
A Trustworthy Robot Buddy for Primary School Children

 ,
,
Abstract
:1. Introduction
2. Background
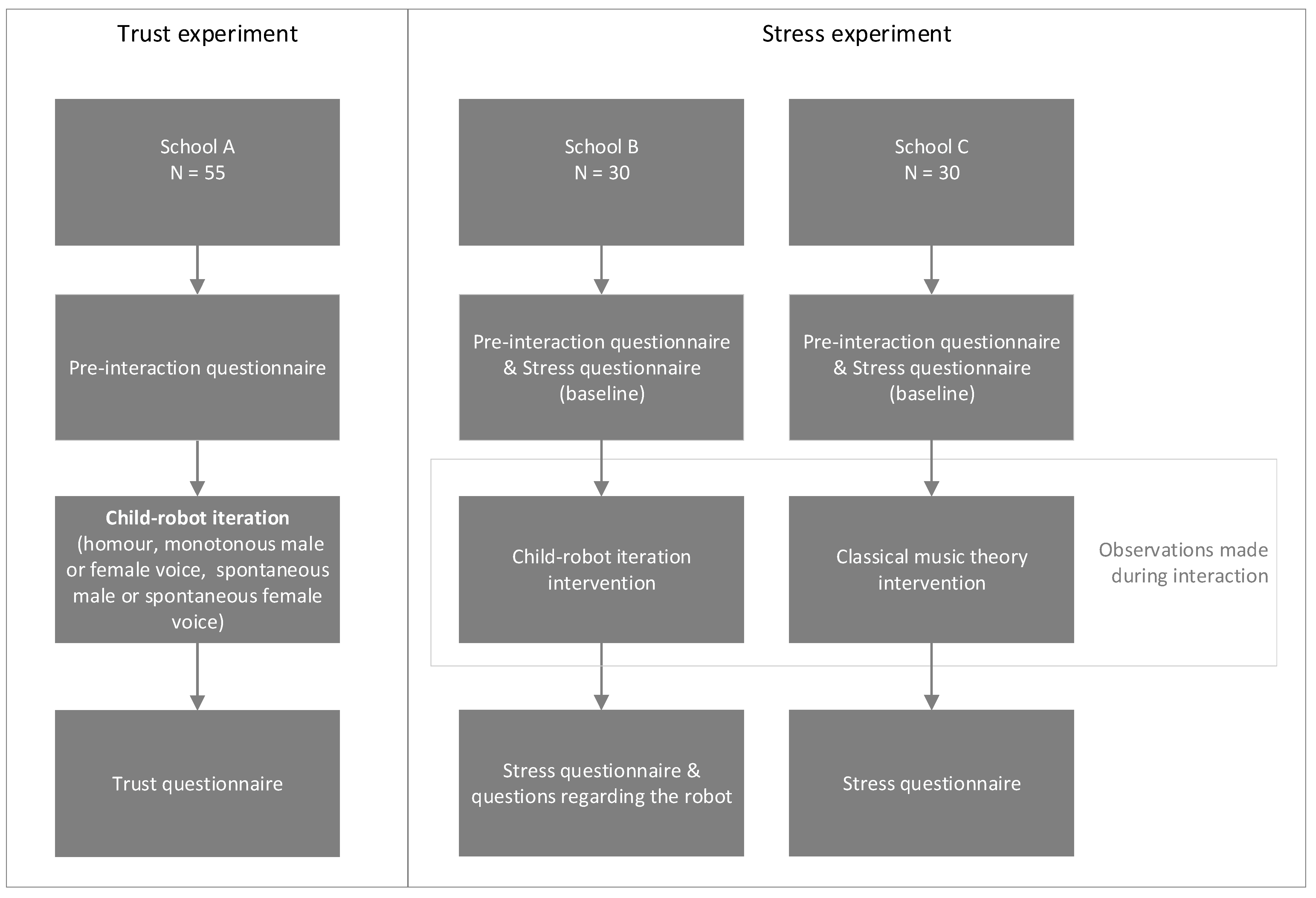
3. Methods
3.1. Participants
3.2. Materials
3.3. Robot
3.4. Procedure
4. Data Analysis
The Trust Experiment Scale
5. Results
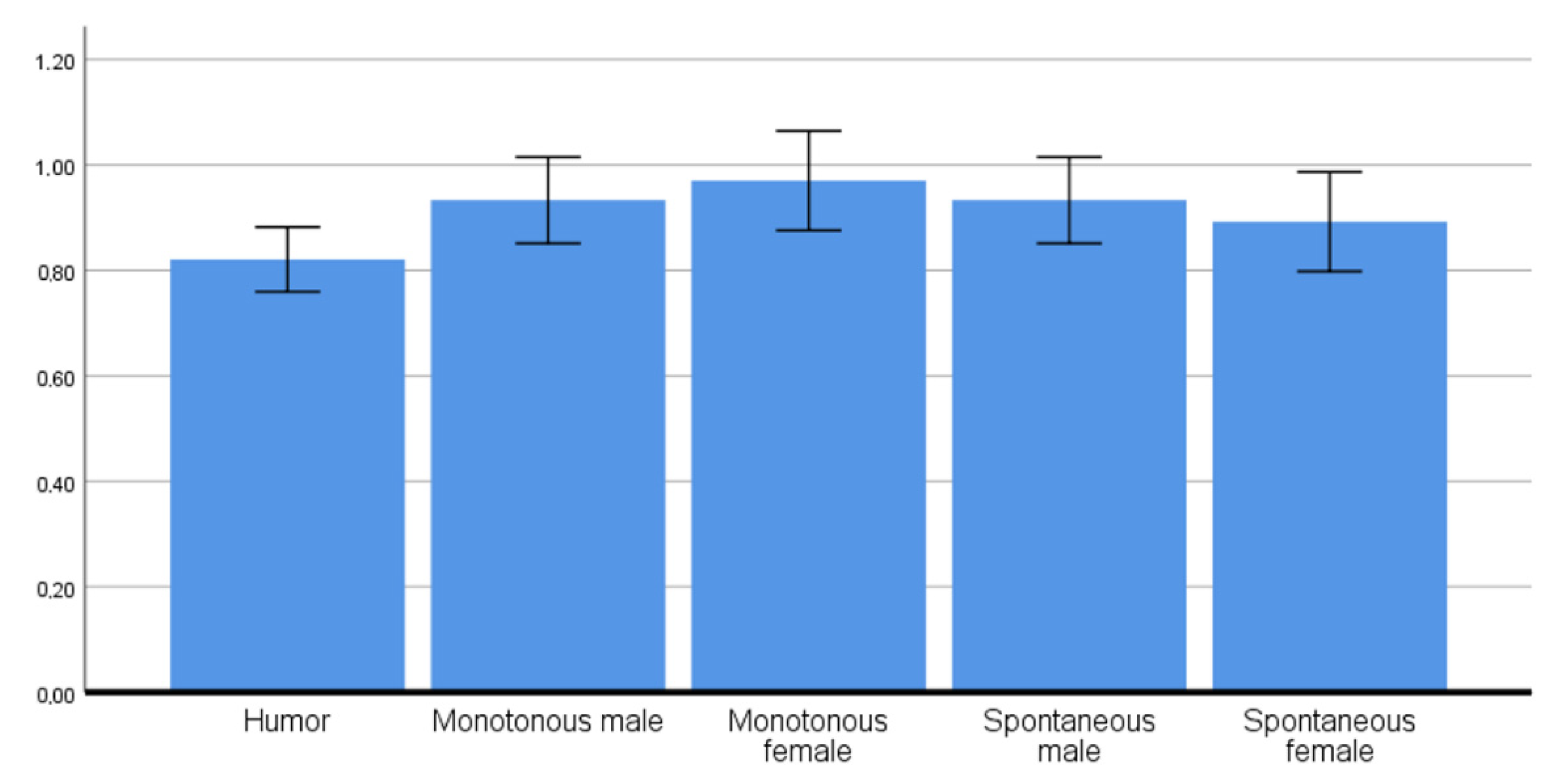
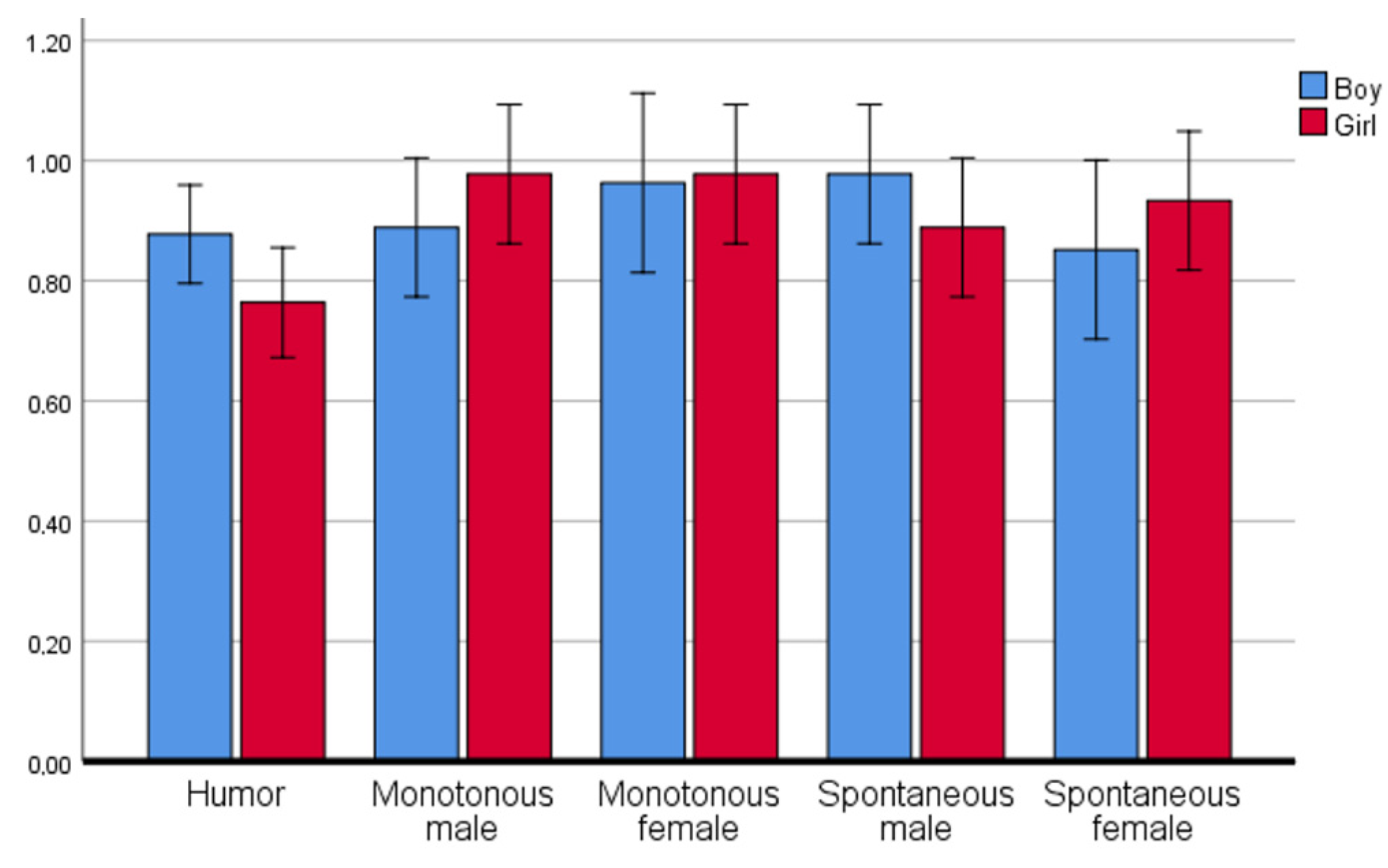
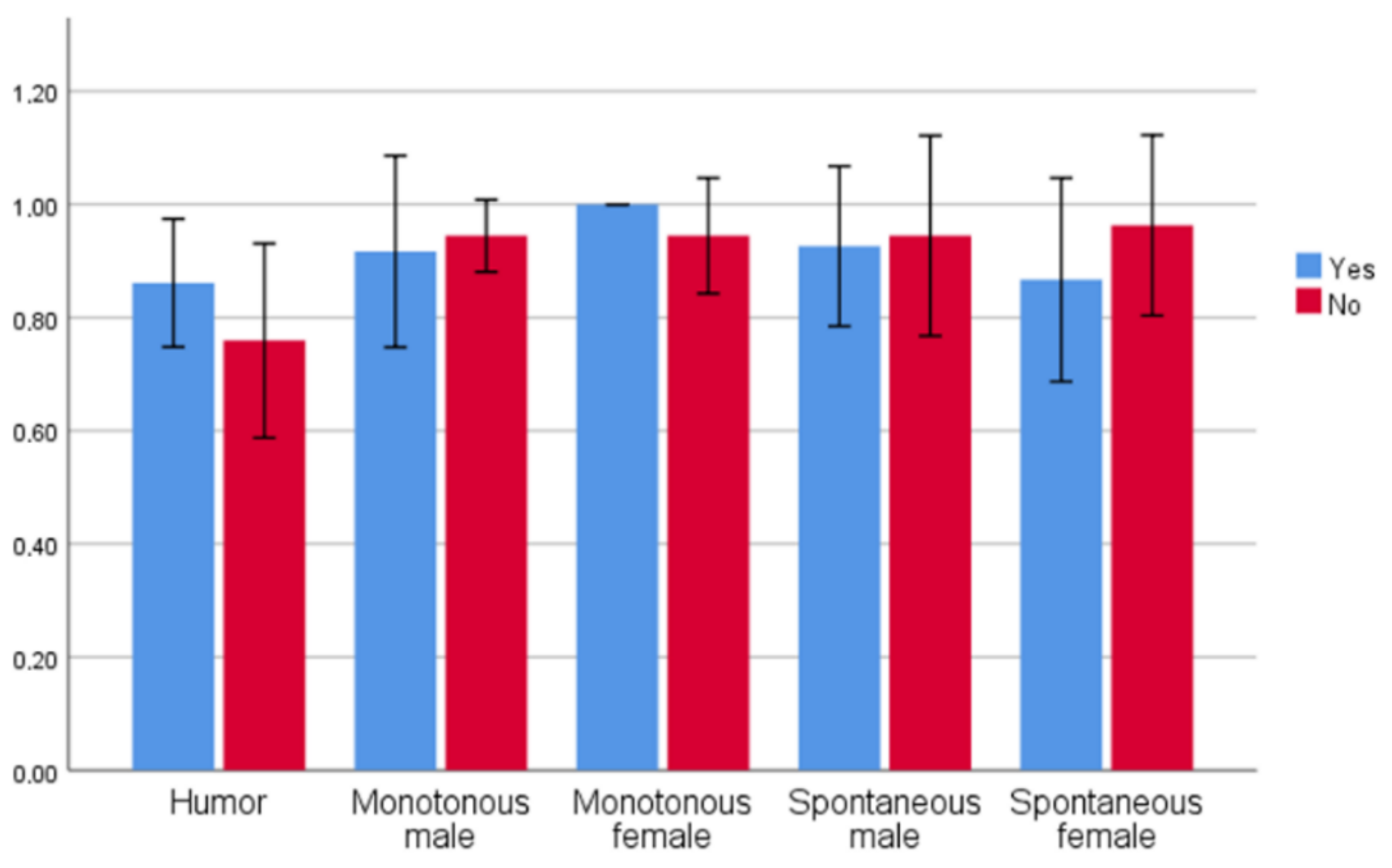
5.1. The Trust Experiment
