
Overview of One-Dimensional Continuous Functions with Fractional Integral and Applications in Reinforcement Learning


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
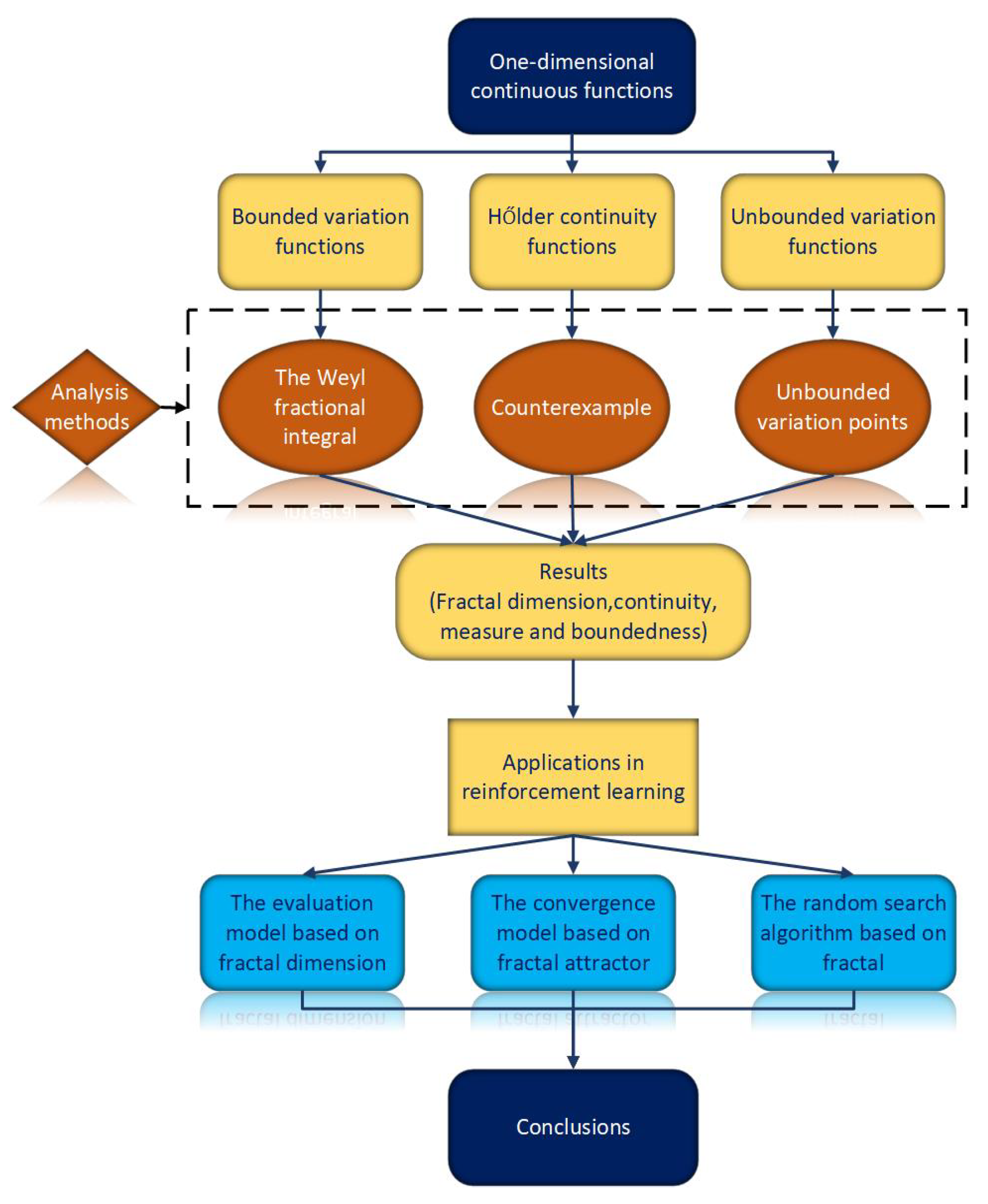
