


Model-Free Fractional-Order Sliding Mode Control of Electric Drive System Based on Nonlinear Disturbance Observer

Abstract
:1. Introduction
- (1)
- The ultra-local model of the AM is established, which reduces the dependence on motor parameters.
- (2)
- A fractional-order sliding mode control method is proposed, which reduce the chattering of sliding mode control and improve dynamic performance. Speed-current no-cascade control structure is adopted to effectively simplify the system structure.
- (3)
- A model-free sliding-mode controller for asynchronous motors based on non-linear disturbance observer is designed, which not only improves the dynamic performance of the system, but also enhances the robustness of the system.
2. Fractional-Order Calculus Fundamentals
2.1. Introduction of Fractional-Order Calculus
2.2. Analysis of Fractional-Order Operators
2.3. Comparison of Fractional-Order Sliding Mode and Integer-Order Sliding Mode
3. Mathematical Model of AM
4. Design of Speed Controller for AM
4.1. Analysis of Traditional Sliding Surface with Mismatched Terms
4.2. Design of Fractional-Order Sliding Mode Controller
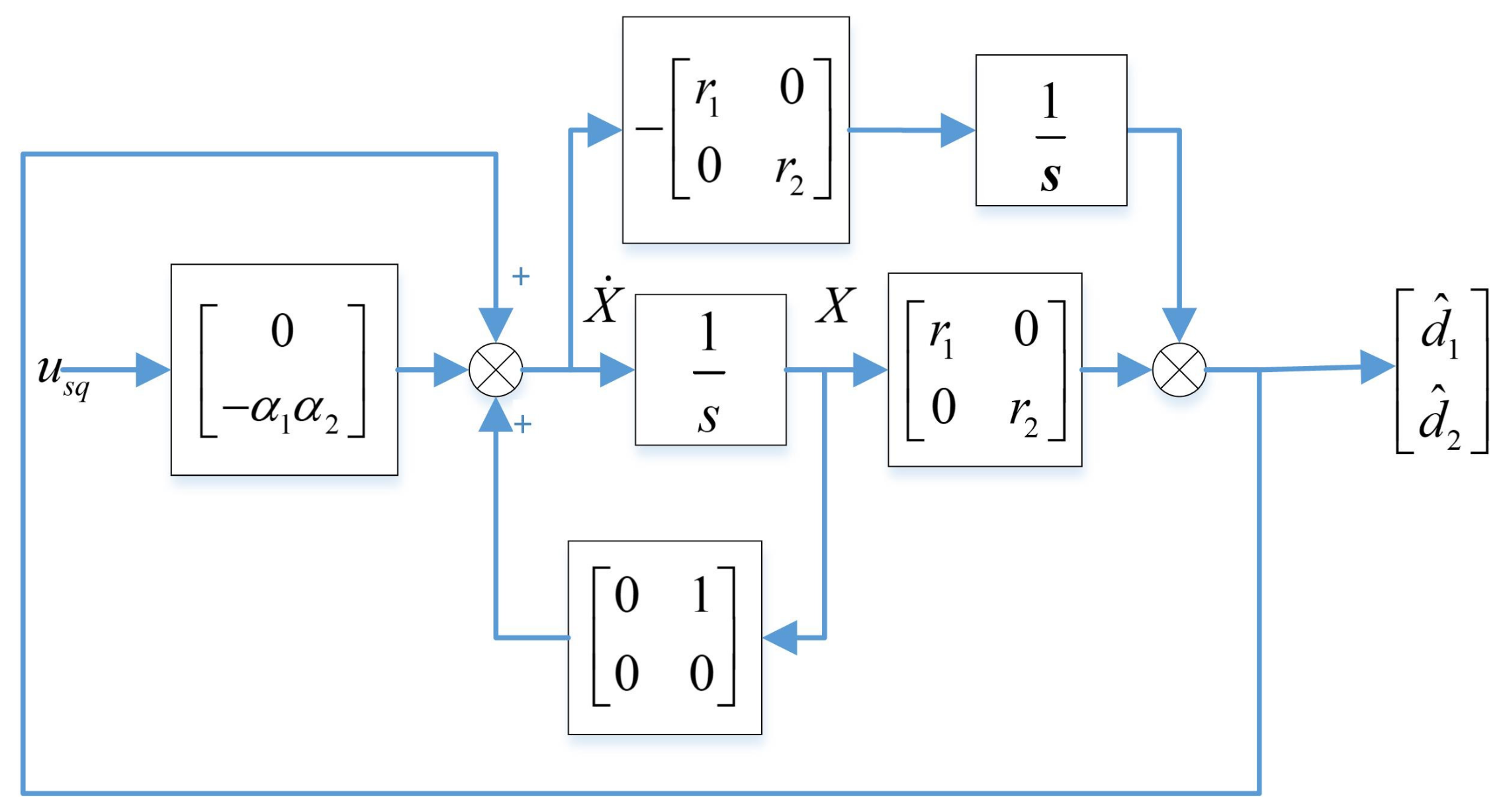
4.3. Design of Non-linear Disturbance Observer
5. Experimental Results
5.1. Low Speed Performance
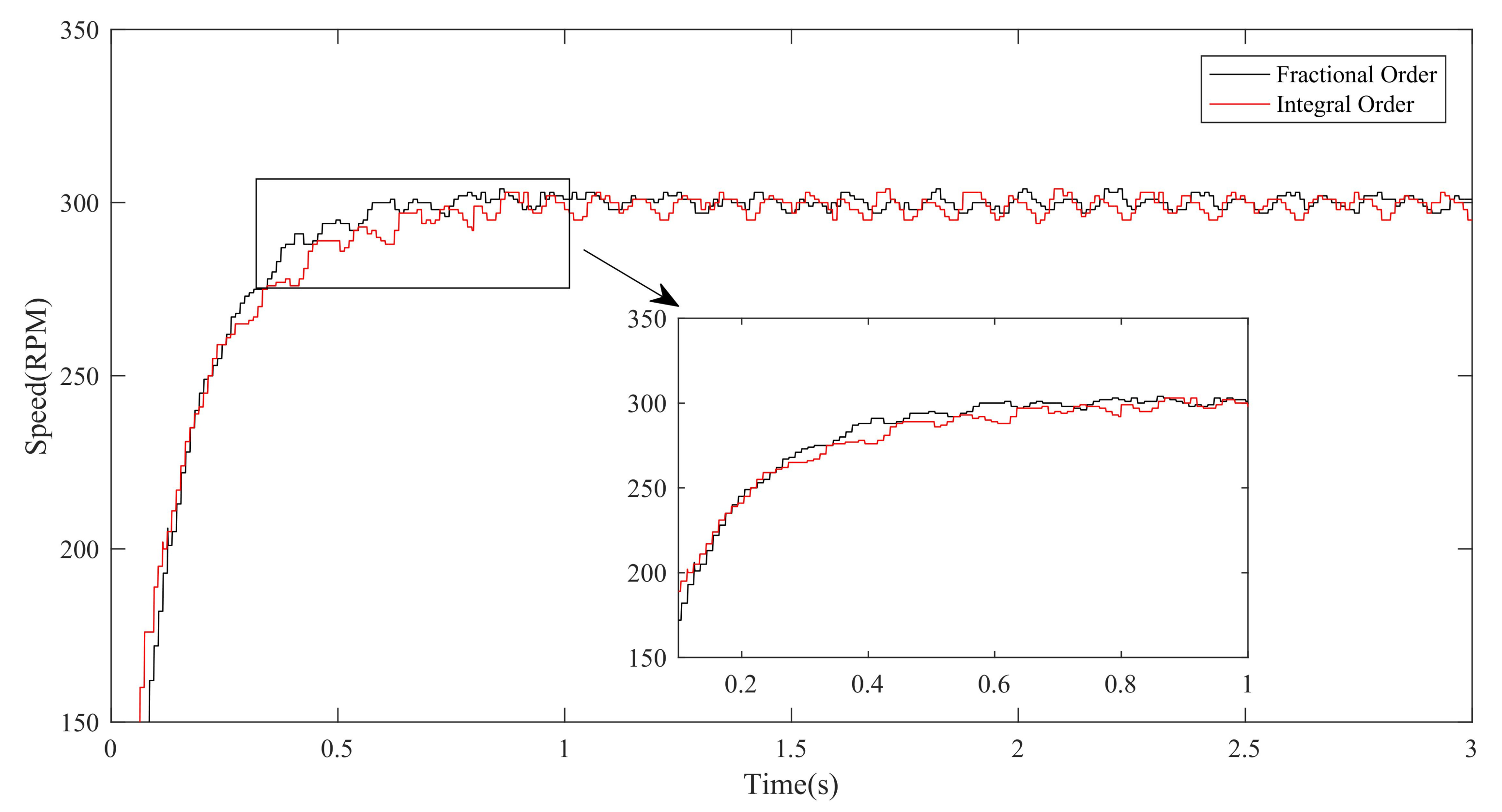
5.1.1. Low Speed Startup Performance
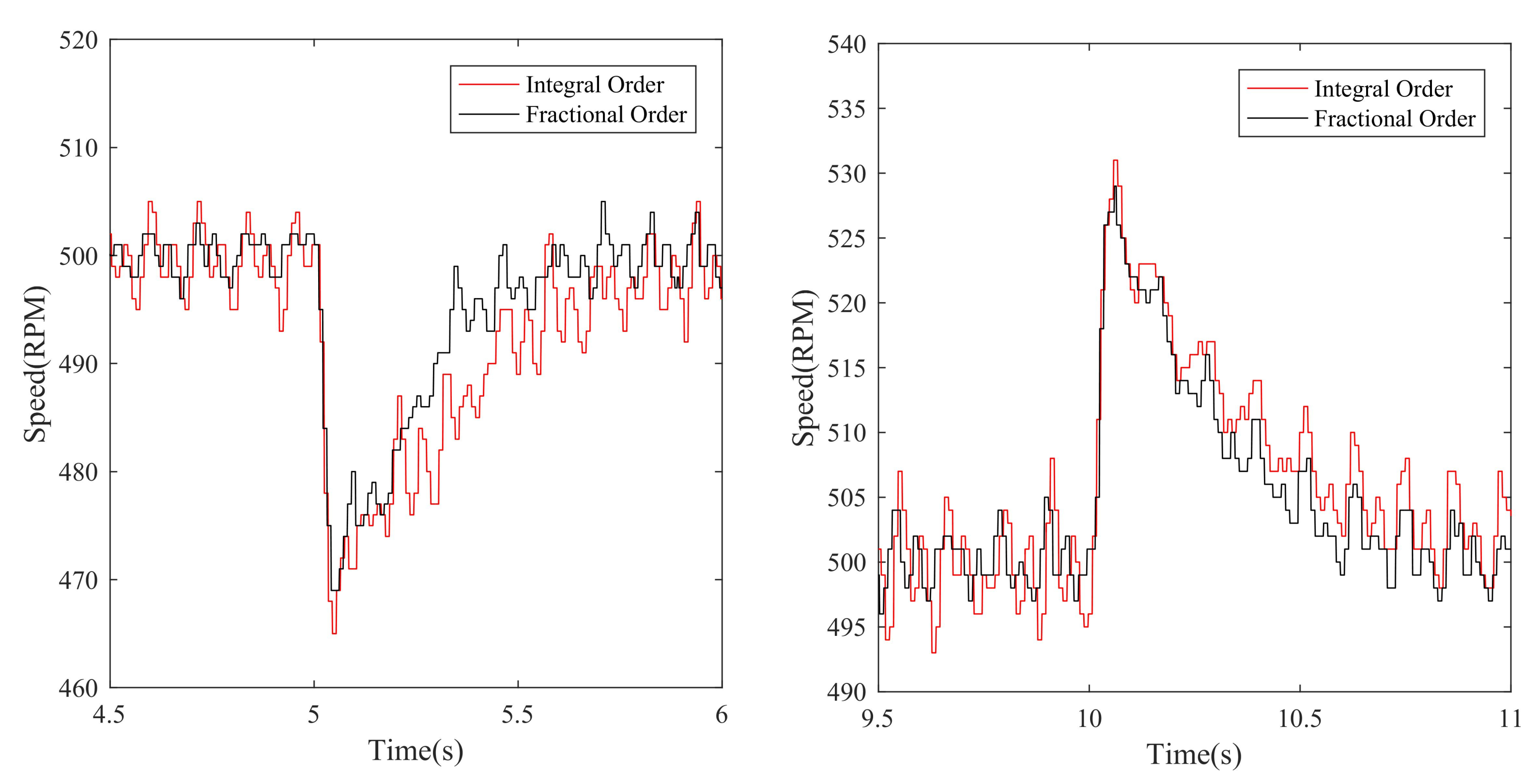
5.1.2. Low Speed Anti-Disturbance Performance
5.2. Middle Speed Performance
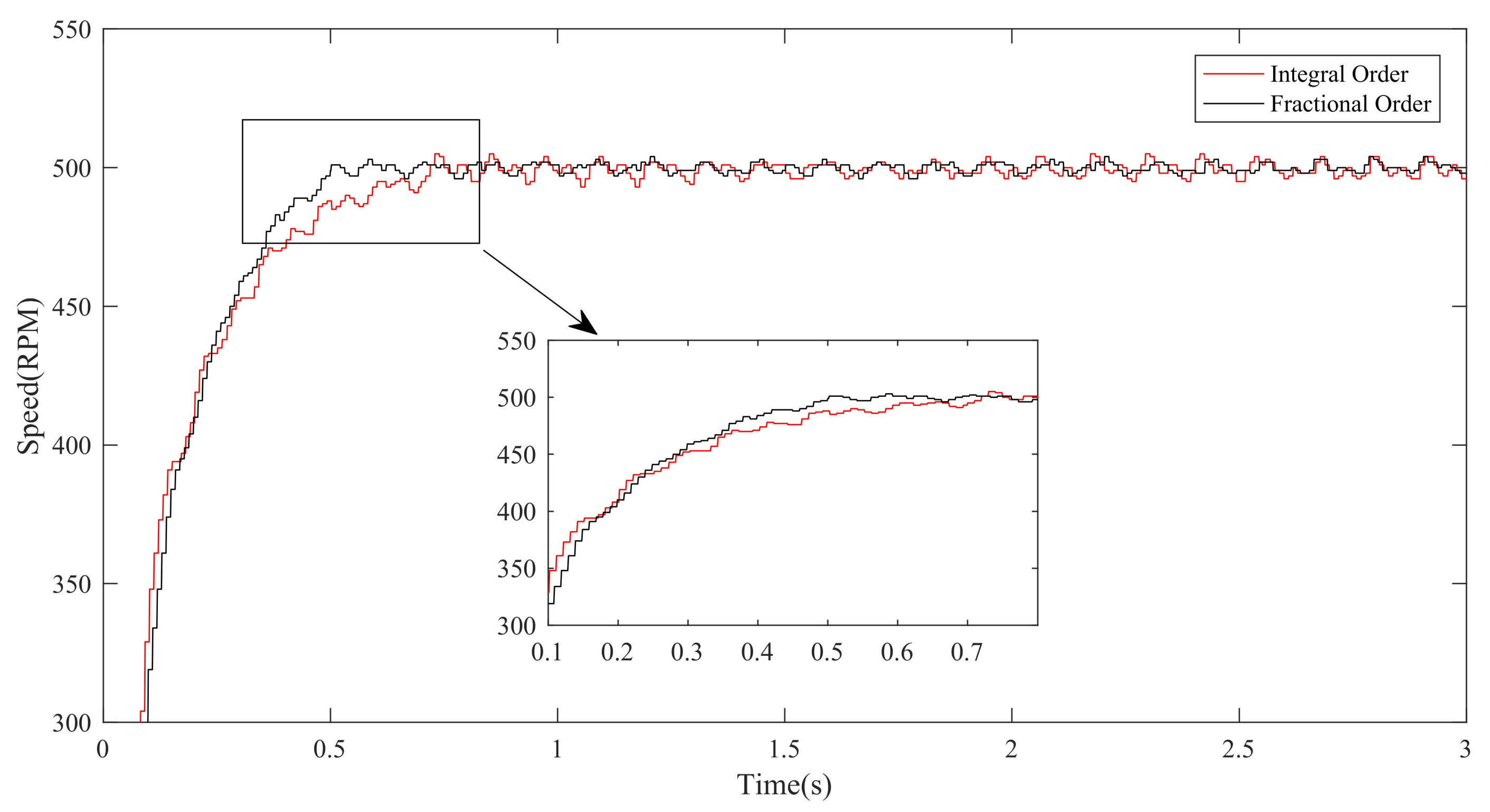
5.2.1. Middle Speed Startup Performance