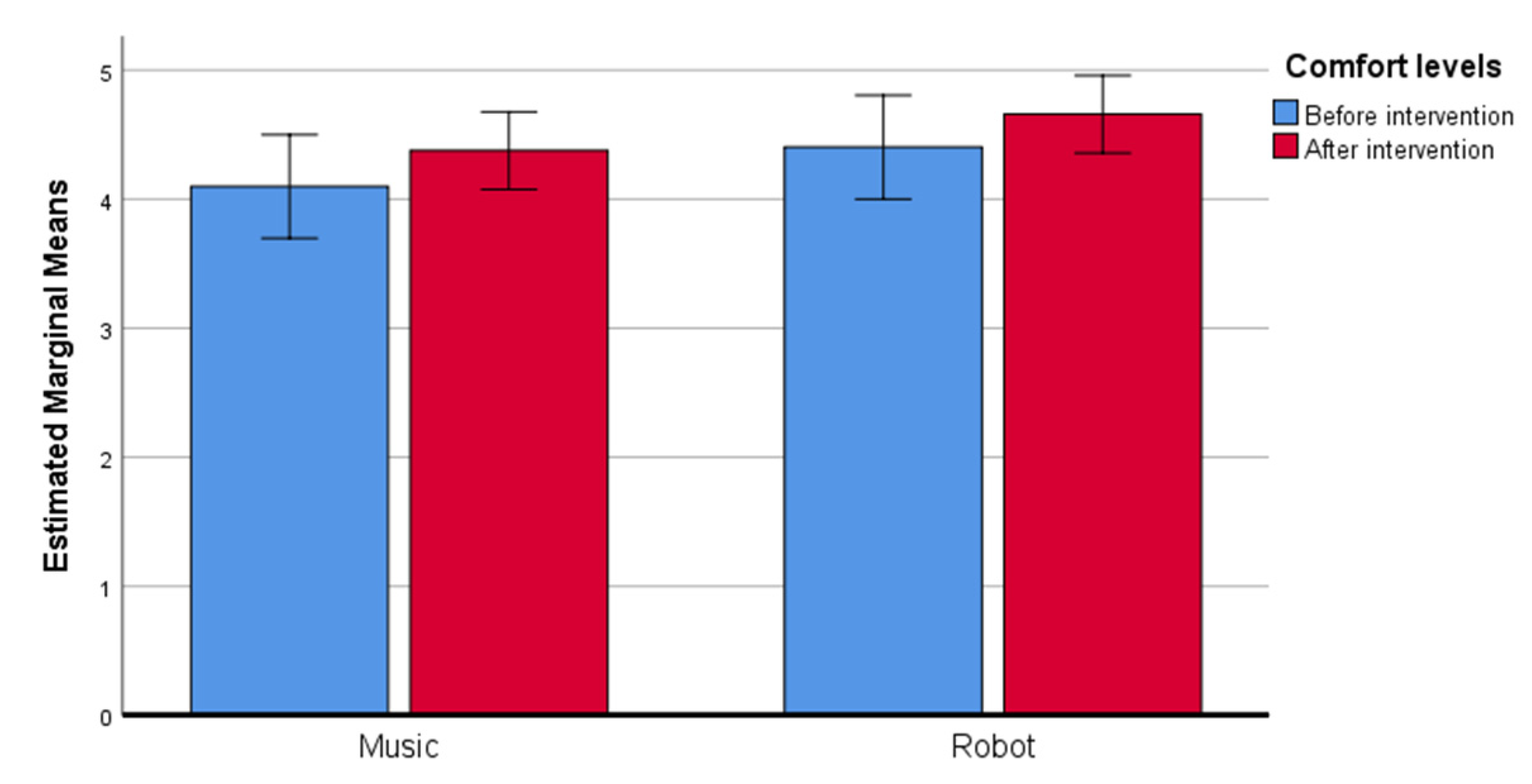
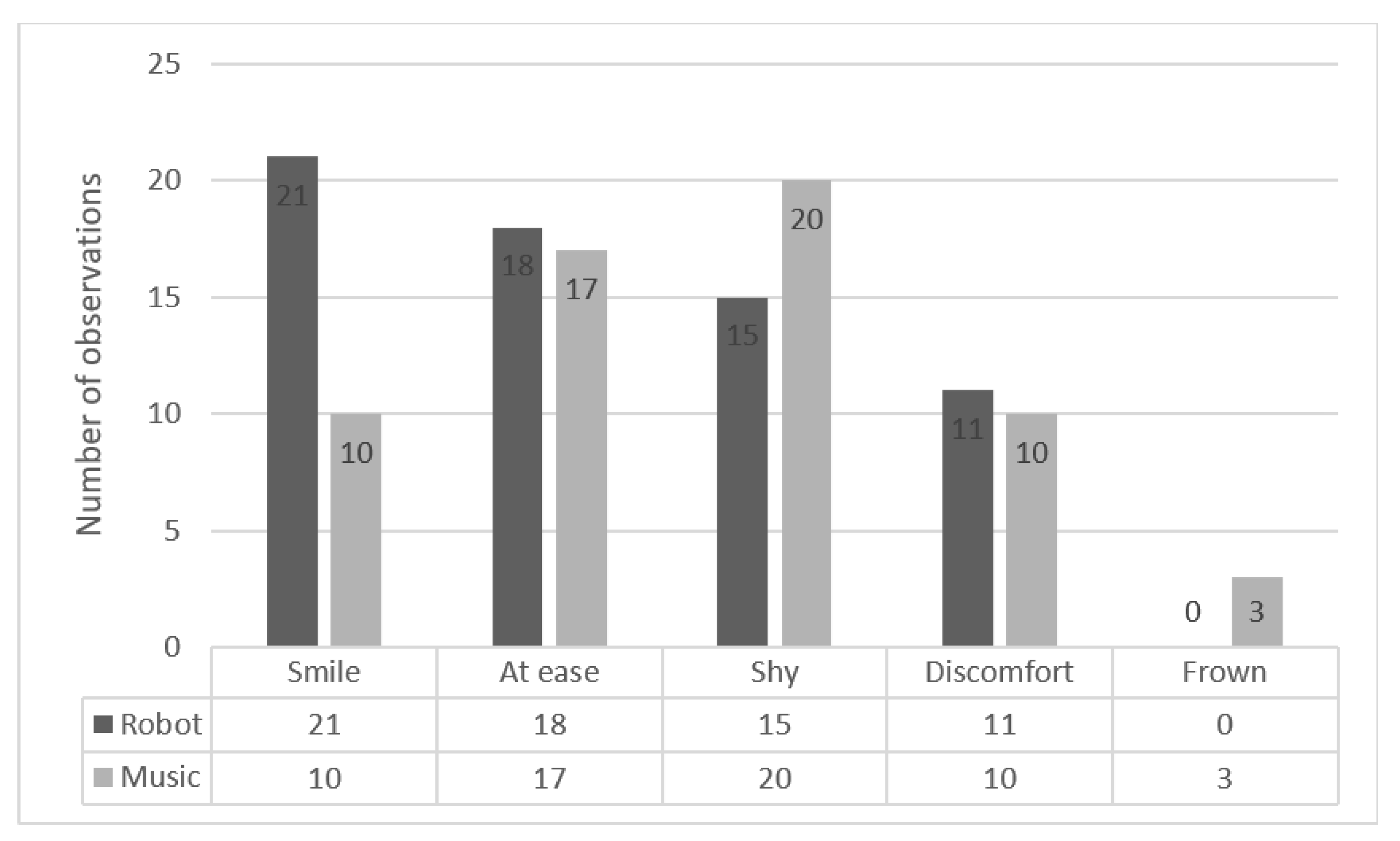
5.2. The Stress Experiment
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kennedy, J.; Baxter, P.; Senft, E.; Belpaeme, T. Social robot tutoring for child second language learning. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 231–238. [Google Scholar] [CrossRef]
- Konijn, E.A.; Jansen, B.; Bustos, V.M.; Hobbelink, V.L.N.F.; Vanegas, D.P. Social