:1. Introduction
2. Basic Concepts
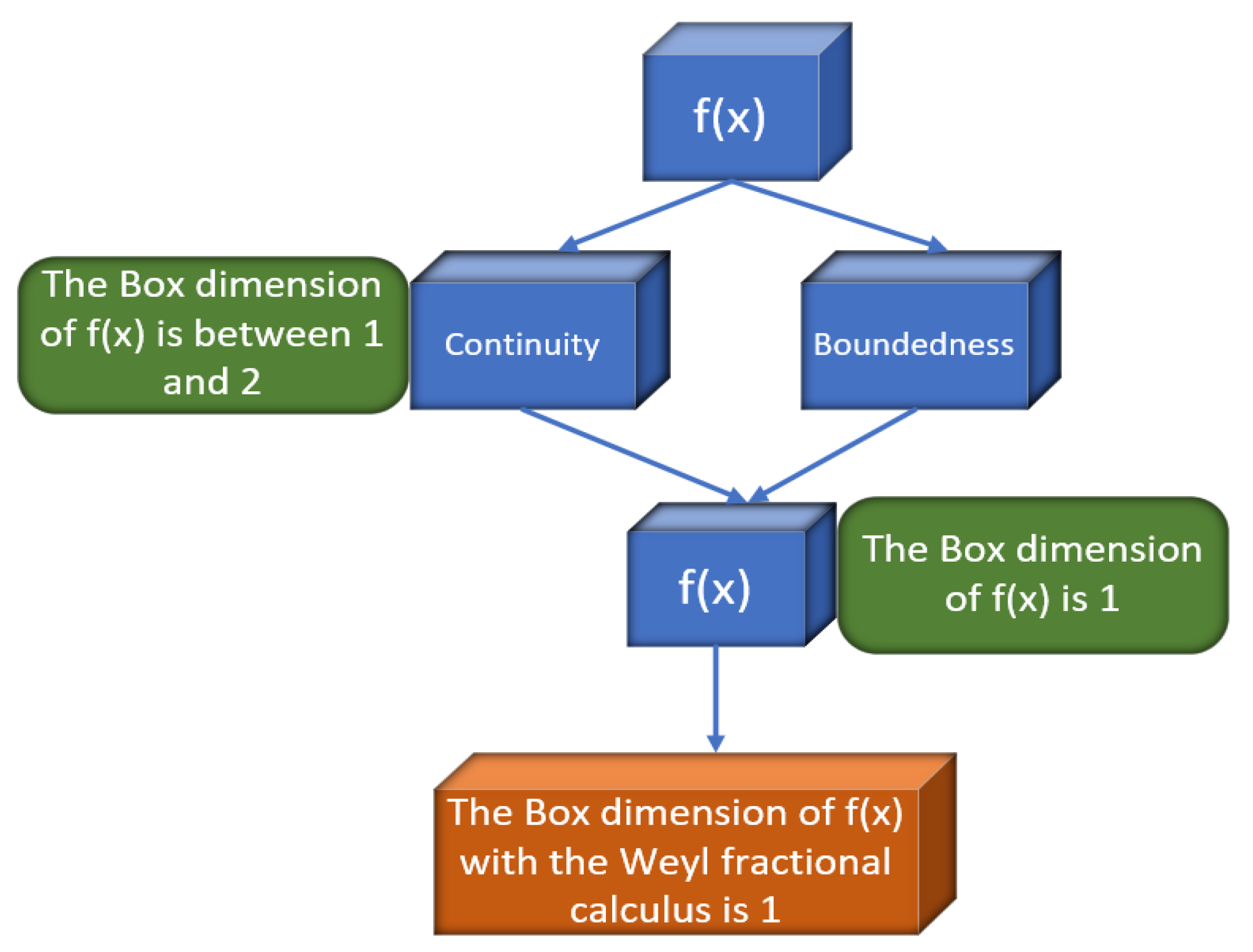
3. Bounded Variation Functions and Their Fractional Integral
- (1) If and is a continuous function, .
