
Applications of the (G′/G2)-Expansion Method for Solving Certain Nonlinear Conformable Evolution Equations




Abstract
:1. Introduction
2. Conformable Derivative and Its Properties
- (1)
- (2)
- for all
- (3)
- for all
- (4)
- (5)
- (6)
- If, in addition, f is differentiable, then .
- (1)
- .
- (2)
- .
- (3)
- .
- (4)
- .
- (1)
- If , then .
- (2)
- If , then .
- (3)
- If , then .
- (4)
- If , then .
- (5)
- For some positive integer n, further assume that f is -times differentiable at . In general, if , then .
3. Algorithm of the -Expansion Method
4. Applications of the -Expansion Method
4.1. The -Dimensional Conformable Time Integro-Differential Sawada–Kotera Equation
4.2. The (3 + 1)-Dimensional Conformable Time Modified KdV–Zakharov–Kuznetsov Equation
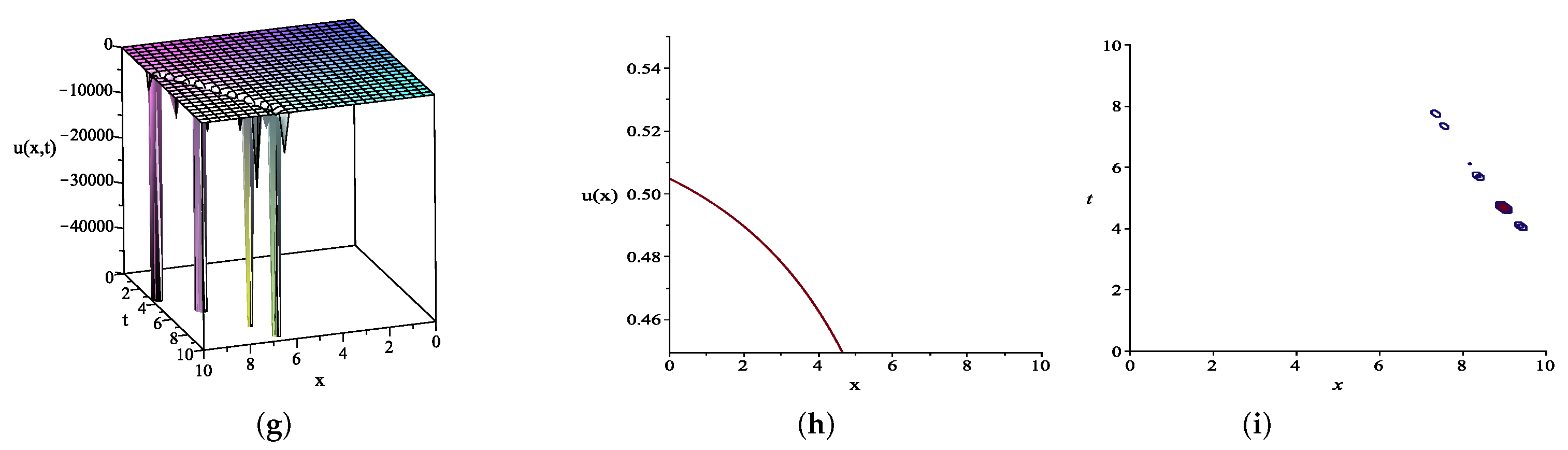
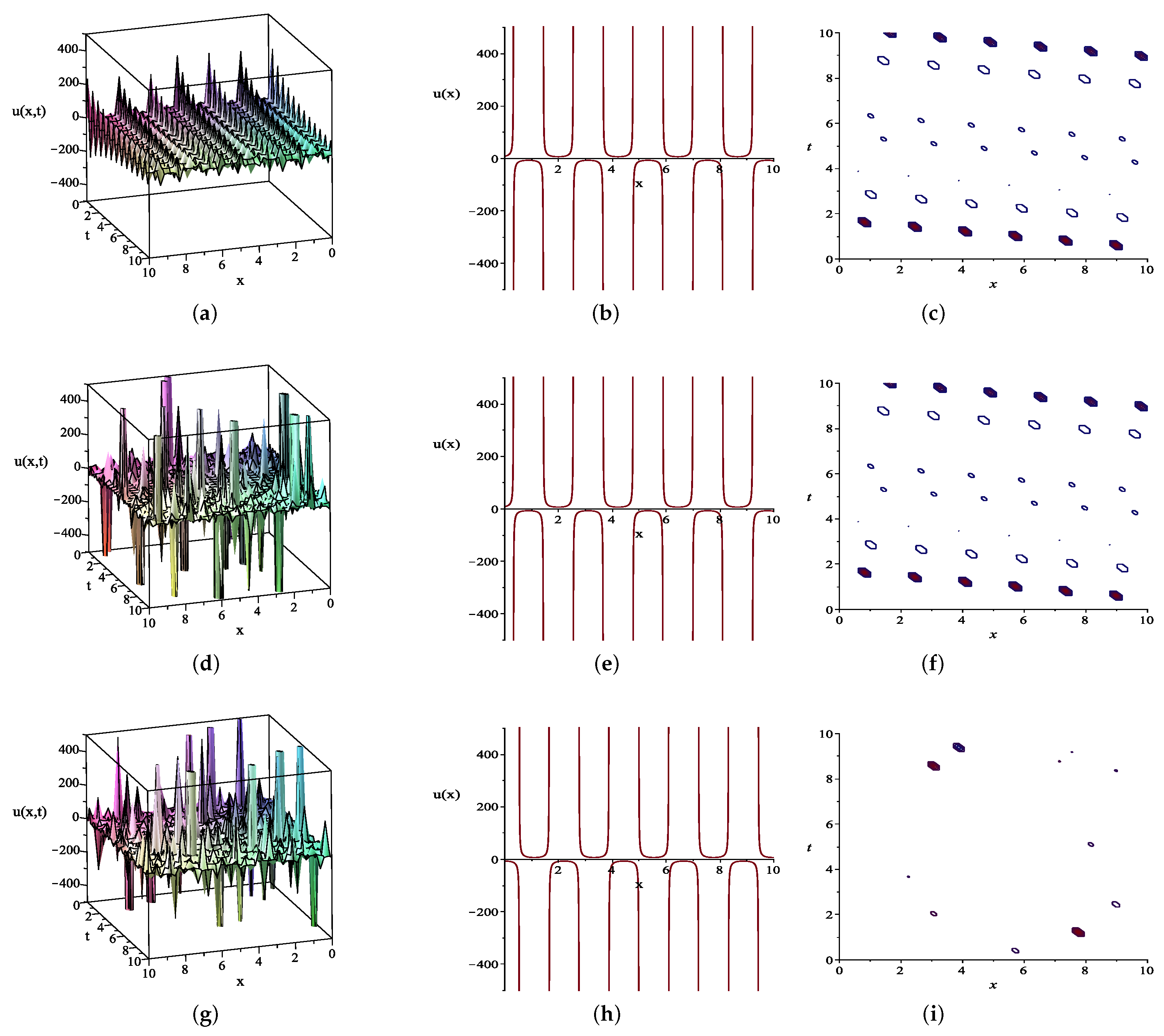
5. Graphical Representations of the Selected Solutions
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lü, X. Madelung fluid description on a generalized mixed nonlinear Schrödinger equation. Nonlinear Dyn. 2015, 81, 239–247. [Google Scholar] [CrossRef]
- Lü, X.; Ma, W.X.; Yu, J.; Lin, F.; Khalique, C.M. Envelope bright-and dark-soliton solutions for the Gerdjikov–Ivanov model. Nonlinear Dyn. 2015, 82, 1211–1220. [Google Scholar] [CrossRef]
- Seadawy, A.R. Stability analysis solutions for nonlinear three-dimensional modified Korteweg–de Vries–Zakharov–Kuznetsov equation in a magnetized electron–positron plasma. Phys. A Stat. Mech. Appl. 2016, 455, 44–51. [Google Scholar] [CrossRef]
- Hayward, R.; Biancalana, F. Constructing new nonlinear evolution equations with supersymmetry. J. Phys. A Math. Theor. 2018, 51, 275202. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, I.; Siraj-ul-Islam. Local meshless method for PDEs arising from models of wound healing. Appl. Math. Model. 2017, 48, 688–710. [Google Scholar]
- Vakhnenko, V.; Parkes, E. Approach in theory of nonlinear evolution equations: The Vakhnenko-Parkes equation. Adv. Math. Phys. 2016, 2016, 2916582. [Google Scholar] [CrossRef] [Green Version]
- Manafian, J. Optical soliton solutions for Schrödinger type nonlinear evolution equations by the tan (Φ (ξ)/2)-expansion method. Optik 2016, 127, 4222–4245. [Google Scholar] [CrossRef]
- Bhrawy, A.; Alhuthali, M.S.; Abdelkawy, M. New solutions for (1 + 1)-dimensional and (2 + 1)-dimensional Ito equations. Math. Probl. Eng. 2012, 2012, 537930. [Google Scholar] [CrossRef] [Green Version]
- Roshid, M.M.; Roshid, H.O. Exact and explicit traveling wave solutions to two nonlinear evolution equations which describe incompressible viscoelastic Kelvin-Voigt fluid. Heliyon 2018, 4, e00756. [Google Scholar] [CrossRef] [Green Version]
