%, and the average of all emotions was 61.1%.
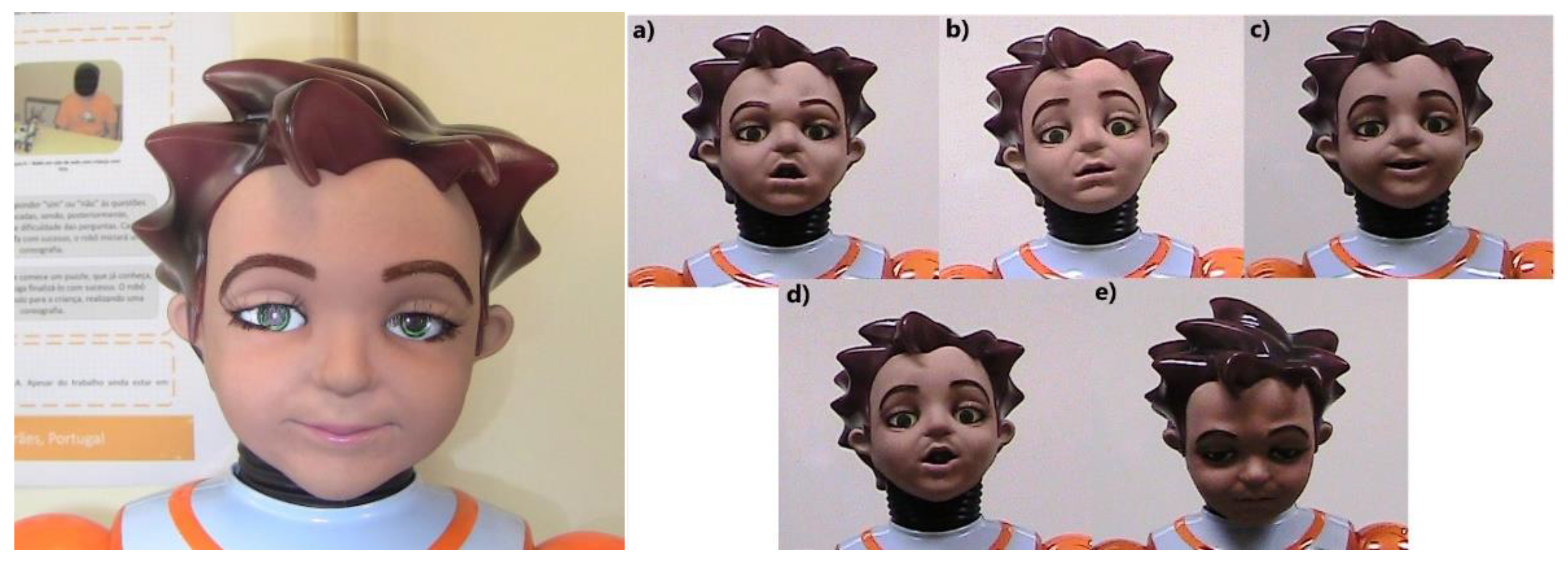
ZECA [
30], Zeno Engaging Children with Autism, is a humanoid robot from Robokind
® (Zeno R50) that is used in the
Robótica-Autismo research project at University of Minho (roboticaautismo.com). It seeks to use robotic platforms to improve social skills of individuals with ASD. ZECA was employed in a study with the purpose of analysing the use of a humanoid robot as a tool to teach emotions recognition and labelling. In order to evaluate the designed facial expressions, two experiments were conducted. In the first one, the system was tested by forty-two typically developing children aged between 8 and 10 years old (group A) that watched videos of ZECA performing the following facial expressions: neutral, surprise, sadness, happiness, fear, and anger. Then, sixty-one adults aged between 18 and 59 years old (group B) watched the same videos. Both groups completed a questionnaire that consisted in selecting the most appropriate correspondence for each video. The recognition rates of the facial expressions for group A were the following: anger—26.2%, fear—45.2%, happiness—83.3%, neutral—85.7%, sadness—97.6%, surprise—76.2%, and the average of all emotions was 69.0%. The recognition rates of the facial expressions for group B were the following: anger—24.6%, fear—77.0%, happiness—91.8%, neutral—90.2%, sadness—91.8%, surprise—86.6%, and the average of all emotions was 77.0%. The second experiment consisted of showing similar videos of ZECA performing the same facial expression, but now with gestures. The recognition rates of the facial expressions improved in general, but with more impact for these two emotions: fear (73.8%) and anger (47.6%). Similar to group A, the recognition rates in group B, in general, also improved. The recognition rates of the facial expressions, adding gestures, for group B were the following: anger—70.5%, fear—93.4%, happiness—98.4%, neutral—91.8%, sadness—88.5%, surprise—83.6%, and the average of all emotions was 77.0%.
More recently, there has been a concern in developing more autonomous approaches [
16,
31,
32] to interact with children with ASD.
Leo et al. [
31] developed a system that automatically detects and tracks the child’s face and then recognizes emotions on the basis of a machine learning pipeline based on Histogram of Oriented Gradients (HOG) descriptor and SVM. They used the Zeno R25 robot from Robokind
® as mediator in activities concerning imitation of facial expressions. The system was evaluated by conducting two different experimental sessions: the first one tested the system using the CK + dataset; the second one involved 3 children with ASD in a preliminary exploratory session where 4 different expressions were investigated (happiness, sadness, anger, and fear). Considering the results obtained from the first experimental session, the following average accuracies for each facial expression were obtained: anger—88.6%, disgust—89.0%, fear—100%, happiness—100%, sadness—100%, and surprise—97.4%; achieving an average accuracy of 95.8%. From the results concerning the second session with the children with ASD, the authors concluded that the system can be effectively used to monitor the children’s behaviours.