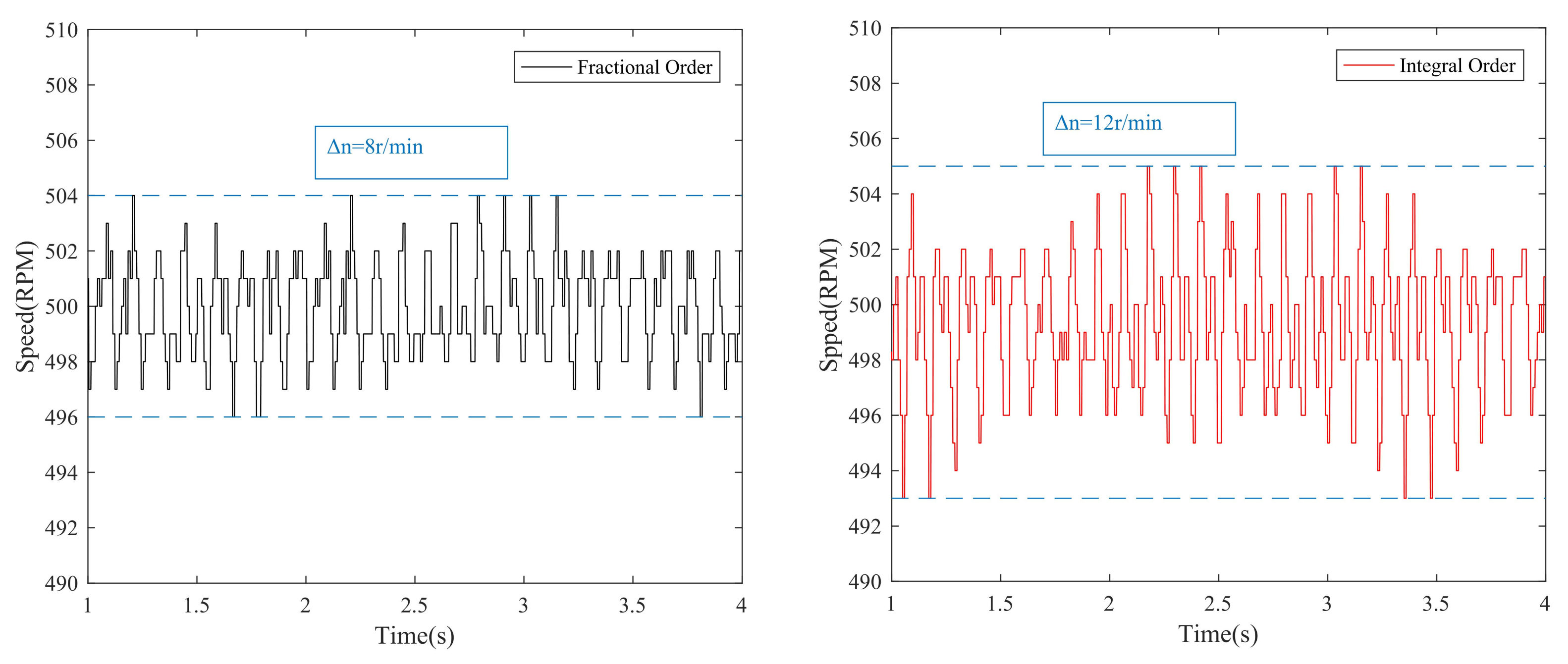
5.2.2. Middle Speed Anti-Disturbance Performance
5.3. High Speed Performance
5.3.1. High Speed Startup Performance
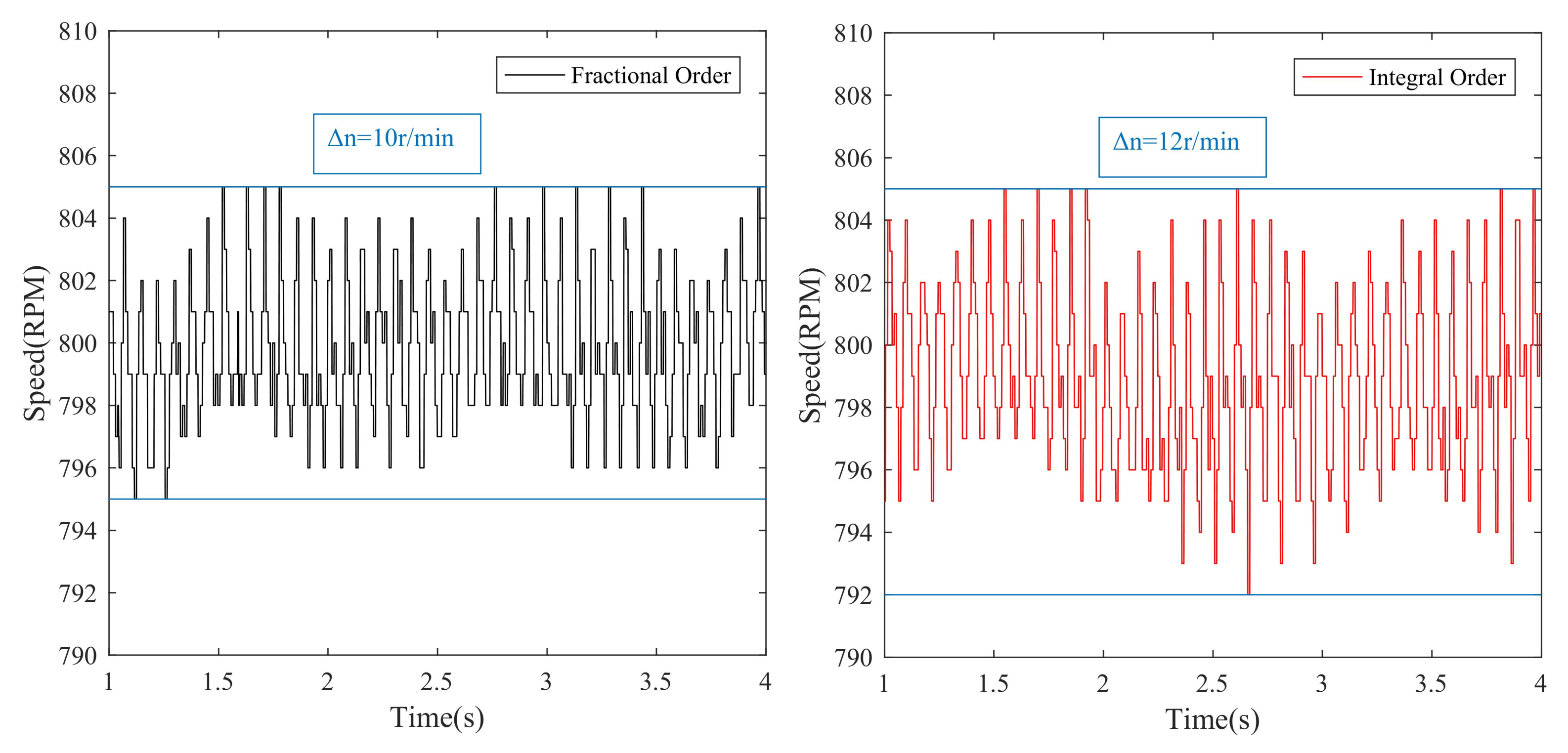
5.3.2. High Speed Anti-Disturbance Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MFFOSMC | Model-free fractional-order sliding mode control |
| MFIOSMC | Model-free integer-order sliding mode control |
| AM | Asynchronous motors |
| NDO | Non-linear disturbance observer |
| SMC | Sliding mode control |
| ISMC | Integral sliding mode control |
References
- Quintero-Manriquez, E.; Sanchez, E.N.; Antonio-Toledo, M.E.; Munoz, F. Neural control of an induction motor with regenerative braking as electric vehicle architecture. Eng. Appl. Artif. Intell. 2021, 104, 104275. [Google Scholar] [CrossRef]
- Mohanraj, D.; Gopalakrishnan, J.; Chokkalingam, B.; Mihet-Popa, L. Critical Aspects of Electric Motor Drive Controllers and Mitigation of Torque Ripple-Review. IEEE Access 2022, 10, 73635–73674. [Google Scholar] [CrossRef]
- Nagataki, M.; Kondo, K.; Yamazaki, O.; Yuki, K.; Nakazawa, Y. Online Auto-Tuning Method in Field-Orientation-Controlled Induction Motor Driving Inertial Load. IEEE Open J. Ind. Appl. 2022, 3, 125–140. [Google Scholar] [CrossRef]
- Dias, F.J.M.; Sotelo, G.G.; de Andrade Júnior, R. Performance Comparison of Superconducting Machines With Induction Motors. IEEE Trans. Appl. Supercond. 2022, 32, 1–5. [Google Scholar] [CrossRef]