- (2) If , .
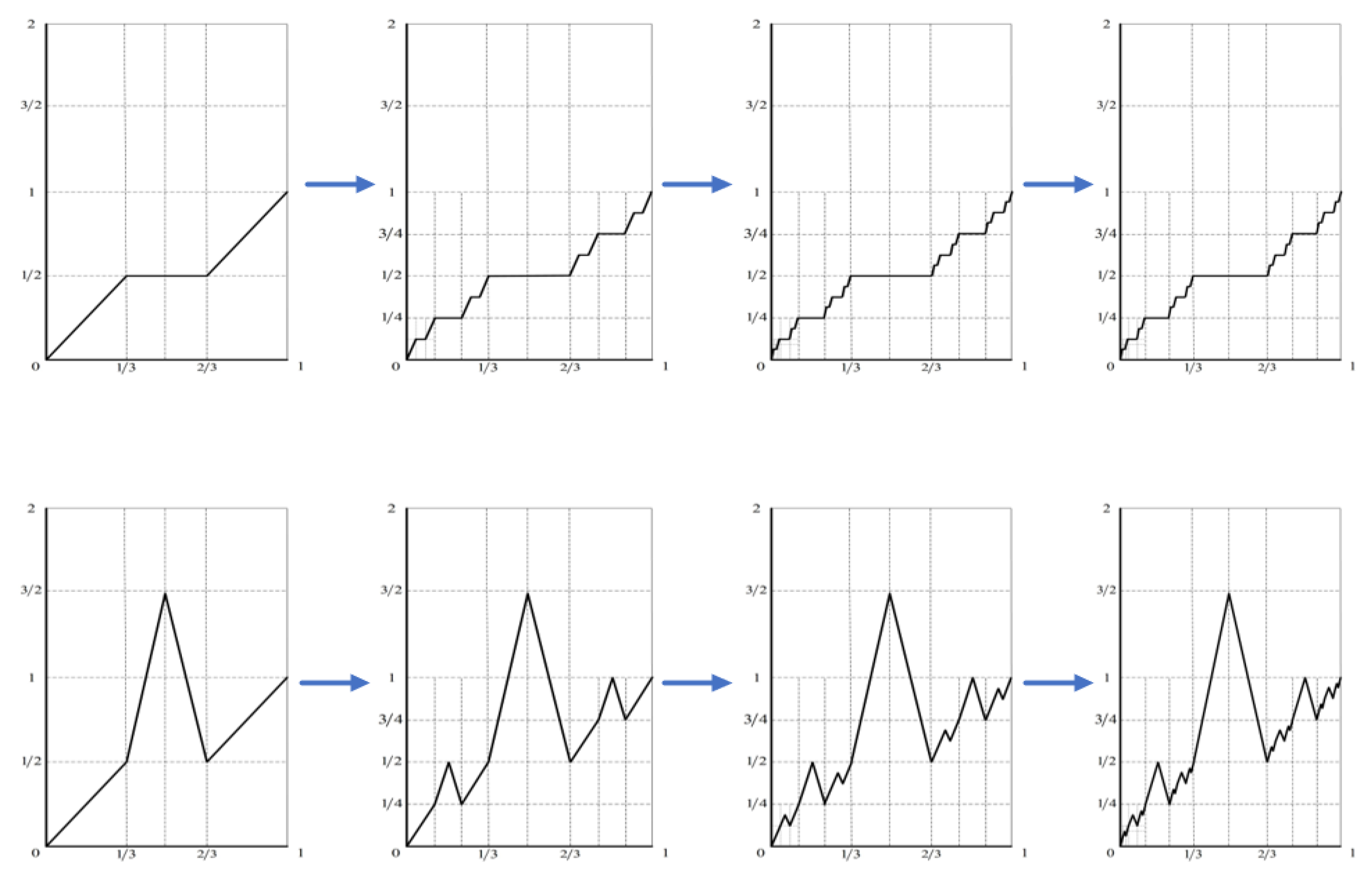
4. Unbounded Variation Functions (UVFs)
4.1. A Special UVF
4.2. UVF Satisfying the Hlder Condition of Order
4.3. UVF Not Satisfying the Hlder Condition of Any Order
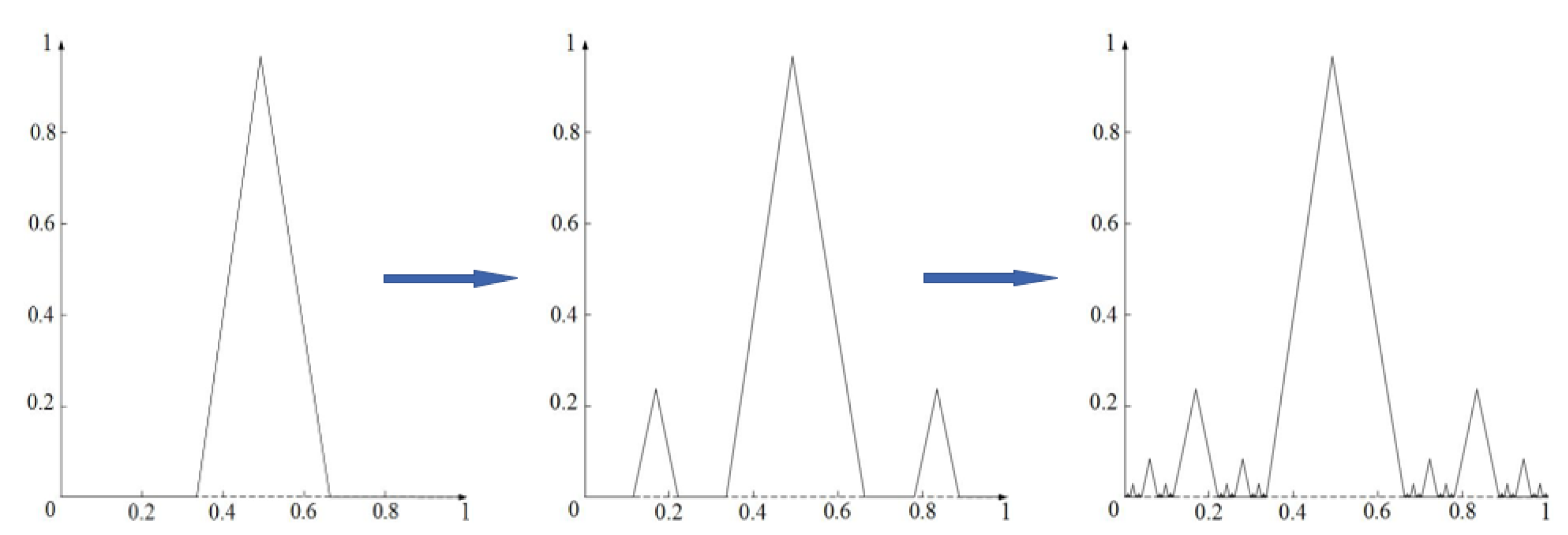
4.4. UVF Contained Finite UV Points
4.5. UVF Contained Infinite UV Points
5. Possible Applications in Reinforcement Learning
5.1. The Evaluation Model Based on Fractal Dimension
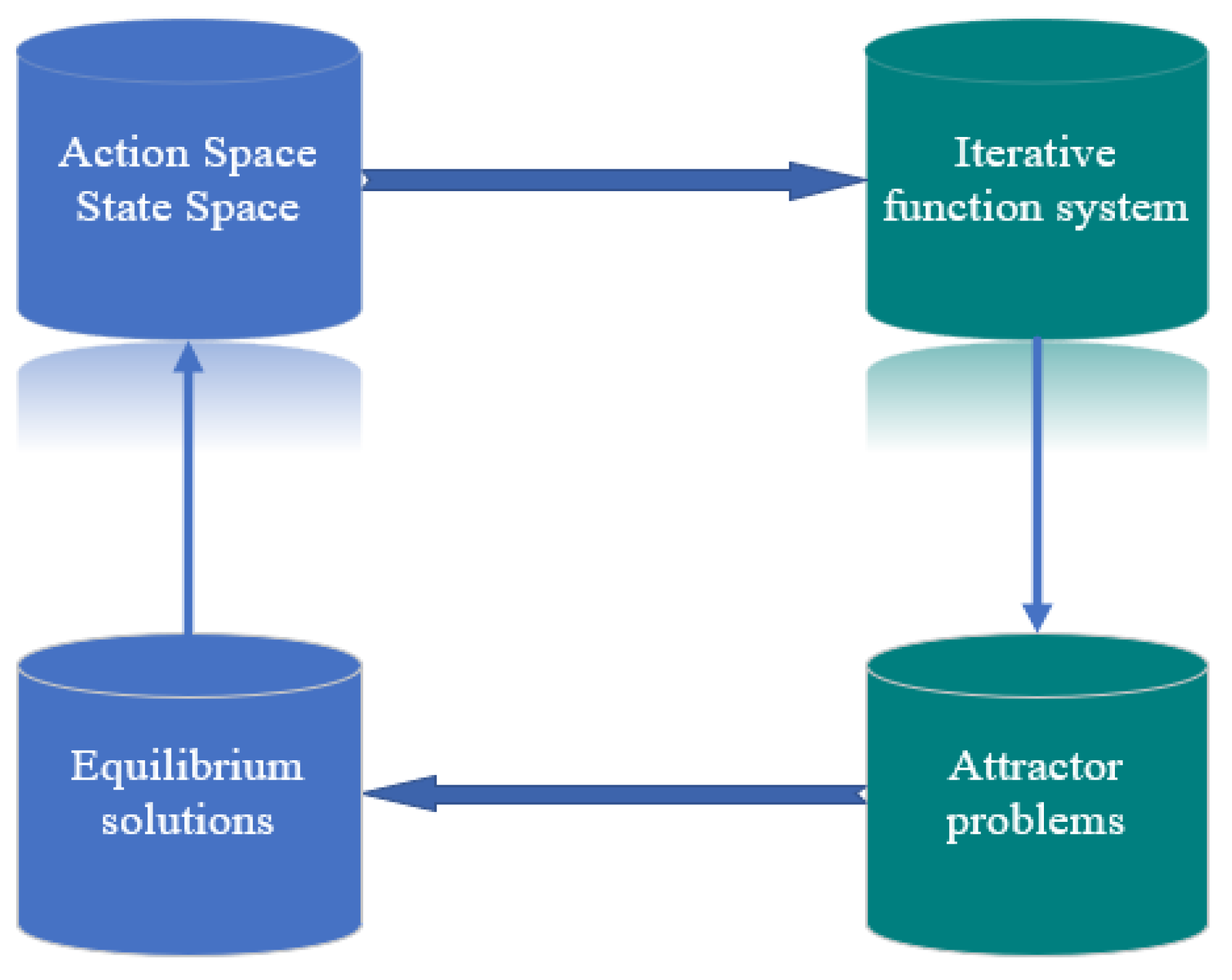
5.2. The Convergence Model Based on Fractal Attractor
5.3. The Random Search Algorithm Based on Fractal
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Srivastava, H.M.; Kashuri, A.; Mohammed, P.O.; Nonlaopon, K. Certain inequalities pertaining to some new generalized fractional integral operators. Fractal Fract. 2021, 5, 160. [Google Scholar] [CrossRef]
- Khan, M.B.; Noor, M.A.; Abdeljawad, T.; Mousa, A.A.A.; Abdalla, B.; Alghamdi, S.M. LR-preinvex interval-valued functions and Riemann–Liouville fractional integral inequalities. Fractal Fract. 2021, 5, 243. [Google Scholar] [CrossRef]
- Machado, J.T.; Mainardi, F.; Kiryakova, V. Fractional calculus: Quo vadimus? (Where are we going?). Fract. Calc. Appl. Anal. 2015, 18, 495–526. [Google Scholar] [CrossRef]
- Butera, S.; Paola, M.D. A physically based connection between fractional calculus and fractal geometry. Ann. Phys. 2014, 350, 146–158. [Google Scholar] [CrossRef]
- Kolwankar, K.M.; Gangal, A.D. Fractional differentiability of nowhere differentiable functions and dimensions. Chaos Solitons Fractals 1996, 6, 505–513. [Google Scholar] [CrossRef] [Green Version]
- Kolwankar, K.M.; Gangal, A.D. Hölder exponent of irregular signals and local fractional derivatives. Pramana J. Phys. 1997, 48, 49–68. [Google Scholar] [CrossRef] [Green Version]