Chevalier et al. [
16] developed an activity for facial expression imitation whereby the robot imitates the child’s face to encourage the child to notice facial expressions in a play-based game. The proposed game consisted of using the Zeno R25 robot from Robokind
®, which is capable of displaying facial expressions, in a mirroring game where initially the robot imitates some of the child’s facial cues and then the child gradually imitates the robot’s facial expression. A usability study was conducted with 15 typically developing children aged between 4 and 6 years old. The authors concluded that, in general, the last step of the activity where the child imitates the robot facial expression was challenging, i.e., some children had difficulties focusing on the robot’s face. Overall, the authors considered that the outcomes from the usability study were positive and believe that the target group, children with ASD, may benefit from it.
A multimodal and multilevel approach is proposed by Palestra et al. [
32] where the robot acts as a social mediator, trying to elicit specific behaviours in children, taking into account their multimodal signals. The social robot used in this research was the Robokind
® Zeno R25 humanoid robot that is capable of expressing human-like facial expressions. The system is composed by four software modules: head pose, body pose, eye contact, and facial expression. At the present stage of their research, the authors evaluated only the facial expression module in a preliminary study involving three high functioning children with ASD within the ages of 8–13 years old during two sessions. The facial expressions tested were anger, fear, happiness, and sadness. Each facial expression was consecutively imitated 4 times by the children. The authors evaluated the number of facial expressions that have been correctly imitated, the time needed to have eye contact, and the time needed to imitate the facial expression. The results obtained showed that the time of eye contact between session 1 and 2 decreased as well as the time needed to imitate the facial expression. Additionally, the success imitation rate for each facial expression increased in general from 20% in session 1 to 51.7% in session 2. Thus, the authors concluded that the robot can successfully play a mediator role in support sessions with children with ASD.
These works propose approaches that focus on how to increase the robot’s autonomy. However, these systems do not take into account the head motion and the eye gaze as features for the classifier, but both play an important role in expressing affect and communicating social signals [
21]. Thus, besides assessing the system performance in terms of metrics (e.g., accuracy), the present work presents an exploratory study involving six children with ASD during seven sessions with the goal of fostering facial expression recognition skills, providing a more natural interaction by introducing some autonomy to the system.
4. Results and Discussion
The following section presents the results obtained with the proposed system in the recognition of the five emotions considered in this work, ‘Happiness’, ‘Sadness’, ‘Anger’, ‘Surprise’, ‘Fear’, and ‘Neutral’. In order to access the performance of the developed system different experimental evaluations were conducted.
Firstly, two SVM classifiers using the Linear and the non-linear Radial Basis Function (RBF) kernel were trained in order to recognize the six facial expressions: ‘Happiness’, ‘Sadness’, ‘Anger’, ‘Surprise’, ‘Fear’, and ‘Neutral’. The k-Fold Cross Validation method (k-Fold CV), where k = 10, was used to evaluate the classifier, as it contributes for the generalization of the classifier, avoiding overfitting. The following metrics—accuracy, sensitivity, specificity, Area Under the Curve (AUC), and the Mathews Correlation Coefficient (MCC)—were employed to evaluate each classifier performance. Then, an experimental study was conducted in a school environment with typically developing children. Finally, an exploratory study was performed with children with ASD.
It is worth mentioning that this study has the approval of the Ethics Committee of the University and Informed Consents from children’s parents or those responsible were obtained prior to the experiments.
4.1. Model Evaluation—Offline and Real-Time
The system was firstly evaluated offline, in a simulation environment using
MATLAB, with the database created. Two multiclass SVM models were tested—the linear and the RBF kernels.
Table 3 and
Table 4 show the comparison between both models in terms of accuracy, sensitivity, specificity, AUC, and MCC. By comparing the results, it is possible to conclude that the SVM model with the RBF kernel presents an overall superior performance when compared to the SVM model with the linear kernel. The accuracies per class increased in the RBF SVM model, especially the accuracy of the class ‘Fear’ (66% to 89%),
Table 3. In consequence, the overall accuracy of the SVM model with the RBF kernel also increased from 88.15% to 93.63%, which may indicate that the relation between class labels and attributes is nonlinear. The RBF model also outperformed the linear model in the other metrics,
Table 4. Unlike the linear kernel, the RBF kernel can handle the case when the relation between class labels and attributes is nonlinear. Moreover, RBF has less hyper-parameters than other nonlinear kernels (e.g., polynomial kernel), which may decrease the complexity of model selection [
39]. Additionally, RBF usually has lower computational complexity, which in turn improves real-time computational performance [
40]. It is worth notice that the RBF kernel is widely used as a kernel function in emotion classification [
41].
The work of Leo et al. [
31], an approach that uses a conventional RGB camera, and the CK + database (a public dataset without children data) achieved an average accuracy of 94.3% for the six facial expressions. Despite using different experimental configurations, the present work achieved similar results of the state of art.
For real-time assessment, the proposed system was implemented and evaluated in a laboratorial environment with 14 adults (18–49 years old). The SVM model with RBF kernel implemented in the system was trained using the Accord Machine Learning C# library [
42]. The participant sat in front of the sensor, looked at the Intel
® RealSense™, and performed the emotion requested by the researcher.