- Bustamante-Castañeda, F.; Caputo, J.G.; Cruz-Pacheco, G.; Knippel, A.; Mouatamide, F. Epidemic model on a network: Analysis and applications to COVID-19. Phys. A Stat. Mech. Appl. 2021, 564, 125520. [Google Scholar] [CrossRef]
- Ghafoor, A.; Firdous, S.; Zubair, T.; Iftikhar, A.; Zainab, S.; Mohyud-Din, S.T. (G′/G,1/G)–Expansion method for generalized ZK, Sharma–Tasso–Olver (STO) and modified ZK equations. QSci. Connect 2013, 2013, 24. [Google Scholar] [CrossRef]
- Hossain, A.K.S.; Akbar, M.A. Traveling wave solutions of Benny Luke equation via the enhanced (G’/G)-expansion method. Ain Shams Eng. J. 2021. [Google Scholar] [CrossRef]
- He, J.H. Exp-function method for fractional differential equations. Int. J. Nonlinear Sci. Numer. Simul. 2013, 14, 363–366. [Google Scholar] [CrossRef]
- Zheng, B.; Feng, Q. The Jacobi elliptic equation method for solving fractional partial differential equations. In Abstract and Applied Analysis; Hindawi: London, UK, 2014; Volume 2014. [Google Scholar]
- Biswas, A.; Sonmezoglu, A.; Ekici, M.; Mirzazadeh, M.; Zhou, Q.; Moshokoa, S.P.; Belic, M. Optical soliton perturbation with fractional temporal evolution by generalized Kudryashov’s method. Optik 2018, 164, 303–310. [Google Scholar] [CrossRef]
- Baskonus, H.M.; Sulaiman, T.A.; Bulut, H. Novel complex and hyperbolic forms to the strain wave equation in microstructured solids. Opt. Quantum Electron. 2018, 50, 14. [Google Scholar] [CrossRef]
- Mohyud-Din, S.T.; Nawaz, T.; Azhar, E.; Akbar, M.A. Fractional sub-equation method to space–time fractional Calogero-Degasperis and potential Kadomtsev-Petviashvili equations. J. Taibah Univ. Sci. 2017, 11, 258–263. [Google Scholar] [CrossRef] [Green Version]
- Manafian, J.; Foroutan, M. Application of tan(ϕ(ξ)/2)-expansion method for the time-fractional Kuramoto–Sivashinsky equation. Opt. Quantum Electron. 2017, 49, 272. [Google Scholar] [CrossRef]
- Seadawy, A.R. Three-dimensional nonlinear modified Zakharov–Kuznetsov equation of ion-acoustic waves in a magnetized plasma. Comput. Math. Appl. 2016, 71, 201–212. [Google Scholar] [CrossRef]
- Seadawy, A.R. Solitary wave solutions of two-dimensional nonlinear Kadomtsev–Petviashvili dynamic equation in dust-acoustic plasmas. Pramana 2017, 89, 49. [Google Scholar] [CrossRef]
- Zhouzheng, K. G′/G2-expansion Solutions to MBBM and OBBM Equations. J. Part. Differ. Equ. 2015, 28, 158–166. [Google Scholar] [CrossRef]
- Mohyud-Din, S.T.; Bibi, S. Exact solutions for nonlinear fractional differential equations using G′/G2-expansion method. Alex. Eng. J. 2018, 57, 1003–1008. [Google Scholar] [CrossRef]