- Nigmatullin, R.R.; Baleanu, D. Relationships between 1D and space fractals and fractional integrals and their applications in physics. In Applications in Physics, Part A; De Gruyter: Berlin, Germany, 2019; Volume 4, pp. 183–220. [Google Scholar]
- Tatom, F.B. The relationship between fractional calculus and fractals. Fractals 1995, 3, 217–229. [Google Scholar] [CrossRef]
- Zähle, M.; Ziezold, H. Fractional derivatives of weierstrass-type functions. J. Comput. Appl. Math. 1996, 76, 265–275. [Google Scholar] [CrossRef] [Green Version]
- Liang, Y.S. The relationship between the Box dimension of the Besicovitch functions and the orders of their fractional calculus. Appl. Math. Comput. 2008, 200, 197–207. [Google Scholar] [CrossRef]
- Ruan, H.J.; Su, W.Y.; Yao, K. Box dimension and fractional integral of linear fractal interpolation functions. J. Approx. Theory 2009, 161, 187–197. [Google Scholar] [CrossRef] [Green Version]
- Liang, Y.S. Box dimensions of Riemann-Liouville fractional integrals of continuous functions of bounded variation. Nonlinear Anal. 2010, 72, 4304–4306. [Google Scholar] [CrossRef]
- Liang, Y.S. Fractal dimension of Riemann-Liouville fractional integral of 1-dimensional continuous functions. Fract. Calc. Appl. Anal. 2018, 21, 1651–1658. [Google Scholar] [CrossRef]
- Wu, J.R. On a linearity between fractal dimensions and order of fractional calculus in Hölder space. Appl. Math. Comput. 2020, 385, 125433. [Google Scholar] [CrossRef]
- Verma, S.; Viswanathan, P. A note on Katugampola fractional calculus and fractal dimensions. Appl. Math. Comput. 2018, 339, 220–230. [Google Scholar] [CrossRef]
- Verma, S.; Viswanathan, P. Bivariate functions of bounded variation: Fractal dimension and fractional integral. Indag. Math. 2020, 31, 294–309. [Google Scholar] [CrossRef] [Green Version]
- Bush, K.A. Continuous functions without derivatives. Am. Math. Mon. 1952, 59, 222–225. [Google Scholar] [CrossRef]
