
Modal Shifted Fifth-Kind Chebyshev Tau Integral Approach for Solving Heat Conduction Equation

 , , and
, , and
Abstract
:1. Introduction
- Deriving new theorems, corollaries, and lemmas concerned with the shifted that serve in the derivation of our proposed numerical scheme.
- Presenting a new spectral tau algorithm for the numerical treatment of the heat conduction equation.
- Investigating the convergence analysis of the proposed double-shifted Chebyshev expansion.
- Performing some comparisons to clarify the efficiency and accuracy of our method.
- By choosing the shifted as basis functions, and taking a few terms of the retained modes, it is possible to produce approximations with excellent precision. Less calculation is required. In addition, the resulting errors are small.
- In comparison to other Chebyshev polynomials, the shifted are not as well-studied or used. This motivates us to find theoretical findings concerning them. Furthermore, we found that the obtained numerical results, if they are used as basis functions, are satisfactory.
- Some derivatives and integral formulas of the shifted are given in reduced formulas that do not involve any hypergeometric forms.
- The employment of these basis functions to the numerical treatment of the heat conduction equation is new.
2. An Account on the Shifted and Some New Useful Formulas
2.1. An Account on the Shifted
2.2. Derivation of the Second-Order Derivative Formulas of
2.3. Derivation of Integral Formulas of
3. A Numerical Tau Approach for the Treatment of the Heat Conduction Equation
Treatment of the Equation Subject to Homogeneous Boundary Conditions
4. Convergence and Error Analysis
- The case in which the solution is separable.
- The case in which the solution is not separable.
4.1. The Case Where the Solution Is Separable
4.2. The Case Where the Solution Is Nonseparable
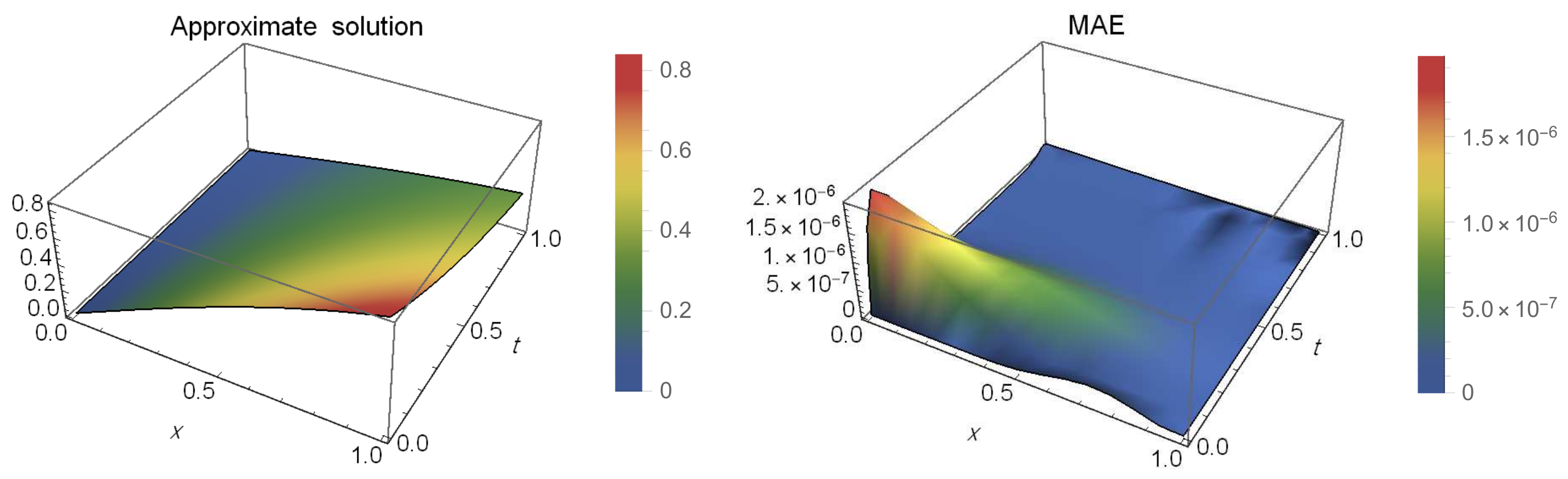
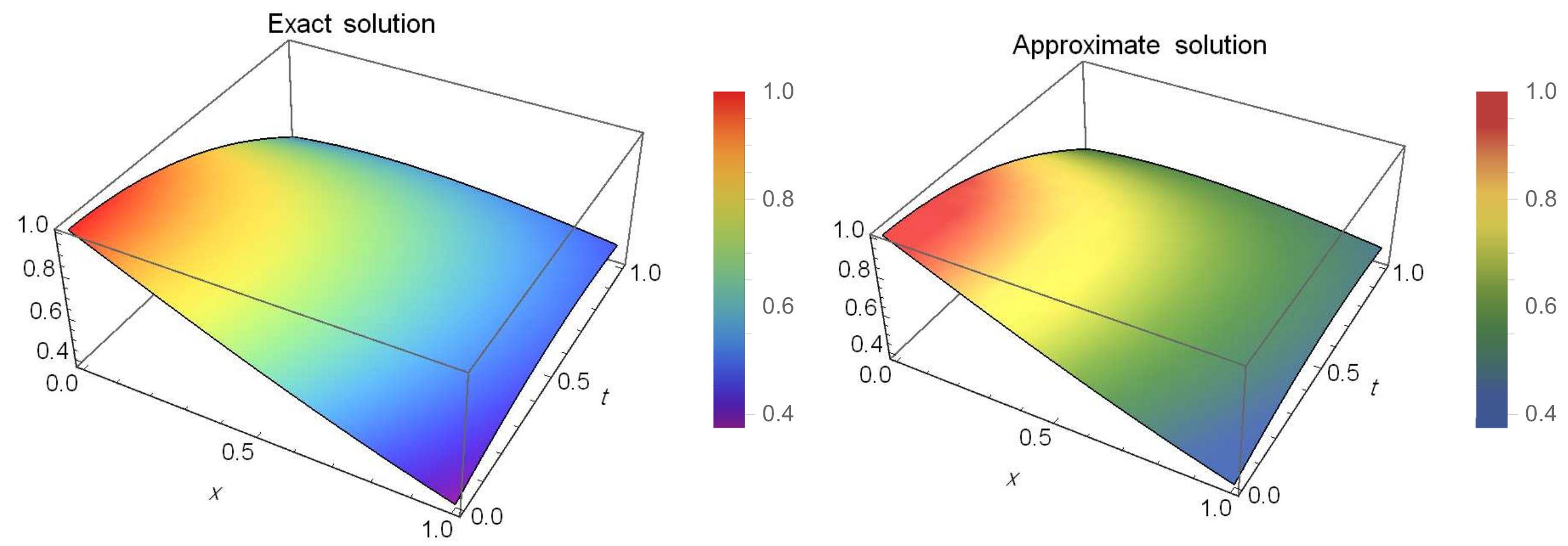
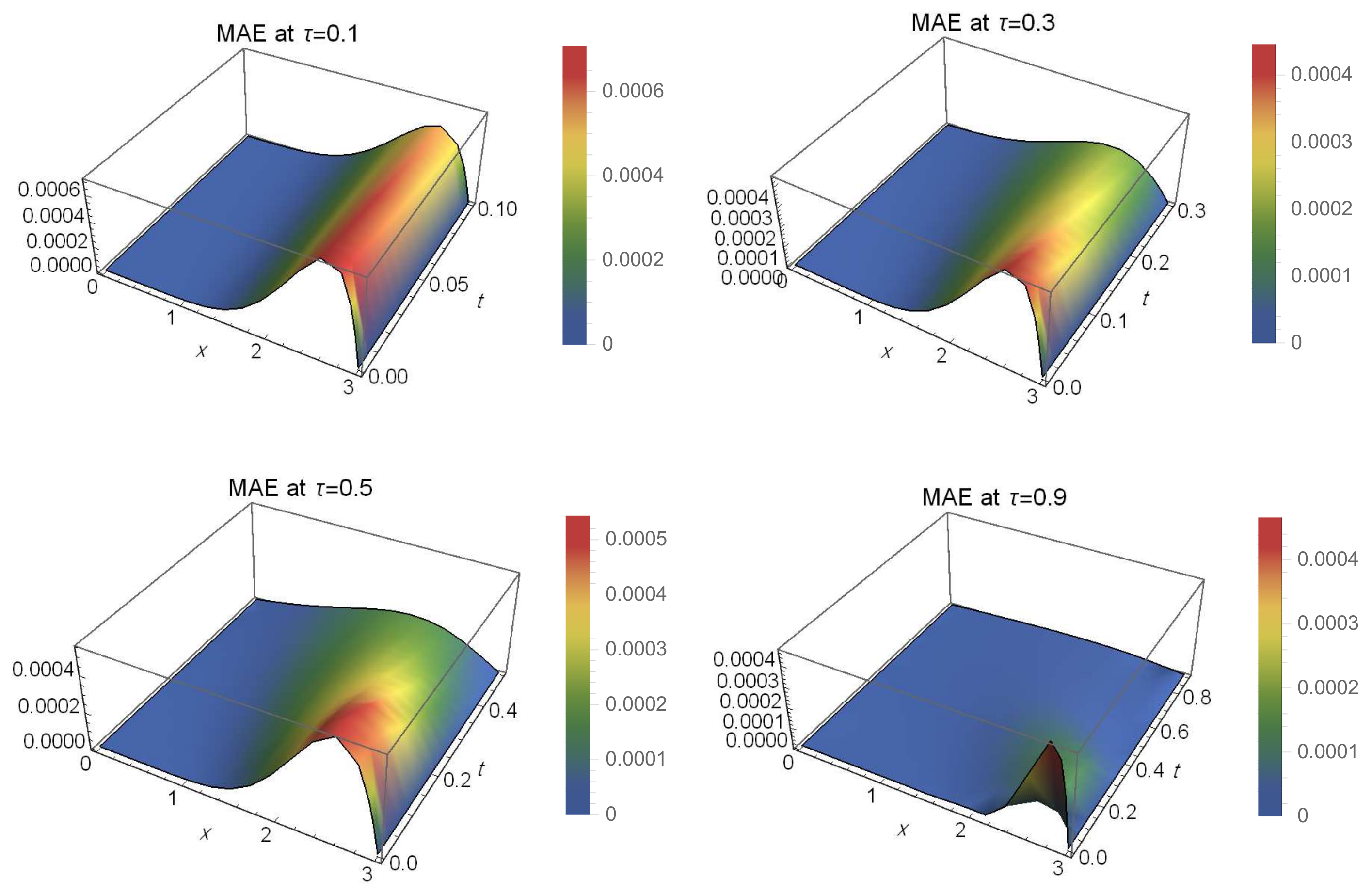
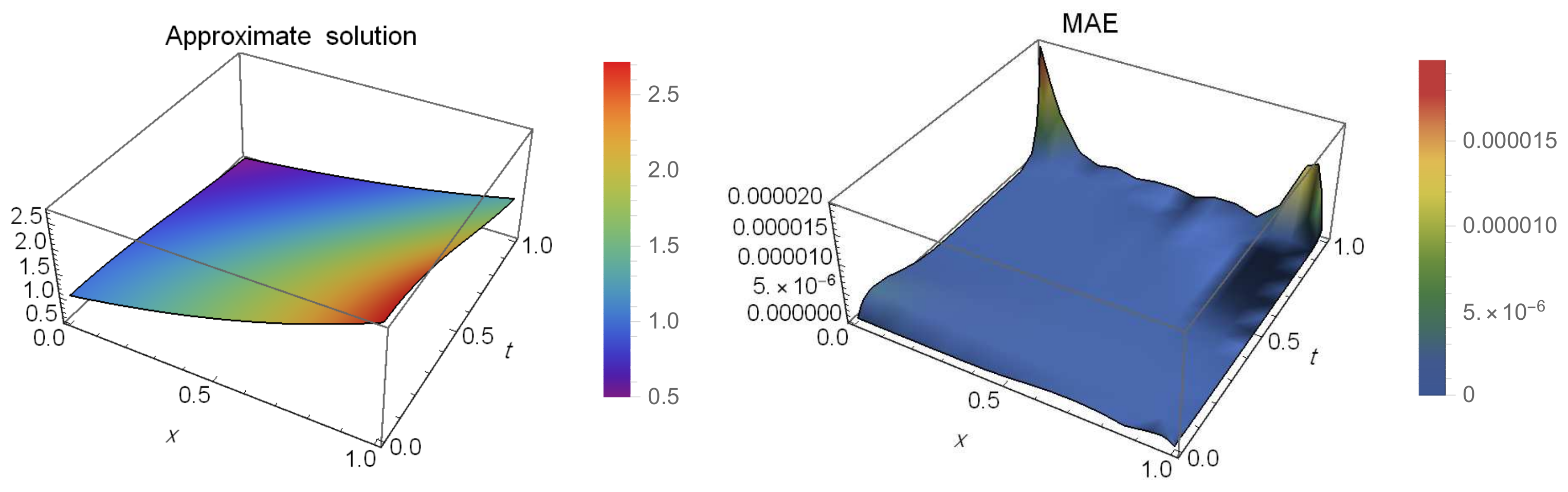
5. Illustrative Examples
6. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fourier, J. The Analytical Theory of Heat; The University Press: Oxford, UK, 1878. [Google Scholar]
- Narasimhan, T.N. Fourier’s heat conduction equation: History, influence, and connections. Rev. Geophys. 1999, 37, 151–172. [Google Scholar]
- Meyu, G.; Koriche, K. Analytical solution vs. numerical solution of heat equation flow through rod of length 8 units in one dimension. Int. J. Appl. Math. Theor. Phys. 2021, 7, 53. [Google Scholar] [CrossRef]
- Liu, C.S.; Chang, J.R. Solving a nonlinear heat equation with nonlocal boundary conditions by a method of nonlocal boundary shape functions. Numer. Heat Transf. Part B Fundam. 2021, 80, 1–13. [Google Scholar]
- Tassaddiq, A.; Yaseen, M.; Yousaf, A.; Srivastava, R. A cubic B-spline collocation method with new approximation for the numerical treatment of the heat equation with classical and non-classical boundary conditions. Phys. Scr. 2021, 96, 045212. [Google Scholar] [CrossRef]
- Dehghan, M.; Shirilord, A. The use of homotopy analysis method for solving generalized Sylvester matrix equation with applications. Eng. Comput. 2021, 38, 2699–2716. [Google Scholar] [CrossRef]
- Saratha, S.R.; Krishnan, G.S.S.; Bagyalakshmi, M. Analysis of a fractional epidemic model by fractional generalised homotopy analysis method using modified Riemann-Liouville derivative. Appl. Math. Model. 2021, 92, 525–545. [Google Scholar] [CrossRef]
- Gonzalez-Gaxiola, O.; Biswas, A.; Ekici, M.; Khan, S. Highly dispersive optical solitons with quadratic–cubic law of refractive index by the variational iteration method. J. Opt. 2021, 51, 29–36. [Google Scholar] [CrossRef]
- Doeva, O.; Masjedi, P.K.; Weaver, P.M. A semi-analytical approach based on the variational iteration method for static analysis of composite beams. Compos. Struct. 2021, 257, 113110. [Google Scholar]
- Noeiaghdam, S.; Sidorov, D.; Wazwaz, A.M.; Sidorov, N.; Sizikov, V. The Numerical Validation of the Adomian Decomposition Method for Solving Volterra Integral Equation with Discontinuous Kernels Using the CESTAC Method. Mathematics 2021, 9, 260. [Google Scholar] [CrossRef]
