

Using a Fully Fractional Generalised Maxwell Model for Describing the Time Dependent Sinusoidal Creep of a Dielectric Elastomer Actuator



Abstract
:1. Introduction
2. Materials and Methods
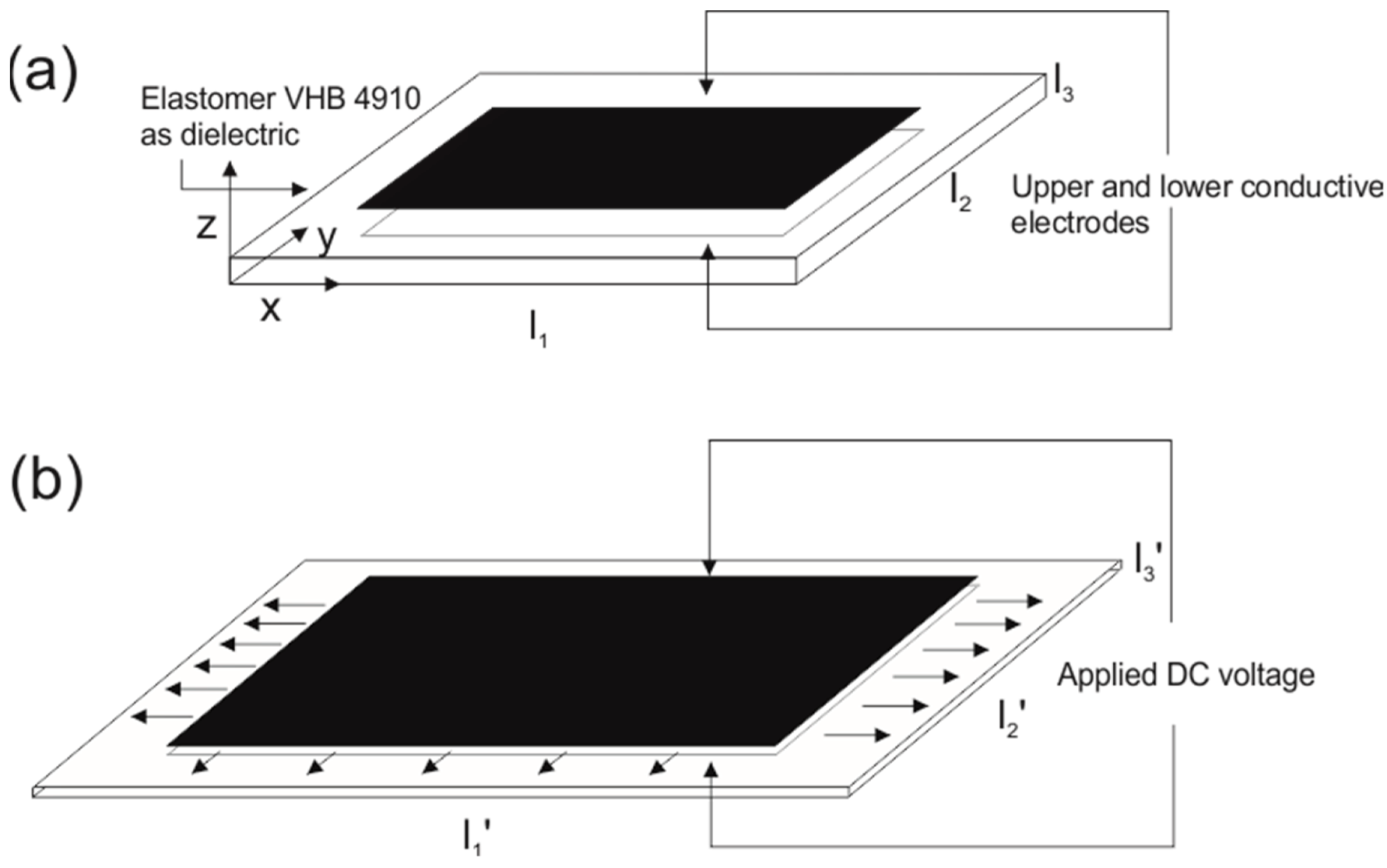
2.1. Principles of the DEA
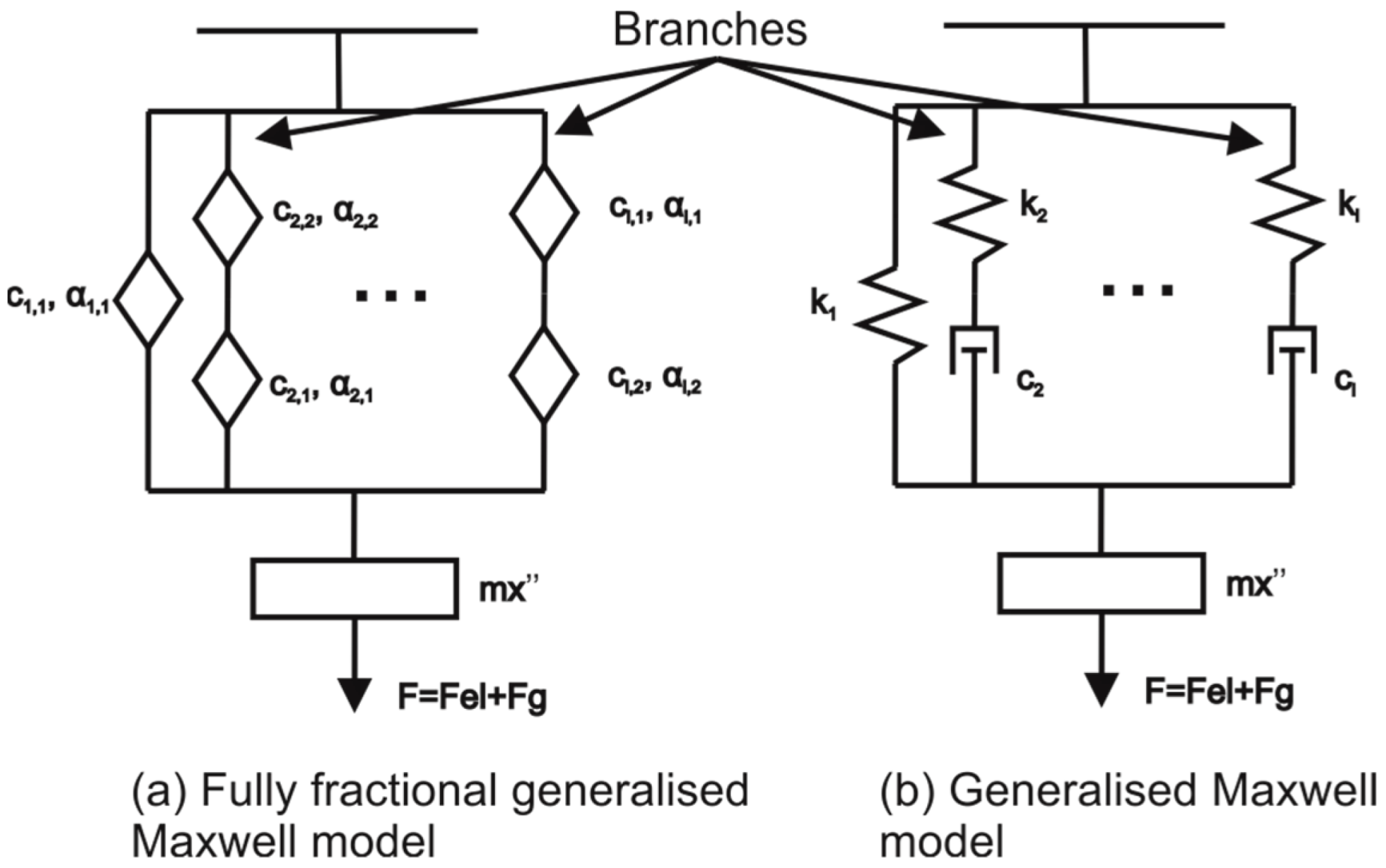