Robots for (Second) Language Learning in (Migrant) Primary School Children. Int. J. Soc. Robot. 2021, 1–17. [Google Scholar] [CrossRef]
- Kim, Y.; Thayne, J.; Wei, Q. An embodied agent helps anxious students in mathematics learning. Educ. Technol. Res. Dev. 2017, 65, 219–235. [Google Scholar] [CrossRef]
- Paetzel, M.; Perugia, G.; Castellano, G. The Persistence of First Impressions: The Effect of Repeated Interactions on the Perception of a Social Robot. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 73–82. [Google Scholar] [CrossRef] [Green Version]
- Orobio de Castro, B.; Mulder, S.; Van der Ploeg, R.; Onrust, S.; Stoltz, S.; Buil, M.; de Wit, I.; Buitenhuis, L.; Cillessen, T.; Veenstra, R.; et al. Eindrapport Wat Werkt Tegen Pesten; Nationaal Regieorgaan Onderwijsonderzoek: Den Haag, The Netherlands, 2018; p. 96. [Google Scholar]
- Unnever, J.D.; Cornell, D.G. Middle School Victims of Bullying: Who Reports Being Bullied? Aggress. Behav. 2004, 30, 373–388. [Google Scholar] [CrossRef]
- Orobio de Castro, B.; Mulder, S.; van der Ploeg, R.; Onrust, S.; van den Berg, Y.; Slotz, S.; Marieke, B.; de Wit, I.; Buitenhuis, L.; Cillissen, T.; et al. 2018. Available online: eindrapport-wat-werkt-tegen-pesten.pdf (accessed on 10 March 2022).