- Lu, T.T.; Zheng, W.Q. Adomian decomposition method for first order PDEs with unprescribed data. Alex. Eng. J. 2021, 60, 2563–2572. [Google Scholar]
- Li, P.W. Space–time generalized finite difference nonlinear model for solving unsteady Burgers’ equations. Appl. Math. Lett. 2021, 114, 106896. [Google Scholar]
- Bullo, T.; Duressa, G.F.; Degla, G. Accelerated fitted operator finite difference method for singularly perturbed parabolic reaction-diffusion problems. Comput. Meth. Diff. Eqs. 2021, 9, 886–898. [Google Scholar]
- Vargas, A.M. Finite difference method for solving fractional differential equations at irregular meshes. Math. Comput. Simul. 2022, 193, 204–216. [Google Scholar] [CrossRef]
- Gharibi, Z.; Dehghan, M. Convergence analysis of weak Galerkin flux-based mixed finite element method for solving singularly perturbed convection-diffusion-reaction problem. Appl. Numer. Math. 2021, 163, 303–316. [Google Scholar]
- Yu, B.; Hu, P.; Saputra, A.A.; Gu, Y. The scaled boundary finite element method based on the hybrid quadtree mesh for solving transient heat conduction problems. Appl. Math. Model. 2021, 89, 541–571. [Google Scholar] [CrossRef]
- Namala, S.; Uddin, R. Hybrid nodal integral/finite element method for time-dependent convection diffusion equation. J. Nuc. Eng. Radiat. Sci. 2022, 8, 021406. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, F.; Jiang, X.; Turner, I. Spectral method for the two-dimensional time distributed-order diffusion-wave equation on a semi-infinite domain. J. Comput. Appl. Math. 2022, 399, 113712. [Google Scholar]
- Atta, A.G.; Moatimid, G.M.; Youssri, Y.H. Generalized Fibonacci Operational tau Algorithm for Fractional Bagley-Torvik Equation. Prog. Fract. Differ. Appl. 2020, 6, 215–224. [Google Scholar]
- Tu, H.; Wang, Y.; Lan, Q.; Liu, W.; Xiao, W.; Ma, S. A Chebyshev-Tau spectral method for normal modes of underwater sound propagation with a layered marine environment. J. Sound Vib. 2021, 492, 115784. [Google Scholar] [CrossRef]