Table 5 shows the recognition accuracy confusion matrix for the five emotions and neutral, with an overall accuracy of 88.3%. In general, the on-line system yields comparable results to that obtained in the off-line evaluation. ‘Happiness’ and ‘Sadness’ emotional states have accuracies over 90% and the other four facial expressions are consistently beyond 85%.
Concerning the real-time performance, the emotion recognition system was tested in a frame rate of 30 fps on i5 quad-core Central Processing Units (CPUs) with 16 GB RAM. The required time for the system to perform efficiently facial expression recognition is 1–3 ms, which means that the working frequencies achievable for sampling and processing are very high and do not compromise the real-time feature of the interaction process. The training computational cost of the system is approximately 1–2 s for the multi-class SVM classifier.
The performance of the proposed system was compared to the results presented in [
40]. This system was based on a
Kinect sensor and used the
Bosphorus database and SVM for facial expressions classification. The overall accuracy of the proposed system is 88% compared to 84% in [
40]. Regarding the required time for the proposed system to perform facial emotion, recognition is 1–3 ms compared to 3–5 ms in [
40].
4.2. Experimental Study with Typically Developing Children
This experimental phase was performed with typically developing children in a school environment. This study had two main goals: to test the system, with the two game scenarios, to detect the system constraints; to tune the conditions of the experimental scheme.
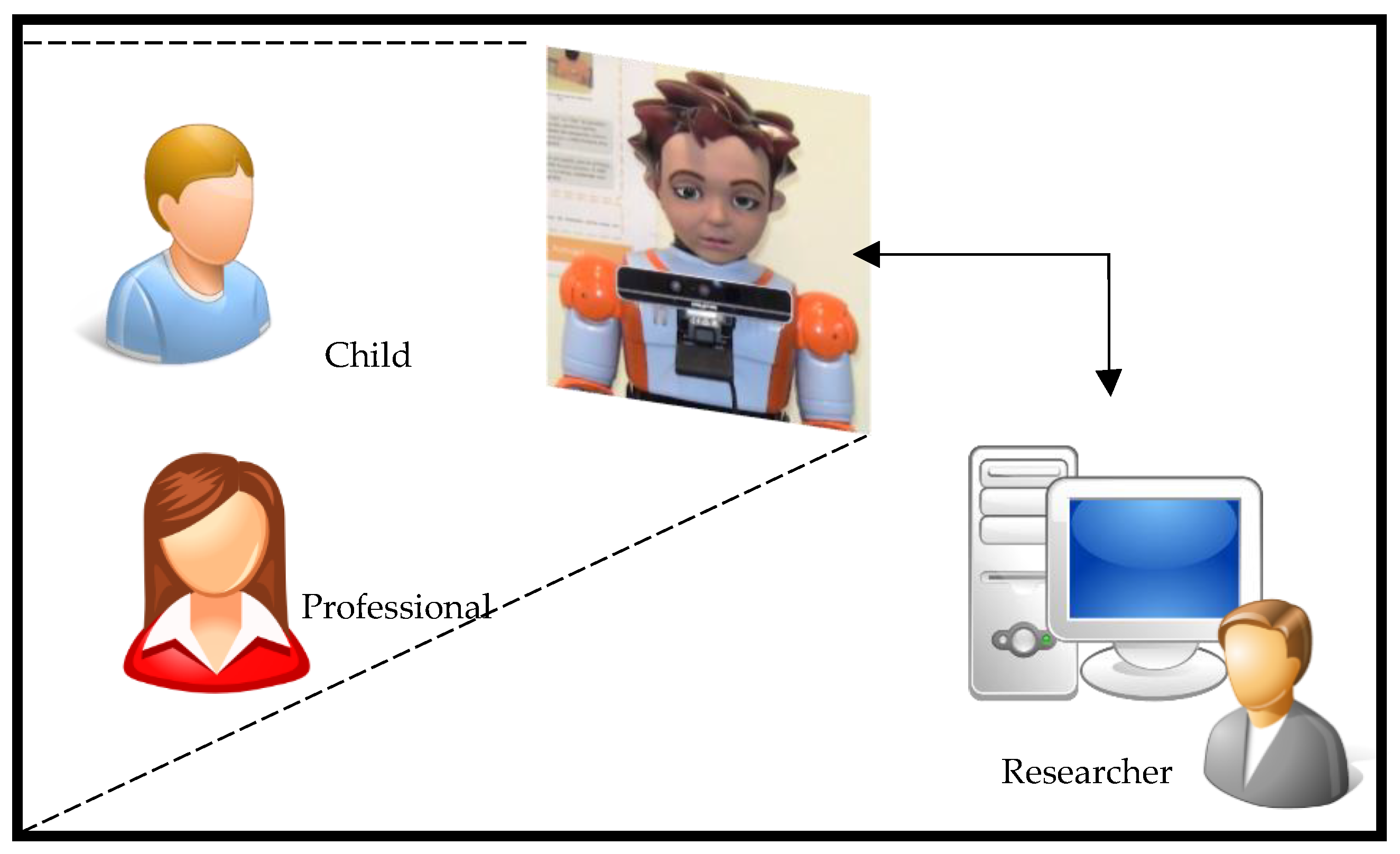
Following this trend, a set of preliminary experiments with the two game scenarios were carried out, involving 31 typically developing children aged between 6 and 9 years old. The facial expressions were asked (EMOTIONS scenario) or performed (IMITATE scenario) randomly by the robot. The experiments were performed individually in a triadic setup, i.e., child–ZECA–researcher. The robot had the role of mediator in the process of recognition and imitation of facial expressions.