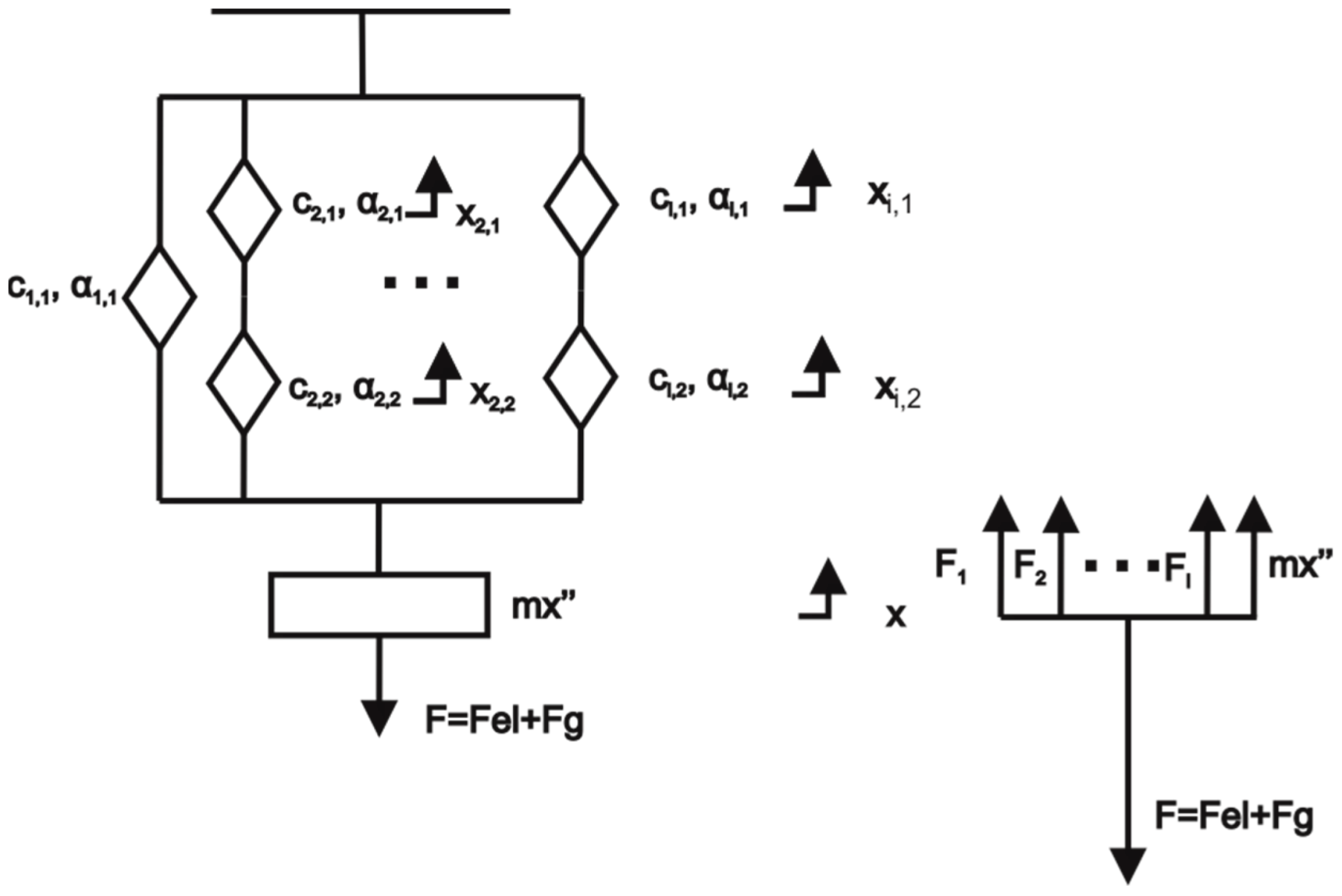
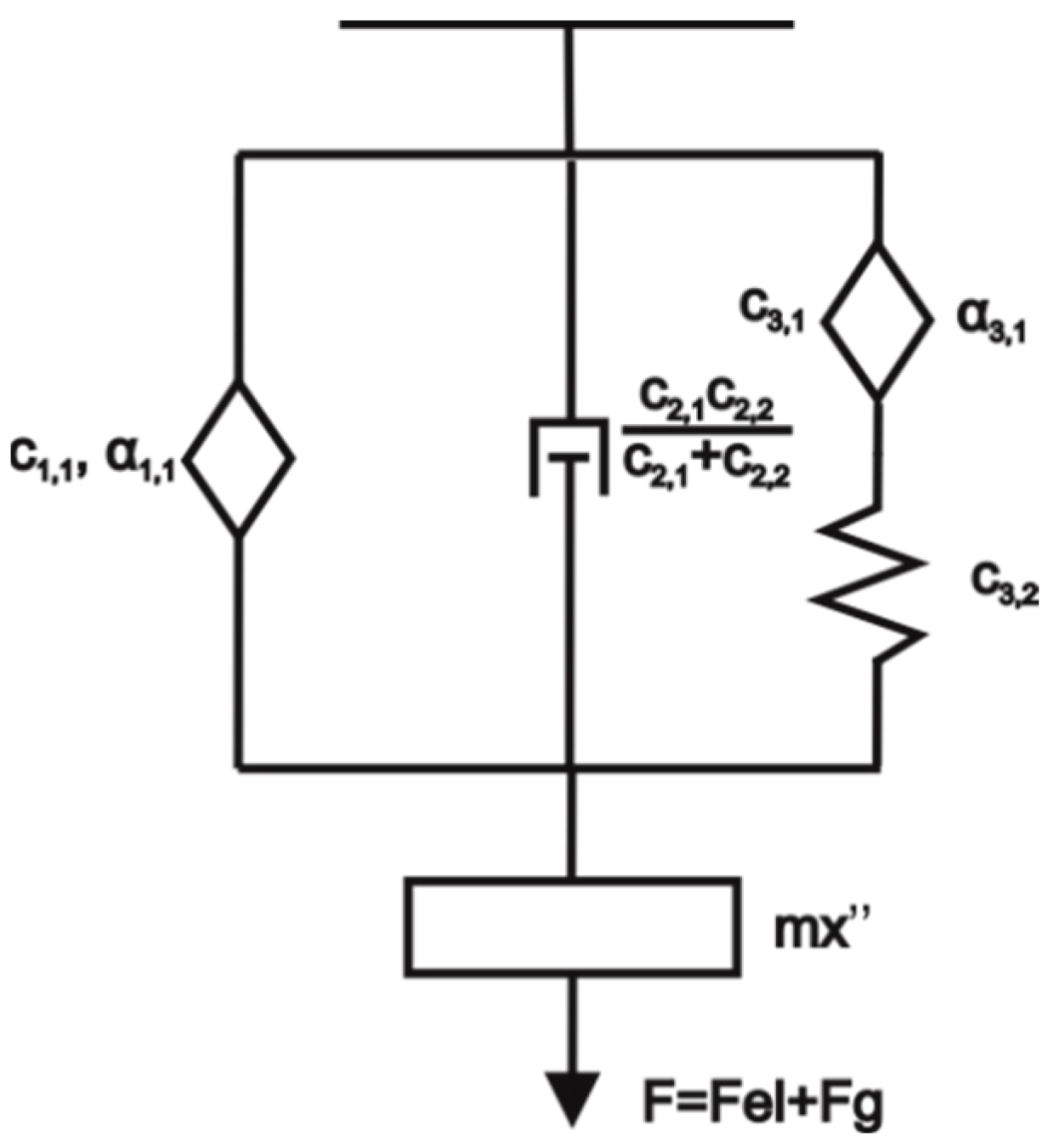
2.2. Derivation of the Fully Fractional Generalised Maxwell Model