- Doha, E.H.; Abd-Elhameed, W.M. Accurate spectral solutions for the parabolic and elliptic partial differential equations by the ultraspherical tau method. J. Comput. Appl. Math. 2005, 181, 24–45. [Google Scholar] [CrossRef] [Green Version]
- Atta, A.G.; Moatimid, G.M.; Youssri, Y.H. Generalized Fibonacci operational collocation approach for fractional initial value problems. Int. J. Appl. Comput. Math. 2019, 5, 1–11. [Google Scholar] [CrossRef]
- Hesthaven, J.S.; Gottlieb, S.; Gottlieb, D. Spectral Methods for Time-Dependent Problems; Cambridge University Press: Cambridge, UK, 2007; Volume 21. [Google Scholar]
- Shizgal, B. Spectral Methods in Chemistry and Physics; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Costabile, F.; Napoli, A. A class of Birkhoff–Lagrange-collocation methods for high order boundary value problems. Appl. Numer. Math. 2017, 116, 129–140. [Google Scholar]
- Youssri, Y.H. Orthonormal Ultraspherical Operational Matrix Algorithm for Fractal–Fractional Riccati Equation with Generalized Caputo Derivative. Fractal Fract. 2021, 5, 100. [Google Scholar]
- Abd-Elhameed, W.M.; Youssri, Y.H. Explicit shifted second-kind Chebyshev spectral treatment for fractional Riccati differential equation. CMES Comput. Model. Eng. Sci. 2019, 121, 1029–1049. [Google Scholar]
- Atta, A.G.; Abd-Elhameed, W.M.; Moatimid, G.M.; Youssri, Y.H. Shifted fifth-kind Chebyshev Galerkin treatment for linear hyperbolic first-order partial differential equations. Appl. Numer. Math. 2021, 167, 237–256. [Google Scholar]
- Atta, A.G.; Abd-Elhameed, W.M.; Youssri, Y.H. Shifted fifth-kind Chebyshev polynomials Galerkin-based procedure for treating fractional diffusion-wave equation. Int. J. Mod. Phys. C 2022, 33, 2250102. [Google Scholar] [CrossRef]
- Khalil, H.; Khan, R.A. A new method based on Legendre polynomials for solutions of the fractional two-dimensional heat conduction equation. Comput. Math. Appl. 2014, 67, 1938–1953. [Google Scholar]
- Abbasbandy, S.; Kazem, S.; Alhuthali, M.S.; Alsulami, H.H. Application of the operational matrix of fractional-order Legendre functions for solving the time-fractional convection–diffusion equation. Appl. Math. Comput. 2015, 266, 31–40. [Google Scholar] [CrossRef]