- Shen, W.X. Hausdorff dimension of the graphs of the classical Weierstrass functions. Math. Z. 2018, 289, 223–266. [Google Scholar] [CrossRef] [Green Version]
- Su, W.Y. Construction of fractal calculus. Sci. China Math. Chin. Ser. 2015, 45, 1587–1598. [Google Scholar] [CrossRef]
- Xie, T.F.; Zhou, S.P. On a class of fractal functions with graph box dimension 2. Chaos Solitons Fractals 2004, 22, 135–139. [Google Scholar] [CrossRef]
- Liang, Y.S.; Su, W.Y. Von Koch curves and their fractional calculus. Acta Math. Sin. Chin. Ser. 2011, 54, 227–240. [Google Scholar]
- Wang, J.; Yao, K. Construction and analysis of a special one-dimensional continuous functions. Fractals 2017, 25, 1750020. [Google Scholar] [CrossRef]
- Wang, J.; Yao, K.; Liang, Y.S. On the connection between the order of Riemann-Liouvile fractional falculus and Hausdorff dimension of a fractal function. Anal. Theory Appl. 2016, 32, 283–290. [Google Scholar] [CrossRef]
- Falconer, K.J. Fractal Geometry: Mathematical Foundations and Applications; John Wiley Sons Inc.: Chicheste, PA, USA, 1990. [Google Scholar]
- Wen, Z.Y. Mathematical Foundations of Fractal Geometry; Science Technology Education Publication House: Shanghai, China, 2000. (In Chinese) [Google Scholar]
- Hu, T.Y.; Lau, K.S. Fractal dimensions and singularities of the weierstrass type functions. Trans. Am. Math. Soc. 1993, 335, 649–665. [Google Scholar] [CrossRef]
- Zheng, W.X.; Wang, S.W. Real Function and Functional Analysis; High Education Publication House: Beijing, China, 1980. (In Chinese) [Google Scholar]
- Tian, L. The estimates of Hölder index and the Box dimension for the Hadamard fractional integral. Fractals 2021, 29, 2150072. [Google Scholar] [CrossRef]
- Wang, C.Y. R-L Algorithm: An approximation algorithm for fractal signals based on fractional calculus. Fractals 2020, 24, 2150243. [Google Scholar] [CrossRef]