- Song, S.; Meng, B.; Wang, Z. On Sliding Mode Control for Singular Fractional-Order Systems with Matched External Disturbances. Fractal Fract. 2022, 6, 366. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, J.; Sun, Z.; Xia, Y. Adaptive sliding mode disturbance observer-based composite trajectory tracking control for robot manipulator with prescribed performance. Nonlinear Dyn. 2022, 109, 2693–2704. [Google Scholar] [CrossRef]
- Sacchi, N.; Incremona, G.P.; Ferrara, A. Neural Network-Based Practical/Ideal Integral Sliding Mode Control. IEEE Control Syst. Lett. 2022, 6, 3140–3145. [Google Scholar] [CrossRef]
- Lin, H.; Liu, J.; Shen, X.; Leon, J.I.; Vazquez, S.; Alcaide, A.M.; Wu, L.; Franquelo, L.G. Fuzzy Sliding-Mode Control for Three-Level NPC AFE Rectifiers: A Chattering Alleviation Approach. IEEE Trans. Power Electron. 2022, 37, 11704–11715. [Google Scholar] [CrossRef]
- Yuan, L.; Li, J. Consensus of Discrete-Time Nonlinear Multiagent Systems Using Sliding Mode Control Based on Optimal Control. IEEE Access 2022, 10, 47275–47283. [Google Scholar] [CrossRef]
- Fei, J.; Feng, Z. Fractional-Order Finite-Time Super-Twisting Sliding Mode Control of Micro Gyroscope Based on Double-Loop Fuzzy Neural Network. IEEE Trans. Syst. 2021, 51, 7692–7706. [Google Scholar] [CrossRef]
- Dong, H.; Yang, X.; Gao, H.; Yu, X. Practical Terminal Sliding-Mode Control and Its Applications in Servo Systems. IEEE Trans. Ind. Electron. 2022, 70, 752–761. [Google Scholar] [CrossRef]
- Hou, H.; Yu, X.; Xu, L.; Rsetam, K.; Cao, Z. Finite-Time Continuous Terminal Sliding Mode Control of Servo Motor Systems. IEEE Trans. Ind. Electron. 2020, 67, 5647–5656. [Google Scholar] [CrossRef]