- Abdelkawy, M.A.; Alyami, S.A. Legendre-Chebyshev spectral collocation method for two-dimensional nonlinear reaction-diffusion equation with Riesz space-fractional. Chaos Solitons Fractals 2021, 151, 111279. [Google Scholar]
- Atta, A.G.; Abd-Elhameed, W.M.; Moatimid, G.M.; Youssri, Y.H. Advanced shifted sixth-kind Chebyshev tau approach for solving linear one-dimensional hyperbolic telegraph type problem. Math. Sci. 2022. [Google Scholar] [CrossRef]
- Pourbabaee, M.; Saadatmandi, A. Collocation method based on Chebyshev polynomials for solving distributed order fractional differential equations. Comput. Meth. Differ. Eqs. 2021, 9, 858–873. [Google Scholar]
- Mohammadi, F.; Moradi, L.; Conte, D. Discrete Chebyshev polynomials for solving fractional variational problems. Stat. Optim. Inf. Comput. 2021, 9, 502–515. [Google Scholar] [CrossRef]
- Abbas, W.; Fathy, M.; Mostafa, M.; Hashem, A.M.A. Galerkin method for nonlinear Volterra-Fredholm integro-differential equations based on Chebyshev polynomials. Eng. Res. J. 2021, 170, 169–183. [Google Scholar]
- Panghal, S.; Kumar, M. Multilayer perceptron and Chebyshev polynomials-based functional link artificial neural network for solving differential equations. Int. J. Model. Simulat. Sci. Comput. 2021, 12, 2150011. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M. Novel expressions for the derivatives of sixth kind Chebyshev polynomials: Spectral solution of the non-linear one-dimensional Burgers’ Equation. Fractal Fract. 2021, 5, 53. [Google Scholar] [CrossRef]
- Doha, E.H.; Abd-Elhameed, W.M.; Bassuony, M.A. On the coefficients of differentiated expansions and derivatives of Chebyshev polynomials of the third and fourth kinds. Acta Math. Sci. 2015, 35, 326–338. [Google Scholar] [CrossRef]
- Doha, E.H.; Abd-Elhameed, W.M.; Bassuony, M.A. On using third and fourth kinds Chebyshev operational matrices for solving Lane-Emden type equations. Rom. J. Phys. 2015, 60, 281–292. [Google Scholar]
