



Heterogeneous Traffic Condition Dataset Collection for Creating Road Capacity Value

Abstract
:1. Introduction
2. Literature Review
2.1. Degree of Saturation
2.1.1. Traffic Flow
2.1.2. Road Capacity
2.1.3. Degree of Saturation Based on Road Infrastructure
2.2. Video Analysis with Object Detection
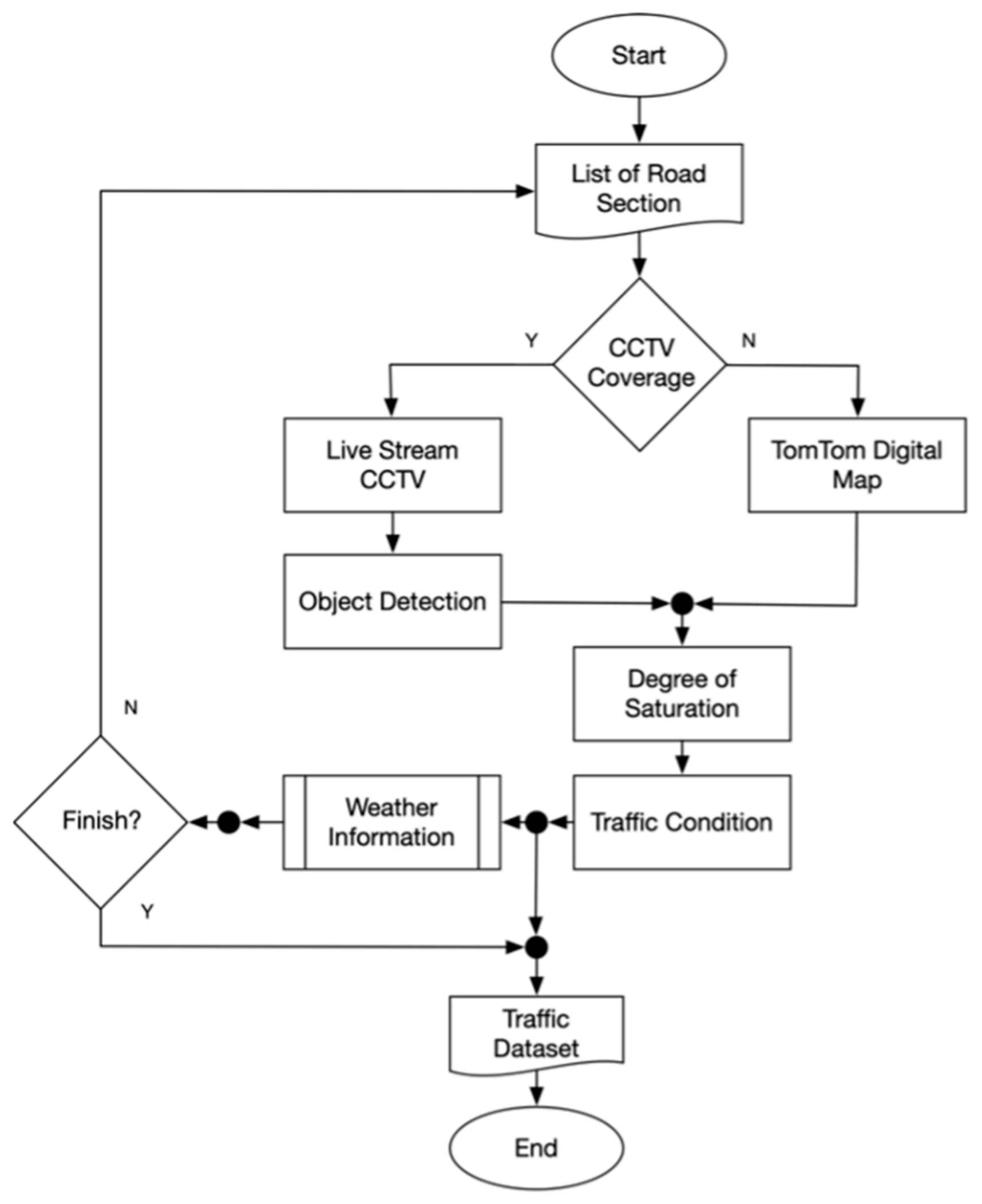
3. Proposed Framework
3.1. Dataset Collection Using Object Detection in CCTV
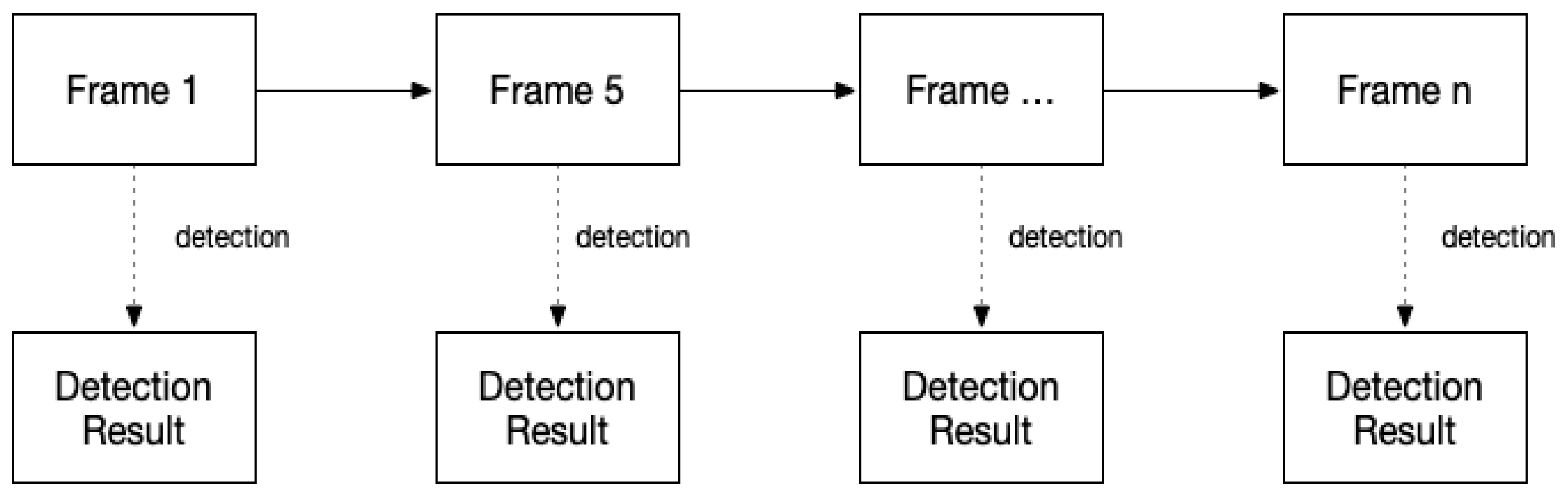
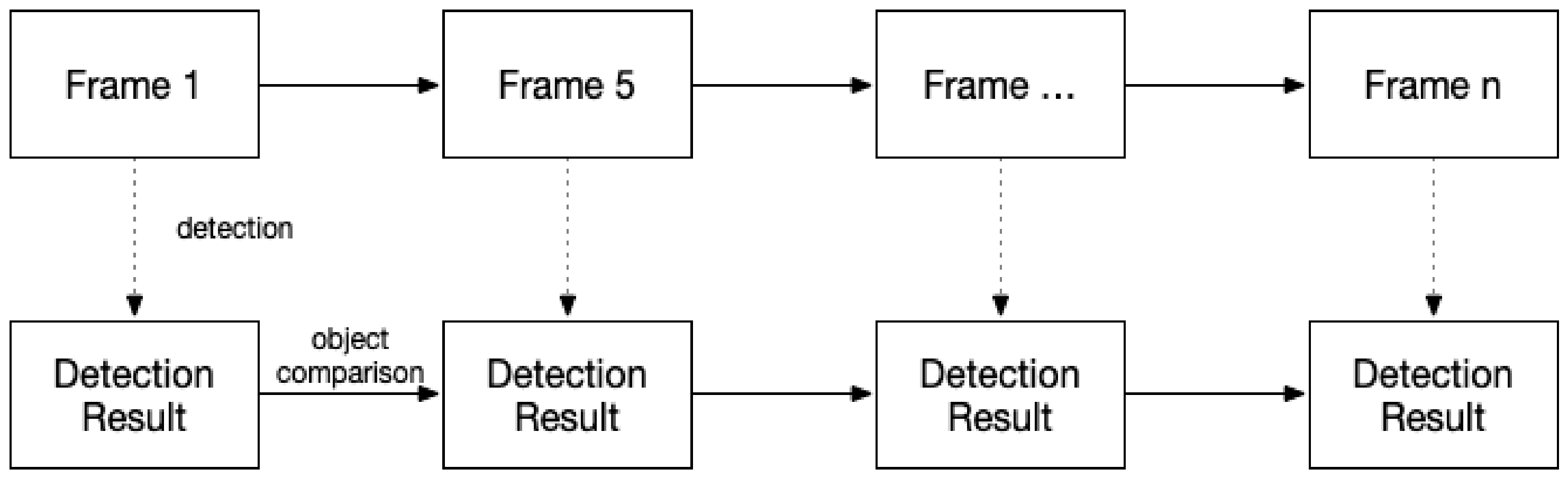
3.1.1. Vehicle Counting
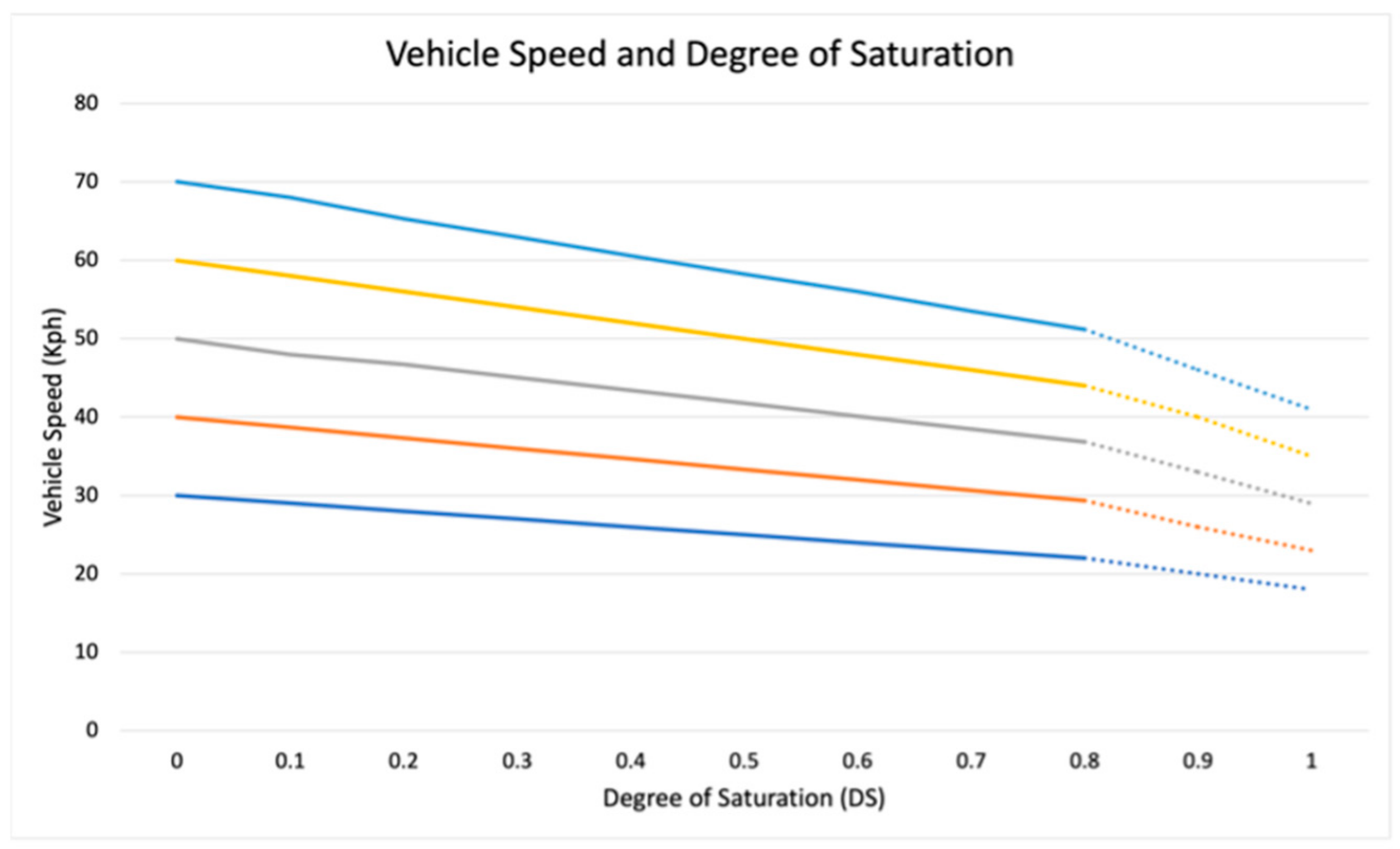
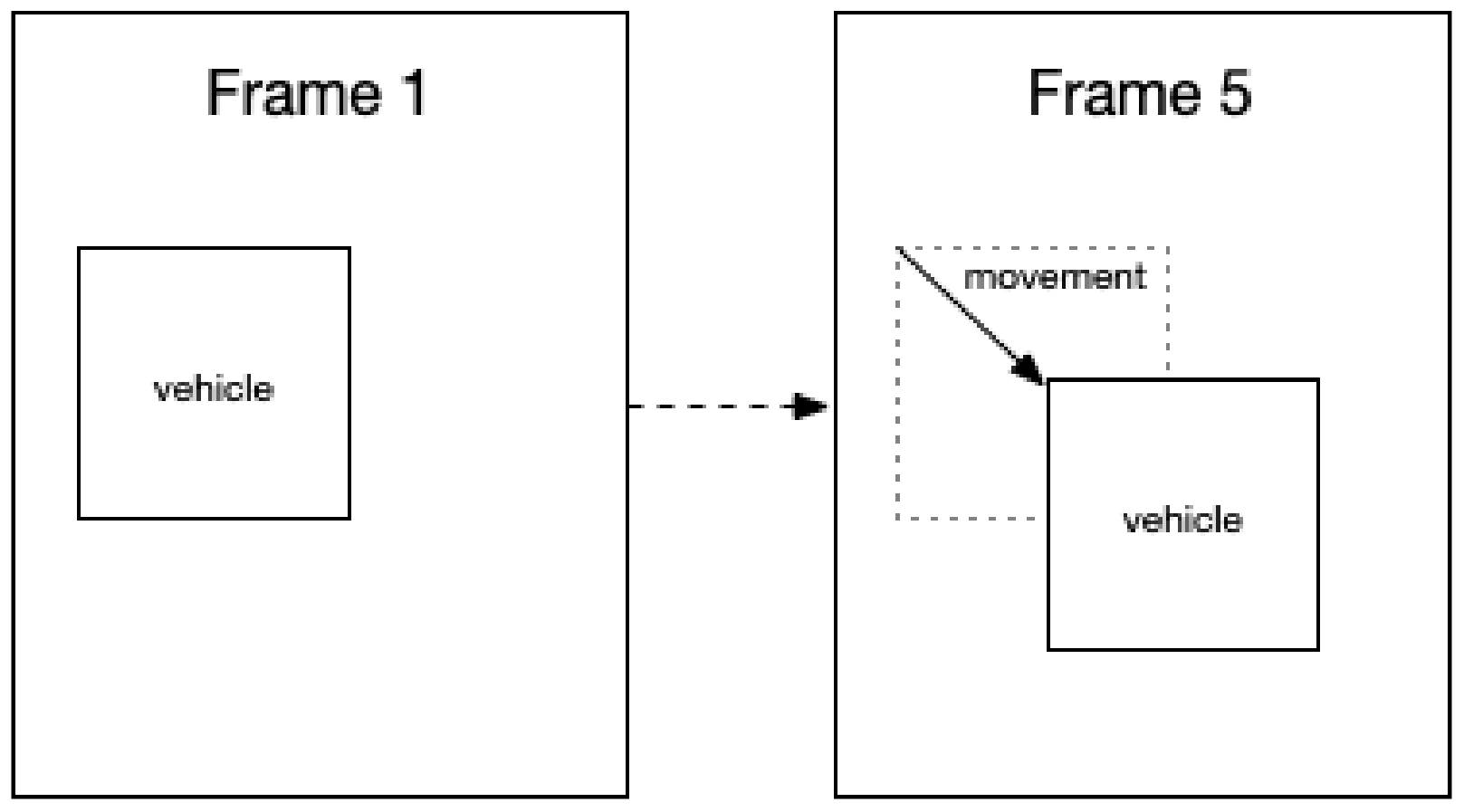
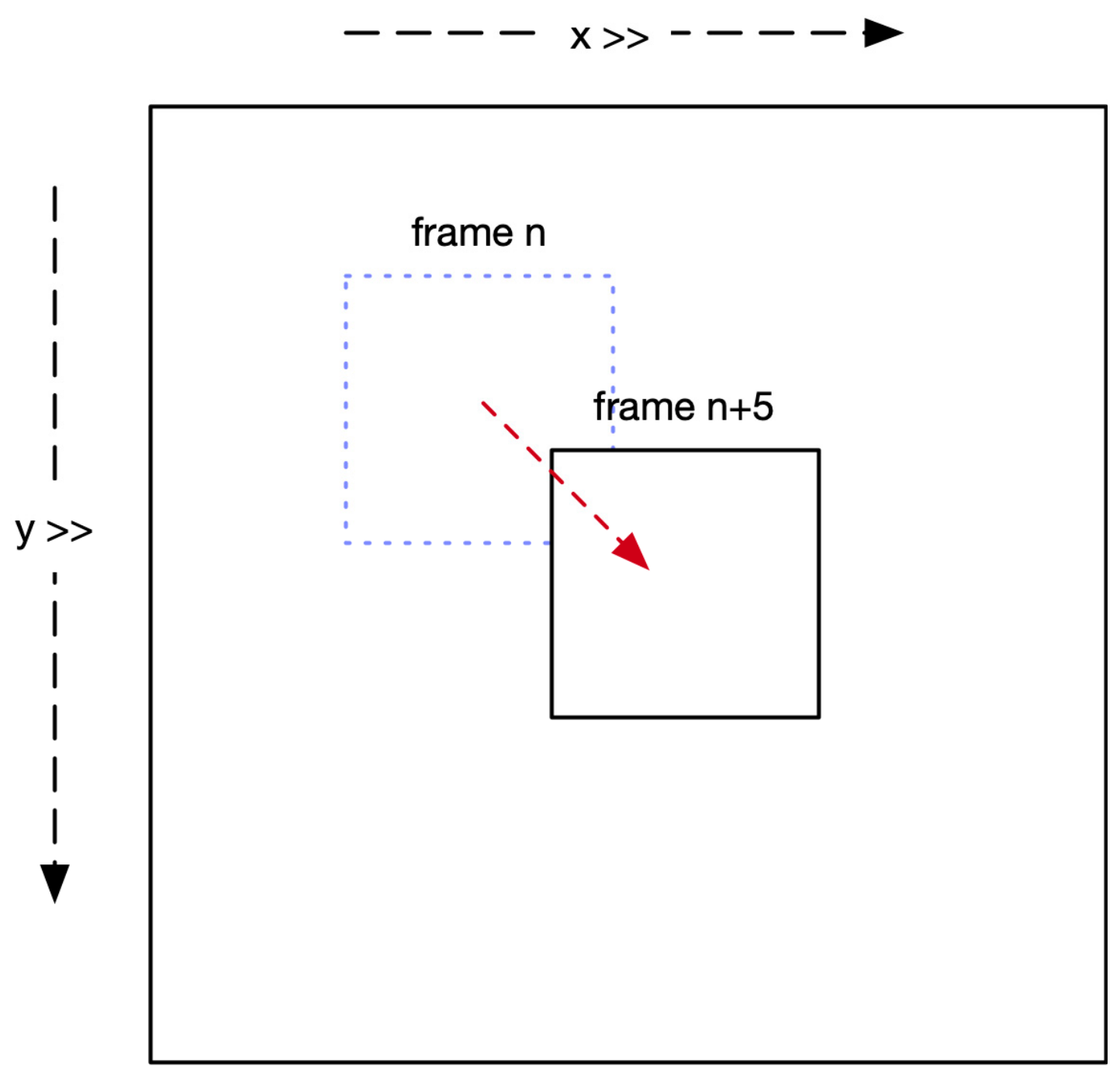
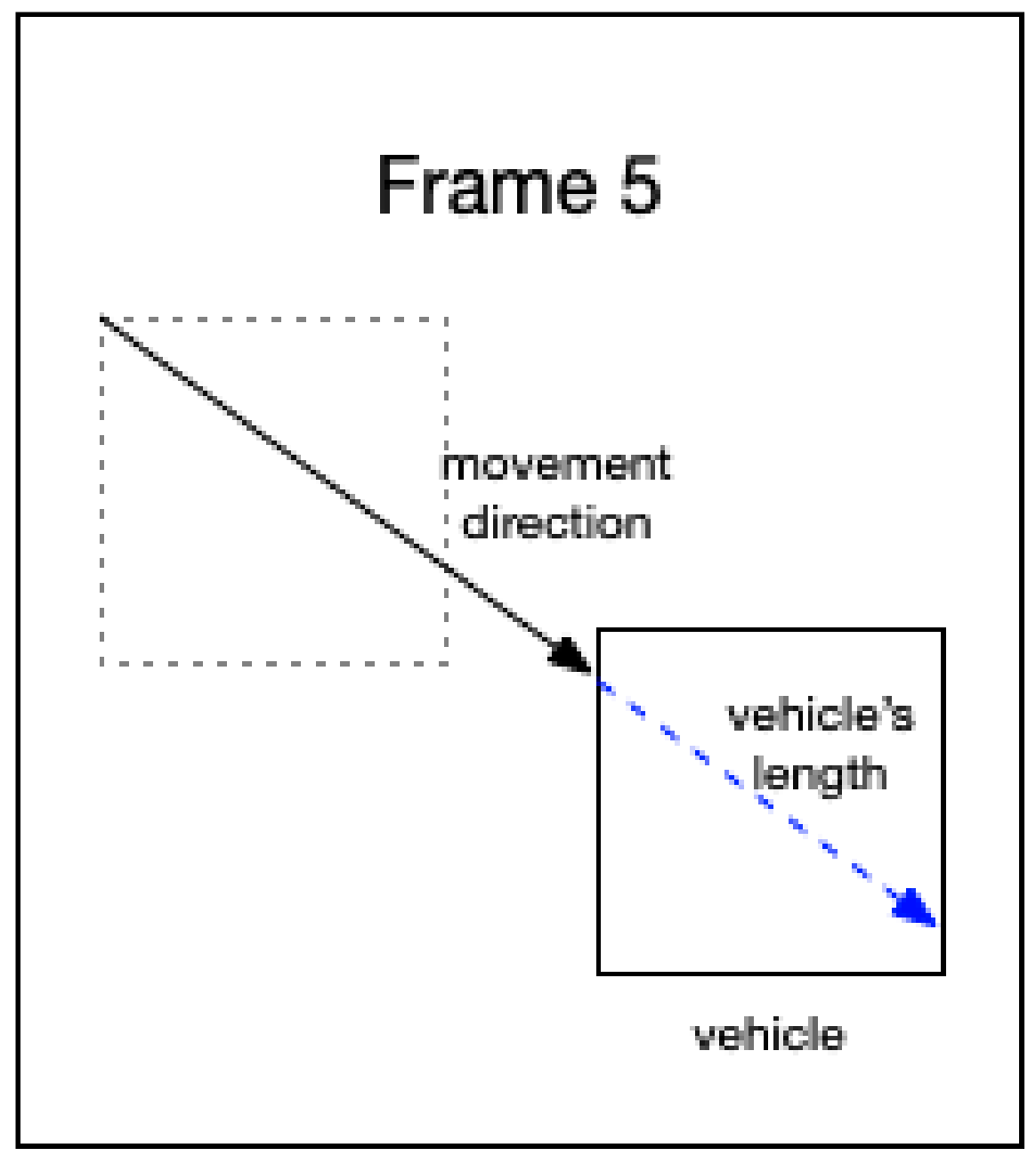
3.1.2. The Calculation of Vehicle Speed
3.2. Dataset Collection Using TomTom Digital Maps
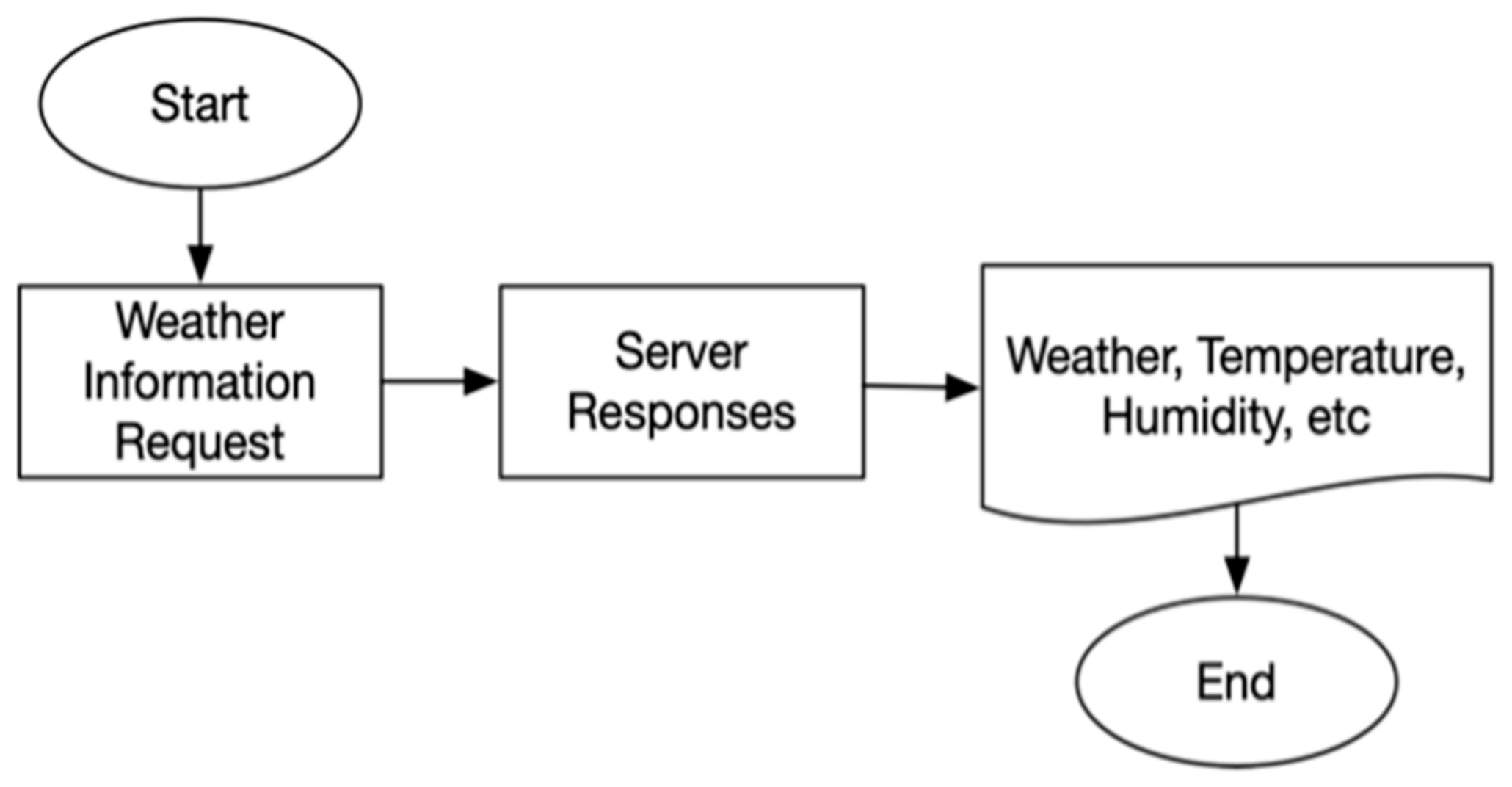
3.3. Weather Information
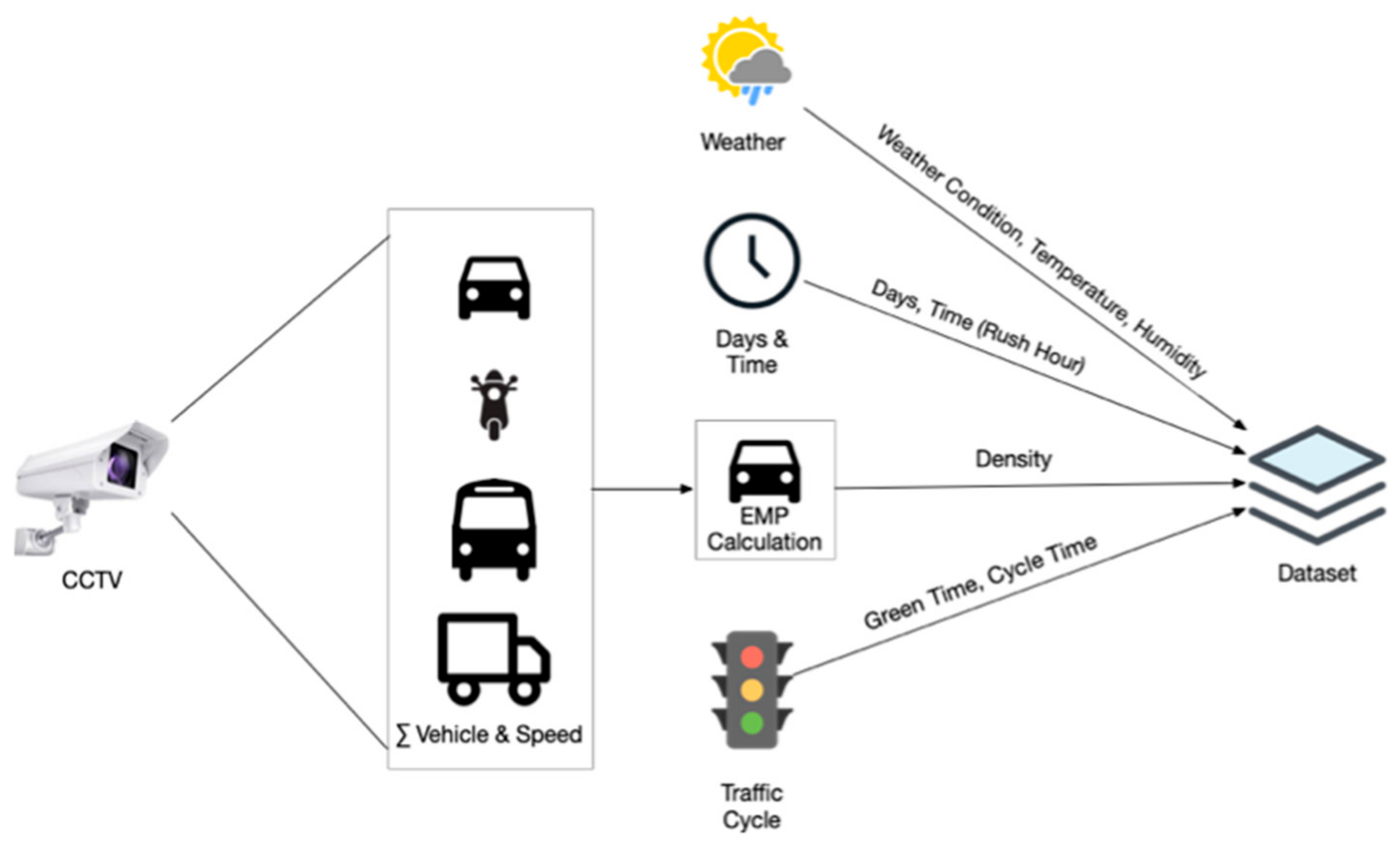
3.4. The Compilation of Traffic Dataset
4. Experimental Results
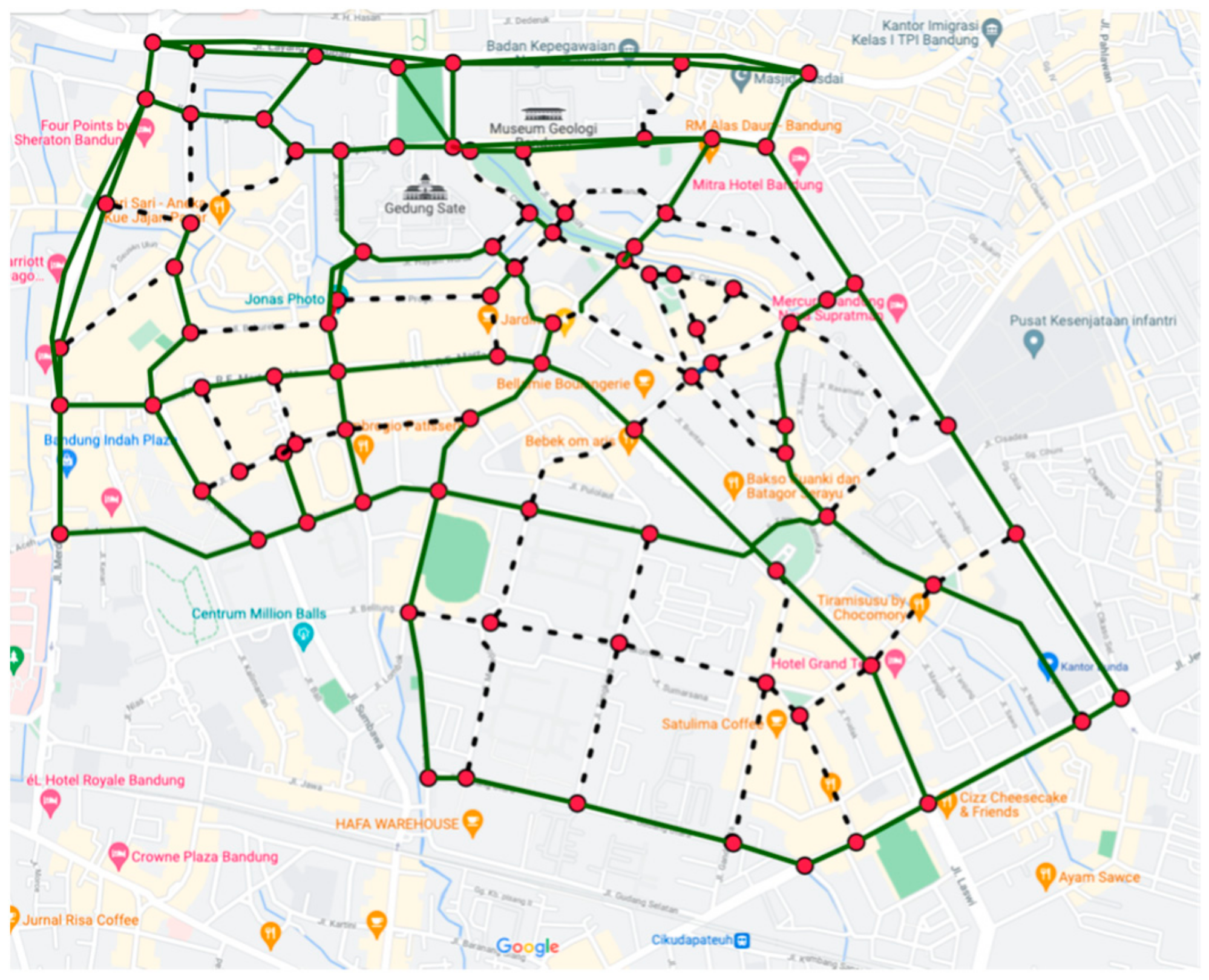
4.1. Traffic Condition Dataset Collection
4.1.1. Validation of Traffic Condition Based on CCTV
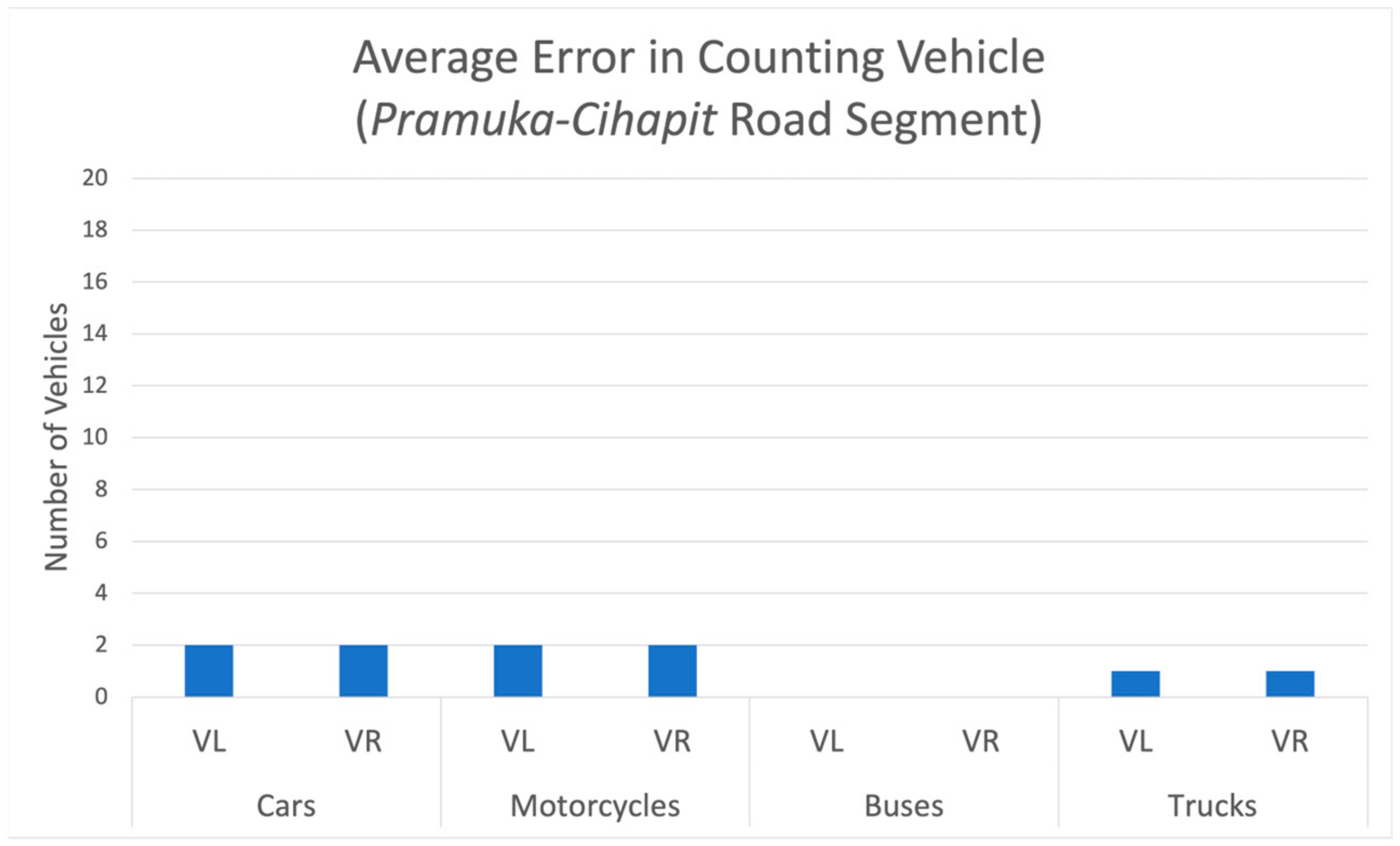
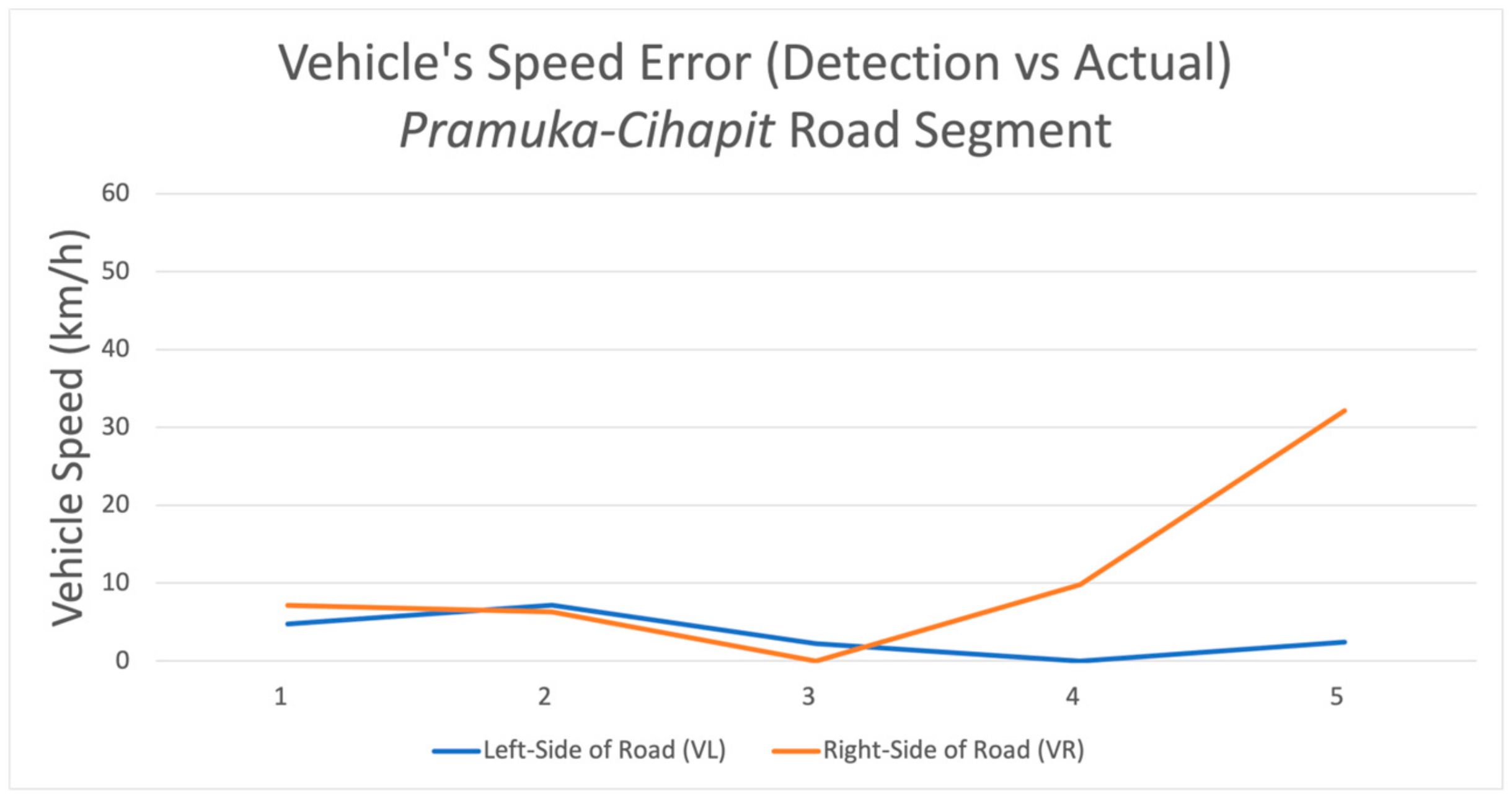
Pramuka–Cihapit Road Segment
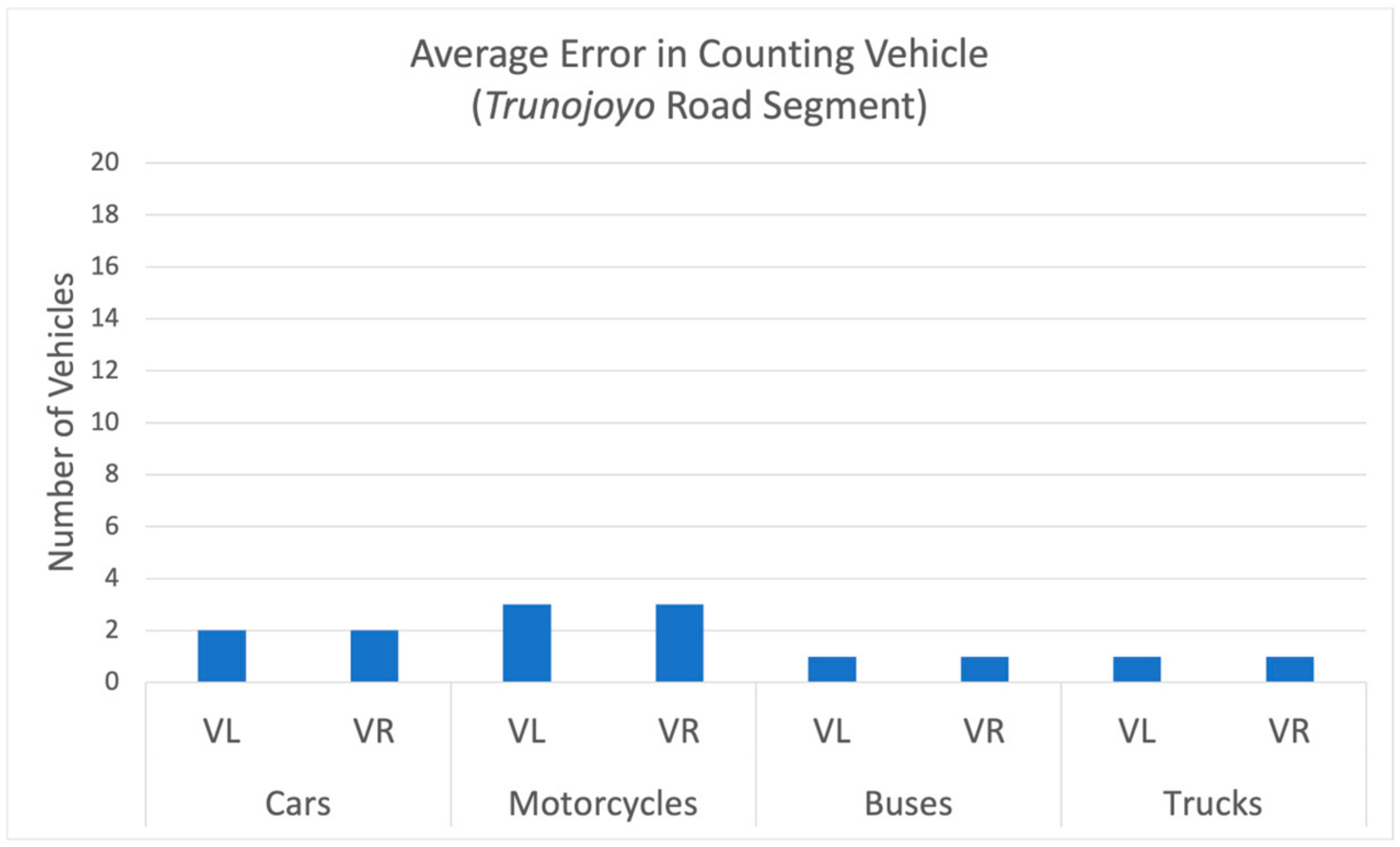
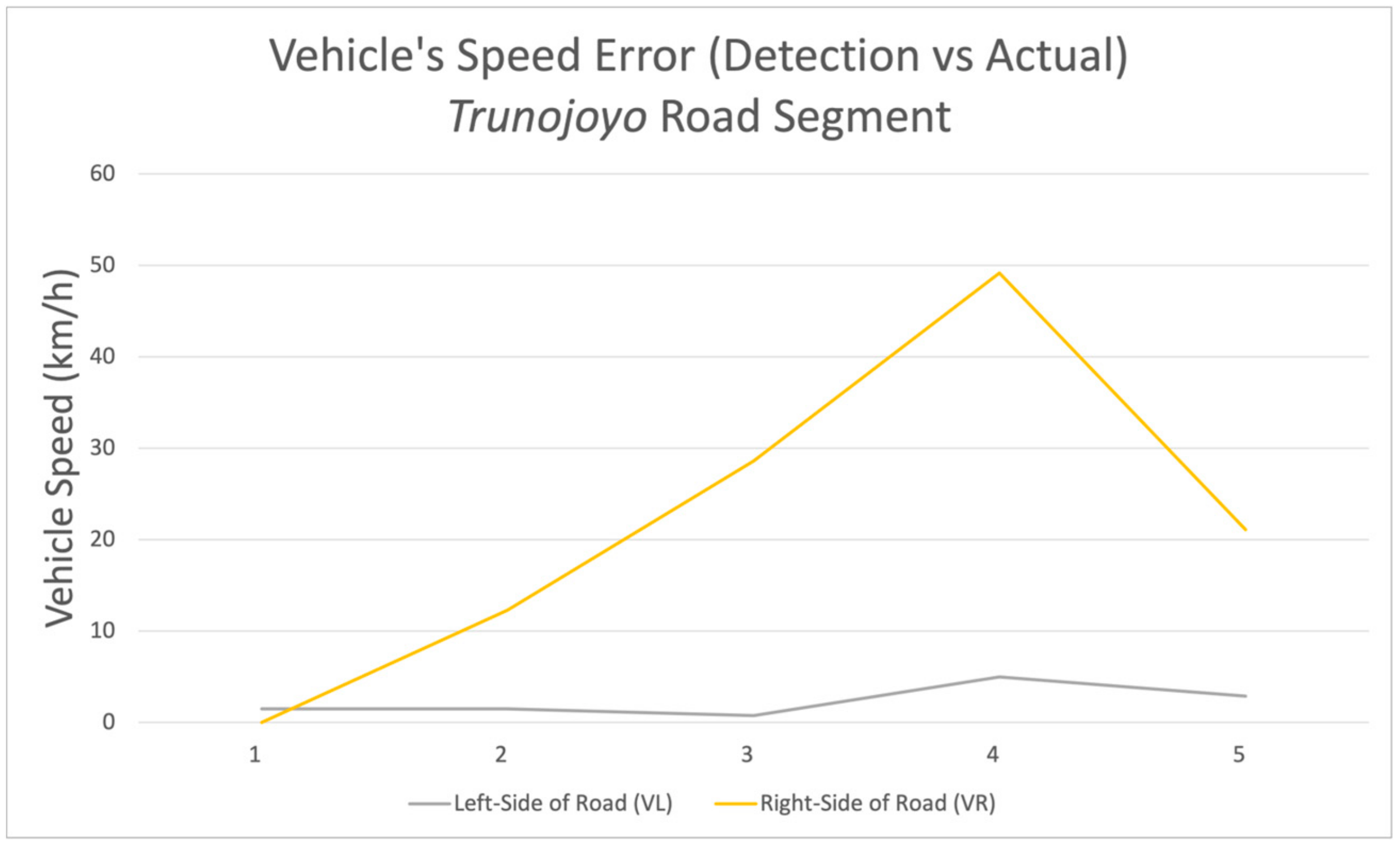
Trunojoyo Road Segment
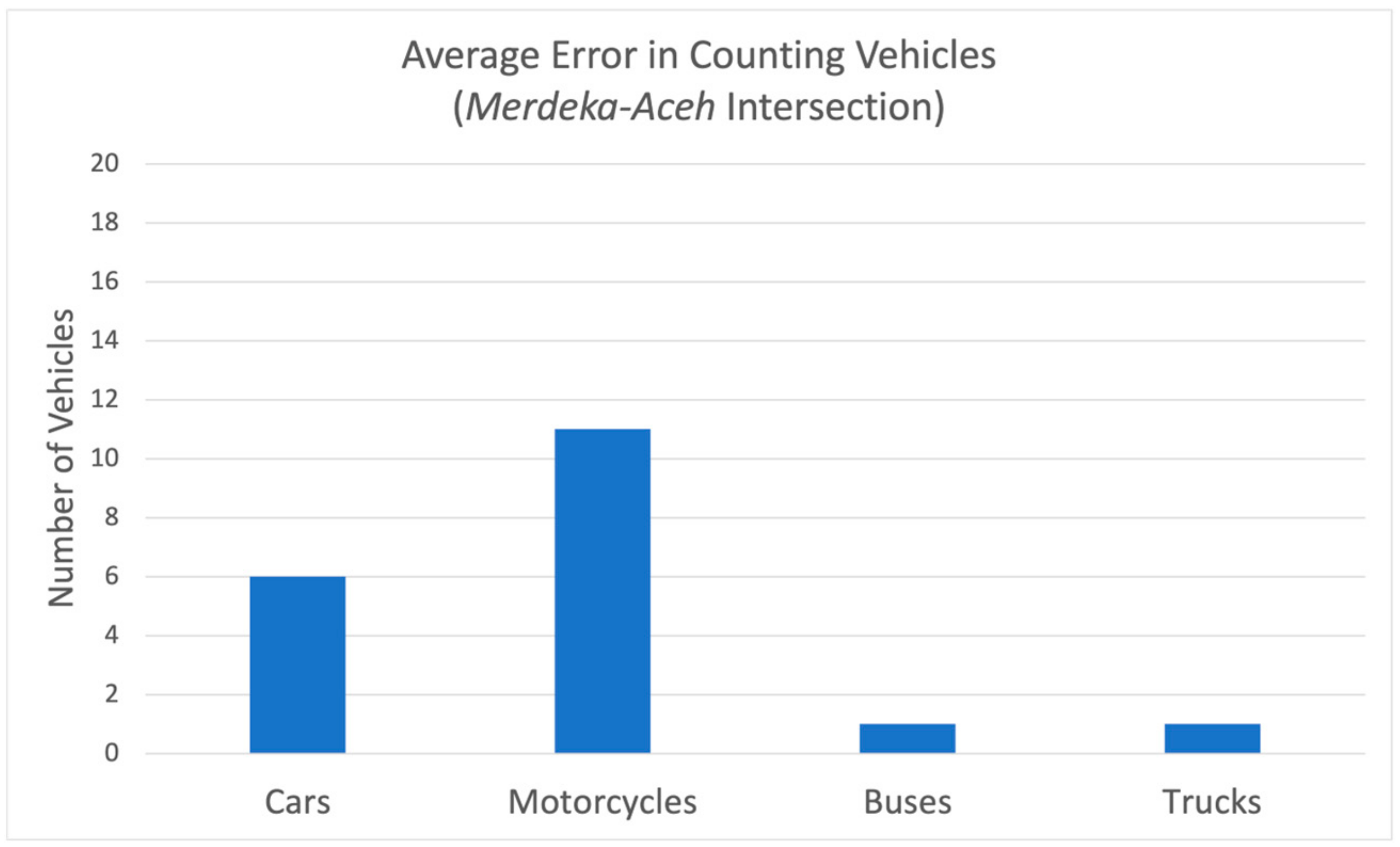
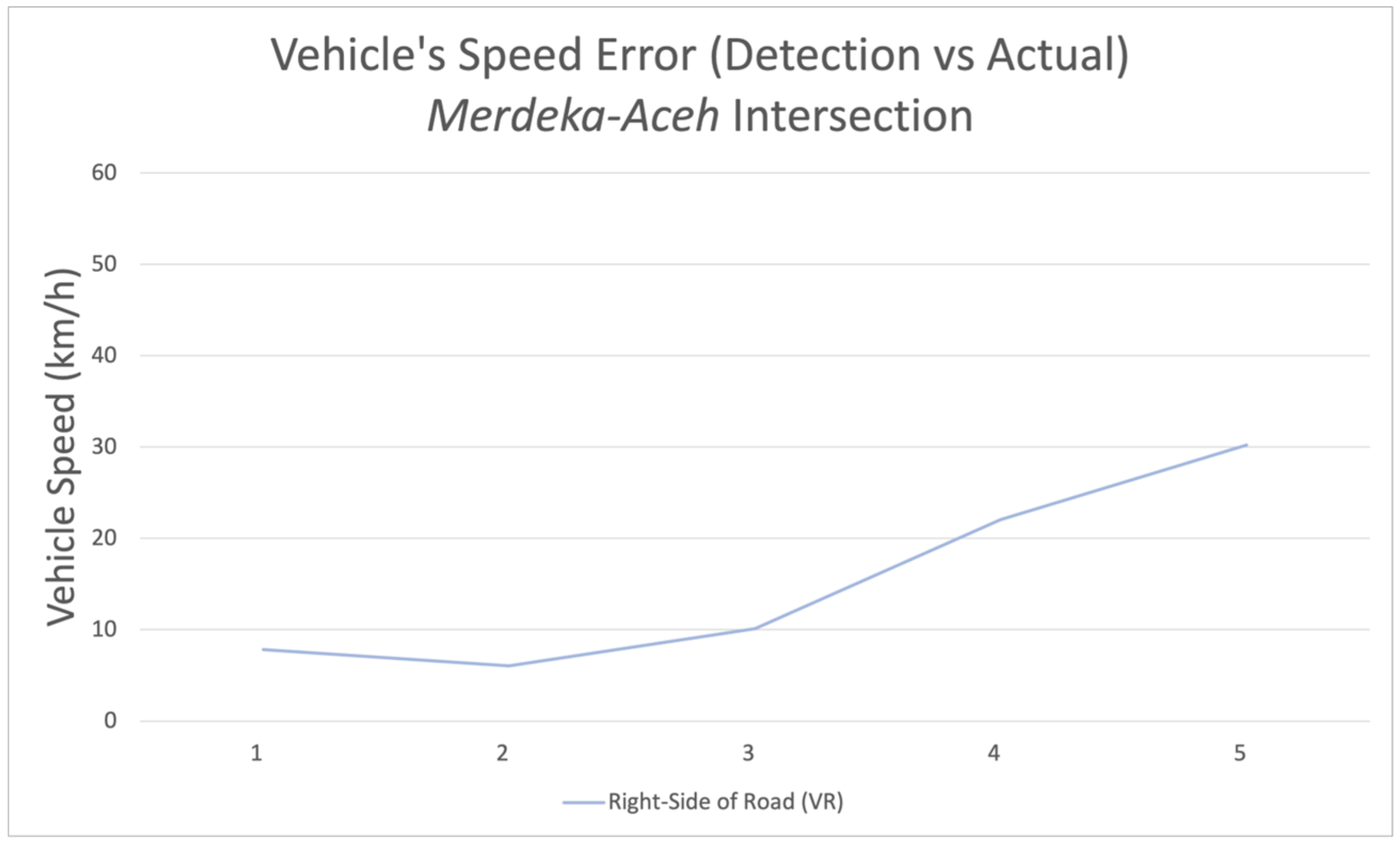
Merdeka-Aceh Intersection
4.2. The Measurement of Traffic Condition Category
4.2.1. Traffic Conditions Based on CCTV
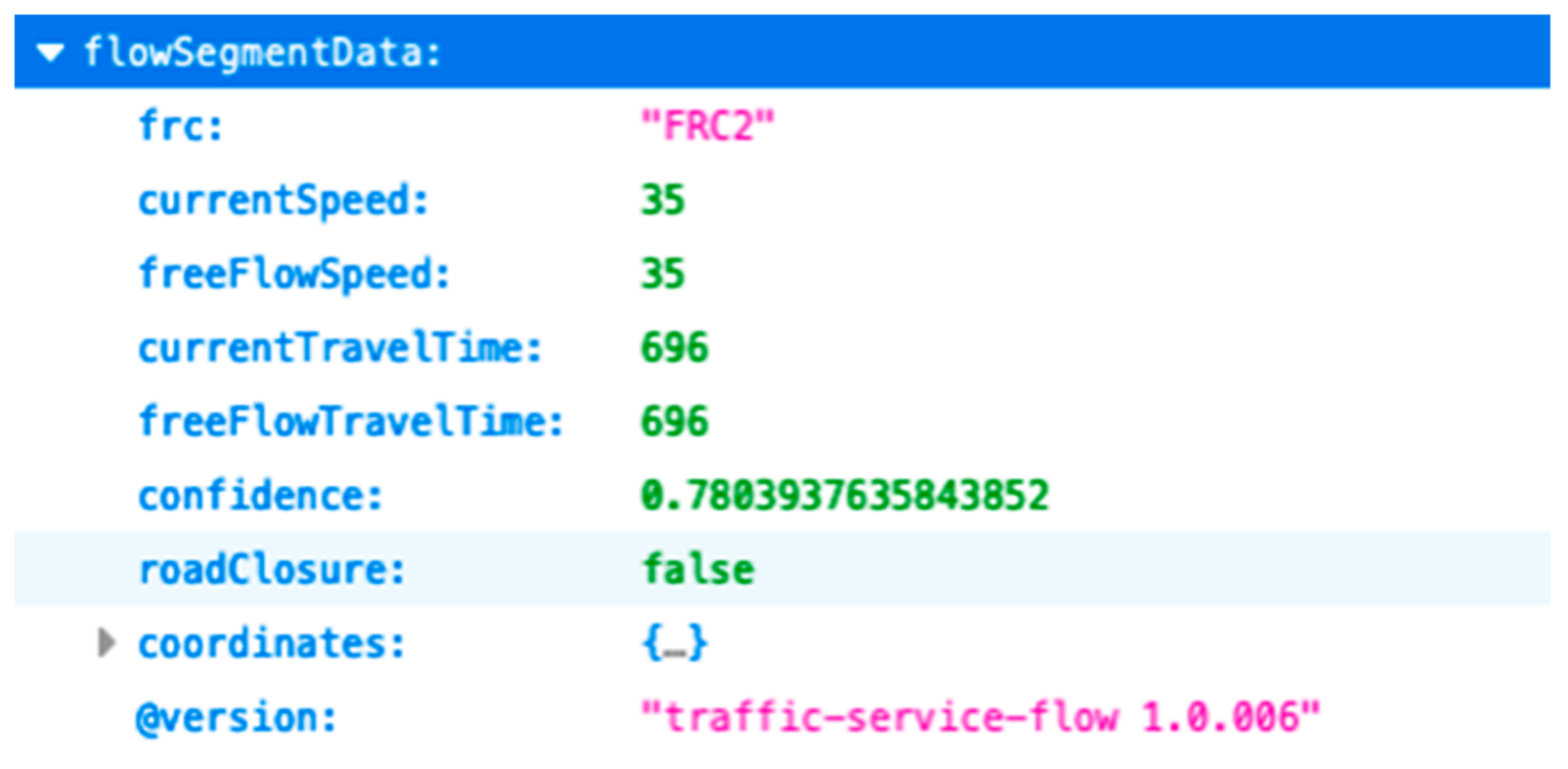
4.2.2. Traffic Condition Based on TomTom Digital Maps
4.3. The Collection of Weather Information
4.4. Normalization of Traffic Condition Dataset
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- BPS. Perkembangan Jumlah Kendaraan Bermotor Menurut Jenis, 1949–2016; BPS: Jakarta, Indonesia, 2018. [Google Scholar]
- Moyo, T.; Mbatha, S.; Aderibigbe, O.-O.; Gumbo, T.; Musonda, I. Assessing Spatial Variations of Traffic Congestion Using Traffic Index Data in a Developing City: Lessons from Johannesburg, South Africa. Sustainability 2022, 14, 8809. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollar, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 318–327. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.; Gao, T.; Zhu, Z.; Zhao, Y. Real-Time Face Mask Detection Method Based on Yolov3. Electronics 2021, 10, 837. [Google Scholar] [CrossRef]
