
HoberUI: An Exploration of Kinematic Structures as Interactive Input Devices


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
2.1. Reconfigurable Interfaces and Controllers
2.2. Deployable Kinematic Structures
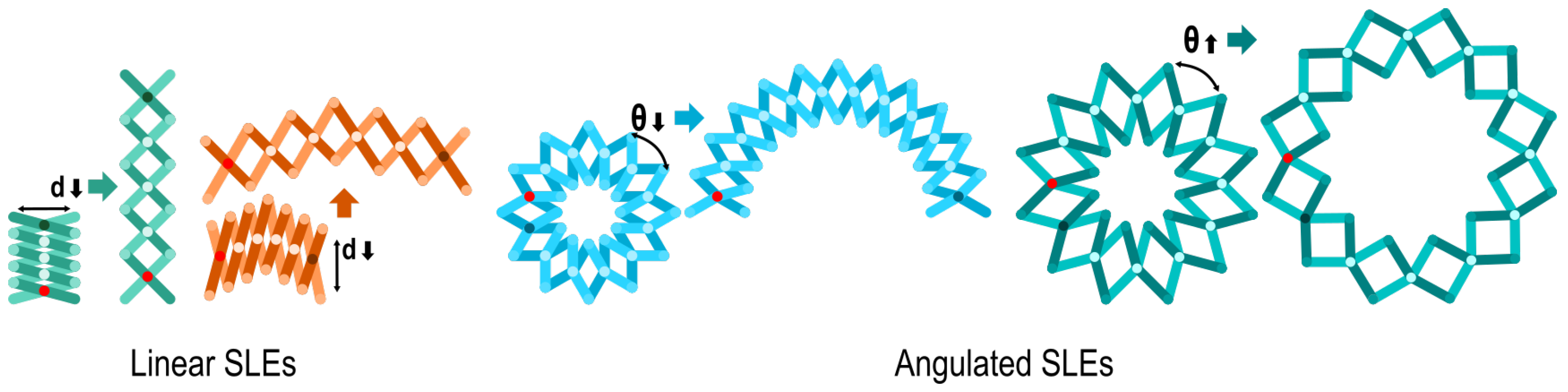
2.3. Scissor-like Elements (SLEs)
3. HoberUI Implementation
3.1. Hardware Implementation
3.1.1. Hoberman Sphere
3.1.2. Input Sensing
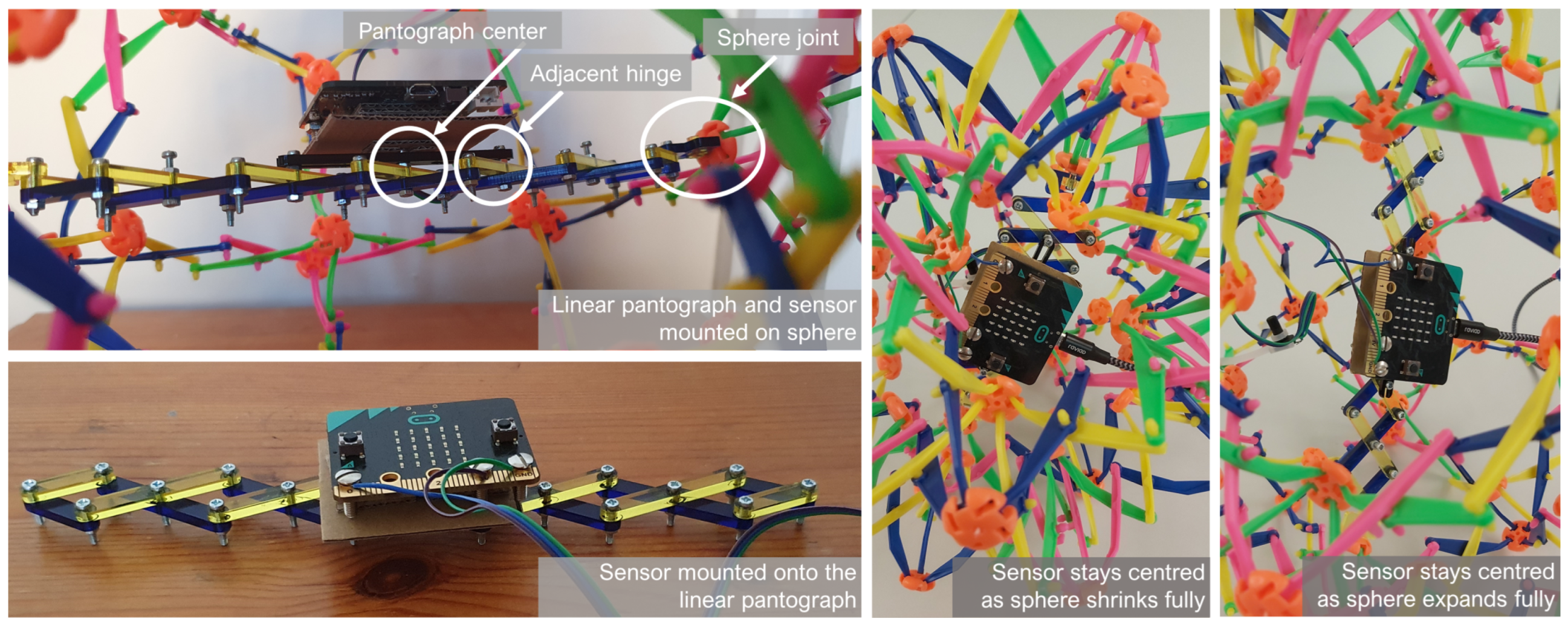
- Shape state: The shape state of the Hoberman sphere is described by its diameter. This can be described by measuring the angle between the rigid links that constitute any of the SLEs of the Hoberman sphere. We used a single-turn potentiometer to measure this angle. The mechanical assembly (see Figure 3) consists of two rigid elements attached to adjacent hinge-points and forming a SLE linked together by the potentiometer as the hinge axis.As an isokinetic structure, the change in shape state of HoberUI always produces an exact parametric change in the potentiometer resistance. The micro:bit senses the change in resistance via one of its onboard analogue input pins. We also considered alternatives like a Force Sensitive Resistor (FSR), bend sensors and rotary encoders. However, we chose the SLE-mounted potentiometer as it presented as a more elegant solution.