- Sun, X.; Cao, J.; Lei, G.; Guo, Y.; Zhu, J. A Composite Sliding Mode Control for SPMSM Drives Based on a New Hybrid Reaching Law With Disturbance Compensation. IEEE Trans. Transp. Electrif. 2021, 7, 1427–1436. [Google Scholar] [CrossRef]
- Li, T.; Liu, X. Model-Free Non-Cascade Integral Sliding Mode Control of Permanent Magnet Synchronous Motor Drive with a Fast Reaching Law. Symmetry 2021, 13, 1680. [Google Scholar] [CrossRef]
- Xu, Y.; Li, S.; Zou, J. Integral Sliding Mode Control Based Deadbeat Predictive Current Control for PMSM Drives with Disturbance Rejection. IEEE Trans. Power Electron. 2022, 37, 2845–2856. [Google Scholar] [CrossRef]
- Pan, Y.; Yang, C.; Pan, L.; Yu, H. Integral Sliding Mode Control: Performance, Modification, and Improvement. IEEE Trans. Ind. Inform. 2018, 14, 3087–3096. [Google Scholar] [CrossRef]
- Huang, S.; Xiong, L.; Wang, J.; Li, P.; Wang, Z.; Ma, M. Fixed-Time Fractional-Order Sliding Mode Controller for Multimachine Power Systems. IEEE Trans. Power Syst. 2021, 36, 2866–2876. [Google Scholar] [CrossRef]
- Wang, B.; Wang, S.; Peng, Y.; Pi, Y.; Luo, Y. Design and High-Order Precision Numerical Implementation of Fractional-Order PI Controller for PMSM Speed System Based on FPGA. Fractal Fract. 2022, 6, 218. [Google Scholar] [CrossRef]
- Zheng, W.; Huang, R.; Luo, Y.; Chen, Y.; Wang, X.; Chen, Y. A Look-Up Table Based Fractional Order Composite Controller Synthesis Method for the PMSM Speed Servo System. Fractal Fract. 2022, 6, 47. [Google Scholar] [CrossRef]