- Chun, L.Z.; Dian, L.; Zhi, J.Y.; Jing, W.; Zhang, C. YOLOv3: Face Detection in Complex Environments. Int. J. Comput. Intell. Syst. 2020, 13, 1153–1160. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Z. Text Detection Algorithm Based on Improved YOLOv3. In Proceedings of the 2019 IEEE 9th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 12–14 July 2019; pp. 147–150. [Google Scholar]
- Xiao, L.; Zhou, P.; Xu, K.; Zhao, X. Multi-Directional Scene Text Detection Based on Improved Yolov3. Sensors 2021, 21, 4870. [Google Scholar] [CrossRef]
- Marques, R.; Ribeiro, T.; Lopes, G.; Ribeiro, A. YOLOv3: Traffic Signs & Lights Detection and Recognition for Autonomous Driving. In Proceedings of the 14th International Conference on Agents and Artificial Intelligence, Vienna, Austria, 3–5 February 2022; Volume 3, pp. 818–826. [Google Scholar] [CrossRef]
- Xiang, N.; Cao, Z.; Wang, Y.; Jia, Q. A Real-Time Vehicle Traffic Light Detection Algorithm Based on Modified YOLOv3. In Proceedings of the 2021 IEEE 4th International Conference on Electronics Technology (ICET), Chengdu, China, 7–10 May 2021; pp. 844–850. [Google Scholar]
- Salam, H.; Jaleel, H.; Hameedi, S. You Only Look Once (YOLOv3): Object Detection and Recognition for Indoor Environment. Multicult. Educ. 2021, 7, 174. [Google Scholar] [CrossRef]
- Prabhu, S.; Khopkar, V.; Nivendkar, S.; Satpute, O.; Jyotinagar, V. Object Detection and Classification Using GPU Acceleration. Adv. Intell. Syst. Comput. 2020, 1108, 161–170. [Google Scholar] [CrossRef]
- Warsi, A.; Abdullah, M.; Husen, M.N.; Yahya, M.; Khan, S.; Jawaid, N. Gun Detection System Using Yolov3. In Proceedings of the 2019 IEEE 6th International Conference on Smart Instrumentation, Measurement and Application (ICSIMA), Kuala Lumpur, Malaysia, 27–29 August 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Nasution, S.M.; Husni, E.; Kuspriyanto, K.; Yusuf, R.; Yahya, B.N. Contextual Route Recommendation System in Heterogeneous Traffic Flow. Sustainability 2021, 13, 13191. [Google Scholar] [CrossRef]
- Susilo, B.H.; Imanuel, I. Traffic Congestion Analysis Using Travel Time Ratio and Degree of Saturation on Road Sections in Palembang, Bandung, Yogyakarta, and Surakarta. MATEC Web Conf. 2018, 181, 06010. [Google Scholar] [CrossRef] [Green Version]
