


A Robust Controller of a Reactor Electromicrobial System Based on a Structured Fractional Transformation for Renewable Energy

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Mathematical Modeling
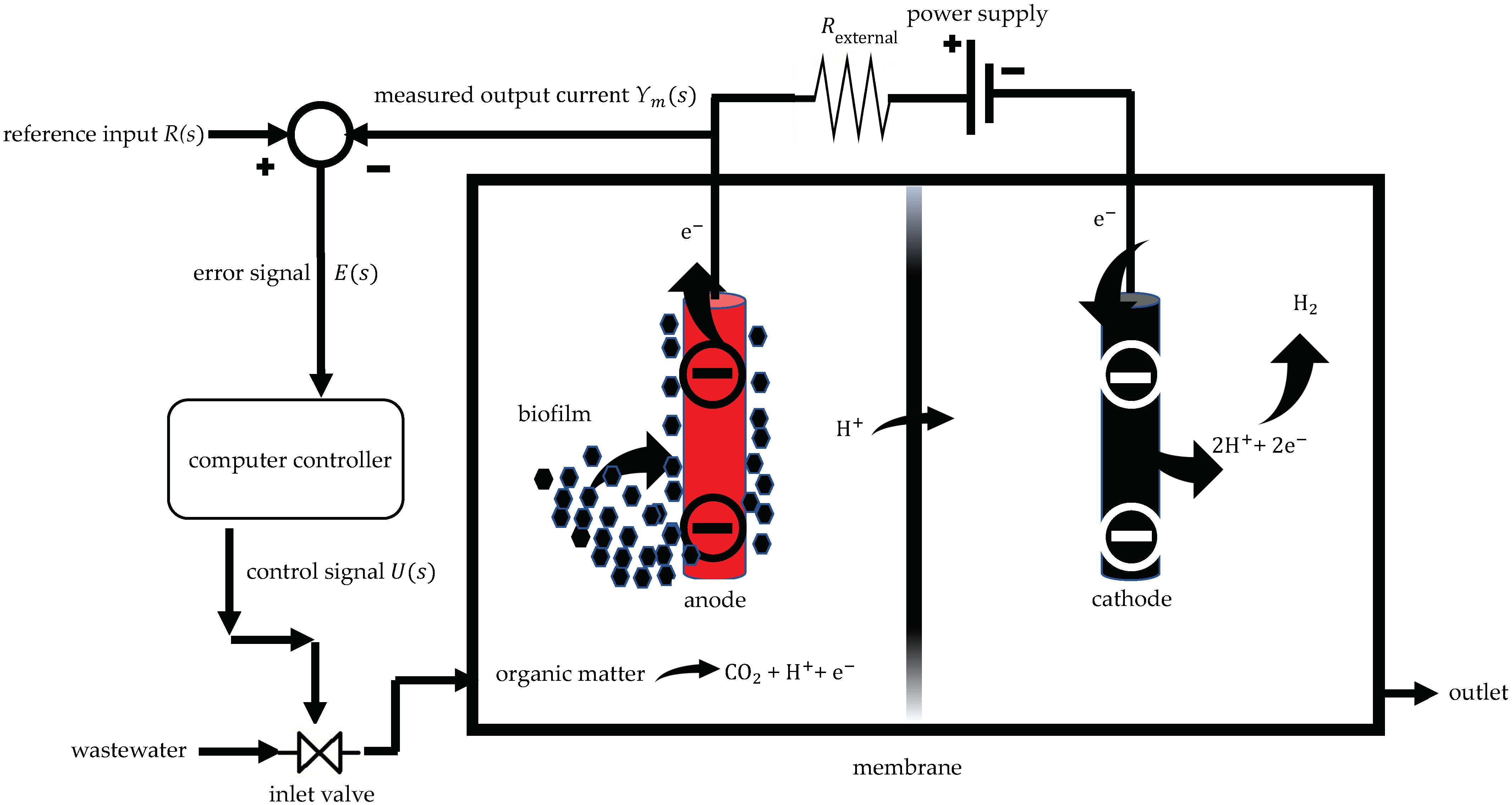
2.1. Description of a Continuous MEC Process
- (i)
- Acetolactic methanogenic;
- (ii)
- Anodophilic microorganisms.
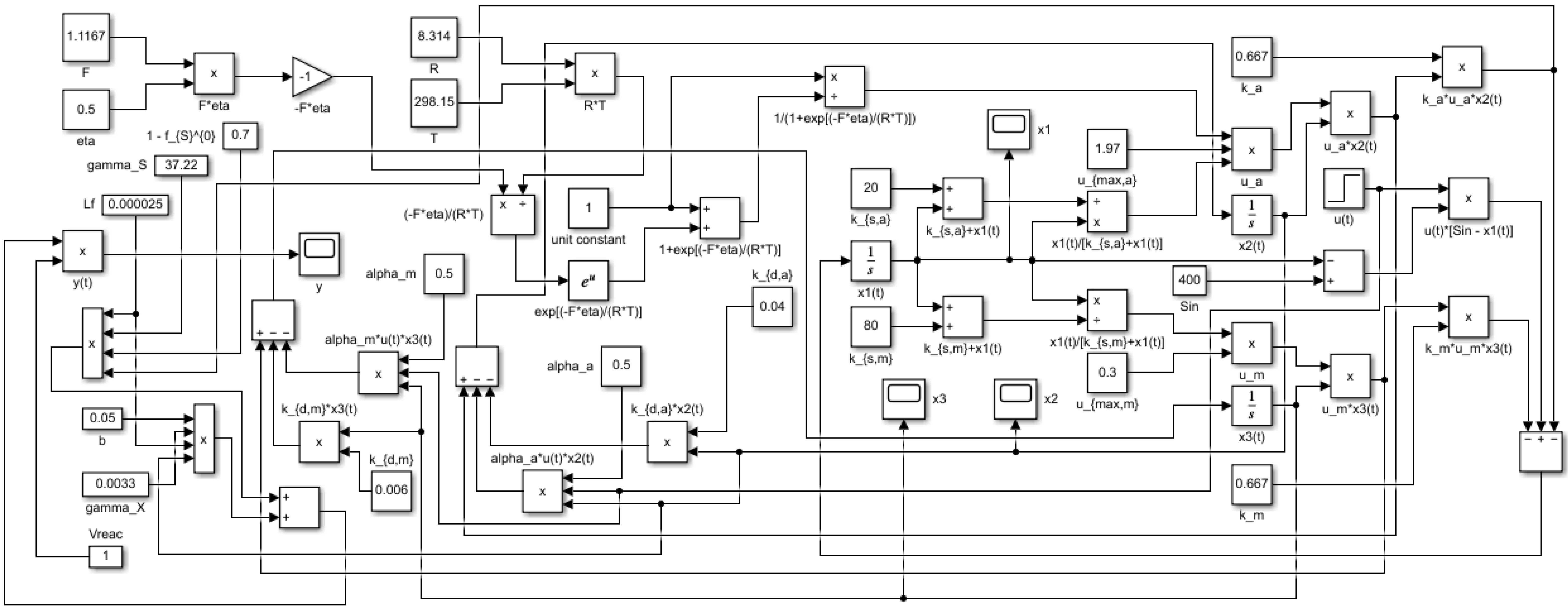
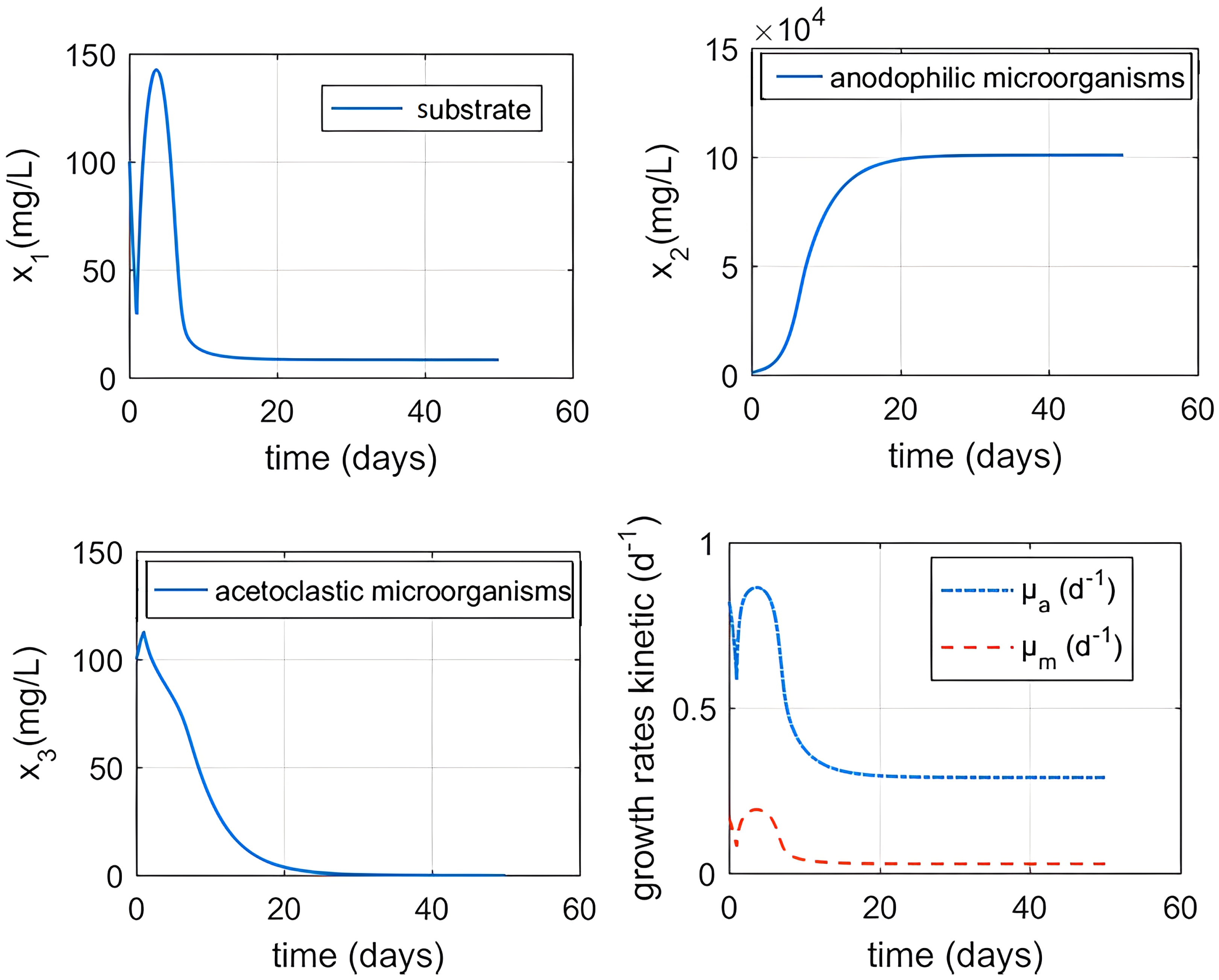
2.2. State-Space Model
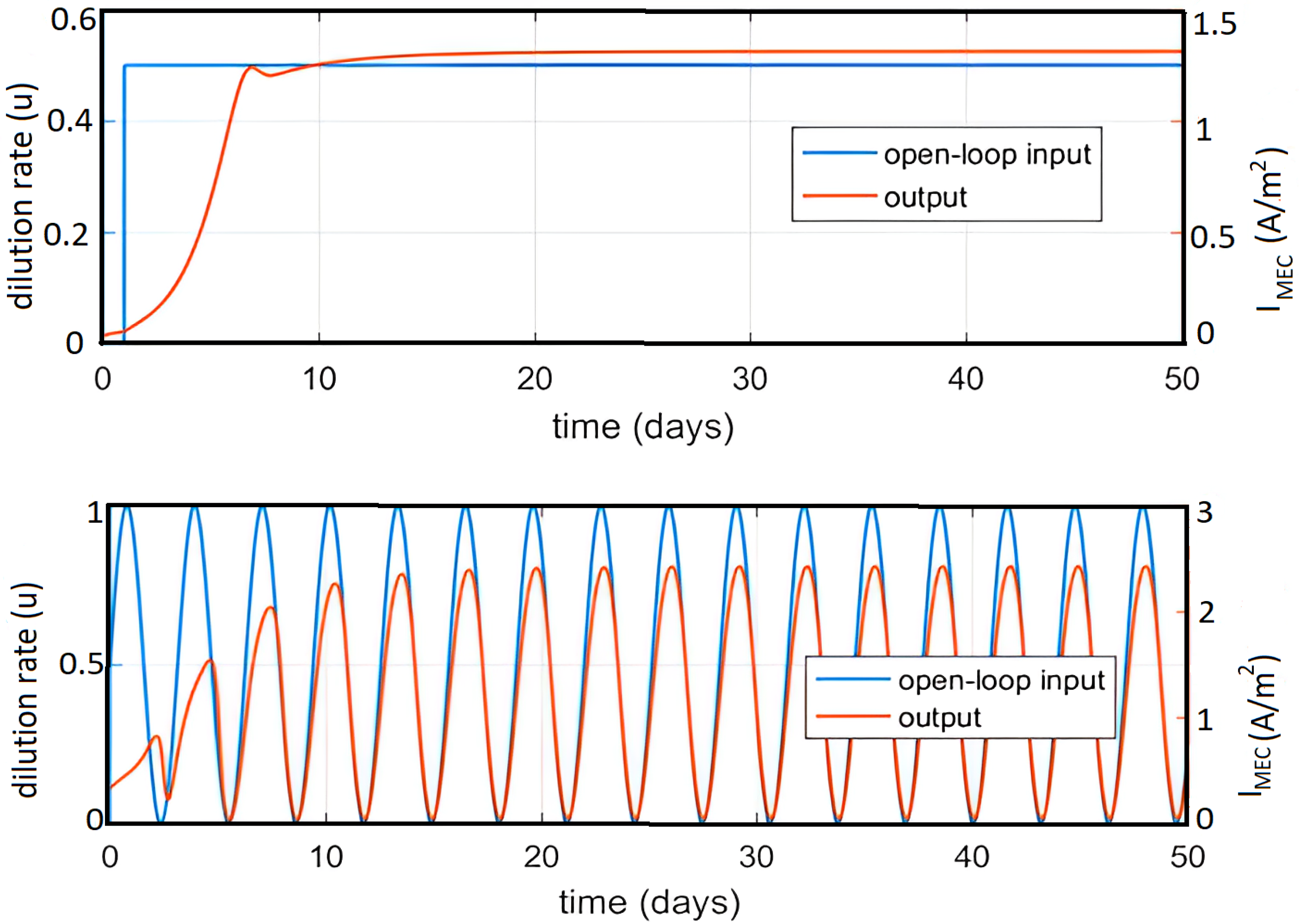
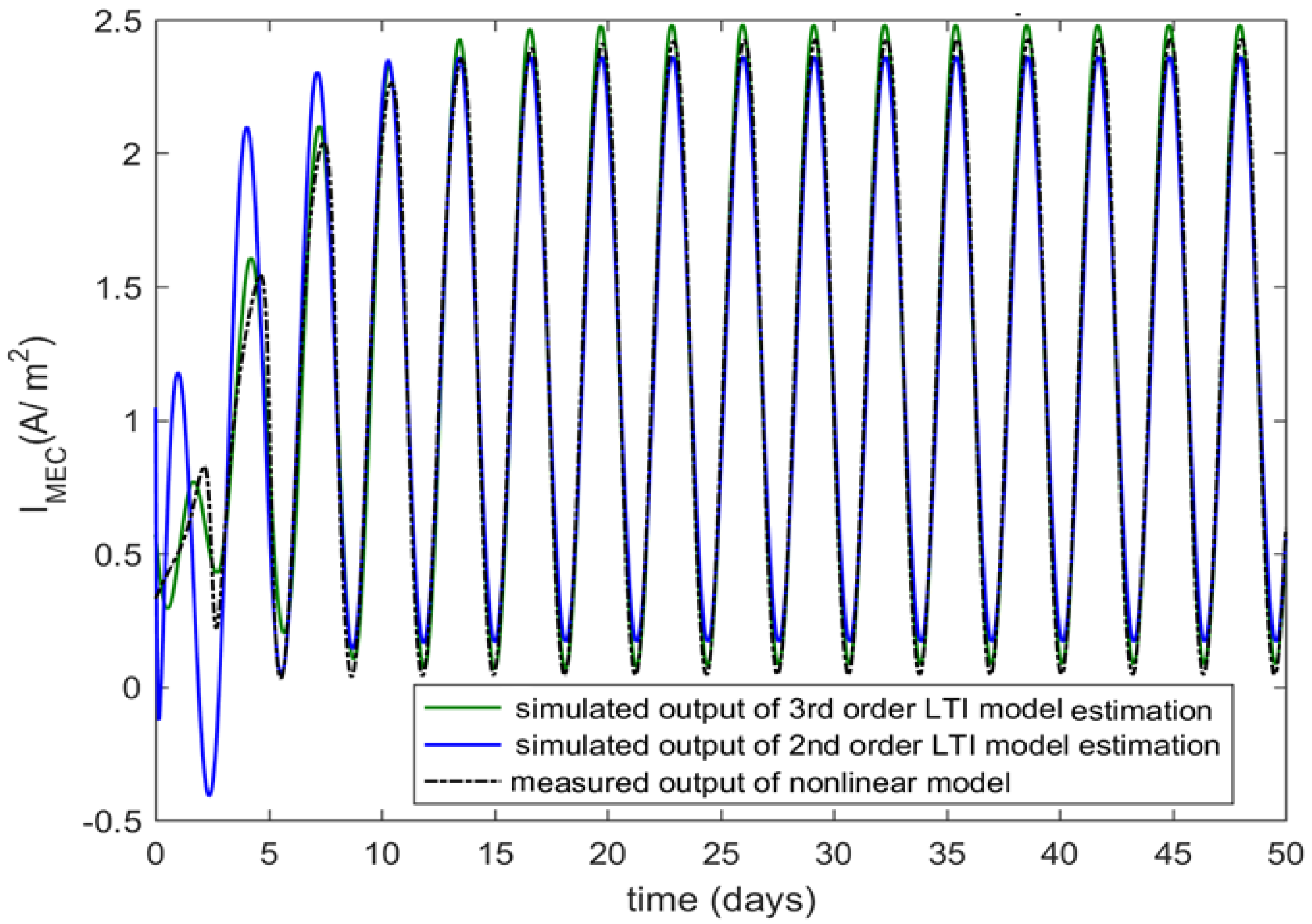
2.3. LTI Model Estimation for a Continuous MEC Reactor Process
3. Design of Controllers for a Continuous MEC System
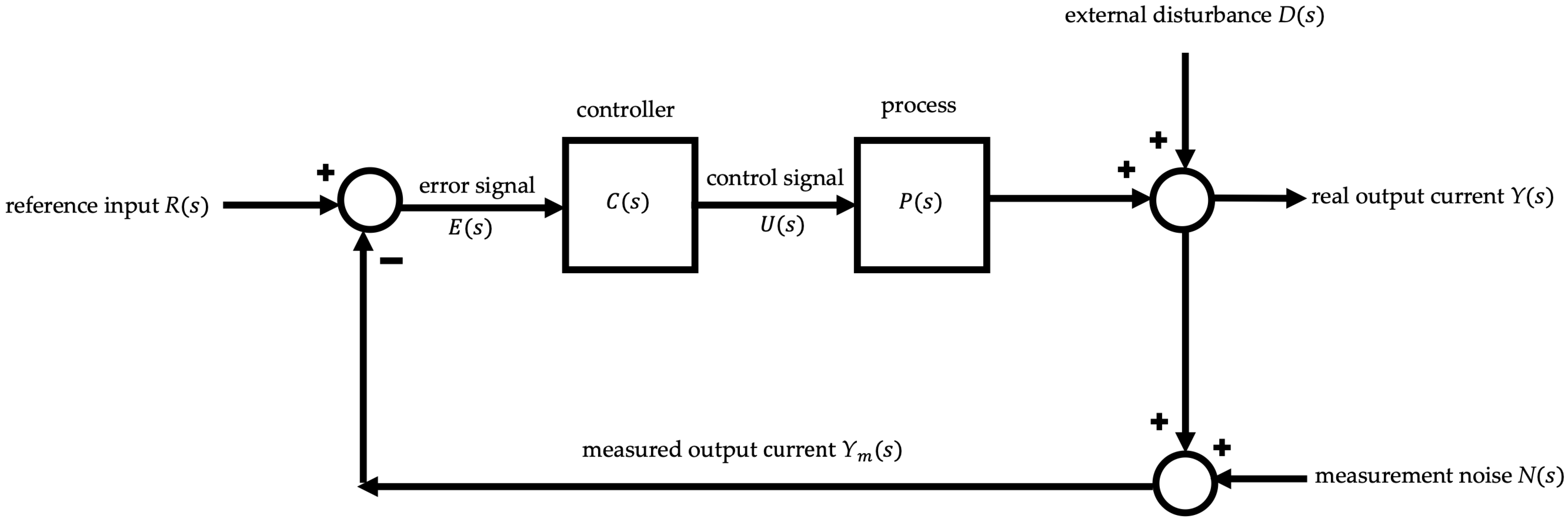
3.1. Statement of the Problem
3.2. Conventional Design of a PID Controller
3.3. Design of a Conventional H Synthesis
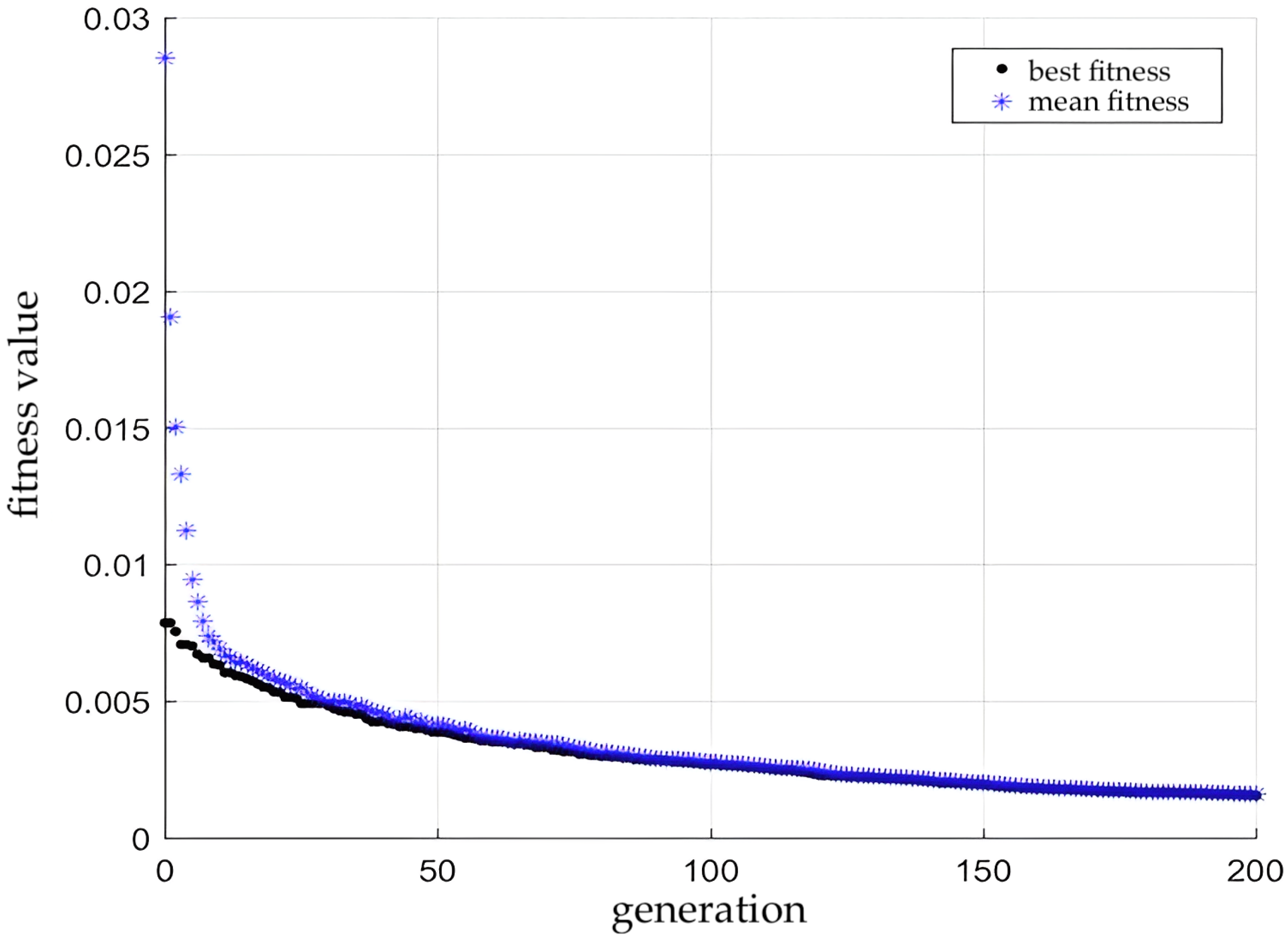
3.4. Design of the Genetic Algorithm for a PID Controller
| Algorithm1: General structure of a GA |
 |
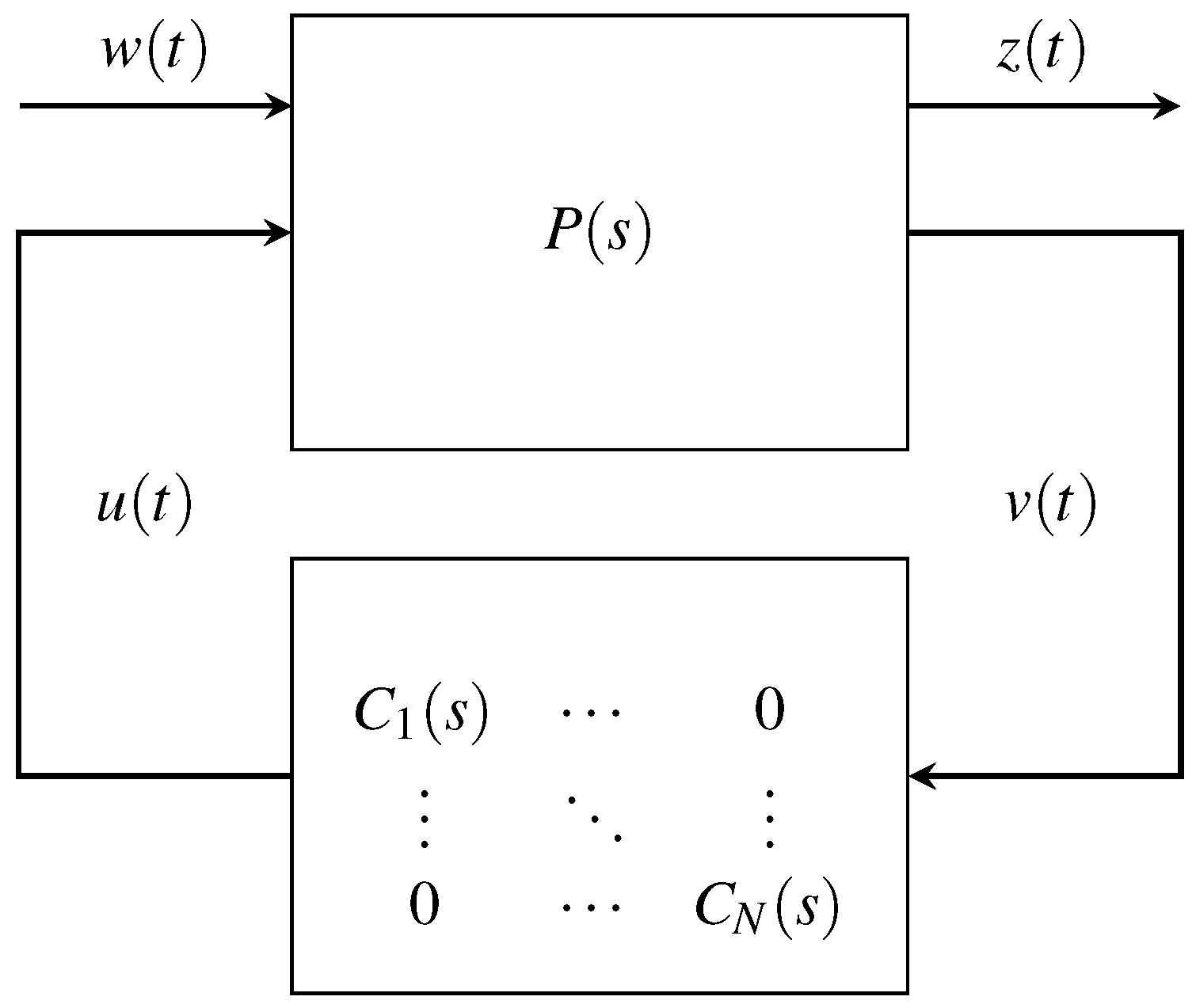
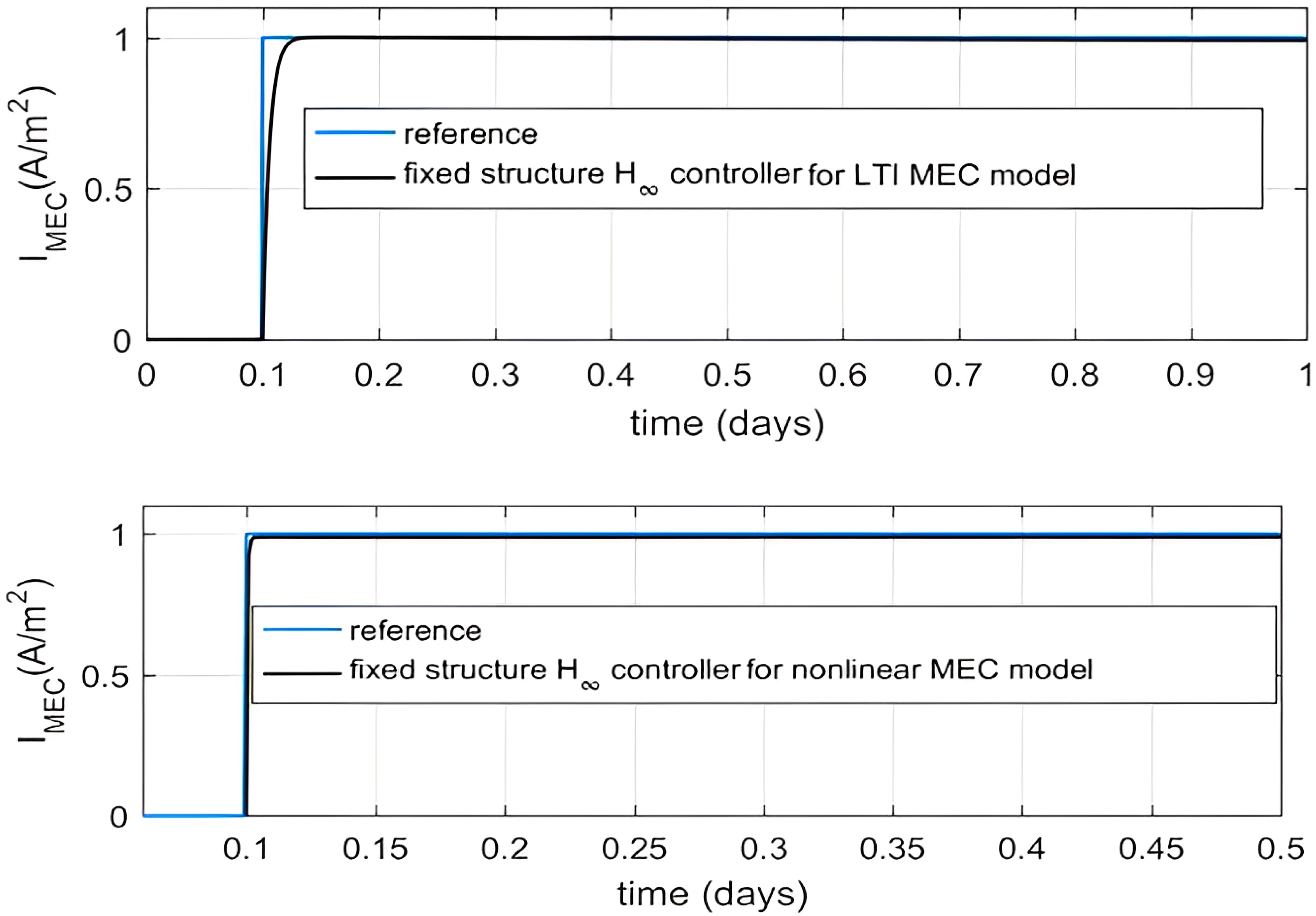
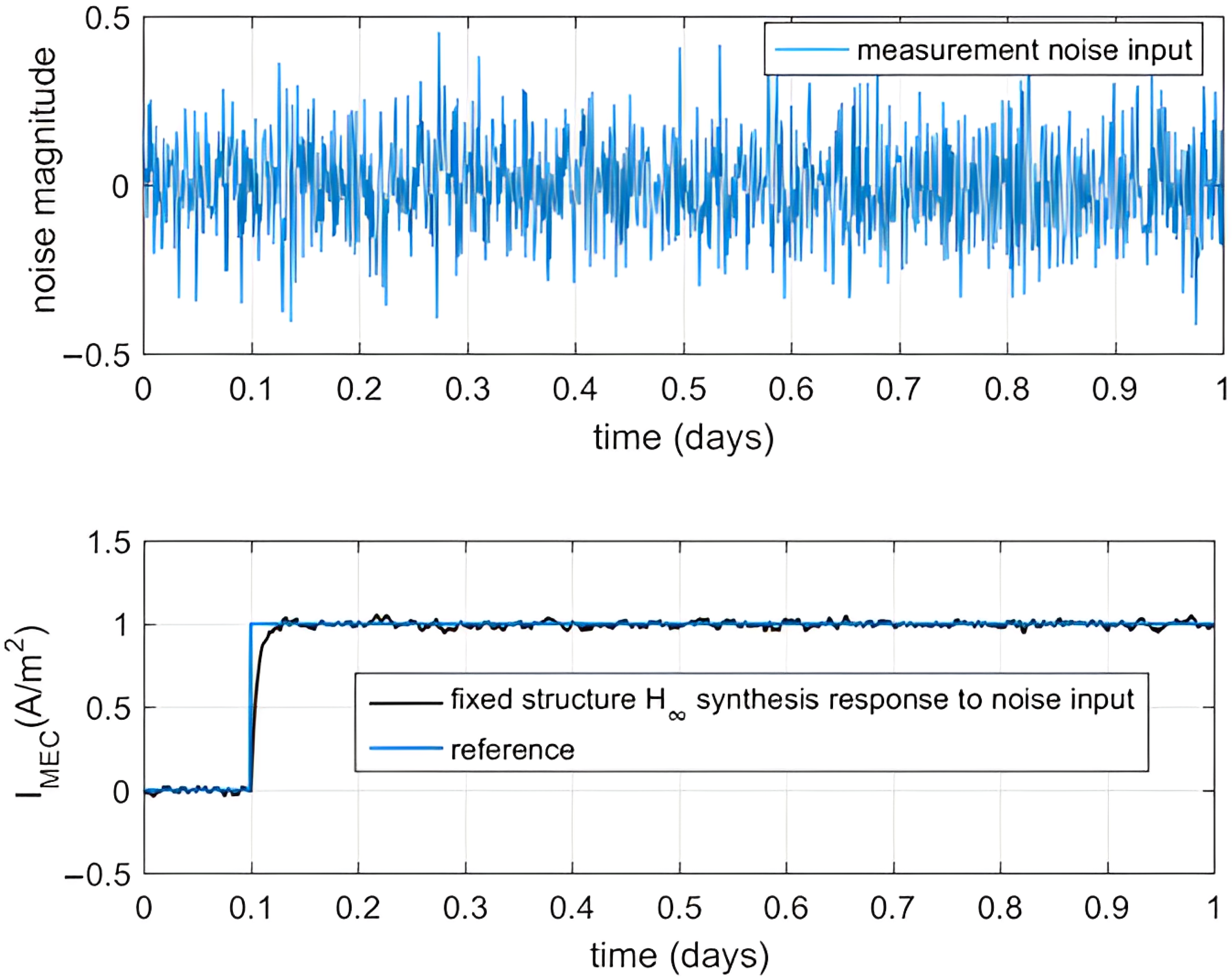
3.5. Design of the Proposed Fixed Order and Structured H Synthesis
- ltiblock.pid(‘C’,‘pid’);
- feedback(1,G(s)*C(s));
- feedback(G(s)*C(s),1);
- blkdiag(W*S(s),W*T(s));
4. Comparison, Discussion, and Conclusions
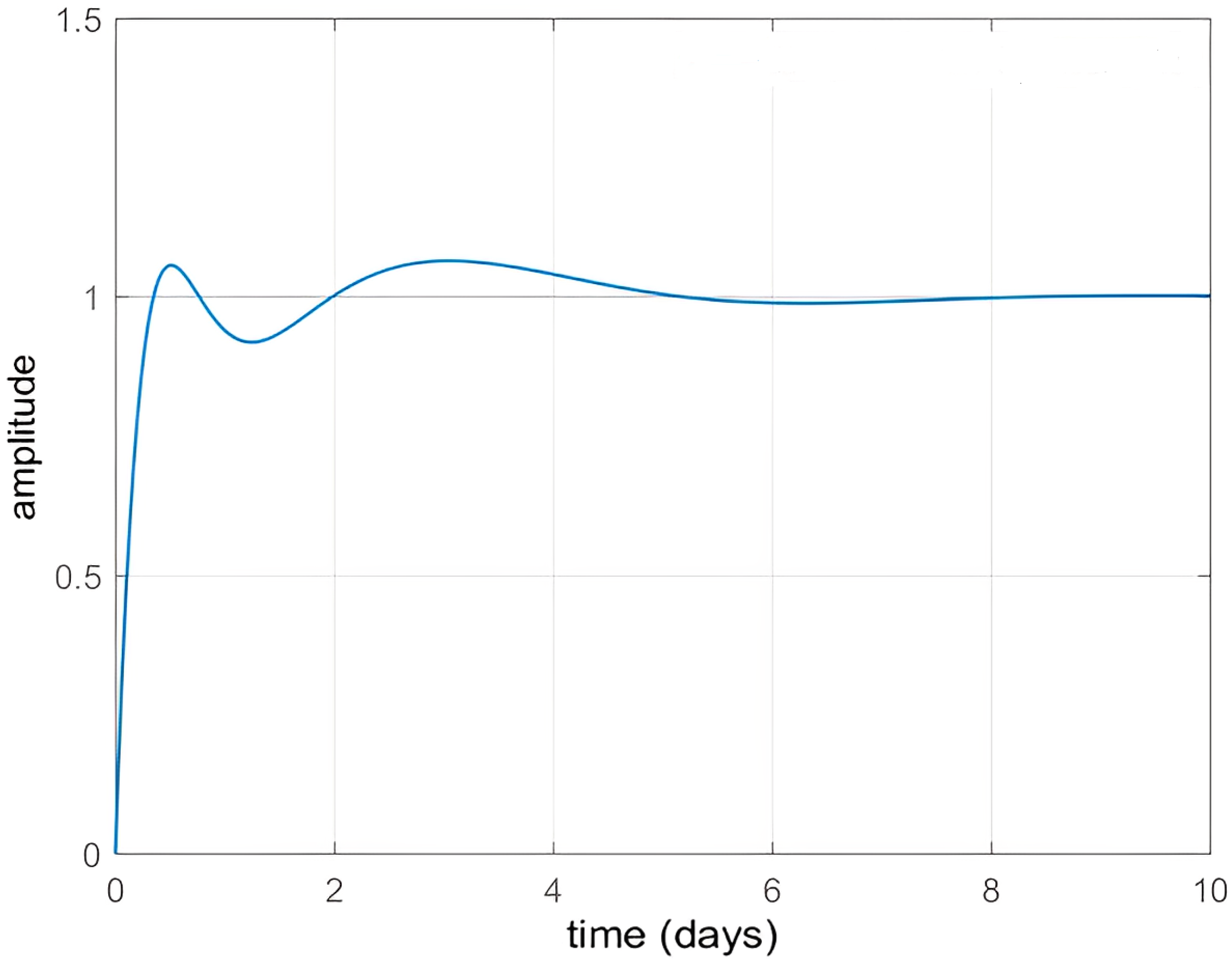
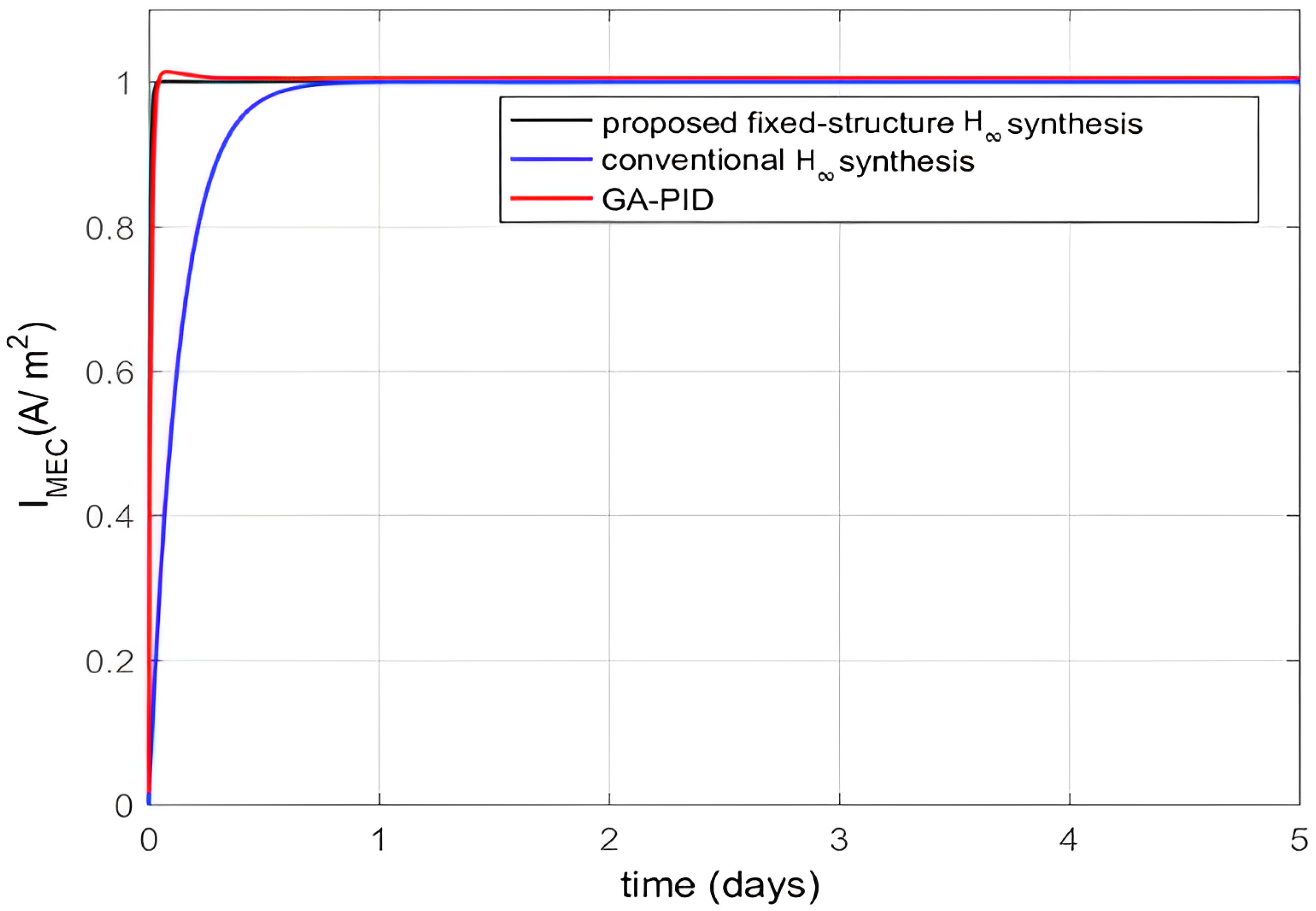
4.1. Performance Comparison and Discussion
4.2. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perea-Moreno, M.A.; Hernandez-Escobedo, Q.; Perea-Moreno, A.J. Renewable energy in urban areas: Worldwide research trends. Energies 2018, 11, 577. [Google Scholar] [CrossRef] [Green Version]
- Karasmanaki, E.; Tsantopoulos, G. Exploring future scientists’ awareness about and attitudes towards renewable energy sources. Energy Policy 2019, 131, 111–119. [Google Scholar] [CrossRef]
- Demirbaş, A. Global renewable energy resources. Energy Sources 2006, 28, 779–792. [Google Scholar] [CrossRef]