- Babes, B.; Mekhilef, S.; Boutaghane, A.; Rahmani, L. Fuzzy Approximation-Based Fractional-Order Nonsingular Terminal Sliding Mode Controller for DC–DC Buck Converters. IEEE Trans. Power Electron. 2022, 37, 2749–2760. [Google Scholar] [CrossRef]
- Efe, M.Ö. Fractional Order Systems in Industrial Automation—A Survey. IEEE Trans. Ind. Inform. 2011, 7, 582–591. [Google Scholar] [CrossRef]
- Xu, S.; Sun, G.; Ma, Z.; Li, X. Fractional-Order Fuzzy Sliding Mode Control for the Deployment of Tethered Satellite System Under Input Saturation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 747–756. [Google Scholar] [CrossRef]
- Sun, G.; Ma, Z.; Yu, J. Discrete-Time Fractional Order Terminal Sliding Mode Tracking Control for Linear Motor. IEEE Trans. Ind. Electron. 2018, 65, 3386–3394. [Google Scholar] [CrossRef]
- Labbadi, M.; Boubaker, S.; Djemai, M.; Mekni, S.K.; Bekrar, A. Fixed-Time Fractional-Order Global Sliding Mode Control for Nonholonomic Mobile Robot Systems under External Disturbances. Fractal Fract. 2022, 6, 177. [Google Scholar] [CrossRef]
- Fang, Y.; Li, S.; Fei, J. Adaptive Intelligent High-Order Sliding Mode Fractional Order Control for Harmonic Suppression. Fractal Fract. 2022, 6, 482. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.; Ouyang, H.; Mei, L. An Adaptive Super Twisting Nonlinear Fractional Order PID Sliding Mode Control of Permanent Magnet Synchronous Motor Speed Regulation System Based on Extended State Observer. IEEE Access 2020, 8, 53498–53510. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, Q.; Sun, X.; Zhu, H.; Lu, C. Fractional-order sliding mode control for a bearingless induction motor based on improved load torque observer. J. Frankl. Inst. 2021, 358, 3701–3725. [Google Scholar] [CrossRef]