- PT. Bina Karya (Persero). Manual Kapasitas Jalan Indonesia; PT. Bina Karya (Persero): Jakarta, Indonesia, 1997. [Google Scholar]
- Juniarta, I.; Negara, I.; Wikrama, A. Penentuan Nilai Ekivalensi Mobil Penumpang Pada Ruas Jalan Perkotaan. J. Ilm. Elektron. Infrastruktur Tek. Sipil 2012, 1, 1–7. [Google Scholar]
- Yulipriyono, E.E.; Purwanto, D. Perubahan Nilai Ekivalensi Mobil Penumpang Akibat Perubahan Karakteristik Operasional Kendaraan Di Jalan Kota Semarang. Media Komun. Tek. Sipil 2017, 23, 69. [Google Scholar] [CrossRef] [Green Version]
- Sugeng, R. Rekayasa Dan Manajemen Lalu Lintas: Teori Dan Aplikasi, 1st ed.; LeutikaPrio: Yogyakarta, Indonesia, 2014. [Google Scholar]
- Munawar, A. Manajemen Lalu Lintas Perkotaan; Beta Offset: Yogyakarta, Indonesia, 2004. [Google Scholar]
- Rahayu, G.; Rosyidi, S.A.P.; Munawar, A. Analisis Arus Jenuh Dan Panjang Antrian Pada Simpang Bersinyal: Studi Kasus Di Jalan Dr. Sutomo-Suryopranoto, Yogyakarta. J. Ilm. Semesta Tek. 2009, 12, 99–108. [Google Scholar]
- Bester, C.J.; Meyers, W.L. Saturation Flow Rates. In Proceedings of the SATC 2007—26th Annual Southern African Transport “The Challenges of Implementing Policy?”, Pretoria, South Africa, 9–12 July 2007; pp. 560–568. [Google Scholar] [CrossRef]
- Aoyama, E.; Yoshioka, K.; Shimokawa, S.; Morita, H. Estimating Saturation Flow Rates at Signalized Intersections in Japan. Asian Transp. Stud. 2020, 6, 100015. [Google Scholar] [CrossRef]
- Nasution, S.M.; Husni, E.; Kuspriyanto. The Effect of Heterogeneous Traffic Flow on The Transportation System. In Proceedings of the International Conference on Electrical Engineering and Computer Science, Bali, Indonesia, 13 November 2018; Volume 1. [Google Scholar]
- Irawan, M.Z.; Sumi, T.; Munawar, A. Implementation of the 1997 Indonesian Highway Capacity Manual (MKJI) Volume Delay Function. Proc. East. Asia Soc. Transp. Stud. 2009, 7, 1–11. [Google Scholar]
- Treiber, M.; Kesting, A. Automatic and Efficient Driving Strategies While Approaching a Traffic Light. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. Lect. Notes Comput. Sci. 2014, 8693, 740–755. [Google Scholar] [CrossRef] [Green Version]