- Elias, M.J. Schools as a Source of Stress to Children: An Analysis of Causal and Ameliorative Influences. J. Sch. Psychol. 1989, 27, 393–407. [Google Scholar] [CrossRef]
- Matheny, K.B.; Aycock, D.W.; McCarthy, C.J. Stress in School-Aged Children and Youth. Educ. Psychol. Rev. 1993, 5, 109–134. [Google Scholar] [CrossRef]
- Moerman, C.J.; van der Heide, L.; Heerink, M. Social Robots to Support Children’s Well-Being under Medical Treatment: A Systematic State-of-the-Art Review. J. Child Health Care 2019, 23, 596–612. [Google Scholar] [CrossRef]
- Vallès-Peris, N.; Angulo, C.; Domènech, M. Children’s Imaginaries of Human-Robot Interaction in Healthcare. Int. J. Environ. Res. Public Health 2018, 15, 970. [Google Scholar] [CrossRef] [Green Version]
- Scoglio, A.A.; Reilly, E.D.; Gorman, J.A.; Drebing, C.E. Use of Social Robots in Mental Health and Well-Being Research: Systematic Review. J. Med. Internet Res. 2019, 21, e13322. [Google Scholar] [CrossRef]
- Bethel, C.L.; Stevenson, M.R.; Scassellati, B. Secret-Sharing: Interactions between a Child, Robot, and Adult. In Proceedings of the 2011 IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, AK, USA, 9 October 2011; pp. 2489–2494. [Google Scholar]
- Benveniste, D.H. Theoretical Context. In Changing Substance Abuse and Criminal Behavior Through Therapeutic Relationships; Benveniste, D.H., Ed.; Palgrave Macmillan UK: London, UK, 2016; pp. 43–63. ISBN 978-1-137-53039-4. [Google Scholar]
- Goold, S.D.; Lipkin, M. The doctor-patient relationship. J. Gen. Intern. Med. 1999, 14, S26–S33. [Google Scholar] [CrossRef] [Green Version]
- Begum, M.; Serna, R.W.; Yanco, H.A. Are Robots Ready to Deliver Autism Interventions? A Comprehensive Review. Int. J. Soc. Robot. 2016, 8, 157–181. [Google Scholar] [CrossRef]
- Huijnen, C.A.G.J.; Lexis, M.A.S.; Jansens, R.; de Witte, L. Mapping Robots to Therapy and Educational Objectives for Children with Autism Spectrum Disorder. J. Autism Dev. Disord. 2016, 46, 2100–2114. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Salimi, Z.; Jenabi, E.; Bashirian, S. Are social robots ready yet to be used in care and therapy of autism spectrum disorder: A systematic review of randomized controlled trials. Neurosci. Biobehav. Rev. 2021, 129, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Ricks, D.; Colton, M. Trends and Considerations in Robot-Assisted Autism Therapy. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; p. 4359. [Google Scholar] [CrossRef]
- Scassellati, B.; Admoni, H.; Matarić, M. Robots for Use in Autism Research. Annu. Rev. Biomed. Eng. 2012, 14, 275–294. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kory Westlund, J.M.; Jeong, S.; Park, H.W.; Ronfard, S.; Adhikari, A.; Harris, P.L.; DeSteno, D.; Breazeal, C.L. Flat vs. Expressive Storytelling: Young Children’s Learning and Retention of a Social Robot’s Narrative. Front. Hum. Neurosci. 2017, 11, 295. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Siegel, M.; Breazeal, C.; Norton, M.I. Persuasive Robotics: The influence of robot gender on human behavior. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2563–2568. [Google Scholar] [CrossRef]
- Niculescu, A.; van Dijk, B.; Nijholt, A.; Li, H.; See, S.L. Making Social Robots More Attractive: The Effects of Voice Pitch, Humor and Empathy. Int. J. Soc. Robot. 2013, 5, 171–191. [Google Scholar] [CrossRef] [Green Version]
- Serholt, S.; Barendregt, W. Robots Tutoring Children: Longitudinal Evaluation of Social Engagement in Child–robot Interaction. In Proceedings of the 9th Nordic Conference on Human-Computer Interaction, Gothenburg, Sweden, 23–27 October 2016; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Kanda, T.; Hirano, T.; Ishiguro, H.; Eaton, D. Interactive Robots as Social Partners and Peer Tutors for Children: A Field Trial. Hum. Comput. Interact. 2004, 19, 61–84. [Google Scholar]
- Swift-Spong, K.; Wen, C.K.F.; Spruijt-Metz, D.; Matarić, M.J. Comparing Backstories of a Socially Assistive Robot Exercise Buddy for Adolescent Youth. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 1 August 2016; pp. 1013–1018. [Google Scholar]
- Serholt, S.; Barendregt, W.; Vasalou, A.; Alves-Oliveira, P.; Jones, A.; Petisca, S.; Paiva, A. The Case of Classroom Robots: Teachers’ Deliberations on the Ethical Tensions. AI Soc. 2017, 32, 613–631. [Google Scholar] [CrossRef] [Green Version]
- Bethel, C.L.; Henkel, Z.; Stives, K.; May, D.; Eakin, D.; Pilkinton, M.; Jones, A.; Stubbs-Richardson, M. Using Robots to Interview Children about Bullying: Lessons Learned from an Exploratory Study. In Proceedings of the Proceedings of 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26 August 2016. [Google Scholar]
- CBS StatLine—Ervaren gezondheid, zorggebruik en leefstijl bij kinderen tot 12 jaar. Available online: https://opendata.cbs.nl/statline/#/CBS/nl/dataset/83716NED/table?ts=1583492615186 (accessed on 25 February 2022).