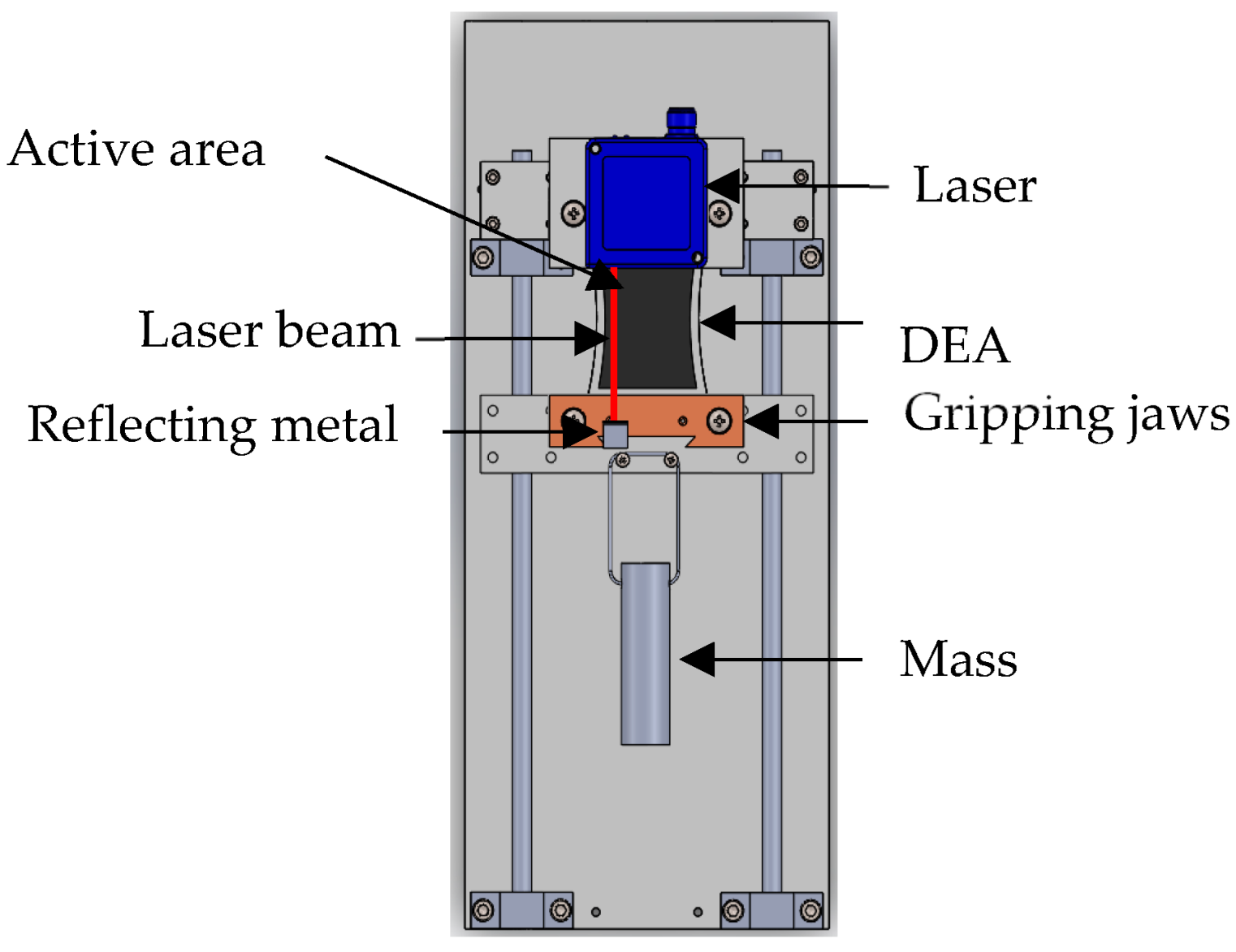
2.3. Experiments
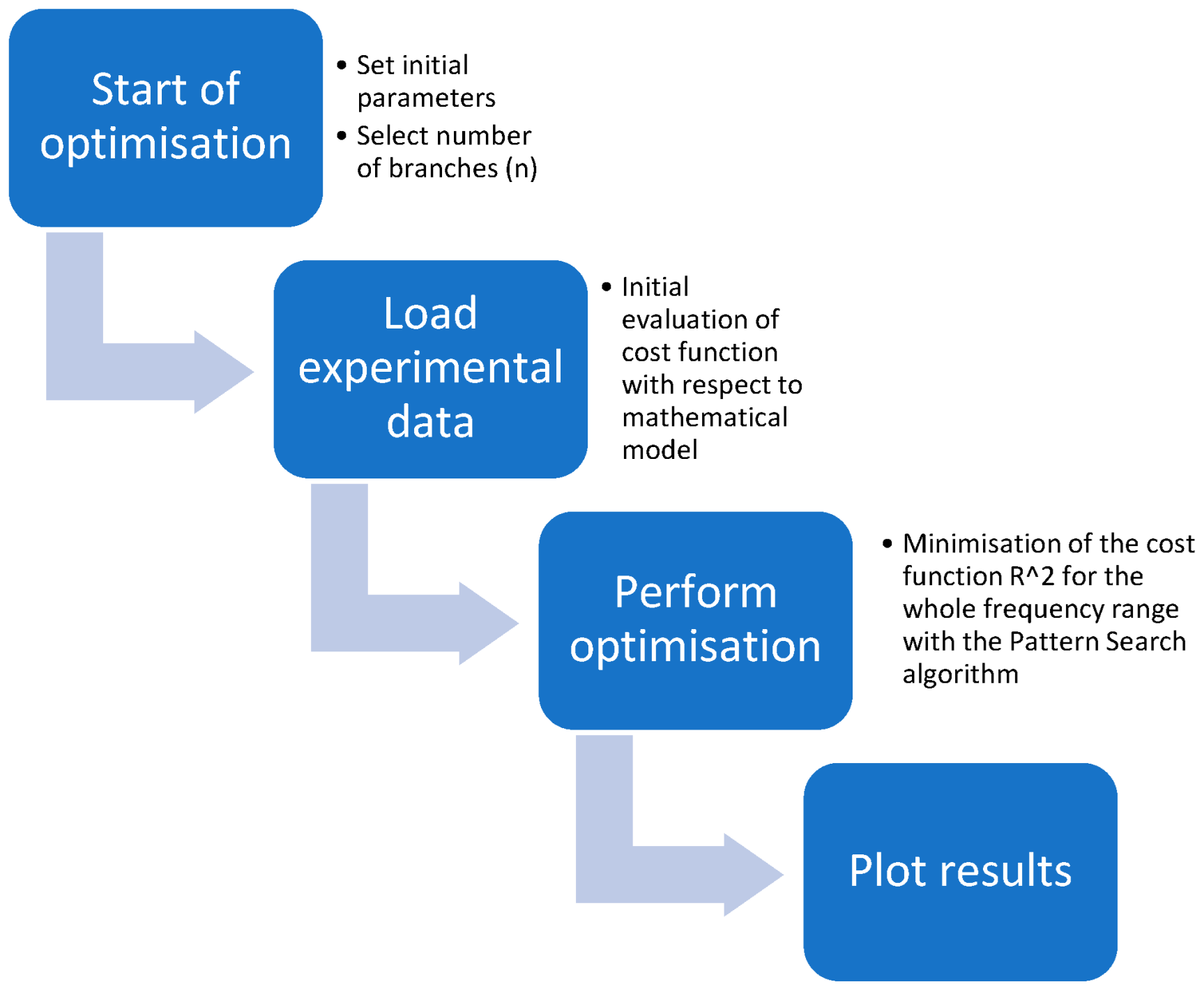
2.4. Optimisation