- Badwal, S.P.; Giddey, S.S.; Munnings, C.; Bhatt, A.I.; Hollenkamp, A.F. Emerging electrochemical energy conversion and storage technologies. Front. Chem. 2014, 2, 79. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Jenkins-Smith, H.C.; Silva, C.L.; Berrens, R.P.; Herron, K.G. Public support for reducing US reliance on fossil fuels: Investigating household willingness-to-pay for energy research and development. Ecol. Econ. 2009, 68, 731–742. [Google Scholar] [CrossRef]
- Marques, A.C.; Fuinhas, J.A.; Pereira, D.A. Have fossil fuels been substituted by renewables? An empirical assessment for 10 European countries. Energy Policy 2018, 116, 257–265. [Google Scholar] [CrossRef]
- Siddiqui, A.S.; Marnay, C.; Wiser, R.H. Real options valuation of US federal renewable energy research, development, demonstration, and deployment. Energy Policy 2007, 35, 265–279. [Google Scholar] [CrossRef] [Green Version]
- Staffell, I.; Scamman, D.; Abad, A.V.; Balcombe, P.; Dodds, P.E.; Ekins, P.; Shah, N.; Ward, K.R. The role of hydrogen and fuel cells in the global energy system. Energy Environ. Sci. 2019, 12, 463–491. [Google Scholar] [CrossRef] [Green Version]
- Abe, J.O.; Popoola, A.P.I.; Ajenifuja, E.; Popoola, O.M. Hydrogen energy, economy and storage: Review and recommendation. Int. J. Hydrogen Energy 2019, 44, 15072–15086. [Google Scholar] [CrossRef]
- Azwar, M.Y.; Hussain, M.A.; Abdul-Wahab, A.K. Development of biohydrogen production by photobiological, fermentation and electrochemical processes: A review. Renew. Sustain. Energy Rev. 2014, 31, 158–173. [Google Scholar] [CrossRef]
- Kadier, A.; Al-Shorgani, N.K.; Jadhav, D.A.; Sonawane, J.M.; Mathuriya, A.S.; Kalil, M.S.; Hasan, H.A.; Alabbosh, K.F. Microbial electrolysis cell (MEC): An innovative waste to bioenergy and value-added by-product technology. In Bioelectrosynthesis: Principles and Technologies for Value-Added Products; Wang, A., Liu, W., Zhang, B., Cai, W., Eds.; Wiley: New York, NY, USA, 2020; pp. 95–128. [Google Scholar]