- Dautenhahn, K. Roles and Functions of Robots in Human Society: Implications from Research in Autism Therapy. Robotica 2003, 21, 443–452. [Google Scholar] [CrossRef] [Green Version]
- Brščić, D.; Kidokoro, H.; Suehiro, Y.; Kanda, T. Escaping from Children’s Abuse of Social Robots. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 59–66. [Google Scholar] [CrossRef]
- Stower, R.; Calvo-Barajas, N.; Castellano, G.; Kappas, A. A Meta-Analysis on Children’s Trust in Social Robots. Int. J. Soc. Robot. 2021, 13, 1979–2001. [Google Scholar] [CrossRef]
- Heerink, M.; Krose, B.; Evers, V.; Wielinga, B. Measuring acceptance of an assistive social robot: A suggested toolkit. RO-MAN 2009. In Proceedings of the 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 528–533. [Google Scholar] [CrossRef]
- Hampes, W.P. The relationship between humor and trust. Humor 1999, 12, 253–260. [Google Scholar] [CrossRef]
- Stock, O.; Strapparava, C.; Nijholt, A. The April Fools’ Day Workshop on Computation Humour. 2002. Available online: https://research.utwente.nl/en/publications/the-april-fools-day-workshop-on-computational-humour-proceedings- (accessed on 10 March 2022).
- Kraus, M.; Kraus, J.; Baumann, M.; Minker, W. Effects of Gender Stereotypes on Trust and Likability in Spoken Human-Robot Interaction. In Proceedings of the Eleventh International Conference on Language Resources and Evaluation (LREC 2018), Miyazaki, Japan, 7–12 May 2018; Available online: https://www.aclweb.org/anthology/L18-1018 (accessed on 10 March 2022).
- Akalin, N.; Kristoffersson, A.; Loutfi, A. Do you feel safe with your robot? Factors influencing perceived safety in human-robot interaction based on subjective and objective measures. Int. J. Hum. Comput. Stud. 2022, 158, 102744. [Google Scholar] [CrossRef]
- Wang, W.; Liu, N.; Li, R.; Chen, Y.; Jia, Y. HuCoM: A Model for Human Comfort Estimation in Personalized Human-Robot Collaboration. In Proceedings of the ASME 2018 Dynamic Systems and Control Conference, Atlanta, GA, USA, 30 September–3 October 2018. [Google Scholar] [CrossRef]
- Wang, W.; Chen, Y.; Li, R.; Jia, Y. Learning and Comfort in Human–Robot Interaction: A Review. Appl. Sci. 2019, 9, 5152. [Google Scholar] [CrossRef] [Green Version]
- Dang, T.-H.-H.; Tapus, A. Coping with stress using social robots as emotion-oriented tool: Potential factors discovered from stress game experiment. In Social Robotics; Herrmann, G., Pearson, M.J., Lenz, A., Bremner, P., Spiers, A., Leonards, U., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2013; pp. 160–169. [Google Scholar] [CrossRef]
- Laban, G.; Ben-Zion, Z.; Cross, E.S. Social Robots for Supporting Post-Traumatic Stress Disorder Diagnosis and Treatment. Front. Psychiatry 2022, 12, 752874. [Google Scholar] [CrossRef] [PubMed]
- Rose, E.J.; Björling, E.A. Designing for engagement: Using participatory design to develop a social robot to measure teen stress. In Proceedings of the 35th ACM International Conference on the Design of Communication, Halifax, NS, Canada, 11–13 August 2017; pp. 1–10. [Google Scholar] [CrossRef]
- Phang, K. Toxic Stress: How the Body’s Response Can Harm a Child’s Development. Toxic Stress: How the Body’s Response Can Harm a Child’s Development. 13 July 2017. Available online: https://www.nationwidechildrens.org/family-resources-education/700childrens/2017/07/toxic-stress-how-the-bodys-response-can-harm-a-childs-development (accessed on 10 March 2022).
- Gebauer, L.; Kringelbach, M.L.; Vuust, P. Ever-changing cycles of musical pleasure: The role of dopamine and anticipation. Psychomusicol. Music. Mind Brain 2012, 22, 152–167. [Google Scholar] [CrossRef] [Green Version]
- Kemper, K.J.; Danhauer, S.C. Music as therapy. South. Med. J. 2005, 98, 282–289. [Google Scholar] [CrossRef]
- Beran, T.N.; Ramirez-Serrano, A.; Vanderkooi, O.G.; Kuhn, S. Reducing children’s pain and distress towards flu vaccinations: A novel and effective application of humanoid robotics. Vaccine 2013, 31, 2772–2777. [Google Scholar] [CrossRef]
- Farrier, C.E.; Pearson, J.D.R.; Beran, T.N. Children’s Fear and Pain During Medical Procedures: A Quality Improvement Study With a Humanoid Robot. Can. J. Nurs. Res. 2019, 52, 328–334. [Google Scholar] [CrossRef]
- Smakman, M.H.J.; Smit, K.; Buser, L.; Monshouwer, T.; van Putten, N.; Trip, T.; Schoof, C.; Preciado, D.F.; Konijn, E.A.; van der Roest, E.M.; et al. Mitigating Children’s Pain and Anxiety during Blood Draw Using Social Robots. Electronics 2021, 10, 1211. [Google Scholar] [CrossRef]
- Rau, P.P.; Li, Y.; Li, D. Effects of communication style and culture on ability to accept recommendations from robots. Comput. Hum. Behav. 2009, 25, 587–595. [Google Scholar] [CrossRef]
- Looije, R.; Neerincx, M.A.; De Lange, V. Children’s responses and opinion on three bots that motivate, educate and play. J. Phys. Agents (JoPha) 2008, 2, 13–20. [Google Scholar] [CrossRef] [Green Version]
- OSF Supplementary Materials, SAMbuddy Project. Available online: https://osf.io/h4jme/?view_only=1c27a4a25ff34dabaef5b9c3d515032e (accessed on 10 March 2022).