- Oldham, K.B.; Spanier, J. The Fractional Calculus; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Teodoro, G.S.; Machado, J.A.; Oliveira, E.C. A review of definitions of fractional derivatives and other operators. J. Comput. Phys. 2019, 388, 195–208. [Google Scholar] [CrossRef]
- Kiryakova, V.S. Generalized Fractional Calculus and Applications; CRC Press: Boca Raton, FL, USA, 1993. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley Sons Inc.: New York, NY, USA, 1976. [Google Scholar]
- Podlubny, I. Geometric and physical interpretation of fractional integration and fractional differentiation. Fract. Calc. Appl. Anal. 2002, 5, 367–386. [Google Scholar]
- Mu, L.; Yao, K.; Wang, J. Box dimension of weyl fractional integral of continuous functions with bounded variation. Anal. Theory Appl. 2016, 32, 174–180. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Titioura, A.A. Nonlinear differential equations with marchaud-hadamard-type fractional derivative in the weighted sapce of summable functions. Math. Model. Anal. 2007, 12, 343–356. [Google Scholar] [CrossRef]
- Tian, L. Hölder continuity and box dimension for the Weyl fractional integral. Fractals 2020, 28, 2050032. [Google Scholar] [CrossRef]
- Yao, K.; Liang, Y.S.; Su, W.Y.; Yao, Z.Q. Fractal dimension of fractional derivative of self-affine functions. Acta Math. Sin. Chin. Ser. 2013, 56, 693–698. [Google Scholar]
- Xu, Q. Fractional integrals and derivatives to a class of functions. J. Xuzhou Norm. Univ. 2006, 24, 19–23. [Google Scholar]
- Stein, E.M. Singular Integrals and Differentiability Properties of Functions; Princeton University Press: Princeton, NJ, USA, 1970. [Google Scholar]
- Liang, Y.S.; Su, W.Y. Fractal dimensions of fractional integral of continuous functions. Acta Math. Sin. 2016, 32, 1494–1508. [Google Scholar] [CrossRef]
- Liang, Y.S.; Zhang, Q. 1-dimensional continuous functions with uncountable unbounded variation points. Chin. J. Comtemporary Math. 2018, 39, 129–136. [Google Scholar]