- Szarvas, M.; Yoshizawa, A.; Yamamoto, M.; Ogata, J. Pedestrian Detection with Convolutional Neural Networks. In Proceedings of the IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005; pp. 224–229. [Google Scholar] [CrossRef]
- De Smedt, F.; Goedemé, T. Open Framework for Combined Pedestrian Detection. In Proceedings of the VISAPP 2015—10th IInternational Conference on Computer Vision Theory and Applications, Berlin, Germany, 11–14 March 2015; Volume 2, pp. 551–558. [Google Scholar] [CrossRef] [Green Version]
- Hasan, I.; Liao, S.; Li, J.; Akram, S.U.; Shao, L. Generalizable Pedestrian Detection: The Elephant in the Room. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 11323–11332. [Google Scholar] [CrossRef]
- Owayjan, M.; Dergham, A.; Haber, G.; Fakih, N.; Hamoush, A.; Abdo, E. Face Recognition Security System. Lect. Notes Electr. Eng. 2015, 312, 343–348. [Google Scholar] [CrossRef]
- Dirgantara, F.M.; Wicaksa, D.P. Design of Face Recognition Security System on Public Spaces. J. Electr. Electron. Inf. Commun. Technol. 2022, 4, 6. [Google Scholar] [CrossRef]
- Li, X.; Wang, W.; Jiang, S.; Huang, Q.; Gao, W. Fast and Effective Text Detection. In Proceedings of the 2008 15th IEEE International Conference on Image Processing, San Diego, CA, USA, 12–15 October 2008; pp. 969–972. [Google Scholar] [CrossRef]
- Van Staden, J.; Brown, D. An Evaluation of YOLO-Based Algorithms for Hand Detection in the Kitchen. In Proceedings of the 2021 International Conference on Artificial Intelligence, Big Data, Computing and Data Communication Systems (icABCD), Durban, South Africa, 5–6 August 2021. [Google Scholar] [CrossRef]
- Chayeb, A.; Ouadah, N.; Tobal, Z.; Lakrouf, M.; Azouaoui, O. HOG Based Multi-Object Detection for Urban Navigation. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 2962–2967. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, H.; Wang, X.; Chen, S.; Wang, H.; Zheng, K.; Wang, H. Vehicle Object Detection Based on Improved RetinaNet. J. Phys. Conf. Ser. 2021, 1757, 012070. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—ECCV 2016, Proceedings of the 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 398–413. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Pang, L.; Liu, H.; Chen, Y.; Miao, J. Real-Time Concealed Object Detection from Passive Millimeter Wave Images Based on the YOLOV3 Algorithm. Sensors 2020, 20, 1678. [Google Scholar] [CrossRef] [Green Version]