- Montpart, N.; Rago, L.; Baeza, J.A.; Guisasola, A. Hydrogen production in single chamber microbial electrolysis cells with different complex substrates. Water Res. 2015, 68, 601–615. [Google Scholar] [CrossRef] [PubMed]
- Kiely, P.D.; Cusick, R.; Call, D.F.; Selembo, P.A.; Regan, J.M.; Logan, B.E. Anode microbial communities produced by changing from microbial fuel cell to microbial electrolysis cell operation using two different wastewaters. Bioresour. Technol. 2011, 102, 388–394. [Google Scholar] [CrossRef]
- Cario, B.P.; Rossi, R.; Kim, K.Y.; Logan, B.E. Applying the electrode potential slope method as a tool to quantitatively evaluate the performance of individual microbial electrolysis cell components. Bioresour. Technol. 2019, 287, 121418. [Google Scholar] [CrossRef] [PubMed]
- Gandu, B.; Rozenfeld, S.; Hirsch, L.O.; Schechter, A.; Cahan, R. Immobilization of bacterial cells on carbon-cloth anode using alginate for hydrogen generation in a microbial electrolysis cell. J. Power Sources 2020, 455, 227986. [Google Scholar] [CrossRef]
- Brogan, W.L. Modern Control Theory; Pearson Education: New Delhi, India, 1991. [Google Scholar]
- Li, Z.; Zhang, Z.; Liao, Q.; Rong, M. Asymptotic and robust stabilization control for the whole class of fractional-order gene regulation networks with time delays. Fractal Fract. 2022, 6, 406. [Google Scholar] [CrossRef]
- Xu, K.; Cheng, T.; Lopes, A.M.; Chen, L.; Zhu, X.; Wang, M. Fuzzy fractional-order PD vibration control of uncertain building structures. Fractal Fract. 2022, 6, 473. [Google Scholar] [CrossRef]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Picioreanu, C.; Head, I.M.; Katuri, K.P.; van Loosdrecht, M.C.; Scott, K. A computational model for biofilm-based microbial fuel cells. Water Res. 2007, 41, 2921–2940. [Google Scholar] [CrossRef]