Figure 3 shows the experimental configuration used. Each child performed a two-to-three-minute session where the child had to perform five facial expressions—anger, fear, happiness, sadness, and surprise (one trial for each facial expression in each activity). The researcher oversaw the progress of the activity and monitored the system.
The quantitative behaviours analysed were the following: number of right and wrong answers and the children’s response time. The response time was counted from the time the robot gave the prompt to the time the child performed the correspondent facial expression.
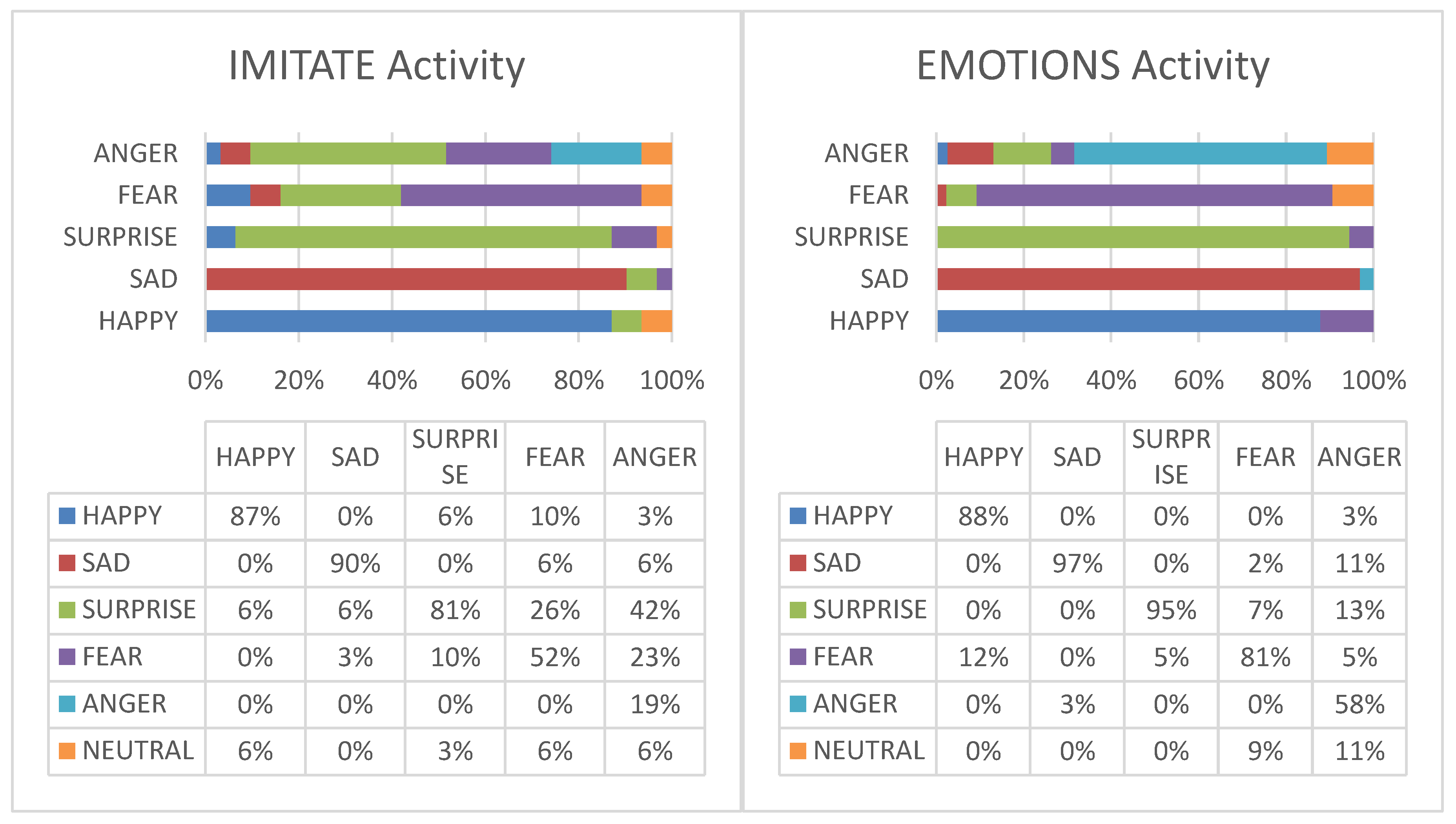
Figure 4 shows the results of the IMITATE and EMOTIONS game scenarios obtained with 31 typically developing children. The results show that, in general, the system performed well in both activities. Both activities had similar high recognition rates in the classes ‘Happy’, ‘Sad’, and ‘Surprise’—87% vs. 88%, 90% vs. 97%, and 81% vs. 95%, respectively for each class and activity. However, ‘Fear’ and ‘Anger’ had the lowest recognition rates in the activity IMITATE (52% and 19%, respectively), when comparing to the recognition rates of the same facial expressions in the activity EMOTIONS (81% and 58%, respectively).