- Nepal, U.; Eslamiat, H. Comparing YOLOv3, YOLOv4 and YOLOv5 for Autonomous Landing Spot Detection in Faulty UAVs. Sensors 2022, 22, 464. [Google Scholar] [CrossRef]
- Ge, Z.; Liou, S.; Wang, F.; Li, Z.; Sun, J. YOLOX: Exceeding YOLO Series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Asmara, R.A.; Syahputro, B.; Supriyanto, D.; Handayani, A.N. Prediction of Traffic Density Using Yolo Object Detection and Implemented in Raspberry Pi 3b + and Intel Ncs 2. In Proceedings of the 2020 4th International Conference on Vocational Education and Training (ICOVET), Malang, Indonesia, 19 September 2020; pp. 391–395. [Google Scholar] [CrossRef]
- Layek, M.A.; Uddin, A.F.M.S.; Hossain, M.D.; Thu, N.T.; Yu, S.; Yong, C.H.; Lee, G.-W.; Chung, T.; Huh, E.-N. Cloud-Based Smart Surveillance System Using Raspberry Pi and YOLO. Korea Softw. Congr. 2018, 12, 510–512. [Google Scholar]
- Wu, X.; Hong, D.; Ghamisi, P.; Li, W.; Tao, R. MsRi-CCF: Multi-Scale and Rotation-Insensitive Convolutional Channel Features for Geospatial Object Detection. Remote Sens. 2018, 10, 1990. [Google Scholar] [CrossRef] [Green Version]
- Gani, M.H.H.; Khalifa, O.O.; Gunawan, T.S.; Shamsan, E. Traffic Intensity Monitoring Using Multiple Object Detection with Traffic Surveillance Cameras. In Proceedings of the 2017 IEEE 4th International Conference on Smart Instrumentation, Measurement and Application (ICSIMA), Putrajaya, Malaysia, 28–30 November 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Bommes, M.; Fazekas, A.; Volkenhoff, T.; Oeser, M. Video Based Intelligent Transportation Systems—State of the Art and Future Development. Transp. Res. Procedia 2016, 14, 4495–4504. [Google Scholar] [CrossRef] [Green Version]
- Hoogendoorn, S.P.; Van Zuylen, H.J.; Schreuder, M.; Gorte, B.; Vosselman, G. Microscopic Traffic Data Collection by Remote Sensing. Transp. Res. Rec. 2003, 1855, 121–128. [Google Scholar] [CrossRef]
- Toledo, T.; Koutsopoulos, H.; Ben-Akiva, M.; Jha, M. Microscopic Traffic Simulation: Models and Application. Simul. Approaches Transp. Anal. 2000, 31, 99–130. [Google Scholar] [CrossRef]