- Kato Marcus, A.; Torres, C.I.; Rittmann, B.E. Conduction-based modeling of the biofilm anode of a microbial fuel cell. Biotechnol. Bioeng. 2007, 98, 1171–1182. [Google Scholar] [CrossRef]
- Pinto, R.P.; Srinivasan, B.; Manuel, M.F.; Tartakovsky, B. A two-population bio-electrochemical model of a microbial fuel cell. Bioresour. Technol. 2010, 101, 5256–5265. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Choo, Y.F.; Kim, B.H.; Wu, P. Modelling and simulation of two-chamber microbial fuel cell. J. Power Sources 2010, 195, 79–89. [Google Scholar] [CrossRef]
- Deb, D.; Patel, R.; Balas, V.E. A review of control-oriented bioelectrochemical mathematical models of microbial fuel cells. Processes 2020, 8, 583. [Google Scholar] [CrossRef]
- Patel, R.; Deb, D. Parametrized control-oriented mathematical model and adaptive backstepping control of a single chamber single population microbial fuel cell. J. Power Sources 2018, 396, 599–605. [Google Scholar] [CrossRef]
- Asrul, M.A.M.; Atan, M.F.; Yun, H.A.H.; Lai, J.C.H. Mathematical model of biohydrogen production in microbial electrolysis cell: A review. Int. J. Hydrogen Energy 2021, 46, 37174–37191. [Google Scholar] [CrossRef]
- Gadkari, S.; Gu, S.; Sadhukhan, J. Towards automated design of bioelectrochemical systems: A comprehensive review of mathematical models. Chem. Eng. J. 2018, 343, 303–316. [Google Scholar] [CrossRef]
- Azwara, Y.; Abdul-Wahabb, A.K.; Hussaina, M.A. Optimal production of biohydrogen gas via Microbial Electrolysis cells (MEC) in a controlled batch reactor system. Chem. Eng. Trans. 2013, 32, 727–732. [Google Scholar]
- Yahya, A.M.; Hussain, M.A.; Abdul Wahab, A.K. Modeling, optimization, and control of microbial electrolysis cells in a fed-batch reactor for production of renewable biohydrogen gas. Int. J. Energy Res. 2015, 39, 557–572. [Google Scholar] [CrossRef]