Table 6 presents the children’s mean response time, and standard deviation (SD) in each activity for each facial expression. In general, the children presented similar response times in both activities for the ‘Happiness’ and ‘Sadness’ facial expressions, which means that these emotions are the easiest recognizable facial expressions. The children response time corresponding to the ‘Surprise’ and ‘Fear’ facial expressions slightly decreased in the activity EMOTIONS, since the children only had to express the emotion requested by ZECA, without the need to recognize it. Concerning the response time of the children when displaying the ‘Anger’ expression, the response time decreased in the EMOTIONS activity. Additionally, the children answered faster to the prompt in the EMOTIONS activity in comparison to the response time in the IMITATE activity.
By analysing the results, the low recognition rates of ‘Anger’ and ‘Fear’ in the activity IMITATE could probably be due to the fact that the children had to interpret the facial expression displayed by ZECA, perhaps meaning that they did not interpret well the facial expression, or the set of features contributing for the facial expression synthesized by ZECA was not well marked enough for the children to recognize. Moreover, these same facial expressions presented a higher recognition rate and were faster displayed by the children in the EMOTIONS activity. Additionally, in general, the children took more time performing the ‘Anger’ expression in the activity IMITATE compared to the other facial expressions.
4.3. Exploratory Study with Children with ASD
This experimental phase (performed also in a school environment) had a twofold goal: to verify if the system can implement a procedure that makes the children able to interact in a comfortable and natural way and, on the other side, to evaluate the appropriateness of the system in a real environment with children with ASD. The main research question was: can the proposed system be used as an eligible tool in emotions recognition activities with children with ASD? This experimental study is crucial for the next steps in the research. In fact, only after concluding the study presented in this paper is it possible to proceed with further tests to infer the suitability of the proposed system as a complement to the traditional support sessions. The implementation of the proposed system in clinical support sessions must be performed with a larger sample, with a quantified recognition success rate and a quantified children evolution in terms of predefined behaviour indicators.