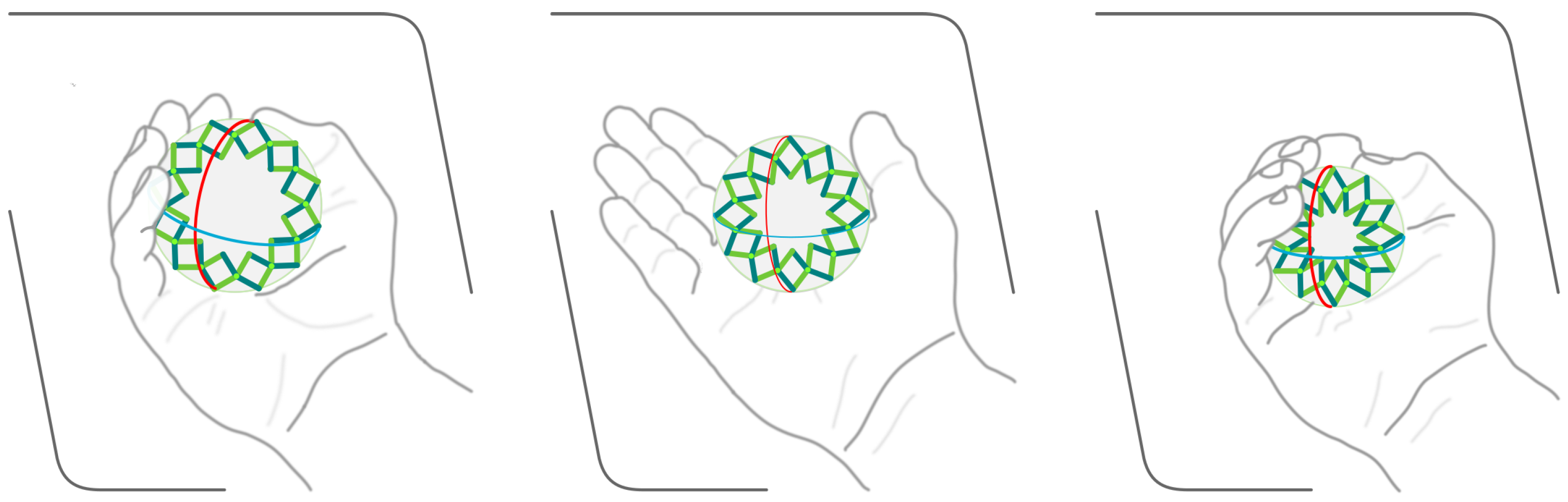
- Orientation: Orientation is sensed using a sensor-fusion approach inspired by Birdy [42] and PALLA [43]. The micro:bit provides tri-axis accelerometer and magnetometer readings based on the relative orientation of the micro:bit. We compute the orientation using the assumption that in the steady state, the only force acting on the accelerometer is gravity. In the default “upright” state, the gravity vector is parallel to the -Z axis of the micro:bit and has a fixed magnitude. When the HoberUI device is rotated, the accelerometer output changes. We can infer the axis angle of orientation as the transform needed to re-align the gravity vector from the -Z axis to the current accelerometer vector. This computation works for detecting orientation while the current accelerometer vector’s magnitude is within a threshold of the original fixed magnitude. The magnetometer provides the additional DoFs needed to resolve rotation when the rotation axis is parallel to the gravity vector.