- Alcaraz–Gonzalez, V.; Rodriguez–Valenzuela, G.; Gomez–Martinez, J.J.; Dotto, G.L.; Flores–Estrella, R.A. Hydrogen production automatic control in continuous microbial electrolysis cells reactors used in wastewater treatment. J. Environ. Manag. 2021, 281, 111869. [Google Scholar] [CrossRef]
- Flores-Estrella, R.A.; Rodríguez-Valenzuela, G.; Ramírez-Leros, J.R.; Alcaraz-González, V.; González-Álvarez, V. A simple microbial electrochemical cell model and dynamic analysis towards control design. Chem. Eng. Commun. 2020, 207, 493–505. [Google Scholar] [CrossRef]
- Alshammari, O.; Kchaou, M.; Jerbi, H.; Ben Aoun, S.; Leiva, V. A fuzzy design for a sliding mode observer-based control scheme of Takagi-Sugeno Markov jump systems under imperfect premise matching with bio-economic and industrial applications. Mathematics 2022, 10, 3309. [Google Scholar] [CrossRef]
- Doyle, J.; Glover, K.; Khargonekar, P.; Francis, B. State-space solutions to standard H2 and H∞ control problems. In Proceedings of the 1988 American Control Conference, Atlanta, GA, USA, 15–17 June 1988; pp. 1691–1696. [Google Scholar]
- Stein, G.; Doyle, J.C. Beyond singular values and loop shapes. J. Guid. Control. Dyn. 1991, 14, 5–16. [Google Scholar] [CrossRef] [Green Version]
- McFarlane, D.; Glover, K. A loop-shaping design procedure using H/sub infinity/synthesis. IEEE Trans. Autom. Control. 1992, 37, 759–769. [Google Scholar] [CrossRef]
- Khalil, I.S.; Doyle, J.C.; Glover, K. Robust and Optimal Control; Prentice Hall: London, UK, 1996. [Google Scholar]
- Korkmaz, M.; Aydoğdu, Ö.; Doğan, H. Design and performance comparison of variable parameter nonlinear PID controller and genetic algorithm based PID controller. In Proceedings of the 2012 International Symposium on Innovations in Intelligent Systems and Applications, Trabzon, Turkey, 2–4 July 2012; pp. 1–5. [Google Scholar]
- Gahinet, P.; Apkarian, P. Decentralized and fixed-structure H∞ control in MATLAB. In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 8205–8210. [Google Scholar]