- Hou, Z.; Xiong, S. On Model-Free Adaptive Control and Its Stability Analysis. IEEE Trans. Autom. Control 2019, 64, 4555–4569. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, X.; Yu, H.; Yu, J. Model-free adaptive discrete-time integral terminal sliding mode control for PMSM drive system with disturbance observer. IET Electr. Power Appl. 2020, 14, 1756–1765. [Google Scholar] [CrossRef]
- Zhao, K.; Yin, T.; Zhang, C.; He, J.; Li, X.; Chen, Y.; Zhou, R.; Leng, A. Robust Model-Free Nonsingular Terminal Sliding Mode Control for PMSM Demagnetization Fault. IEEE Access 2019, 7, 15737–15748. [Google Scholar] [CrossRef]
- Kurniawan, E.; Harno, H.G.; Wang, H.; Prakosa, J.A.; Sirenden, B.H.; Septanto, H.; Adinanta, H.; Rahmatillah, A. Robust adaptive repetitive control for unknown linear systems with odd-harmonics periodic disturbances. Sci. China Inf. Sci. 2022, 1. [Google Scholar]
- Kurniawan, E.; Cao, Z.; Man, Z. Digital design of adaptive repetitive control of linear systems with time-varying periodic disturbances. IET Control Theory Appl. 2014, 8, 1995–2003. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, J.; Huang, L. Model-Free Predictive Current Control of PMSM Drives Based on Extended State Observer Using Ultralocal Model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Zhou, J.; Tian, D.; Sheng, Z.; Duan, X.; Qu, G.; Cao, D.; Shen, X. Decentralized Robust Control for Vehicle Platooning Subject to Uncertain Disturbances via Super-Twisting Second-Order Sliding-Mode Observer Technique. IEEE Trans. Veh. Technol. 2022, 71, 7186–7201. [Google Scholar] [CrossRef]