- Position: When the user performs translation of the HoberUI device (i.e., a heave gesture), they exert a detectable force on the HoberUI device. This force alters the magnitude of the accelerometer vector. If this magnitude exceeds a fixed threshold, we treat it as a change in position. We compute the direction of motion by treating the current accelerometer vector as a sum of the last detected gravity vector (known at the start of the gesture) and the accelerometer’s response to the movement. The duration of the movement integrated with the magnitude of acceleration can be used to infer an approximation of the position. This approach is adequate to detect a heave action. Within the 6DoF motion literature, heave is one of the three named position-related movements. However, in the context of our discussion, all three movements are referred to as heave. A higher-precision DoF sensor could detect precise position if essential for the target application.
3.2. Sensor Mounting
3.3. Software Implementation
Input Processing
4. Interacting with HoberUI
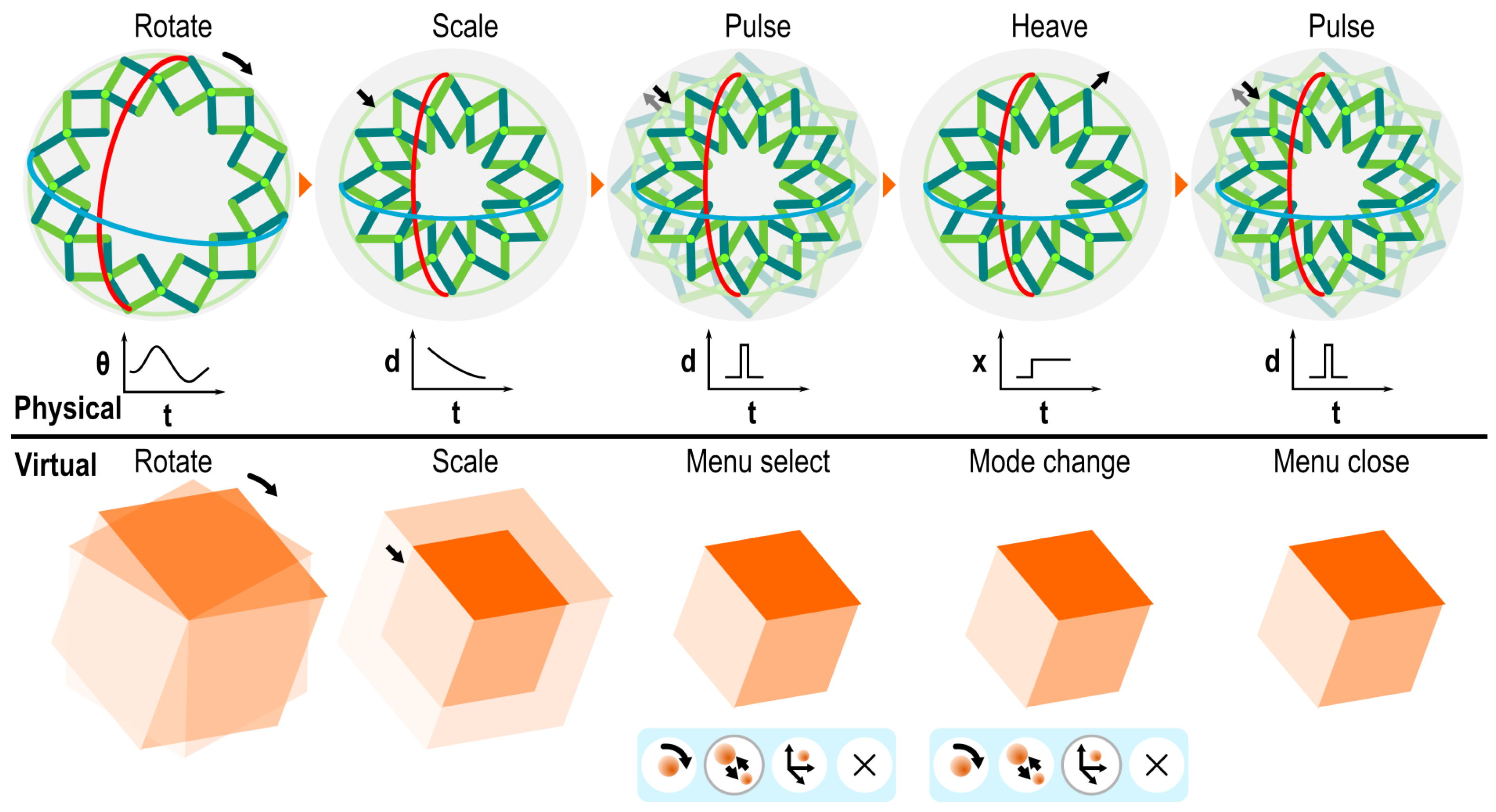
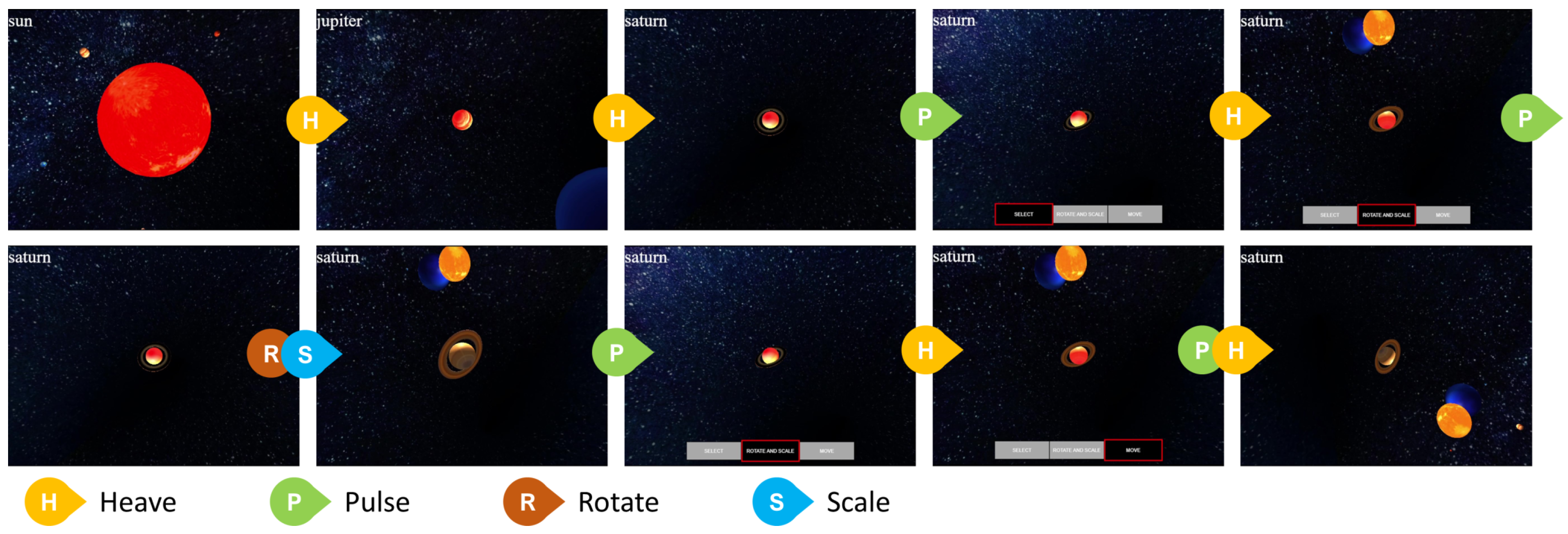
4.1. Mapping Physical Action to 3D Environments
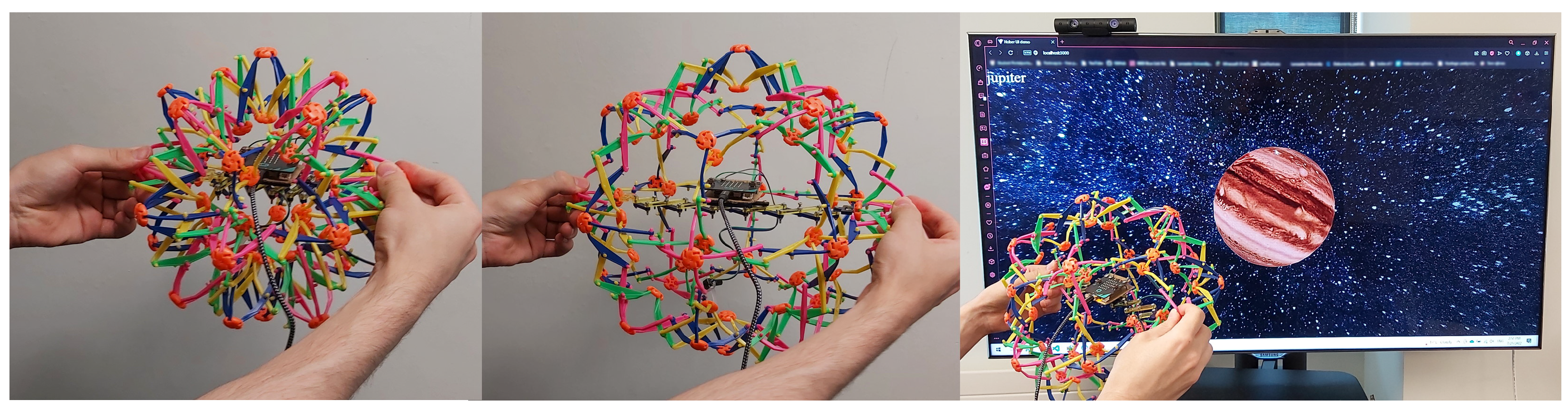
4.2. Solar System Demostrator Application
5. User Study
5.1. Participants
5.2. Procedure
- To rotate and scale the solar system;
- To make the planet Uranus the size of the Sun or bigger;
- To simulate a Solar eclipse by moving the Earth so the moon blocks the sun;
- To move the planet Neptune closer to the Sun.