- Sadri, K.; Aminikhah, H. A new efficient algorithm based on fifth-kind Chebyshev polynomials for solving multi-term variable-order time-fractional diffusion-wave equation. Int. J. Comput. Math. 2021, 99, 966–992. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Youssri, Y.H. New formulas of the high-order derivatives of fifth-kind Chebyshev polynomials: Spectral solution of the convection–diffusion equation. Numer. Methods Partial. Differ. Equ. 2021. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Youssri, Y.H. Fifth-kind orthonormal Chebyshev polynomial solutions for fractional differential equations. Comput. Appl. Math. 2018, 37, 2897–2921. [Google Scholar] [CrossRef]
- Koepf, W. Hypergeometric Summation, 2nd ed.; Springer Universitext Series: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Li, J.; Cheng, Y. Linear barycentric rational collocation method for solving heat conduction equation. Numer. Methods Partial. Differ. Equ. 2021, 37, 533–545. [Google Scholar] [CrossRef]
- Merga, F.E.; Chemeda, H.M. Modified Crank-Nicolson scheme with Richardson extrapolation for one-dimensional heat equation. Iran. J. Sci. Technol. Trans. Sci. 2021, 45, 1725–1734. [Google Scholar] [CrossRef]
- Hamaidi, M.; Naji, A.; Charafi, A. Space–time localized radial basis function collocation method for solving parabolic and hyperbolic equations. Eng. Anal. Bound. Elem. 2016, 67, 152–163. [Google Scholar] [CrossRef]
- Ku, C.Y.; Liu, C.Y.; Xiao, J.E.; Chen, M.R. Solving backward heat conduction problems using a novel space–time radial polynomial basis function collocation method. Appl. Sci. 2020, 10, 3215. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x | ||||
|---|---|---|---|---|
| 0.1 | ||||
| 0.2 | ||||
| 0.3 | ||||
| 0.4 | ||||
| 0.5 | ||||
| 0.6 | ||||
| 0.7 | ||||
| 0.8 | ||||
| 0.9 |
| x | |||||
|---|---|---|---|---|---|
| 0.2 | 9.81704 | 2.42225 | 2.24868 | 5.37087 | 3.24886 |
| 0.4 | 1.61729 | 5.11161 | 4.67631 | 2.53555 | 1.11043 |
| 0.6 | 1.84251 | 8.30112 | 8.43864 | 8.92868 | 1.84493 |
| 0.8 | 1.26461 | 1.21323 | 1.14871 | 1.94866 | 4.31002 |