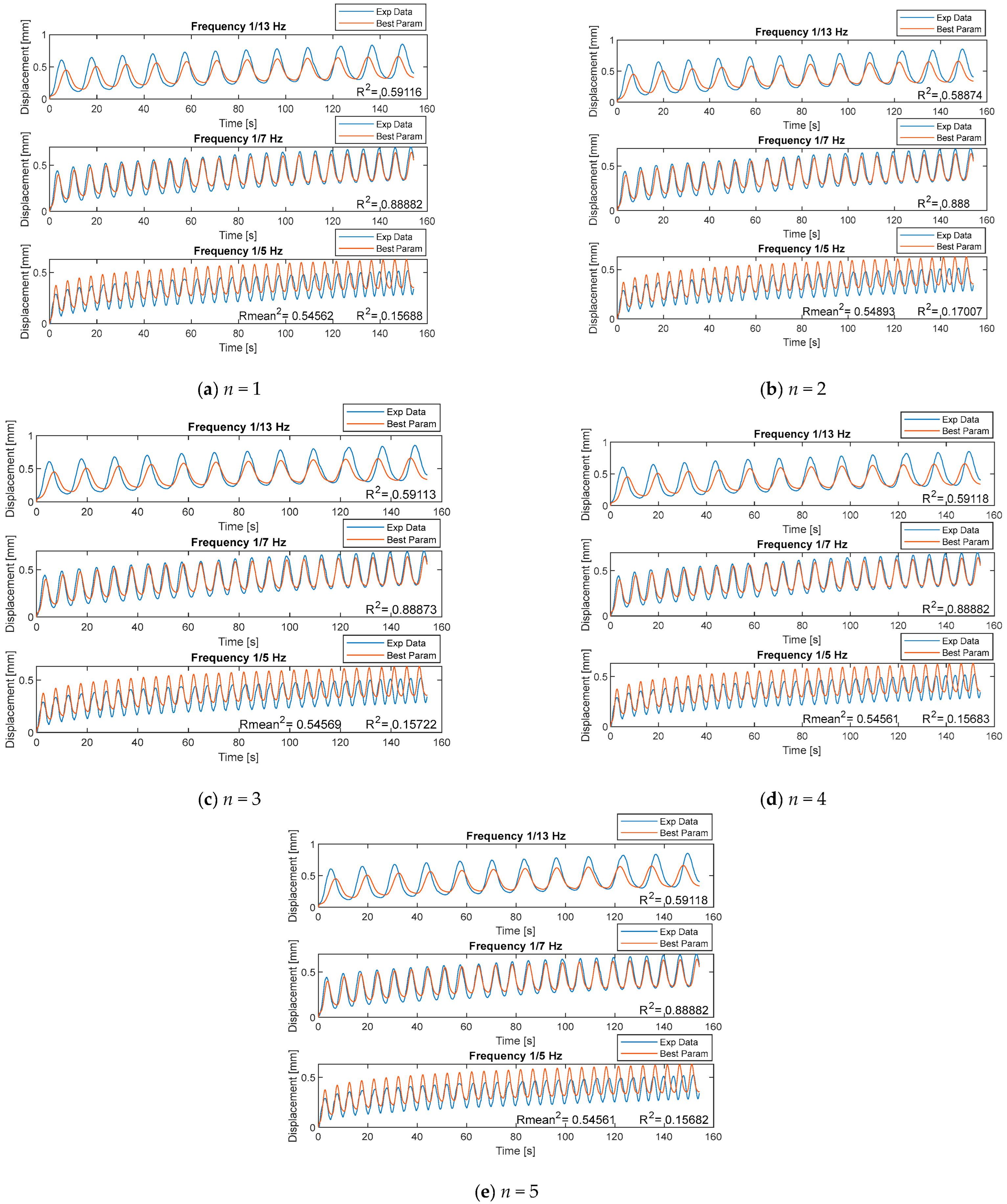
3. Results
4. Discussion
- The number of fully fractional Maxwell elements slightly affected the effectiveness of the model.