- Silver, D.; Schrittwieser, J.; Simonyan, K.; Antonoglou, I.; Huang, A.; Guez, A.; Hubert, T.; Baker, L.; Lai, M.; Bolton, A.; et al. Mastering the game of go without human knowledge. Nature 2017, 550, 354–359. [Google Scholar] [CrossRef]
- Magnani, L. AlphaGo, Locked Strategies, and Eco-Cognitive Openness; Eco-Cognitive Computationalism Springer: Cham, Switzerland, 2021; pp. 45–71. [Google Scholar]
- Liu, S.; Pan, Z.; Cheng, X. A novel fast fractal image compression method based on distance clustering in high dimensional sphere surface. Fractals 2017, 25, 1740004. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Wu, Y.; Cui, X.; Dong, H.; Fang, F.; Russell, S. Robust multi-agent reinforcement learning via minimax deep deterministic policy gradient. Proc. Aaai Conf. Artif. Intell. 2019, 33, 4213–4220. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Jiang, B.; Zhu, H.; Che, Z.; Liu, Y. Generative attention networks for multi-agent behavioral modeling. Proc. Aaai Conf. Artif. Intell. 2020, 34, 7195–7202. [Google Scholar] [CrossRef]
- Liu, S.; Wang, S.; Liu, X.Y.; Gandomi, A.H.; Daneshmand, M.; Muhammad, K.; de Albuquerque, V.H.C. Human Memory Update Strategy: A multi-layer template update mechanism for remote visual monitoring. IEEE Trans. Multimed. 2021, 23, 2188–2198. [Google Scholar] [CrossRef]
- Hoerger, M.; Kurniawati, H. An on-line POMDP solver for continuous observation spaces. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 7643–7649. [Google Scholar]
- Igl, M.; Zintgraf, L.; Le, T.A.; Wood, F.; Whiteson, S. Deep variational reinforcement learning for POMDPs. Int. Conf. Mach. Learn. 2018, 16, 2117–2126. [Google Scholar]
- Zhou, Z.H. Neural Networks. In Machine Learning; Springer: Singapore, 2021. [Google Scholar]
- Yang, L.; Zhang, R.Y.; Li, L.; Xie, X. Simam: A simple parameter-free attention module for convolutional neural networks. Int. Conf. Mach. Learn. 2021, 26, 11863–11874. [Google Scholar]