Following this trend, a set of preliminary experiments were carried out involving six children with ASD (high-functioning autism or Asperger’s syndrome) aged between 8 and 9, four boys and two girls. Based on the children’s skills and as recommended by the professionals, the original group of six was uniformly divided into two subsets of three children each (subset one, with children A, B, and C; subset two, with children D, E, and F). In subset one, three different facial expressions were investigated (anger, happiness, and sadness). On the other hand, in the subset two, five facial expressions were investigated (anger, fear, happiness, sadness, and surprised). The facial expressions were asked or performed randomly by the robot (EMOTIONS and IMITATE game scenarios, respectively). The experiments were performed individually in activities involving the professional, the robot, and the child. The robot had the role of mediator in the process of imitation and recognition of facial expressions. The professional only intervened if necessary to “regulate” a child’s behaviour. The researcher supervises the progress of the activity and monitors the system.
Figure 5 shows the experimental configuration used where each child was placed in front of the robot. Seven sessions of two to three minutes each were performed.
The quantitative behaviours analysed were the following: number of right and wrong answers and the child’s response time per session. The response time was counted from the time the robot gave the prompt to the time the child performed the correspondent facial expression.
4.3.1. Results from Subset One
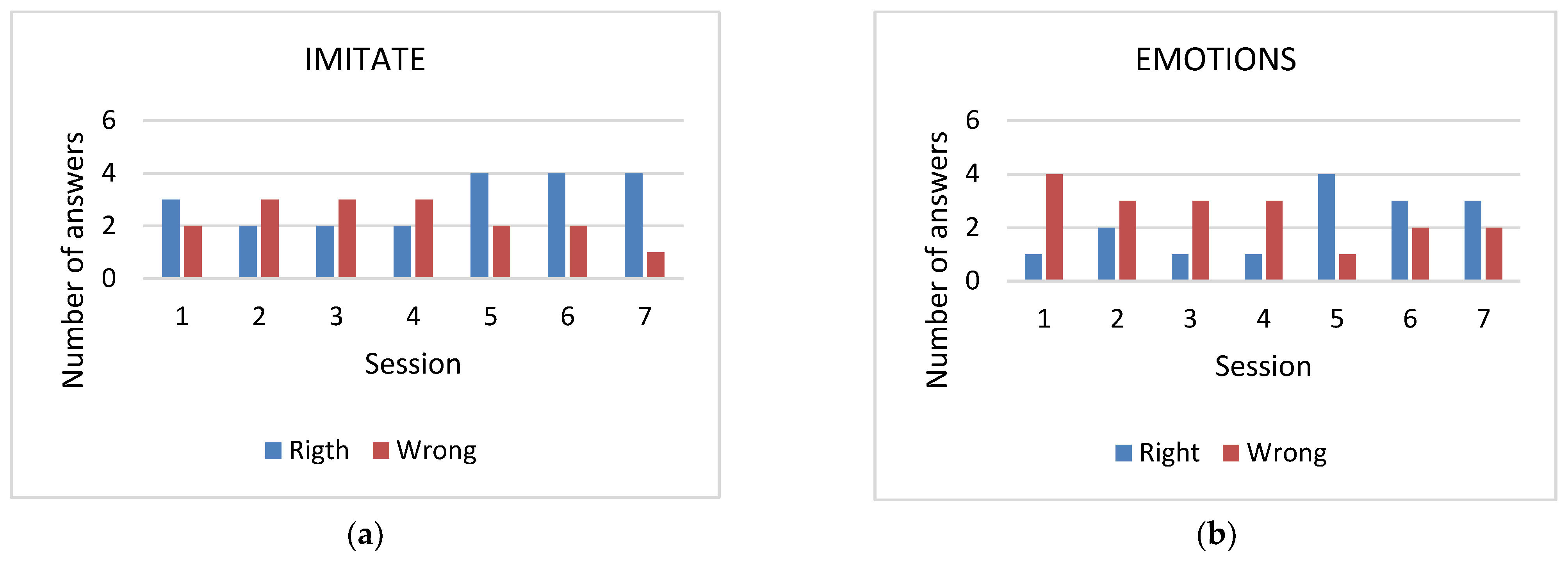
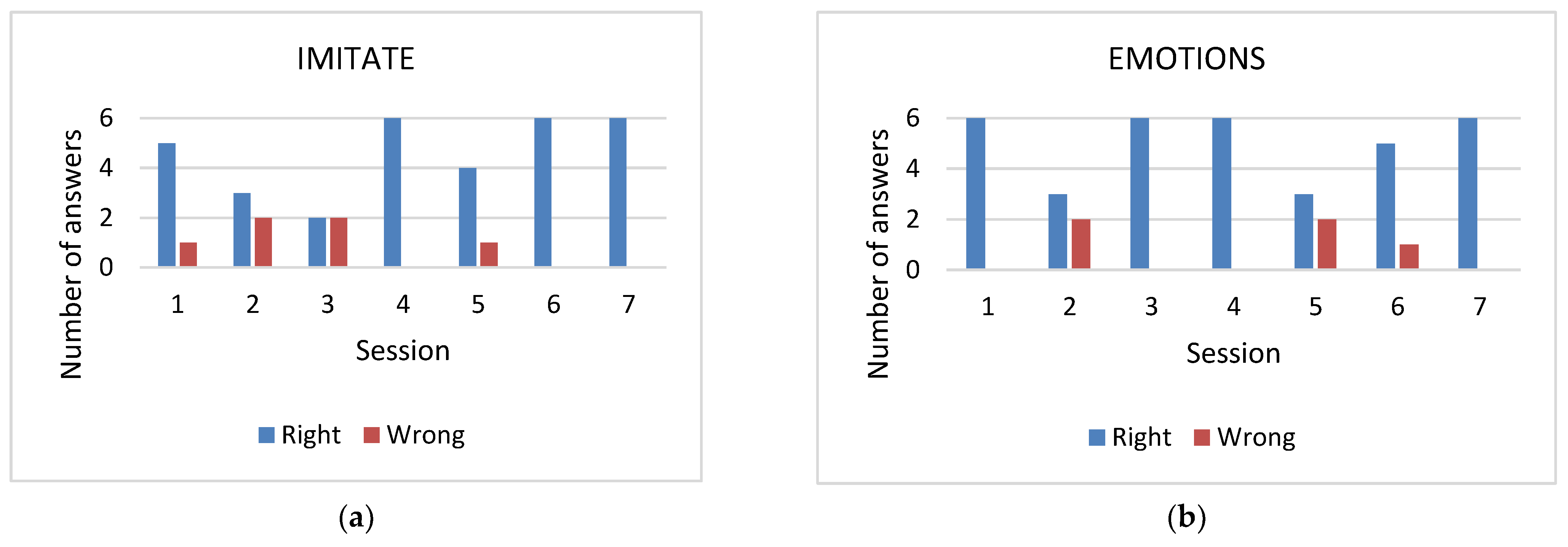
Figure 6 and
Figure 7 show the results of the two game scenarios obtained with two of the three children (A and B) from the subset one. The results of child C were inconclusive as most sessions were unsuccessfully ended. The child did not perform as expected, since he was more attracted by the robot components or he was tired/annoyed, and consequently he was not focused on the activity.