- Mitchell, T.; Overton, M.L. Fixed low-order controller design and H∞ optimization for large-scale dynamical systems. IFAC-PapersOnLine 2015, 48, 25–30. [Google Scholar] [CrossRef]
- Ahmad, M.; Ali, A.; Choudhry, M.A. Fixed-structure H∞ controller design for two-rotor aerodynamical system (TRAS). Arab. J. Sci. Eng. 2016, 41, 3619–3630. [Google Scholar] [CrossRef]
- Bruinsma, N.A.; Steinbuch, M. A fast algorithm to compute the H∞-norm of a transfer function matrix. Syst. Control. Lett. 1990, 14, 287–293. [Google Scholar] [CrossRef]
- Pinto, R.P.; Tartakovsky, B.; Srinivasan, B. Optimizing energy productivity of microbial electrochemical cells. J. Process. Control. 2012, 22, 1079–1086. [Google Scholar] [CrossRef]
- Borase, R.P.; Maghade, D.K.; Sondkar, S.Y.; Pawar, S.N. A review of PID control, tuning methods and applications. Int. J. Dyn. Control. 2021, 9, 818–827. [Google Scholar] [CrossRef]
- Başar, T.; Bernhard, P. H-Infinity Optimal Control and Related Minimax Design Problems: A Dynamic Game Approach; Springer: New York, NY, USA, 2008. [Google Scholar]
- Jayachitra, A.; Vinodha, R. Genetic algorithm based PID controller tuning approach for continuous stirred tank reactor. Adv. Artif. Intell. 2014, 2014, 791230. [Google Scholar] [CrossRef]
- Mirjalili, S. Genetic algorithm. In Evolutionary Algorithms and Neural Networks; Springer: Cham, Switzerland, 2019; pp. 43–55. [Google Scholar]
- Gahinet, P.; Apkarian, P. Structured H∞ synthesis in MATLAB. IFAC Proc. 2011, 44, 1435–1440. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Assumptions | Description |
|---|---|
| 1 | Anodophilic microorganisms make up the uniform distribution of the biofilm and are largely adhered to the anode electrode. |
| 2 | Despite being equally distributed throughout the bulk solution, very little of the acetoclastic methanogenic species are in contact with the anode. Additionally, there can be an excessive number of unattached anodophilic bacteria. |