- Arshed, S.; Sadia, M. (G′/G2)-Expansion method: New traveling wave solutions for some nonlinear fractional partial differential equations. Opt. Quantum Electron. 2018, 50, 123. [Google Scholar] [CrossRef]
- Sirisubtawee, S.; Koonprasert, S. Exact traveling wave solutions of certain nonlinear partial differential equations using the (G′/G2)-expansion method. Adv. Math. Phys. 2018, 2018, 7628651. [Google Scholar] [CrossRef] [Green Version]
- Meng, Y. Expanded G′/G2-expansion method to solve separated variables for the (2 + 1)-dimensional NNV equation. Adv. Math. Phys. 2018, 2018, 9248174. [Google Scholar] [CrossRef]
- Ali, M.N.; Osman, M.; Husnine, S.M. On the analytical solutions of conformable time-fractional extended Zakharov–Kuznetsov equation through G′/G2-expansion method and the modified Kudryashov method. SeMA J. 2019, 76, 15–25. [Google Scholar] [CrossRef]
- Kaewta, S.; Sirisubtawee, S.; Khansai, N. Explicit exact solutions of the (2 + 1)-dimensional integro-differential Jaulent–Miodek evolution equation using the reliable methods. Int. J. Math. Math. Sci. 2020, 2020. [Google Scholar] [CrossRef]
- Devi, P.; Singh, K. Exact traveling wave solutions of the (2 + 1)-dimensional Boiti-Leon-Pempinelli system using G′/G2-expansion method. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2020; Volume 2214, p. 020030. [Google Scholar]
- Bilal, M.; Seadawy, A.R.; Younis, M.; Rizvi, S.; Zahed, H. Dispersive of propagation wave solutions to unidirectional shallow water wave Dullin–Gottwald–Holm system and modulation instability analysis. Math. Methods Appl. Sci. 2021, 44, 4094–4104. [Google Scholar] [CrossRef]
- Shi, Y.; Li, D. New exact solutions for the (2 + 1)-dimensional Sawada–Kotera equation. Comput. Fluids 2012, 68, 88–93. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, Y.; Xia, T. Double periodic wave solutions of the (2 + 1)-dimensional Sawada-Kotera equation. Abstr. Appl. Anal. 2014, 2014, 534017. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Chen, M.; Li, B. Lump solutions and resonance stripe solitons to the (2 + 1)-dimensional Sawada-Kotera equation. Adv. Math. Phys. 2017, 2017, 1743789. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.Q.; Ma, W.X. Lump solutions to the (2 + 1)-dimensional Sawada–Kotera equation. Nonlinear Dyn. 2017, 87, 2305–2310. [Google Scholar] [CrossRef]
- Hu, R. Diversity of interaction solutions to the (2 + 1)-dimensional Sawada-Kotera equation. J. Appl. Math. Phys. 2018, 6, 1692. [Google Scholar] [CrossRef] [Green Version]
- An, H.; Feng, D.; Zhu, H. General M-lump, high-order breather and localized interaction solutions to the (2 + 1)-dimensional Sawada–Kotera equation. Nonlinear Dyn. 2019, 98, 1275–1286. [Google Scholar] [CrossRef]