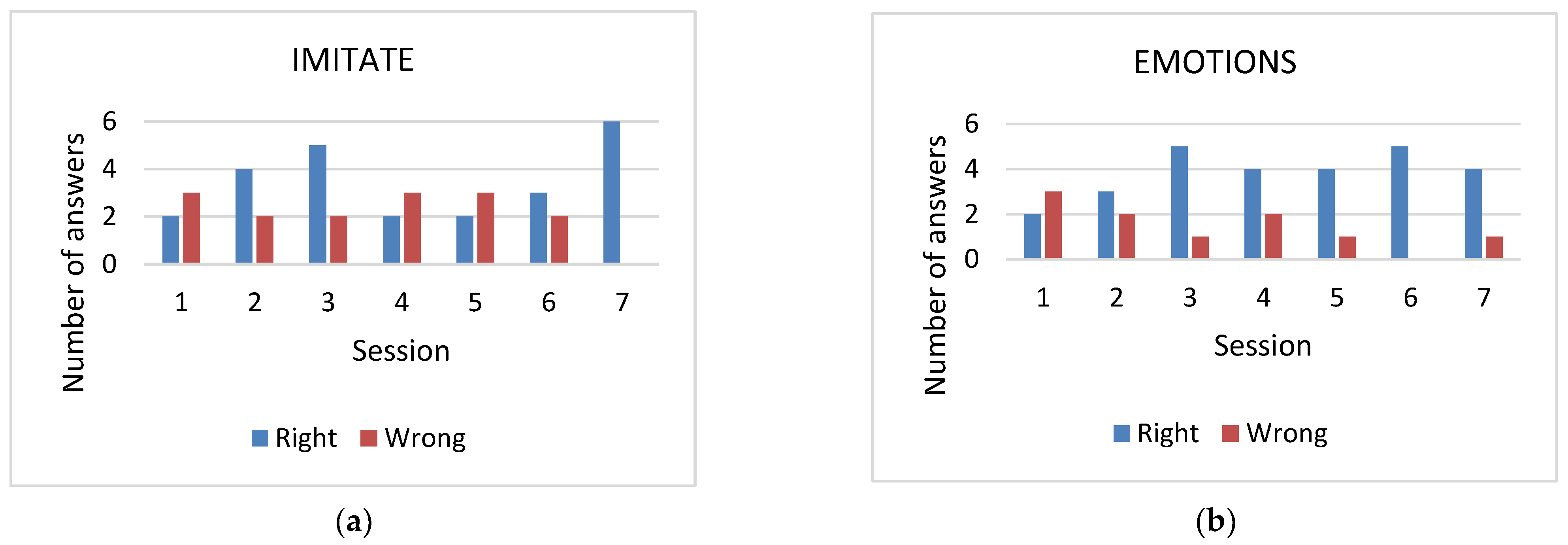
The results in
Figure 6, on the left, show that in the first session child A gave more incorrect answers than correct ones, whereas child B gave slightly more correct answers in the same session (
Figure 7 on the left). Then, in the following sessions the performance of child A slightly improved by having more correct answers than incorrect. However, the performance of child B slightly worsened, improving only in the last three sessions. Conversely, in session 4 and 5, the progress of the child A slightly worsened, by giving more incorrect answers. In the last session, both children had a good performance. It is possible to conclude that the overall performance of the child A in the IMITATE activity fluctuated with a good performance in the last session, whereas by analysing the results of the same activity for the child B there was a positive evolution. In the EMOTIONS activity,
Figure 6 and
Figure 7 on the right, child A had a distinctly better performance than child B in the first sessions. Considering the last three sessions, the performance of child B improved, equalling up to the performance of the child A. It is possible to infer that both children had a positive evolution in the EMOTIONS activity. Some difference in performance is consistent with the fact that the effects of ASD and the severity of symptoms differ from person to person [
1].
Table 7 and
Table 8 present children’s mean response time, and standard deviation (SD) of successful answers in the activities IMITATE and EMOTIONS, given in each session. Both participants took more time answering to the prompt in the last session, Session 7. Child A was usually faster to answer the prompt from the robot than child B. Additionally, it is possible to see that in the last three sessions on the EMOTIONS activity, where the participants took more time at performing the facial expression asked, the performance improved in both cases, having more correct answers than incorrect ones (
Figure 6 and
Figure 7).
4.3.2. Results from Subset Two
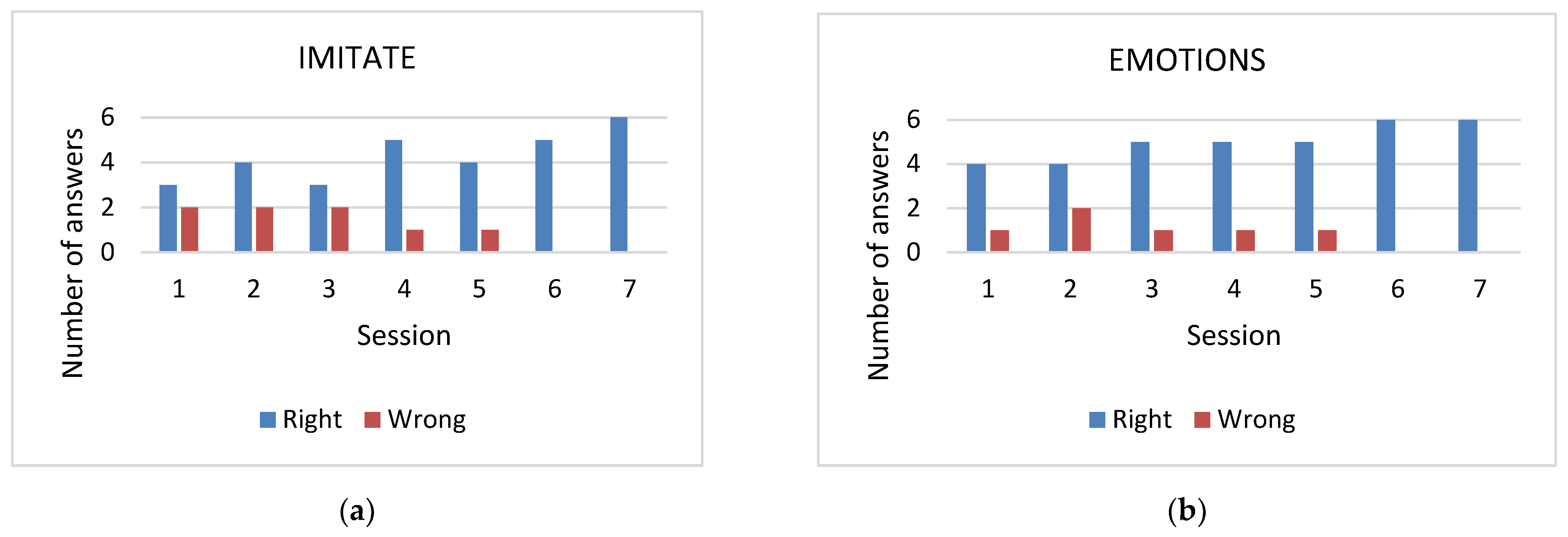
Figure 8,
Figure 9 and
Figure 10 show the results of the two game scenarios obtained with the three children (D, E, and F) from the subset two.