| 3 | Multiplying monod kinetics is used to describe the growth of anodophilic bacteria, whereas simple monod kinetics is employed to model the growth of acetoclastic methanogenic bacteria. |
| 4 | The cathodic chamber is devoid of biomass. |
| 5 | Acetoclastic methanogenic and anodophili bacteria groups compete with each another for a shared substrate. |
| 6 | Anodic chamber has the ideal mixture. |
| 7 | Gradient of concentration of substrate in the biofilm is disregarded. |
| 8 | Bacteria always have the same amount of the internal electron transfer mediator [42]. |
| 9 | Gas transmission across the membrane is disregarded. |
| 10 | pH, temperature, and pressure remain unchanged. |
| Variable | Description |
|---|---|
| Dilution rate: | |
| Substrate bacteria concentration: | |
| Anodophilic bacteria concentration: | |
| Acetoclastic methanogenic bacteria concentration: | |
| MEC current density: |
| Symbol | Description | Value |
|---|---|---|
| Anode area | 1 | |
| Dimensionless fraction | 0.3 | |
| b | Endogenous decay rate | 0.05 |
| F | Faraday constant | 1.1167 Ad/mole |
| Yield factor for anodophilic | 0.667 mgS/mgX | |
| Yield factor for acetoclastic methanogenic | 0.667 mgS/mgX | |
| Decay rate | 0.04 | |
| Decay rate | 0.006 | |
| Half-rate constant | 20 M S L | |
| Half-rate constant | 80 M S L | |
| Biofilm thickness | ||
| m | Electrons per mole | 2 mole/mol M |
| P | Pressure | 1 |
| R | Ideal gas constant | 8.314 J/mol K |
| Inlet concentration | 400 mg/L | |
| T | Temperature | 298.15 |
| Reactor volume | 1 | |
| Initial concentration | 1000 ML | |
| Initial concentration | 100 ML | |
| Initial concentration | 100 ML | |
| Cathode efficiency | 0.8 | |
| Methane yield | mL CH4/mg S | |
| Dimensionless biofilm retention coefficients | 0.5 | |
| Number of coulombs from biomass | 0.0033 mF/MW | |