- Sim, G.; Horton, M. Investigating children’s opinions of games: Fun Toolkit vs. This or That. In Proceedings of the 11th International Conference on Interaction Design and Children, Bremen, Germany, 12–15 June 2013; pp. 70–77. [Google Scholar] [CrossRef]
- von Baeyer, C.L. Children’s Self-Reports of Pain Intensity: Scale Selection, Limitations and Interpretation. Pain Res. Manag. 2006, 11, 157–162. [Google Scholar] [CrossRef] [PubMed]
- Hall, L.; Hume, C.; Tazzyman, S. Five Degrees of Happiness: Effective Smiley Face Likert Scales for Evaluating with Children. In Proceedings of the Proceedings of the The 15th International Conference on Interaction Design and Children, Manchester, UK, 21 June 2016; pp. 311–321. [Google Scholar]
- SAMbuddy. Available online: https://vertelknuffel.nl/ (accessed on 18 February 2022).
- Field, A. Discovering Statistics Using IBM SPSS Statistics, 5th ed.; SAGE: Newcastle upon Tyne, UK, 2018; p. 1045. [Google Scholar]
- Nunnally, J.C. An Overview of Psychological Measurement. In Clinical Diagnosis of Mental Disorders: A Handbook; Wolman, B.B., Ed.; Springer US: Boston, MA, USA, 1978; pp. 97–146. ISBN 978-1-4684-2490-4. [Google Scholar]
- Hay, J. Functions of Humor in the Conversations of Men and Women. J. Pragmat. 2000, 32, 709–742. [Google Scholar] [CrossRef]
- Blackford, J.U.; Buckholtz, J.W.; Avery, S.N.; Zald, D.H. A Unique Role for the Human Amygdala in Novelty Detection. Neuroimage 2010, 50, 1188–1193. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Degnan, K.A.; Fox, N.A. Behavioral Inhibition and Anxiety Disorders: Multiple Levels of a Resilience Process. Dev. Psychopathol. 2007, 19, 729–746. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weierich, M.R.; Wright, C.I.; Negreira, A.; Dickerson, B.C.; Barrett, L.F. Novelty as a Dimension in the Affective Brain. Neuroimage 2010, 49, 2871. [Google Scholar] [CrossRef] [Green Version]
- Fox, N.A.; Henderson, H.A.; Marshall, P.J.; Nichols, K.E.; Ghera, M.M. Behavioral Inhibition: Linking Biology and Behavior within a Developmental Framework. Annu. Rev. Psychol. 2005, 56, 235–262. [Google Scholar] [CrossRef] [Green Version]
- Shin, G.; Feng, Y.; Jarrahi, M.H.; Gafinowitz, N. Beyond Novelty Effect: A Mixed-Methods Exploration into the Motivation for Long-Term Activity Tracker Use. JAMIA Open 2019, 2, 62–72. [Google Scholar] [CrossRef]
- Sharkey, A.J.C. Should we welcome robot teachers? Ethic. Inf. Technol. 2016, 18, 283–297. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Question | Answer | n | % |
|---|---|---|---|
| The robot is friendly. | Yes | 29 | 97% |
| No | 1 | 3% | |
| I felt comfortable with the robot. | Yes | 20 | 67% |
| No | 10 | 33% | |
| I would like to be friends with this robot. | Yes | 24 | 80% |
| No | 6 | 20% | |
| I like the robot’s physical appearance. | Yes | 25 | 83% |
| No | 5 | 17% | |
| The robot wanted to talk with me. | Yes | 26 | 87% |
| No | 4 | 13% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smakman, M.H.J.; Vanegas, D.F.P.; Smit, K.; Leewis, S.; Okkerse, Y.; Obbes, J.; Uffing, T.; Soliman, M.; van der Krogt, T.; Tönjes, L. A Trustworthy Robot Buddy for Primary School Children. Multimodal Technol. Interact. 2022, 6, 29. https://doi.org/10.3390/mti6040029
Smakman MHJ, Vanegas DFP, Smit K, Leewis S, Okkerse Y, Obbes J, Uffing T, Soliman M, van der Krogt T, Tönjes L. A Trustworthy Robot Buddy for Primary School Children. Multimodal Technologies and Interaction. 2022; 6(4):29. https://doi.org/10.3390/mti6040029
Chicago/Turabian StyleSmakman, Matthijs H. J., Daniel F. Preciado Vanegas, Koen Smit, Sam Leewis, Youri Okkerse, Jesper Obbes, Thom Uffing, Marina Soliman, Tony van der Krogt, and Lucas Tönjes. 2022. "A Trustworthy Robot Buddy for Primary School Children" Multimodal Technologies and Interaction 6, no. 4: 29. https://doi.org/10.3390/mti6040029
APA StyleSmakman, M. H. J., Vanegas, D. F. P., Smit, K., Leewis, S., Okkerse, Y., Obbes, J., Uffing, T., Soliman, M., van der Krogt, T., & Tönjes, L. (2022). A Trustworthy Robot Buddy for Primary School Children. Multimodal Technologies and Interaction, 6(4), 29. https://doi.org/10.3390/mti6040029