5.3. Data Analysis
5.4. Results
5.4.1. Overall Impression of the Device
5.4.2. Physical Properties of HoberUI
5.4.3. UX of Physical Features Mapping to Virtual Actions
5.4.4. Suggestions for Improvements and Alternatives
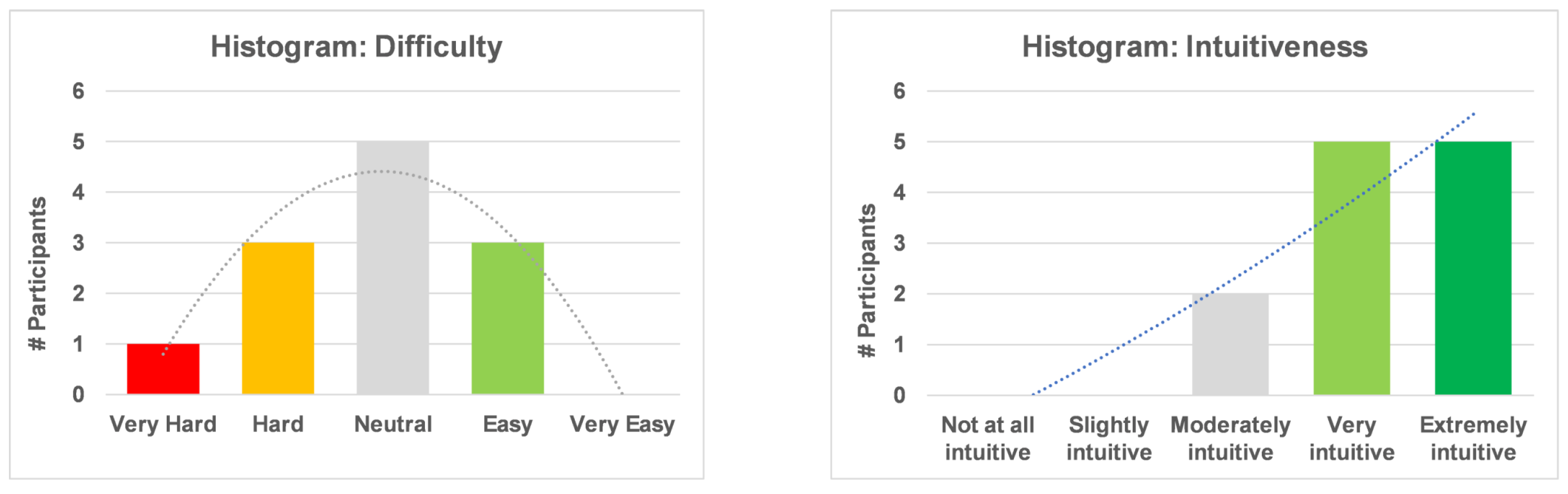
5.5. Likert Scale Results
6. Discussion
6.1. Limitations
6.2. Future Directions
6.2.1. Mini and Macro HoberUIs
6.2.2. Generalization to Other Applications
6.2.3. Generalization to Kinematic Configurations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fenci, G.E.; Currie, N.G. Deployable structures classification: A review. Int. J. Space Struct. 2017, 32, 112–130. [Google Scholar] [CrossRef]
- del Grosso, A.E.; Basso, P. Deployable Structures. Adv. Sci. Technol. 2013, 83, 122–131. [Google Scholar] [CrossRef]
- Kent, E. Periodic Kinematic Structures. Ph.D. Thesis, Technion, Israel Institute of Technology, Haifa, Isreal, 1983. [Google Scholar]
- Mruthyunjaya, T. Kinematic structure of mechanisms revisited. Mech. Mach. Theory 2003, 38, 279–320. [Google Scholar] [CrossRef]
- Swaminathan, S.; Rivera, M.; Kang, R.; Luo, Z.; Ozutemiz, K.B.; Hudson, S.E. Input, Output and Construction Methods for Custom Fabrication of Room-Scale Deployable Pneumatic Structures. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2019, 3, 62. [Google Scholar] [CrossRef]
- Perovich, L.; Mothersill, P.; Farah, J.B. Awakened Apparel: Embedded Soft Actuators for Expressive Fashion and Functional Garments. In Proceedings of the 8th International Conference on Tangible, Embedded and Embodied Interaction, TEI ’14, Munich, Germany, 16–19 February 2014; pp. 77–80. [Google Scholar] [CrossRef]
- Lin, J.; Zhou, J.; Koo, H. Enfold: Clothing for People with Cerebral Palsy. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2015 ACM International Symposium on Wearable Computers, UbiComp/ISWC’15 Adjunct, Osaka, Japan, 7–11 September 2015; pp. 563–566. [Google Scholar] [CrossRef]
- Roudaut, A.; Reed, R.; Hao, T.; Subramanian, S. Changibles: Analyzing and Designing Shape Changing Constructive Assembly. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, CHI ’14, Toronto, ON, Canada, 26 April–1 May 2014; pp. 2593–2596. [Google Scholar] [CrossRef]
- Dias, M.A.; McCarron, M.P.; Rayneau-Kirkhope, D.; Hanakata, P.Z.; Campbell, D.K.; Park, H.S.; Holmes, D.P. Kirigami actuators. Soft Matter 2017, 13, 9087–9092. [Google Scholar] [CrossRef] [PubMed]
- Chang, Z.; Ta, T.D.; Narumi, K.; Kim, H.; Okuya, F.; Li, D.; Kato, K.; Qi, J.; Miyamoto, Y.; Saito, K.; et al. Kirigami Haptic Swatches: Design Methods for Cut-and-Fold Haptic Feedback Mechanisms. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, CHI ’20, Honolulul, HI, USA, 25–30 April 2020; pp. 1–12. [Google Scholar] [CrossRef]
- Zheng, C.; Oh, H.; Devendorf, L.; Do, E.Y.L. Sensing Kirigami. In Proceedings of the 2019 on Designing Interactive Systems Conference, DIS ’19, San Diego, CA, USA, 23–28 June 2019; pp. 921–934. [Google Scholar] [CrossRef]
- Kaspersen, M.H.; Hines, S.; Moore, M.; Rasmussen, M.K.; Dias, M.A. Lifting Kirigami Actuators Up Where They Belong: Possibilities for SCI. In Proceedings of the 2019 on Designing Interactive Systems Conference, DIS ’19, San Diego, CA, USA, 23–28 June 2019; pp. 935–947. [Google Scholar] [CrossRef]