- Almatroud, A.O. Extreme multistability of a fractional-order discrete-time neural network. Fractal Fract. 2021, 5, 202. [Google Scholar] [CrossRef]
- Alomoush, M.I. Optimal combined heat and power economic dispatch using stochastic fractal search algorithm. J. Mod. Power Syst. Clean Energy 2020, 8, 276–286. [Google Scholar] [CrossRef]
- Tran, T.T.; Truong, K.H. Stochastic fractal search algorithm for reconfiguration of distribution networks with distributed generations. Ain Shams Eng. J. 2020, 11, 389–407. [Google Scholar] [CrossRef]
- Pham, L.H.; Duong, M.Q.; Phan, V.D.; Nguyen, T.T.; Nguyen, H.N. A high-performance stochastic fractal search algorithm for optimal generation dispatch problem. Energies 2019, 12, 1796. [Google Scholar] [CrossRef] [Green Version]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jun, W.; Lei, C.; Bin, W.; Hongtao, G.; Wei, T. Overview of One-Dimensional Continuous Functions with Fractional Integral and Applications in Reinforcement Learning. Fractal Fract. 2022, 6, 69. https://doi.org/10.3390/fractalfract6020069
Jun W, Lei C, Bin W, Hongtao G, Wei T. Overview of One-Dimensional Continuous Functions with Fractional Integral and Applications in Reinforcement Learning. Fractal and Fractional. 2022; 6(2):69. https://doi.org/10.3390/fractalfract6020069
Chicago/Turabian StyleJun, Wang, Cao Lei, Wang Bin, Gong Hongtao, and Tang Wei. 2022. "Overview of One-Dimensional Continuous Functions with Fractional Integral and Applications in Reinforcement Learning" Fractal and Fractional 6, no. 2: 69. https://doi.org/10.3390/fractalfract6020069
APA StyleJun, W., Lei, C., Bin, W., Hongtao, G., & Wei, T. (2022). Overview of One-Dimensional Continuous Functions with Fractional Integral and Applications in Reinforcement Learning. Fractal and Fractional, 6(2), 69. https://doi.org/10.3390/fractalfract6020069