- Chen, G.-W.; Yeh, T.-C.; Liu, C.-Y.; İk, T.-U. Microscopic Traffic Monitoring and Data Collection Cloud Platform Based on Aerial Video. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Republic of Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Castellano, G.; Castiello, C.; Mencar, C.; Vessio, G. Crowd Counting from Unmanned Aerial Vehicles with Fully-Convolutional Neural Networks. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Ciampi, L.; Amato, G.; Falchi, F.; Gennaro, C.; Rabitti, F. Counting Vehicles with Cameras. In Proceedings of the 26th Italian Symposium on Advanced Database Systems (SEBD 2018), Castellaneta Marina, Italy, 24–27 June 2018; Volume 2161. [Google Scholar]
- Liu, Z.; Zhang, W.; Gao, X.; Meng, H.; Tan, X.; Zhu, X.; Xue, Z.; Ye, X.; Zhang, H.; Wen, S.; et al. Robust Movement-Specific Vehicle Counting at Crowded Intersections. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 2617–2625. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y.; Zhang, Y.; Meng, H.; Li, S.; Dai, X. A Fast Vehicle Counting and Traffic Volume Estimation Method Based on Convolutional Neural Network. IEEE Access 2021, 9, 150522–150531. [Google Scholar] [CrossRef]
- Patel, F.; Solanki, J.; Rajguru, V.; Saxena, A. Recognition of Vehicle Number Plate Using Image Processing Technique. Adv. Emerg. Med. 2018, 7, 2–8. [Google Scholar] [CrossRef]
- Badr, A.; Abdelwahab, M.M.; Thabet, A.M.; Abdelsadek, A.M. Automatic Number Plate Recognition System. Ann. Univ. Craiova Math. Comput. Sci. Ser. 2011, 38, 62–71. [Google Scholar] [CrossRef]
- Dalaff, C.; Reulke, R.; Kroen, A.; Ruhé, M.; Schischmanow, A.; Schlotzhauzer, G.; Tuchscherer, W.; Kahl, T. A Traffic Object Detection System for Road Traffic Measurement and Management. In Proceedings of the Image and Vision Computing New Zealand 2003, Palmerston North, New Zealand, 26–28 November 2003; pp. 78–83. [Google Scholar]
- Nasution, S.M.; Husni, E.; Kuspriyanto; Yusuf, R.; Mulyawan, R. Road Information Collector Using Smartphone for Measuring Road Width Based on Object and Lane Detection. Int. J. Interact. Mob. Technol. 2020, 14, 42–61. [Google Scholar] [CrossRef] [Green Version]
- BPS Jumlah Penduduk Dan Keluarga Menurut Kecamatan Di Kota Bandung 2018 Dan 2019. Available online: https://bandungkota.bps.go.id/statictable/2021/03/18/1437/jumlah-penduduk-dan-keluarga-menurut-kecamatan-di-kota-bandung-2018-dan-2019.html (accessed on 26 July 2021).