| Number of coulombs from substrate | 37.22 mF/MW | |
| Voltage | 0.5 | |
| Maximal growth rate | 0.3 | |
| Maximal growth rate | 1.97 |
| Symbols | Description | Value |
|---|---|---|
| Proportional gain | 104 | |
| Integral gain | 2.93 | |
| Derivative gain | 22.5 | |
| First order filter coefficient |
| Control | Rise Time | Settling Time | Overshoot | Controller | Steady-State |
|---|---|---|---|---|---|
| Technique | (Days) | (Days) | (%) | Order | Error |
| Traditional PID | 0.4000 | 4.4500 | 7.2500 | 2nd | 0.01% |
| GA-PID | 0.0210 | 0.0339 | 1.3994 | 2nd | 0% |
| Traditional H synthesis | 0.2929 | 0.5218 | 0 | 4th | 0% |
| Fixed-structure H controller | 0.0125 | 0.0221 | 0 | 2nd | 0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.Z.U.; Liaquat, R.; Rizwan, M.; Martin-Barreiro, C.; Leiva, V. A Robust Controller of a Reactor Electromicrobial System Based on a Structured Fractional Transformation for Renewable Energy. Fractal Fract. 2022, 6, 736. https://doi.org/10.3390/fractalfract6120736
Rahman MZU, Liaquat R, Rizwan M, Martin-Barreiro C, Leiva V. A Robust Controller of a Reactor Electromicrobial System Based on a Structured Fractional Transformation for Renewable Energy. Fractal and Fractional. 2022; 6(12):736. https://doi.org/10.3390/fractalfract6120736
Chicago/Turabian StyleRahman, Muhammad Zia Ur, Rabia Liaquat, Mohsin Rizwan, Carlos Martin-Barreiro, and Víctor Leiva. 2022. "A Robust Controller of a Reactor Electromicrobial System Based on a Structured Fractional Transformation for Renewable Energy" Fractal and Fractional 6, no. 12: 736. https://doi.org/10.3390/fractalfract6120736
APA StyleRahman, M. Z. U., Liaquat, R., Rizwan, M., Martin-Barreiro, C., & Leiva, V. (2022). A Robust Controller of a Reactor Electromicrobial System Based on a Structured Fractional Transformation for Renewable Energy. Fractal and Fractional, 6(12), 736. https://doi.org/10.3390/fractalfract6120736