| 1 | 6.98793 | 1.66147 | 1.38598 | 2.11464 | 1.64701 |
| 1.2 | 4.82847 | 2.15759 | 1.54812 | 7.01591 | 3.46544 |
| 1.4 | 1.19936 | 2.66197 | 1.62211 | 1.39606 | 5.36674 |
| 1.6 | 2.29473 | 3.11052 | 1.59488 | 1.99516 | 6.71459 |
| 1.8 | 3.79811 | 3.41681 | 1.45906 | 2.18735 | 6.83315 |
| 2 | 5.64132 | 3.48161 | 1.21885 | 1.69924 | 5.15014 |
| 2.2 | 7.58846 | 3.21358 | 8.95812 | 3.90051 | 1.43644 |
| 2.4 | 9.14396 | 2.56621 | 5.33517 | 1.59222 | 3.82048 |
| 2.6 | 9.43725 | 1.59666 | 2.00103 | 3.57282 | 8.86543 |
| 2.8 | 7.08014 | 5.53469 | 1.32394 | 4.00638 | 9.89625 |
| N | 2 | 4 | 6 | 8 | 10 | 12 |
|---|---|---|---|---|---|---|
| Our method | |
| method in [47] |
| x | |||||
|---|---|---|---|---|---|
| 0.1 | |||||
| 0.2 | |||||
| 0.3 | |||||
| 0.4 | |||||
| 0.5 | |||||
| 0.6 | |||||
| 0.7 | |||||
| 0.8 | |||||
| 0.9 |
| x | ||||
|---|---|---|---|---|
| 0 | ||||
| 0.3 | ||||
| 0.6 | ||||
| 0.9 | ||||
| 1.2 | ||||
| 1.5 | ||||
| 1.8 | ||||
| 2.1 | ||||
| 2.4 | ||||
| 2.7 | ||||
| 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atta, A.G.; Abd-Elhameed, W.M.; Moatimid, G.M.; Youssri, Y.H. Modal Shifted Fifth-Kind Chebyshev Tau Integral Approach for Solving Heat Conduction Equation. Fractal Fract. 2022, 6, 619. https://doi.org/10.3390/fractalfract6110619
Atta AG, Abd-Elhameed WM, Moatimid GM, Youssri YH. Modal Shifted Fifth-Kind Chebyshev Tau Integral Approach for Solving Heat Conduction Equation. Fractal and Fractional. 2022; 6(11):619. https://doi.org/10.3390/fractalfract6110619
Chicago/Turabian StyleAtta, Ahmed Gamal, Waleed Mohamed Abd-Elhameed, Galal Mahrous Moatimid, and Youssri Hassan Youssri. 2022. "Modal Shifted Fifth-Kind Chebyshev Tau Integral Approach for Solving Heat Conduction Equation" Fractal and Fractional 6, no. 11: 619. https://doi.org/10.3390/fractalfract6110619
APA StyleAtta, A. G., Abd-Elhameed, W. M., Moatimid, G. M., & Youssri, Y. H. (2022). Modal Shifted Fifth-Kind Chebyshev Tau Integral Approach for Solving Heat Conduction Equation. Fractal and Fractional, 6(11), 619. https://doi.org/10.3390/fractalfract6110619