- Sammut, C.; Webb, G.I. (Eds.) Mean Absolute Error. In Encyclopedia of Machine Learning; Springer: Boston, MA, USA, 2010; p. 652. ISBN 978-0-387-30164-8. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Type | Equivalency |
|---|---|
| Car (LV) | 1 |
| Motorcycle (MC) | 0.2 |
| Bus & Truck (HV) | 1.3 |
| Number of Citizens (Millions) | City Size Factor |
|---|---|
| >3.0 | 1.05 |
| 1.0–3.0 | 1 |
| 0.5–1.0 | 0.94 |
| 0.1–0.5 | 0.83 |
| <0.1 | 0.82 |
| Vehicle Speed (KpH) | Line Equation |
|---|---|
| 30 | |
| 40 | |
| 50 | |
| 60 | |
| 70 |
| Gradient Value | CCTV Point of View | Vehicle Movement Direction | ||
|---|---|---|---|---|
 | 0 | Right side | ||
| Left side | ||||
 | Right side | |||
| Left side | ||||
 | Left side | |||
| Right side | ||||
 | Left side | |||
| Right side | ||||
 | Right side | |||
| Left side | ||||
 | Right side | |||
| Left side |
| Vehicle Type | Vehicle Length (Meters) |
|---|---|
| Car | 4.5 |
| Motorcycle | 2.2 |
| Bus | 12.5 |
| Truck | 12.19 |
| No | Observed Area | Type CCTV | No | Observed Area | Type CCTV |
|---|---|---|---|---|---|
| 1 | Merdeka-Aceh Intersection | PTZ | 6 | Cihapit Intersection | PTZ |
| 2 | Aceh Intersection | PTZ | 7 | Anggrek Road Segment | Static |
| 3 | Trunojoyo Intersection | PTZ | 8 | Pramuka–Cihapit Road Segment | Static |
| 4 | Trunojoyo Road Segment | PTZ | 9 | Telkom Intersection | Static |
| 5 | Lombok Intersection | PTZ | 10 | Banda Intersection | Static |
| Detection | Actual | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Car | Motorcycle | Bus | Truck | Car | Motorcycle | Bus | Truck | ||||||||
| VL | VR | VL | VR | VL | VR | VL | VR | VL | VR | VL | VR | VL | VR | VL | VR |
| 2 | 2 | 4 | 1 | 0 | 0 | 0 | 0 | 2 | 6 | 7 | 6 | 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 2 | 2 | 2 | 0 | 0 | 0 | 0 |
| 5 | 0 | 2 | 1 | 1 | 0 | 0 | 0 | 9 | 0 | 1 | 7 | 0 | 0 | 0 | 0 |
| 4 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 5 | 3 | 8 | 1 | 0 | 0 | 0 | 0 |
| 1 | 3 | 2 | 2 | 0 | 1 | 0 | 0 | 2 | 4 | 3 | 11 | 1 | 0 | 0 | 0 |
| 2 | 5 | 0 | 1 | 0 | 0 | 0 | 0 | 4 | 7 | 1 | 2 | 0 | 0 | 0 | 0 |
| 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 3 | 4 | 0 | 5 | 1 | 0 | 0 | 0 |
| 5 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 6 | 2 | 3 | 2 | 0 | 0 | 0 | 0 |
| 3 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 5 | 7 | 1 | 2 | 0 | 0 | 0 | 0 |
| 4 | 0 | 1 | 4 | 0 | 0 | 0 | 0 | 7 | 0 | 4 | 8 | 0 | 0 | 0 | 0 |
| 5 | 5 | 2 | 2 | 0 | 0 | 0 | 0 | 6 | 8 | 2 | 8 | 0 | 0 | 0 | 0 |
| 5 | 2 | 5 | 1 | 0 | 0 | 0 | 0 | 3 | 2 | 10 | 1 | 0 | 0 | 0 | 0 |
| 3 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 4 | 0 | 0 | 0 | 0 | 0 |
| 0 | 2 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 6 | 2 | 6 | 0 | 0 | 0 | 0 |
| 1 | 2 | 1 | 2 | 0 | 0 | 0 | 0 | 2 | 4 | 3 | 4 | 0 | 0 | 0 | 0 |
| 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 1 | 1 | 6 | 0 | 0 | 0 | 0 |
| 1 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 4 | 1 | 2 | 0 | 0 | 0 | 0 |
| 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 5 | 0 | 0 | 0 | 0 | 0 |
| 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 3 | 1 | 6 | 1 | 1 | 0 | 0 | 0 | 0 | 3 | 1 | 7 | 1 | 0 | 0 | 0 |
| 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 3 | 0 | 1 | 0 | 0 | 0 | 0 |
| 3 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 2 | 0 | 0 | 0 | 0 |
| 3 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 4 | 2 | 2 | 1 | 0 | 0 | 0 | 0 |
| 4 | 3 | 0 | 0 | 2 | 0 | 0 | 0 | 7 | 5 | 3 | 0 | 1 | 0 | 0 | 0 |
| 5 | 3 | 2 | 0 | 0 | 0 | 0 | 0 | 8 | 2 | 4 | 0 | 0 | 0 | 0 | 0 |
| 5 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 8 | 0 | 4 | 1 | 0 | 0 | 0 | 0 |
| 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 4 | 0 | 0 | 0 | 0 | 0 |
| 4 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 5 | 2 | 3 | 3 | 0 | 0 | 0 | 0 |
| 4 | 2 | 2 | 2 | 0 | 0 | 0 | 0 | 4 | 3 | 7 | 9 | 0 | 0 | 0 | 0 |
| Testing | Car | Motorcycle | Bus | Truck | ||||
|---|---|---|---|---|---|---|---|---|
| VL | VR | VL | VR | VL | VR | VL | VR | |
| 1 | 0 | 4 | 3 | 5 | 0 | 0 | 0 | 0 |
| 2 | 0 | 1 | 2 | 1 | 0 | 0 | 0 | 0 |
| 3 | 4 | 0 | 1 | 6 | 0 | 0 | 1 | 0 |
| 4 | 1 | 3 | 6 | 1 | 0 | 0 | 0 | 0 |
| 5 | 1 | 1 | 1 | 9 | 0 | 0 | 1 | 1 |
| 6 | 2 | 2 | 1 | 1 | 0 | 0 | 0 | 0 |
| 7 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 8 | 1 | 3 | 0 | 4 | 0 | 0 | 0 | 0 |
| 9 | 1 | 2 | 2 | 1 | 0 | 0 | 0 | 0 |
| 10 | 2 | 5 | 0 | 1 | 0 | 0 | 0 | 0 |
| 11 | 3 | 0 | 3 | 4 | 0 | 0 | 0 | 0 |
| 12 | 1 | 3 | 0 | 6 | 0 | 0 | 0 | 0 |
| 13 | 2 | 0 | 5 | 0 | 0 | 0 | 0 | 0 |
| 14 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| 15 | 0 | 4 | 0 | 5 | 0 | 0 | 0 | 0 |
| 16 | 1 | 2 | 2 | 2 | 0 | 0 | 0 | 0 |
| 17 | 2 | 0 | 1 | 6 | 0 | 0 | 0 | 0 |
| 18 | 2 | 2 | 1 | 2 | 0 | 0 | 0 | 0 |
| 19 | 1 | 1 | 4 | 0 | 0 | 0 | 0 | 0 |
| 20 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 21 | 3 | 2 | 1 | 0 | 0 | 0 | 0 | 0 |
| 22 | 0 | 3 | 0 | 1 | 0 | 0 | 0 | 0 |
| 23 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 24 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| 25 | 3 | 2 | 3 | 0 | 0 | 0 | 1 | 0 |
| 26 | 3 | 1 | 2 | 0 | 0 | 0 | 0 | 0 |
| 27 | 3 | 1 | 2 | 0 | 0 | 0 | 0 | 0 |
| 28 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 0 |
| 29 | 1 | 2 | 3 | 2 | 0 | 0 | 0 | 0 |
| 30 | 0 | 1 | 5 | 7 | 0 | 0 | 0 | 0 |
| Average | 2 | 2 | 2 | 2 | 0 | 0 | 1 | 1 |
| No | Left-Side of The Road (VL) | Right-Side of The Road (VR) | ||||
|---|---|---|---|---|---|---|
| Detection Speed | Actual Speed | Absolute Error | Detection Speed | Actual Speed | Absolute Error | |
| 1 | 21.16 | 25.89 | 4.73 | 9.9 | 17.06 | 7.16 |
| 2 | 21.34 | 14.18 | 7.16 | 26.76 | 20.43 | 6.33 |
| 3 | 4.65 | 6.89 | 2.24 | 0 | 0 | 0 |
| 4 | 0 | 0 | 0 | 10.4 | 20.22 | 9.82 |
| 5 | 7.33 | 4.92 | 2.41 | 11.41 | 43.54 | 32.13 |
| Average | 3.308 | 11.088 | ||||
| Detection | Actual | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Car | Motorcycle | Bus | Truck | Car | Motorcycle | Bus | Truck | ||||||||
| VL | VR | VL | VR | VL | VR | VL | VR | VL | VR | VL | VR | VL | VR | VL | VR |
| 2 | 3 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 4 | 2 | 1 | 0 | 0 | 0 | 0 |
| 4 | 2 | 0 | 1 | 0 | 0 | 1 | 0 | 4 | 1 | 0 | 5 | 0 | 0 | 0 | 0 |
| 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 1 | 1 | 0 | 0 | 0 | 0 |
| 7 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 5 | 4 | 2 | 2 | 0 | 0 | 0 | 0 |
| 3 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 6 | 0 | 2 | 2 | 0 | 0 | 0 | 0 |
| 4 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 6 | 4 | 1 | 1 | 0 | 0 | 0 | 0 |
| 0 | 1 | 4 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 4 | 1 | 0 | 0 | 1 | 0 |
| 2 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 4 | 2 | 4 | 6 | 0 | 0 | 0 | 0 |
| 2 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 1 | 3 | 16 | 5 | 0 | 0 | 0 | 0 |
| 1 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 4 | 1 | 3 | 6 | 0 | 0 | 0 | 0 |
| 1 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 5 | 2 | 3 | 0 | 0 | 0 | 0 |
| 1 | 1 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 6 | 3 | 0 | 0 | 0 | 0 |
| 4 | 1 | 1 | 2 | 0 | 0 | 0 | 0 | 6 | 3 | 4 | 2 | 0 | 0 | 1 | 0 |
| 2 | 2 | 0 | 1 | 0 | 0 | 0 | 0 | 3 | 5 | 0 | 7 | 0 | 0 | 0 | 0 |
| 1 | 3 | 3 | 0 | 0 | 0 | 0 | 0 | 2 | 4 | 7 | 4 | 0 | 0 | 0 | 0 |
| 6 | 3 | 0 | 1 | 0 | 0 | 0 | 0 | 7 | 3 | 3 | 2 | 0 | 0 | 0 | 0 |
| 2 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 4 | 5 | 5 | 0 | 0 | 0 | 0 | 0 |
| 2 | 3 | 1 | 1 | 0 | 0 | 0 | 0 | 3 | 3 | 2 | 4 | 0 | 0 | 0 | 0 |
| 1 | 3 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 4 | 14 | 0 | 0 | 0 | 0 | 0 |