- Liu, X.; Yu, H. Continuous adaptive integral-type sliding mode control based on disturbance observer for PMSM drives. Nonlinear Dyn. 2021, 104, 1429–1441. [Google Scholar] [CrossRef]
- Jafarlou, F.; Peimani, M.; Lotfivand, N. Fractional order adaptive sliding-mode finite time control for cable-suspended parallel robots with unknown dynamics. Int. J. Dyn. Control 2022, 10, 1674–1684. [Google Scholar] [CrossRef]
- Aghababa, M.P. A Lyapunov-based control scheme for robust stabilization of fractional chaotic systems. Nonlinear Dyn. 2014, 78, 2129–2140. [Google Scholar] [CrossRef]
- Ullah, N.; Ali, M.A.; Ibeas, A.; Herrera, J. Adaptive Fractional Order Terminal Sliding Mode Control of a Doubly Fed Induction Generator-Based Wind Energy System. IEEE Access 2017, 5, 21368–21381. [Google Scholar] [CrossRef]
- Gu, G. Linear Feedback Control—Analysis and Design with MATLAB. IEEE Control Syst. Mag. 2009, 29, 128–129. [Google Scholar]
- Zhang, B.; Pi, Y.; Luo, Y. Fractional order sliding-mode control based on parameters auto-tuning for velocity control of permanent magnet synchronous motor. ISA Trans. 2012, 51, 649–656. [Google Scholar] [CrossRef]
- Long, B.; Lu, P.J.; Chong, K.T.; Rodriguez, J.; Guerrero, J.M. Robust Fuzzy-Fractional-Order Nonsingular Terminal Sliding-Mode Control of LCL-Type Grid-Connected Converters. IEEE Trans. Ind. Electron. 2022, 69, 5854–5866. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| rated power | 1.5 KW | |