- Ghanbari, B.; Kuo, C.K. A variety of solitary wave solutions to the (2 + 1)-dimensional bidirectional SK and variable-coefficient SK equations. Results Phys. 2020, 18, 103266. [Google Scholar] [CrossRef]
- Konopelchenko, B.; Dubrovsky, V. Some new integrable nonlinear evolution equations in (2 + 1)-dimensions. Phys. Lett. A 1984, 102, 15–17. [Google Scholar] [CrossRef]
- Sawada, K.; Kotera, T. A method for finding N-soliton solutions of the KdV equation and KdV-like equation. Prog. Theor. Phys. 1974, 51, 1355–1367. [Google Scholar] [CrossRef] [Green Version]
- Lou, S.Y. Symmetries of the KdV equation and four hierarchies of the integrodifferential KdV equations. J. Math. Phys. 1994, 35, 2390–2396. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, H.; Chen, W. The multisoliton solutions for the (2 + 1)-dimensional Sawada-Kotera equation. Abstr. Appl. Anal. 2013, 2013, 767254. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Seadawy, A.; Arshad, M.; Wang, J. New solitary wave solutions of (3 + 1)-dimensional nonlinear extended Zakharov-Kuznetsov and modified KdV-Zakharov-Kuznetsov equations and their applications. Results Phys. 2017, 7, 899–909. [Google Scholar] [CrossRef]
- Lu, D.; Seadawy, A.; Yaro, D. Analytical wave solutions for the nonlinear three-dimensional modified Korteweg-de Vries-Zakharov-Kuznetsov and two-dimensional Kadomtsev-Petviashvili-Burgers equations. Results Phys. 2019, 12, 2164–2168. [Google Scholar] [CrossRef]
- Tariq, K.U.H.; Seadawy, A. Soliton solutions of (3 + 1)–dimensional Korteweg-de Vries Benjamin–Bona–Mahony, Kadomtsev–Petviashvili Benjamin–Bona–Mahony and modified Korteweg de Vries–Zakharov–Kuznetsov equations and their applications in water waves. J. King Saud Univ.-Sci. 2019, 31, 8–13. [Google Scholar] [CrossRef]
- Naher, H.; Abdullah, F.A.; Akbar, M.A. Generalized and improved G′/G-expansion method for (3 + 1)-dimensional modified KdV-Zakharov-Kuznetsev equation. PLoS ONE 2013, 8, e64618. [Google Scholar] [CrossRef] [PubMed]
- Islam, M.H.; Khan, K.; Akbar, M.A.; Salam, M.A. Exact traveling wave solutions of modified KdV–Zakharov–Kuznetsov equation and viscous Burgers equation. SpringerPlus 2014, 3, 105. [Google Scholar] [CrossRef] [Green Version]
- Miah, M.M.; Ali, H.S.; Akbar, M.A.; Seadawy, A.R. New applications of the two variable (G’/G, 1/G)-expansion method for closed form traveling wave solutions of integro-differential equations. J. Ocean Eng. Sci. 2019, 4, 132–143. [Google Scholar] [CrossRef]
- Gepreel, K.A.; Nofal, T.A.; Alasmari, A.A. Exact solutions for nonlinear integro-partial differential equations using the generalized Kudryashov method. J. Egypt. Math. Soc. 2017, 25, 438–444. [Google Scholar] [CrossRef]