| 1 | 5 | 1 | 0 | 0 | 0 | 0 | 0 | 2 | 6 | 3 | 3 | 0 | 0 | 0 | 0 |
| 7 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 9 | 3 | 2 | 4 | 0 | 0 | 0 | 0 |
| 5 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 8 | 4 | 2 | 1 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 1 | 3 | 0 | 1 | 0 | 0 | 1 | 0 |
| 1 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 4 | 1 | 1 | 6 | 0 | 0 | 1 | 0 |
| 0 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 3 | 6 | 1 | 0 | 0 | 0 | 0 |
| 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 3 | 0 | 0 | 0 | 0 |
| 4 | 2 | 1 | 2 | 0 | 0 | 0 | 0 | 5 | 3 | 1 | 6 | 0 | 0 | 0 | 0 |
| 5 | 1 | 0 | 2 | 0 | 0 | 1 | 0 | 9 | 0 | 2 | 7 | 0 | 0 | 0 | 0 |
| 6 | 2 | 0 | 1 | 0 | 0 | 0 | 0 | 7 | 2 | 1 | 1 | 0 | 0 | 0 | 0 |
| 2 | 1 | 3 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 4 | 1 | 0 | 0 | 0 | 0 |
| Testing | Car | Motorcycle | Bus | Truck | ||||
|---|---|---|---|---|---|---|---|---|
| VL | VR | VL | VR | VL | VR | VL | VR | |
| 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 4 | 0 | 0 | 1 | 0 |
| 3 | 0 | 3 | 1 | 1 | 0 | 0 | 0 | 0 |
| 4 | 2 | 3 | 0 | 2 | 0 | 0 | 0 | 0 |
| 5 | 3 | 0 | 1 | 1 | 0 | 0 | 1 | 0 |
| 6 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 |
| 7 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 |
| 8 | 2 | 2 | 2 | 5 | 0 | 0 | 0 | 0 |
| 9 | 1 | 3 | 11 | 5 | 0 | 0 | 0 | 0 |
| 10 | 3 | 0 | 1 | 5 | 0 | 0 | 0 | 0 |
| 11 | 2 | 2 | 2 | 3 | 0 | 0 | 0 | 0 |
| 12 | 0 | 1 | 3 | 3 | 0 | 0 | 0 | 0 |
| 13 | 2 | 2 | 3 | 0 | 0 | 0 | 1 | 0 |
| 14 | 1 | 3 | 0 | 6 | 0 | 0 | 0 | 0 |
| 15 | 1 | 1 | 4 | 4 | 0 | 0 | 0 | 0 |
| 16 | 1 | 0 | 3 | 1 | 0 | 0 | 0 | 0 |
| 17 | 2 | 3 | 5 | 0 | 0 | 1 | 1 | 0 |
| 18 | 1 | 0 | 1 | 3 | 0 | 0 | 0 | 0 |
| 19 | 0 | 1 | 11 | 0 | 0 | 0 | 0 | 0 |
| 20 | 1 | 1 | 2 | 3 | 0 | 0 | 0 | 0 |
| 21 | 2 | 2 | 1 | 4 | 1 | 0 | 0 | 0 |
| 22 | 3 | 3 | 2 | 0 | 0 | 0 | 1 | 0 |
| 23 | 1 | 3 | 0 | 1 | 0 | 0 | 0 | 2 |
| 24 | 3 | 0 | 1 | 5 | 0 | 0 | 0 | 0 |
| 25 | 1 | 1 | 3 | 1 | 0 | 0 | 0 | 0 |
| 26 | 1 | 1 | 0 | 3 | 0 | 0 | 0 | 0 |
| 27 | 1 | 1 | 0 | 4 | 0 | 0 | 0 | 0 |
| 28 | 4 | 1 | 2 | 5 | 0 | 0 | 1 | 0 |
| 29 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 30 | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 |
| Average | 2 | 2 | 3 | 3 | 1 | 1 | 1 | 1 |
| No | Left-Side of The Road (VL) | Right-Side of the Road (VR) | ||||
|---|---|---|---|---|---|---|
| Detection Speed | Actual Speed | Absolute Error | Detection Speed | Actual Speed | Absolute Error | |
| 1 | 21.29 | 22.78 | 1.49 | 0 | 0 | 0 |
| 2 | 17.64 | 19.12 | 1.48 | 50 | 37.7 | 12.3 |
| 3 | 21.23 | 20.49 | 0.74 | 9.64 | 38.23 | 28.59 |
| 4 | 12.19 | 17.17 | 4.98 | 4.28 | 53.42 | 49.14 |
| 5 | 17.93 | 20.82 | 2.89 | 10.21 | 31.29 | 21.08 |
| Average | 2.316 | 22.222 | ||||
| Detection | Actual | ||||||
|---|---|---|---|---|---|---|---|
| Car | Motorcycle | Bus | Truck | Car | Motorcycle | Bus | Truck |
| 26 | 0 | 1 | 2 | 23 | 18 | 0 | 0 |
| 8 | 2 | 1 | 2 | 7 | 34 | 0 | 0 |
| 5 | 0 | 0 | 0 | 6 | 16 | 0 | 0 |
| 5 | 0 | 0 | 0 | 8 | 8 | 0 | 0 |
| 25 | 3 | 1 | 1 | 21 | 27 | 0 | 0 |
| 5 | 3 | 0 | 1 | 13 | 15 | 0 | 0 |
| 16 | 2 | 0 | 0 | 21 | 12 | 0 | 0 |
| 3 | 5 | 0 | 0 | 26 | 15 | 0 | 0 |
| 4 | 4 | 0 | 0 | 10 | 16 | 0 | 0 |
| 13 | 3 | 0 | 0 | 23 | 17 | 0 | 0 |
| 10 | 6 | 1 | 1 | 16 | 8 | 1 | 0 |
| 6 | 1 | 0 | 2 | 17 | 4 | 0 | 0 |
| 5 | 2 | 0 | 0 | 5 | 10 | 0 | 0 |
| 5 | 4 | 2 | 0 | 15 | 10 | 0 | 0 |
| 5 | 9 | 0 | 0 | 6 | 13 | 0 | 0 |
| 26 | 5 | 0 | 3 | 23 | 17 | 0 | 0 |
| 5 | 7 | 0 | 2 | 12 | 18 | 0 | 0 |
| 10 | 7 | 1 | 0 | 19 | 22 | 0 | 0 |
| 9 | 3 | 2 | 0 | 15 | 17 | 0 | 0 |
| 3 | 5 | 0 | 0 | 7 | 6 | 0 | 0 |
| 0 | 5 | 0 | 0 | 7 | 10 | 0 | 0 |
| 4 | 4 | 0 | 0 | 5 | 11 | 0 | 0 |
| 6 | 13 | 0 | 0 | 8 | 19 | 0 | 0 |
| 6 | 4 | 0 | 2 | 7 | 12 | 0 | 0 |
| 23 | 5 | 1 | 0 | 22 | 18 | 0 | 1 |
| 5 | 2 | 0 | 0 | 10 | 7 | 0 | 0 |
| 11 | 5 | 0 | 0 | 14 | 9 | 0 | 0 |
| 15 | 4 | 1 | 2 | 20 | 17 | 0 | 1 |
| 7 | 7 | 1 | 2 | 14 | 18 | 0 | 0 |
| 13 | 1 | 4 | 2 | 19 | 20 | 0 | 0 |
| Testing | Car | Motorcycle | Bus | Truck |
|---|---|---|---|---|
| 1 | 3 | 18 | 1 | 2 |
| 2 | 1 | 32 | 1 | 2 |
| 3 | 1 | 16 | 0 | 0 |
| 4 | 3 | 8 | 0 | 0 |
| 5 | 4 | 24 | 1 | 1 |
| 6 | 8 | 12 | 0 | 1 |
| 7 | 5 | 10 | 0 | 0 |
| 8 | 23 | 10 | 0 | 0 |
| 9 | 6 | 12 | 0 | 0 |
| 10 | 10 | 14 | 0 | 0 |
| 11 | 6 | 2 | 0 | 1 |
| 12 | 11 | 3 | 0 | 2 |
| 13 | 0 | 8 | 0 | 0 |
| 14 | 10 | 6 | 2 | 0 |
| 15 | 1 | 4 | 0 | 0 |
| 16 | 3 | 12 | 0 | 3 |
| 17 | 7 | 11 | 0 | 2 |
| 18 | 9 | 15 | 1 | 0 |
| 19 | 6 | 14 | 2 | 0 |
| 20 | 4 | 1 | 0 | 0 |
| 21 | 7 | 5 | 0 | 0 |
| 22 | 1 | 7 | 0 | 0 |
| 23 | 2 | 6 | 0 | 0 |
| 24 | 1 | 8 | 0 | 2 |
| 25 | 1 | 13 | 1 | 1 |
| 26 | 5 | 5 | 0 | 0 |
| 27 | 3 | 4 | 0 | 0 |
| 28 | 5 | 13 | 1 | 1 |
| 29 | 7 | 11 | 1 | 2 |
| 30 | 6 | 19 | 4 | 2 |
| Average | 6 | 11 | 1 | 1 |
| No | Right-Side of the Road (VR) | ||
|---|---|---|---|
| Detected Speed | Actual Speed | Absolute Error | |
| 1 | 13.67 | 21.51 | 7.84 |
| 2 | 6.64 | 12.71 | 6.07 |
| 3 | 20.26 | 30.37 | 10.11 |
| 4 | 14.1 | 36.17 | 22.07 |
| 5 | 16.64 | 46.85 | 30.21 |
| Average | 15.26 | ||
| Location | Cars | Motorcycles | Buses | Trucks | Road Width | DS | Traffic Condition | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Juanda–Merdeka | 12 | 10 | 0 | 1 | 14.8 | 70 | 100 | 5508 | 10,389.6 | 0.757 | 3 |
| Trunojoyo–Merdeka | 13 | 2 | 0 | 0 | 5.6 | 50 | 120 | 4824 | 3931.2 | 2.945 | 3 |
| Merdeka–Trunojoyo | 2 | 1 | 0 | 0 | 5.6 | 50 | 120 | 792 | 3931.2 | 0.484 | 1 |
| Pramuka–Cihapit | 2 | 2 | 0 | 0 | 4.8 | 1 | 1 | 864 | 3369.6 | 0.256 | 1 |
| Cihapit–Pramuka | 2 | 0 | 0 | 0 | 4.8 | 1 | 1 | 720 | 3369.6 | 0.214 | 0 |
| Trunojoyo–Merdeka | 9 | 4 | 1 | 4 | 5.6 | 50 | 120 | 5868 | 3931.2 | 3.582 | 3 |
| Location | Traffic Information | DS | Traffic Condition |
|---|---|---|---|
| Lombok–Pramuka | currentSpeed: 27 freeFlowSpeed: 35 | 0.69 | 2 |
| Seram–Saparua | currentSpeed: 27 freeFlowSpeed: 27 | 0 | 0 |
| Gudang Utara–Laswi | currentSpeed: 26 freeFlowSpeed: 35 | 0.77 | 3 |
| Days | Rush Hour | Weather | Temperature | Humidity | Traffic Condition |
|---|---|---|---|---|---|
| 4 | 0 | 0.5 | 0.74 | 0.19 | 3 |
| 1 | 0 | 0.75 | 0.72 | 0.43 | 3 |
| 6 | 0 | 0.62 | 0.71 | 0.43 | 3 |
| 3 | 1 | 0.5 | 0.78 | 0.09 | 2 |
| 4 | 0 | 0.5 | 0.74 | 0.19 | 3 |
| 0 | 1 | 0.62 | 0.76 | 0.55 | 0 |
| 4 | 0 | 0.25 | 0.78 | 0.11 | 3 |
| Days | Rush Hour | Weather | Temperature | Humidity | Traffic Condition |
|---|---|---|---|---|---|
| 2 | 1 | 0.5 | 0.76 | 0.55 | 0 |
| 2 | 1 | 0.25 | 0.76 | 0.55 | 3 |
| 1 | 0 | 0.62 | 0.72 | 0.43 | 2 |
| 1 | 0 | 0.75 | 0.72 | 0.43 | 3 |
| 6 | 0 | 0.5 | 0.76 | 0.55 | 2 |
| 0 | 0 | 0.5 | 0.73 | 0.35 | 3 |
| 4 | 1 | 0.25 | 0.78 | 0.11 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasution, S.M.; Husni, E.; Kuspriyanto, K.; Yusuf, R. Heterogeneous Traffic Condition Dataset Collection for Creating Road Capacity Value. Big Data Cogn. Comput. 2023, 7, 40. https://doi.org/10.3390/bdcc7010040
Nasution SM, Husni E, Kuspriyanto K, Yusuf R. Heterogeneous Traffic Condition Dataset Collection for Creating Road Capacity Value. Big Data and Cognitive Computing. 2023; 7(1):40. https://doi.org/10.3390/bdcc7010040
Chicago/Turabian StyleNasution, Surya Michrandi, Emir Husni, Kuspriyanto Kuspriyanto, and Rahadian Yusuf. 2023. "Heterogeneous Traffic Condition Dataset Collection for Creating Road Capacity Value" Big Data and Cognitive Computing 7, no. 1: 40. https://doi.org/10.3390/bdcc7010040
APA StyleNasution, S. M., Husni, E., Kuspriyanto, K., & Yusuf, R. (2023). Heterogeneous Traffic Condition Dataset Collection for Creating Road Capacity Value. Big Data and Cognitive Computing, 7(1), 40. https://doi.org/10.3390/bdcc7010040