By analysing the performance of the three children in the activity IMITATE, children D and F had a positive evolution, whereas the performance of the child E fluctuated, having an overall good performance. In the EMOTIONS activity, the three children had, in general, a good performance over the sessions. In particular, child F had a more notable positive evolution. This child improved his performance in displaying the anger facial expression, since until the last two sessions he did not correctly perform the anger expression.
Table 9 and
Table 10 present the children’s mean response time, and standard deviation (SD), in the activities IMITATE and EMOTIONS, of successful answers given in each session. All children took more time answering to the prompt in the last session, Session 7. Child D was usually faster to answer the prompt from the robot than his partners.
Regarding the qualitative analysis, the children’s first reaction to the robot in the first session was positive: they were interested in the face of the robot, touching it repeatedly and always in a gentle way. None of the children abandoned the room. Moreover, with the exception of child C from the first subset, none of the participants got up out of the chair during the sessions, indicating, in general, that they were interested in the activity.
Comparing with other studies in the literature, the authors from the work [
32] tested a facial expression module for a robotic platform (Zeno R25) in a preliminary study involving three high functioning children with ASD within the ages of 8–13 years old during two sessions. The facial expressions tested were anger, fear, happiness, and sadness. The results obtained from their study allowed to conclude that the success rate increased from the first to the second session, which are similar results to the present work. Conversely, the children’s response time to each robot prompt decreased between sessions, which may be due to the fact that the facial expressions were consecutively imitated 4 times by the children. In the present work, in order to mitigate the repetition factor and memorization, the facial expressions were randomly generated by the robot which may imply the increase in the children’s response time between the first and the last session (sessions 1 and 7).
5. Conclusions
Facial expressions are a basic source of information about human emotional state. Failure of the emotion recognition skills might have consequences in a child’s social development and learning [
22]. In fact, individuals with ASD usually have difficulties in perceiving emotional expressions in their peers.
Assistive robots can be a useful tool to develop social–emotional skills in the support process of children with ASD. Currently, assistive robots are getting “more emotional intelligent” since affective computing has been employed, allowing to build a connection between the emotionally expressive human and the emotionally lacking computer.
The purpose of this study was to develop a system capable of automatically detecting facial expressions through facial cues and to interface the described system with a robotic platform in order to allow social interaction with children with ASD. To achieve the proposed goals, an experimental layout that uses the Intel® RealSense™ 3D sensor and the ZECA robot was developed. This system uses SVM technique to automatically classify, in real-time, the emotion expressed by the user.
The developed system was tested in different configurations in order to assess its performance. The system was first tested in simulation using MATLAB and the performance of the two kernels was compared. RBF presented the best results, as the relation between class labels and attributes is nonlinear, with an average accuracy of 93.6%. Although using different experimental configurations, the present work achieved similar results of the state of art.
Then, the real-time subsystem was tested in a laboratorial environment with a set of 14 participants, obtaining an overall accuracy of 88%. The required time for the system to efficiently perform facial expression recognition is 1–3 ms at a frame rate of 30 fps on an i5 quad-core CPUs with 16 GB RAM. Then, the proposed subsystem was compared to other state-of-the-art 3D facial expression recognition development in terms of overall accuracy, obtaining a performance of 88% against 84%, respectively.
An initial experimental study was conducted with typically developing children in a school environment with a main goal of testing the system, to detect the system constraints in a support session. The results obtained in this initial experimental phase showed that in the activity IMITATE all the facial expressions with exception of ‘Anger’ and ‘Fear’ had high recognition rates. The lower recognition rates of ‘Anger’ and ‘Fear’ could probably be due to the fact that the children had to interpret the facial expression displayed by ZECA, meaning perhaps that they did not interpret well the facial expression or the set of features contributing for the facial expression synthesized by ZECA was not well marked enough for the children to recognize. Moreover, these same facial expressions presented a higher recognition rate and were faster displayed by the children in the EMOTIONS activity.
Finally, an exploratory study, involving six children with ASD aged between eight and nine, was conducted in a school environment in order to evaluate the two game scenarios: the IMITATE, where the child has to mimic the ZECA’s facial expression, and EMOTIONS, where the child has to perform the facial expression asked by ZECA. The original group of six was uniformly divided into two subsets of three children (one and two). In the subset one, three different facial expressions were investigated (anger, happiness, and sadness). On the other hand, in the subset two, five facial expressions were investigated (anger, fear, happiness, sadness, and surprised). The effects of ASD and the severity of symptoms differ from person to person, so it is expected that each child presents a unique pattern of progress throughout the sessions. Indeed, the results show that each child had a different learning progress. For example, one of the children (B) experienced more difficulties than the other children in the first sessions. However, in the last two sessions his/her performance improved and in fact, by analysing the results from both subsets, it is possible to infer that, in general, children had a positive evolution over the sessions, more expressed in the subset 2. In general, all children took more time answering to the prompt in the last session. The increase of the response time over the sessions might be related to the children thinking and considering all options they had available.
The results obtained allowed to conclude that the proposed system is able to interact with children with ASD in a comfortable and natural way, giving a positive indication about the use of this particular system in the context of emotions recognition and imitation skills. Although the sample is small (and further tests are mandatory), the results point out that the proposed system can be used as an eligible mediator in emotions recognition activities with children with ASD.
Therefore, future research should conduct more experiments to conclude the suitability of the proposed system to be used as a complement to the traditional interventions and use larger sample sizes in order to increase the reliability and replicability of data.



 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