- Guner, O.; Aksoy, E.; Bekir, A.; Cevikel, A.C. Different methods for (3 + 1)-dimensional space–time fractional modified KdV–Zakharov–Kuznetsov equation. Comput. Math. Appl. 2016, 71, 1259–1269. [Google Scholar] [CrossRef]
- Islam, M.T.; Akbar, M.A.; Azad, M.A.K. Traveling wave solutions in closed form for some nonlinear fractional evolution equations related to conformable fractional derivative. AIMS Math. 2018, 3, 625–646. [Google Scholar] [CrossRef]
- Guner, O. New exact solutions to the space–time fractional nonlinear wave equation obtained by the ansatz and functional variable methods. Opt. Quantum Electron. 2018, 50, 38. [Google Scholar] [CrossRef]
- Al-Ghafri, K.; Rezazadeh, H. Solitons and other solutions of (3 + 1)-dimensional space–time fractional modified KdV–Zakharov–Kuznetsov equation. Appl. Math. Nonlinear Sci. 2019, 4, 289–304. [Google Scholar] [CrossRef] [Green Version]
- Khalil, R.; Al Horani, M.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Chung, W.S. Fractional Newton mechanics with conformable fractional derivative. J. Comput. Appl. Math. 2015, 290, 150–158. [Google Scholar] [CrossRef]
- Çenesiz, Y.; Baleanu, D.; Kurt, A.; Tasbozan, O. New exact solutions of Burgers’ type equations with conformable derivative. Waves Random Complex Media 2017, 27, 103–116. [Google Scholar] [CrossRef]
- Sirisubtawee, S.; Koonprasert, S.; Sungnul, S. Some applications of the (G′/G,1/G)-expansion method for finding exact traveling wave solutions of nonlinear fractional evolution equations. Symmetry 2019, 11, 952. [Google Scholar] [CrossRef] [Green Version]
- Sirisubtawee, S.; Koonprasert, S.; Sungnul, S.; Leekparn, T. Exact traveling wave solutions of the space–time fractional complex Ginzburg–Landau equation and the space-time fractional Phi-4 equation using reliable methods. Adv. Differ. Equ. 2019, 2019, 219. [Google Scholar] [CrossRef]
- Sirisubtawee, S.; Koonprasert, S.; Sungnul, S. New exact solutions of the conformable space-time Sharma–Tasso–Olver equation using two reliable methods. Symmetry 2020, 12, 644. [Google Scholar] [CrossRef] [Green Version]
- Al-Ghafri, K.S. Soliton behaviours for the conformable space–time fractional complex Ginzburg–Landau equation in optical fibers. Symmetry 2020, 12, 219. [Google Scholar] [CrossRef] [Green Version]
- Hosseini, K.; Manafian, J.; Samadani, F.; Foroutan, M.; Mirzazadeh, M.; Zhou, Q. Resonant optical solitons with perturbation terms and fractional temporal evolution using improved tan (ϕ (η)/2)-expansion method and exp function approach. Optik 2018, 158, 933–939. [Google Scholar] [CrossRef]