- Adding more than two branches did not increase the effectiveness of the model.
- The fully fractional Maxwell model was reduced to the model seen in Figure 8.
- The middle frequency of 1/7 Hz had the best agreement of 0.88 between data.
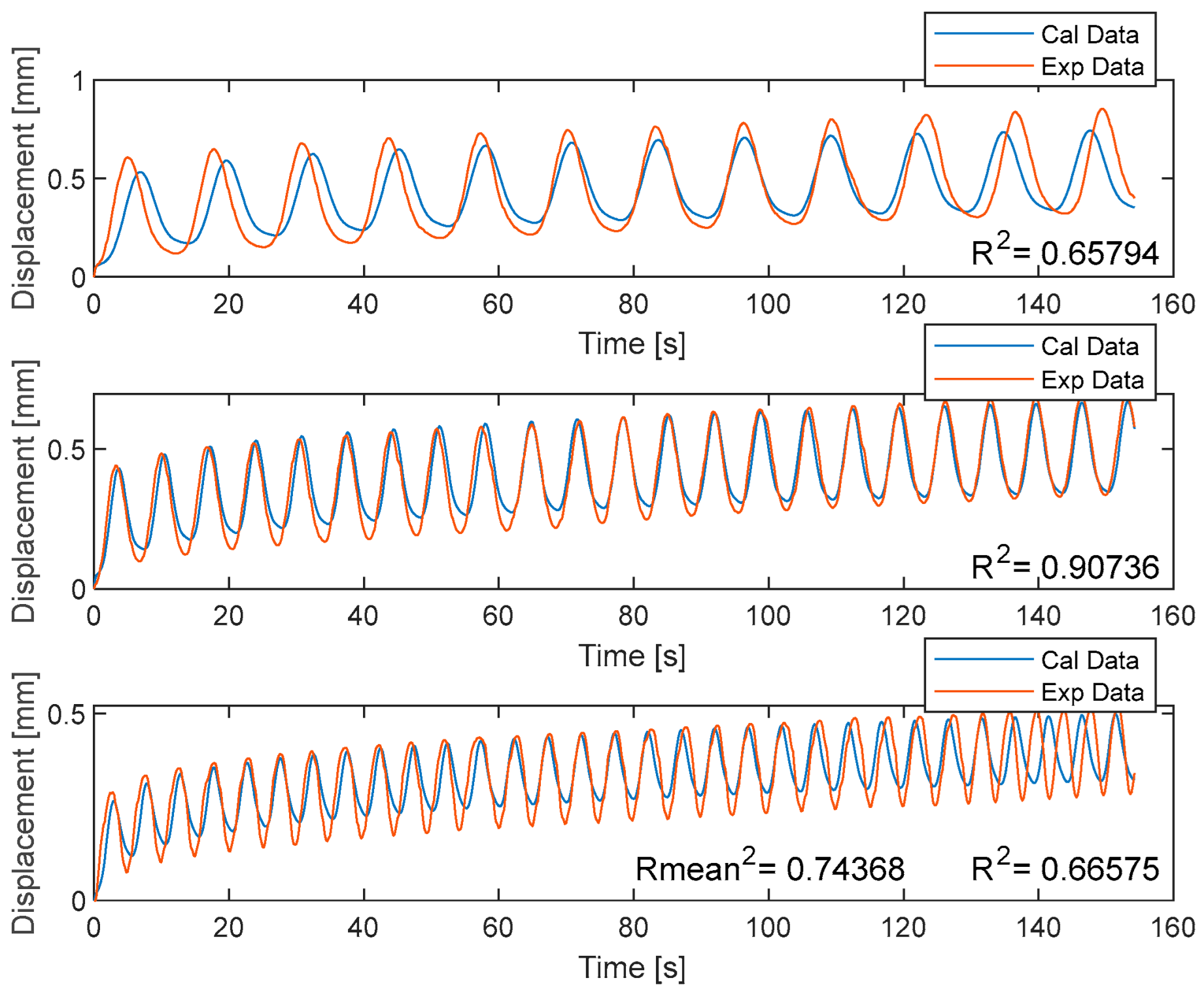
- Optimising each frequency individually drastically improved the overall agreement between data to 0.745.
- Optimising each frequency individually has a drawback since each frequency requires its own material parameters.