| rated stator voltage | 220 V | |
| rated stator current | 5.9 A | |
| stator resistance | 0.96 Ω | |
| rotor resistance | 0.93 Ω | |
| stator inductance | 118.32 mH | |
| rotor inductance | 118.67 mH | |
| mutual inductance | 112.23 mH | |
| number of pole pairs | 2 | |
| moment of inertia | J | 0.0038 kg·m2 |
| Speed | Control Scheme | Root Mean Square Error |
|---|---|---|
| 300 rpm | MFIOSMC | 4.2948 |
| 300 rpm | MFFOSMC | 4.2795 |
| 500 rpm | MFIOSMC | 5.6966 |
| 500 rpm | MFFOSMC | 5.5471 |
| 800 rpm | MFIOSMC | 7.2379 |
| 800 rpm | MFFOSMC | 7.1444 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Liu, X. Model-Free Fractional-Order Sliding Mode Control of Electric Drive System Based on Nonlinear Disturbance Observer. Fractal Fract. 2022, 6, 603. https://doi.org/10.3390/fractalfract6100603
Yu Y, Liu X. Model-Free Fractional-Order Sliding Mode Control of Electric Drive System Based on Nonlinear Disturbance Observer. Fractal and Fractional. 2022; 6(10):603. https://doi.org/10.3390/fractalfract6100603
Chicago/Turabian StyleYu, Yingxin, and Xudong Liu. 2022. "Model-Free Fractional-Order Sliding Mode Control of Electric Drive System Based on Nonlinear Disturbance Observer" Fractal and Fractional 6, no. 10: 603. https://doi.org/10.3390/fractalfract6100603
APA StyleYu, Y., & Liu, X. (2022). Model-Free Fractional-Order Sliding Mode Control of Electric Drive System Based on Nonlinear Disturbance Observer. Fractal and Fractional, 6(10), 603. https://doi.org/10.3390/fractalfract6100603