- Abdeljawad, T. On conformable fractional calculus. J. Comput. Appl. Math. 2015, 279, 57–66. [Google Scholar] [CrossRef]
- Kumar, D.; Darvishi, M.; Joardar, A. Modified Kudryashov method and its application to the fractional version of the variety of Boussinesq-like equations in shallow water. Opt. Quantum Electron. 2018, 50, 128. [Google Scholar] [CrossRef]
- El-Ajou, A.; Al-Zhour, Z.; Oqielat, M.; Momani, S.; Hayat, T. Series solutions of nonlinear conformable fractional KdV-Burgers equation with some applications. Eur. Phys. J. Plus 2019, 134, 402. [Google Scholar] [CrossRef]
- Chen, J.; Chen, H. The G′/G2-expansion method and its application to coupled nonlinear Klein-Gordon equation. J. South China Norm. Univ. (Nat. Sci. Ed.) 2012, 44, 13. [Google Scholar]
- Conforti, M.; Mussot, A.; Kudlinski, A.; Trillo, S.; Akhmediev, N. Doubly periodic solutions of the focusing nonlinear Schrödinger equation: Recurrence, period doubling, and amplification outside the conventional modulation-instability band. Phys. Rev. A 2020, 101, 023843. [Google Scholar] [CrossRef] [Green Version]
- Eslami, M.; Rezazadeh, H.; Rezazadeh, M.; Mosavi, S.S. Exact solutions to the space–time fractional Schrödinger–Hirota equation and the space–time modified KDV–Zakharov–Kuznetsov equation. Opt. Quantum Electron. 2017, 49, 279. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Result | Sign of | Sign of | Sign Selected from ± or ∓ in Front of | ||
|---|---|---|---|---|---|
| 3.1 | + | + | − | − | − |
| − | − | + | + | + | |
| 3.2 | + | − | + | + | − |
| − | + | − | − | + | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaewta, S.; Sirisubtawee, S.; Koonprasert, S.; Sungnul, S. Applications of the (G′/G2)-Expansion Method for Solving Certain Nonlinear Conformable Evolution Equations. Fractal Fract. 2021, 5, 88. https://doi.org/10.3390/fractalfract5030088
Kaewta S, Sirisubtawee S, Koonprasert S, Sungnul S. Applications of the (G′/G2)-Expansion Method for Solving Certain Nonlinear Conformable Evolution Equations. Fractal and Fractional. 2021; 5(3):88. https://doi.org/10.3390/fractalfract5030088
Chicago/Turabian StyleKaewta, Supaporn, Sekson Sirisubtawee, Sanoe Koonprasert, and Surattana Sungnul. 2021. "Applications of the (G′/G2)-Expansion Method for Solving Certain Nonlinear Conformable Evolution Equations" Fractal and Fractional 5, no. 3: 88. https://doi.org/10.3390/fractalfract5030088
APA StyleKaewta, S., Sirisubtawee, S., Koonprasert, S., & Sungnul, S. (2021). Applications of the (G′/G2)-Expansion Method for Solving Certain Nonlinear Conformable Evolution Equations. Fractal and Fractional, 5(3), 88. https://doi.org/10.3390/fractalfract5030088