- Neville, R.M.; Scarpa, F.; Pirrera, A. Shape morphing Kirigami mechanical metamaterials. Sci. Rep. 2016, 6, 31067. [Google Scholar] [CrossRef] [PubMed]
- Qamar, I.P.S.; Groh, R.; Holman, D.; Roudaut, A. HCI Meets Material Science: A Literature Review of Morphing Materials for the Design of Shape-Changing Interfaces. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, CHI ’18, Montreal, QC, Canada, 21–26 April 2018; pp. 1–23. [Google Scholar] [CrossRef]
- Bell, F.; Ofer, N.; Frier, E.; McQuaid, E.; Choi, H.; Alistar, M. Biomaterial Playground: Engaging with Bio-Based Materiality. In Proceedings of the Extended Abstracts of the 2022 CHI Conference on Human Factors in Computing Systems, CHI EA ’22, New Orleans, LA, USA, 29 April–5 May 2022. [Google Scholar] [CrossRef]
- Zheng, J.; Bryan-Kinns, N.; McPherson, A.P. Material Matters: Exploring Materiality in Digital Musical Instruments Design. In Proceedings of the Designing Interactive Systems Conference, DIS ’22, Virtual, 13–17 June 2022; pp. 976–986. [Google Scholar] [CrossRef]
- Roudaut, A.; Karnik, A.; Löchtefeld, M.; Subramanian, S. Morphees: Toward high “shape resolution” in self-actuated flexible mobile devices. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Paris, France, 27 April–2 May 2013; pp. 593–602. [Google Scholar]
- Rasmussen, M.K.; Pedersen, E.W.; Petersen, M.G.; Hornbæk, K. Shape-Changing Interfaces: A Review of the Design Space and Open Research Questions. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, CHI ’12, Austin, TX, USA, 5–10 May 2012; pp. 735–744. [Google Scholar] [CrossRef]
- Kinoshita, Y.; Go, K.; Kozono, R.; Kaneko, K. Origami Tessellation Display: Interaction Techniques Using Origami-Based Deformable Surfaces. In Proceedings of the CHI ’14 Extended Abstracts on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; pp. 1837–1842. [Google Scholar] [CrossRef]
- Lipton, J.; Chin, L.; Miske, J.; Rus, D. Modular Volumetric Actuators Using Motorized Auxetics. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 7460–7466. [Google Scholar] [CrossRef]
- Ion, A.; Baudisch, P. Interactive Metamaterials. Interactions 2019, 27, 88–91. [Google Scholar] [CrossRef]
- Khalilbeigi, M.; Lissermann, R.; Mühlhäuser, M.; Steimle, J. Xpaaand: Interaction Techniques for Rollable Displays. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; pp. 2729–2732. [Google Scholar] [CrossRef]
- Khalilbeigi, M.; Lissermann, R.; Kleine, W.; Steimle, J. FoldMe: Interacting with Double-Sided Foldable Displays. In Proceedings of the Sixth International Conference on Tangible, Embedded and Embodied Interaction, Kinston, ON, Canada, 19–22 February 2012; pp. 33–40. [Google Scholar] [CrossRef]
- Ramakers, R.; Schöning, J.; Luyten, K. Paddle: Highly Deformable Mobile Devices with Physical Controls. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; pp. 2569–2578. [Google Scholar] [CrossRef]
- Lee, J.C.; Hudson, S.E.; Tse, E. Foldable Interactive Displays. In Proceedings of the 21st Annual ACM Symposium on User Interface Software and Technology, Monterey, CA, USA, 19–22 October 2008; pp. 287–290. [Google Scholar] [CrossRef]
- Zhou, Y.; Sueda, S.; Matusik, W.; Shamir, A. Boxelization: Folding 3D Objects into Boxes. ACM Trans. Graph. 2014, 33, 71. [Google Scholar] [CrossRef]