- Topology optimisation cannot be included into the Pattern Search algorithm.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Youn, J.-H.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K.-U. Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges. Appl. Sci. 2020, 10, 640. [Google Scholar] [CrossRef] [Green Version]
- Bar-Cohen, Y. Electroactive Polymer (EAP) Actuators as Artificial Muscles: Reality, Potential, and Challenges; SPIE Press: Bellingham, WA, USA, 2001. [Google Scholar]
- Pei, Q.; Rosenthal, M.; Stanford, S.; Prahlad, H.; Pelrine, R. Multiple-degrees-of-freedom electroelastomer roll actuators. Smart Mater. Struct. 2004, 13, N86–N92. [Google Scholar] [CrossRef]
- Carpi, F.; Migliore, A.; Serra, G.; De Rossi, D. Helical dielectric elastomer actuators. Smart Mater. Struct. 2005, 14, 1210–1216. [Google Scholar] [CrossRef] [Green Version]
- Rui, Z.; Patrick, L.; Andreas, K.; Gabor, M.K. Spring roll dielectric elastomer actuators for a portable force feedback glove. In Proceedings of Smart Structures and Materials 2006: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 26 February–2 March 2006. [Google Scholar]
- Rosset, S.; Shea, H.R. Flexible and stretchable electrodes for dielectric elastomer actuators. Appl. Phys. A 2013, 110, 281–307. [Google Scholar] [CrossRef] [Green Version]
- Suo, Z.; Zhao, X.; Greene, W.H. A nonlinear field theory of deformable dielectrics. J. Mech. Phys. Solids 2008, 56, 467–486. [Google Scholar] [CrossRef]
- Gu, G.G.; Zhu, J.; Zhu, L.; Zhu, X. Modeling of Viscoelastic Electromechanical Behavior in a Soft Dielectric Elastomer Actuator. IEEE Trans. Robot. 2017, 133, 1263–1271. [Google Scholar] [CrossRef]
- Zou, J.; Gu, G. Modeling the Viscoelastic Hysteresis of Dielectric Elastomer Actuators with a Modified Rate-Dependent Prandtl–Ishlinskii Model. Polymers 2018, 10, 525. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zou, J.; Gu, G. Dynamic modeling of dielectric elastomer actuators with a minimum energy structure. Smart Mater. Struct. 2019, 28, 085039. [Google Scholar] [CrossRef]
- Wissler, M.; Mazza, E. Mechanical behavior of an acrylic elastomer used in dielectric elastomer actuators. Sens. Actuators A Phys. 2007, 134, 494–504. [Google Scholar]
- Zhao, X.; Koh, S.; Suo, Z. Nonequilibrium Thermodynamics of Dielectric Elastomers. Int. J. Appl. Mech. 2011, 3, 203–217. [Google Scholar] [CrossRef]
- Xiang, G.; Yin, D.; Cao, C.; Gao, Y. Fractional description of creep behavior for fiber reinforced concrete: Simulation and parameter study. Constr. Build. Mater. 2022, 318, 126101. [Google Scholar] [CrossRef]
- Meng, R.; Yin, D.; Drapaca, C.S. Variable-order fractional description of compression deformation of amorphous glassy polymers. Comput. Mech. 2019, 64, 163–171. [Google Scholar] [CrossRef]
- Gao, Y.; Zhao, B.; Yin, D.; Yuan, L. A general fractional model of creep response for polymer materials: Simulation and model comparison. J. Appl. Polym. Sci. 2022, 139, 51577. [Google Scholar] [CrossRef]
- Su, X.; Chen, W.; Xu, W.; Liang, Y. Non-local structural derivative Maxwell model for characterizing ultra-slow rheology in concrete. Constr. Build. Mater. 2018, 190, 342–348. [Google Scholar]
- Xu, H.; Jiang, X. Creep constitutive models for viscoelastic materials based on fractional derivatives. Comput. Math. Appl. 2017, 73, 1377–1384. [Google Scholar] [CrossRef]
- Barretta, R.; Marotti de Sciarra, F.; Pinnola, F.P.; Vaccaro, M.S. On the nonlocal bending problem with fractional hereditariness. Meccanica 2022, 57, 807–820. [Google Scholar] [CrossRef]
- Luo, D.; Chen, H.-S. A new generalized fractional Maxwell model of dielectric relaxation. Chin. J. Phys. 2017, 55, 1998–2004. [Google Scholar] [CrossRef]
- 3M™. 3M™ VHB™ Tape Speciality Tapes. Available online: https://multimedia.3m.com/mws/media/986695O/3m-vhb-tape-specialty-tapes.pdf (accessed on 12 January 2021).
- Conductive, B. Electric Paint. Available online: https://www.bareconductive.com/shop/electric-paint-50ml/ (accessed on 11 July 2020).
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier Science: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Mainardi, F. Fractional Calculus and Waves in Linear Viscoelasticity: An Introduction to Mathematical Models; Imperial College Press: London, UK, 2010; pp. 51–63. [Google Scholar]
- Mainardi, F.; Spada, G. Creep, relaxation and viscosity properties for basic fractional models in rheology. Eur. Phys. J. Spec. Top. 2011, 193, 133–160. [Google Scholar] [CrossRef]
- FOMCON. FOMCON Toolbox for Matlab. Available online: http://fomcon.net/ (accessed on 10 December 2020).
- Wenglor. YP05MGV80. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=2ahUKEwihnaWa0bbjAhXiB50JHWepBx0QFjAAegQIBhAC&url=http%3A%2F%2Fwww.shintron.com.tw%2Fproimages%2Ftakex%2Fwenglor%2FYP05MGV80.pdf&usg=AOvVaw0hZdH3GNiqDLpm9BclkSVw (accessed on 15 July 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Unit | Meaning |
|---|---|---|
| Area. | ||
| / | Order or fractional derivation of the springpots. | |
| Time limits of the fractional derivation. | ||
| Material properties of the springpots. | ||
| Modul of elasticity. | ||
| Absolute permittivity. | ||
| / | Relative permittivity. | |
| 1 | Strain. | |
| Maxwell force. | ||
| Electrical force. | ||
| Force in individual branch. | ||
| Calculated data. | ||
| / | Current number of fractional Maxwell element. | |
| Spring constant. | ||
| Dimensions of the DEA. | ||
| Initial length. | ||
| Displacement. | ||
| / | Integer order of derivation by the definition. | |
| Mass of weight. | ||
| / | Number of fractional Maxwell elements. | |
| Viscosity. | ||
| / | Fractional order of derivation by the definition. | |
| / | Coefficient of determination. | |
| / | Mean value of coefficient of determination. | |
| / | Laplace operator. | |
| / | Total sum of squares. | |
| / | Residual sum of squares. | |
| Stress. | ||
| Voltage. | ||
| Displacement of individual branch. | ||
| Measured data. | ||
| Averaged measured data. |
| Fully Fractional Generalised Maxwell Model Number of Branches | |
|---|---|
| n= 1 | 0.5456 |
| n= 2 | 0.5489 |
| n = 3 | 0.5456 |
| n = 4 | 0.5456 |
| n = 5 | 0.5456 |
| Param. | n= 1 | |||||||||||
| Initial | 0.2 | 1 | 1 | |||||||||
| Optimised | 0.2 | 0.002 | 1 | |||||||||
| Parameters | ||||||||||||
| Initial | 500 | 500 | 500 | |||||||||
| Optimised | 62.952 | 0.036 | 0.142 | |||||||||
| Param. | n= 2 | |||||||||||
| Initial | 0.2 | 1 | 1 | 1 | 1 | |||||||
| Optimised | 0.2 | 1 | 1 | 0.523 | 0.046 | |||||||
| Param. | ||||||||||||
| Initial | 500 | 500 | 500 | 500 | 500 | |||||||
| Optimised | 62.740 | 47.958 | 173.21 | 430.381 | 0.215 | |||||||
| Param. | n= 3 | |||||||||||
| Initial | 0.2 | 1 | 1 | 1 | 1 | 1 | 1 | |||||
| Optimised | 0.2 | 1 | 1 | 1 | 0.002 | 1 | 1 | |||||
| Param. | ||||||||||||
| Initial | 500 | 500 | 500 | 500 | 500 | 500 | 500 | |||||
| Optimised | 62.950 | 0.267 | 0.464 | 0.140 | 0.088 | 0.036 | 0.237 | |||||
| Param. | n= 4 | |||||||||||
| Initial | 0.2 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |||
| Optimised | 0.2 | 0.002 | 1 | 0.002 | 1 | 1 | 0.002 | 1 | 0.002 | |||
| Param. | ||||||||||||
| Initial | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | |||
| Optimised | 62.950 | 0.103 | 0.036 | 0.321 | 0.036 | 0.094 | 0.157 | 0.036 | 0.225 | |||
| Param. | n= 5 | |||||||||||
| Initial | 0.2 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |
| Optimised | 0.2 | 0.002 | 1 | 1 | 1 | 1 | 0.002 | 1 | 0.002 | 1 | 1 | |
| Param. | ||||||||||||
| Initial | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | |
| Optimised | 62.950 | 0.097 | 0.315 | 0.036 | 0.356 | 0.036 | 0.097 | 0.036 | 0.095 | 0.036 | 0.285 |
| Parameters | F = 1/13 Hz n = 3 | ||||||||
| Initial | 0.2 | 1 | 1 | 1 | 1 | ||||
| Optimised | 0.1795 | 1 | 1 | 1 | 1 | ||||
| Parameters | |||||||||
| Initial | 500 | 500 | 500 | 500 | 500 | 0.658 | |||
| Optimised | 51.773 | 0.002 | 0.002 | 0.002 | 0.002 | ||||
| Parameters | F = 1/7 Hz n = 3 | ||||||||
| Initial | 0.2 | 1 | 1 | 1 | 1 | ||||
| Optimised | 0.188 | 0.255 | 0.046 | 0.225 | 0.880 | ||||
| Parameters | |||||||||
| Initial | 500 | 500 | 500 | 500 | 500 | 0.907 | |||
| Optimised | 57.696 | 569.346 | 0.003 | 406.744 | 0.479 | ||||
| Parameters | F = 1/5 Hz n = 3 | ||||||||
| Initial | 0.2 | 1 | 1 | 1 | 1 | ||||
| Optimised | 0.2 | 1 | 1 | 1 | 0.002 | ||||
| Parameters | |||||||||
| Initial | 500 | 500 | 500 | 500 | 500 | 0.665 | |||
| Optimised | 73.133 | 19.199 | 188.074 | 305.285 | 191.367 | ||||
| 0.743 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karner, T.; Belšak, R.; Gotlih, J. Using a Fully Fractional Generalised Maxwell Model for Describing the Time Dependent Sinusoidal Creep of a Dielectric Elastomer Actuator. Fractal Fract. 2022, 6, 720. https://doi.org/10.3390/fractalfract6120720
Karner T, Belšak R, Gotlih J. Using a Fully Fractional Generalised Maxwell Model for Describing the Time Dependent Sinusoidal Creep of a Dielectric Elastomer Actuator. Fractal and Fractional. 2022; 6(12):720. https://doi.org/10.3390/fractalfract6120720
Chicago/Turabian StyleKarner, Timi, Rok Belšak, and Janez Gotlih. 2022. "Using a Fully Fractional Generalised Maxwell Model for Describing the Time Dependent Sinusoidal Creep of a Dielectric Elastomer Actuator" Fractal and Fractional 6, no. 12: 720. https://doi.org/10.3390/fractalfract6120720
APA StyleKarner, T., Belšak, R., & Gotlih, J. (2022). Using a Fully Fractional Generalised Maxwell Model for Describing the Time Dependent Sinusoidal Creep of a Dielectric Elastomer Actuator. Fractal and Fractional, 6(12), 720. https://doi.org/10.3390/fractalfract6120720