- Goguey, A.; Steer, C.; Lucero, A.; Nigay, L.; Sahoo, D.R.; Coutrix, C.; Roudaut, A.; Subramanian, S.; Tokuda, Y.; Neate, T.; et al. PickCells: A Physically Reconfigurable Cell-Composed Touchscreen. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glassglow, UK, 4–9 May 2019; pp. 1–14. [Google Scholar] [CrossRef]
- Roudaut, A.; Krusteva, D.; McCoy, M.; Karnik, A.; Ramani, K.; Subramanian, S. Cubimorph: Designing Modular Interactive Devices. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3339–3345. [Google Scholar] [CrossRef]
- Fröhlich, B.; Plate, J. The Cubic Mouse: A New Device for Three-Dimensional Input. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, The Hague, The Netherlands, 1–6 April 2000; pp. 526–531. [Google Scholar] [CrossRef]
- Suh, J.; Kim, W.; Bianchi, A. Button+: Supporting User and Context Aware Interaction through Shape-Changing Interfaces. In Proceedings of the Eleventh International Conference on Tangible, Embedded, and Embodied Interaction, Yokohama, Japan, 20–23 March 2017; pp. 261–268. [Google Scholar] [CrossRef]
- Kim, H.; Coutrix, C.; Roudaut, A. KnobSlider: Design of a Shape-Changing UI for Parameter Control. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–13. [Google Scholar] [CrossRef]
- Geiger, C.; Rattay, O. TubeMouse—A Two-Handed Input Device for Flexible Objects. In Proceedings of the 2008 IEEE Symposium on 3D User Interfaces, Reno, NV, USA, 8–9 March 2008; pp. 27–34. [Google Scholar] [CrossRef]
- Roudaut, A.; Martinez, D.; Chohan, A.; Otrocol, V.S.; Cobbe-Warburton, R.; Steele, M.; Patrichi, I.M. Rubikon: A Highly Reconfigurable Device for Advanced Interaction. In Proceedings of the CHI ’14 Extended Abstracts on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; pp. 1327–1332. [Google Scholar] [CrossRef]
- McClelland, J.C.; Teather, R.J.; Girouard, A. Haptobend: Shape-Changing Passive Haptic Feedback in Virtual Reality. In Proceedings of the 5th Symposium on Spatial User Interaction, Brighton, UK, 16–17 October 2017; pp. 82–90. [Google Scholar] [CrossRef]
- Feick, M.; Kleer, N.; Zenner, A.; Tang, A.; Krüger, A. Visuo-Haptic Illusions for Linear Translation and Stretching Using Physical Proxies in Virtual Reality. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021. [Google Scholar] [CrossRef]
- Pellegrino, S. Deployable Structures in Engineering. In Deployable Structures; Springer: Vienna, Austria, 2001; pp. 1–35. [Google Scholar] [CrossRef]
- Hanaor, A.; Levy, R. Evaluation of Deployable Structures for Space Enclosures. Int. J. Space Struct. 2001, 16, 211–229. [Google Scholar] [CrossRef]
- You, Z.; Pellegrino, S. Foldable bar structures. Int. J. Solids Struct. 1997, 34, 1825–1847. [Google Scholar] [CrossRef]
- Hoberman, C. Radial Expansion/Retraction Truss Structures. U.S. Patent 5,024,031, 18 June 1991. [Google Scholar]
- Austin, J.; Baker, H.; Ball, T.; Devine, J.; Finney, J.; De Halleux, P.; Hodges, S.; Moskal, M.; Stockdale, G. The BBC Micro:Bit: From the U.K. to the World. Commun. ACM 2020, 63, 62–69. [Google Scholar] [CrossRef]
- Saidi, H.; Serrano, M.; Irani, P.; Dubois, E. TDome: A touch-enabled 6DOF interactive device for multi-display environments. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 5892–5904. [Google Scholar]
- Schmeier, B.; Kopetz, J.P.; Kordts, B.; Jochems, N. Manipulating Virtual Objects in Augmented Reality Using a New Ball-Shaped Input Device. In Proceedings of the 12th Augmented Human International Conference, Geneva, Switzerland, 27–28 May 2021. [Google Scholar] [CrossRef]
- Varesano, F.; Vernero, F. Introducing PALLA, a Novel Input Device for Leisure Activities: A Case Study on a Tangible Video Game for Seniors. In Proceedings of the 4th International Conference on Fun and Games, Toulouse, France, 4–6 September 2012; pp. 35–44. [Google Scholar] [CrossRef]
- Casiez, G.; Roussel, N.; Vogel, D. 1€ filter: A simple speed-based low-pass filter for noisy input in interactive systems. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May 2012; pp. 2527–2530. [Google Scholar]
- Rekimoto, J. Tilting operations for small screen interfaces. In Proceedings of the 9th Annual ACM Symposium on User Interface Software and Technology, Seattle, WA, USA, 6–8 November 1996; pp. 167–168. [Google Scholar] [CrossRef]
- Kratz, S.; Rohs, M. Extending the virtual trackball metaphor to rear touch input. In Proceedings of the 2010 IEEE Symposium on 3D User Interfaces (3DUI), Waltham, MA, USA, 20–21 March 2010; pp. 111–114. [Google Scholar] [CrossRef]
- Bowman, D.A.; Kruijff, E.; LaViola, J.J.; Poupyrev, I. An introduction to 3-D user interface design. Presence 2001, 10, 96–108. [Google Scholar] [CrossRef]
- Buxton, W. A three-state model of graphical input. In Proceedings of the INTERACT ’90: IFIP TC13 Third Interational Conference on Human-Computer Interaction, Cambridge, UK, 27–31 August 1990; pp. 449–456. [Google Scholar]
- Weichel, C.; Alexander, J.; Karnik, A.; Gellersen, H. SPATA: Spatio-Tangible Tools for Fabrication-Aware Design. In Proceedings of the Ninth International Conference on Tangible, Embedded, and Embodied Interaction, Stanford, CA, USA, 15–19 January 2015; pp. 189–196. [Google Scholar] [CrossRef]
- Zoran, A.; Paradiso, J.A. FreeD: A Freehand Digital Sculpting Tool. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Paris, France, 27 April–2 May 2013; pp. 2613–2616. [Google Scholar] [CrossRef]
- De Temmerman, N. Design and Analysis of Deployable Bar Structures for Mobile Architectural Applications. Ph.D. Thesis, Vrije Universiteit Brussel, Brussel, Belgium, 2007. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Razevicius, G.; Roudaut, A.; Karnik, A. HoberUI: An Exploration of Kinematic Structures as Interactive Input Devices. Multimodal Technol. Interact. 2024, 8, 13. https://doi.org/10.3390/mti8020013
Razevicius G, Roudaut A, Karnik A. HoberUI: An Exploration of Kinematic Structures as Interactive Input Devices. Multimodal Technologies and Interaction. 2024; 8(2):13. https://doi.org/10.3390/mti8020013
Chicago/Turabian StyleRazevicius, Gvidas, Anne Roudaut, and Abhijit Karnik. 2024. "HoberUI: An Exploration of Kinematic Structures as Interactive Input Devices" Multimodal Technologies and Interaction 8, no. 2: 13. https://doi.org/10.3390/mti8020013
APA StyleRazevicius, G., Roudaut, A., & Karnik, A. (2024). HoberUI: An Exploration of Kinematic Structures as Interactive Input Devices. Multimodal Technologies and Interaction, 8(2), 13. https://doi.org/10.3390/mti8020013