1. Introduction
In many fields including mathematics, physics and engineering, the problem of solving nonlinear equations
is involved where
is a differentiable function defined in an open interval
D. It is almost impossible to find the exact solutions of nonlinear equations, so an iterative method is used to obtain the as accurate as possible approximate solutions. The most classic iterative scheme is Newton’s iterative method [
1]. In recent years, many researchers have devoted themselves to designing a class of high-order iterative methods to solve nonlinear equations by using different techniques to improve Newton’s scheme. Rational linear function method [
2], combination method [
3] and weight-function method [
4] are often used to generate new iterative methods or to improve the convergence order of known methods.
Ostrowski’s method [
5] is the optimal fourth-order method under the Kung–Traub’s conjecture [
6]. A variant of Ostrowski-type methods using the weight-function procedure is proposed by Chun [
7], which is given by
where
and
represents a weight function. In view of Theorem 1 of Reference [
6], if function
satisfies the conditions
,
, and
, then the above iteration scheme is sixth-order. In the current study, we will select the concrete form of
with two-parameter
t,
:
Hence, we obtain the following biparametric family of sixth-order method (OM):
The fixed point operator of (
2) or iteration function is:
where:
For simplicity, we mark
w as
.
For arbitrary members (except for
and
) of the OM family (2), the speed of convergence is similar. Our main interest is the stability of the OM family in this paper. Since the dynamic properties of the iterative method provide us with important information about the stability and reliability of members. In these respects, several scholars described the dynamical behavior of different iterative families (see [
4,
6,
8,
9,
10,
11]). For example, Maroju et al. [
11] analyzed the dynamical behavior of Chebyshev–Halley family. Magreñán [
12] studied some anomalies in the fourth-order Jarrat family. These iterative methods are all one-parameter iterative schemes. We will investigate the dynamic properties of rational functions
on low-degree polynomials associated with the biparametric family (2) with the help of complex dynamics tools [
13]. This analysis allows us to reject poorly behaved members and select the most stable ones.
Now, we review some basic dynamical concepts (see [
8,
9,
14]) which will be used in paper. Given a rational function
, where
is the Riemann sphere, the orbit of a point
is defined as
Moreover, a fixed point
can be divided into the following four types:
- (a)
Attractor if .
- (b)
Superattractor if .
- (c)
Repulsor if .
- (d)
Parabolic if .
The basin of attraction of an attractor
is defined as
This article is divided into seven sections.
Section 2 briefly describes the preliminary results of the dynamics on
. In
Section 3, we obtain the strange fixed points of
and investigate its stability. In
Section 4, the relevant properties of the free critical points are described.
Section 5 presents the parameter space associated with free critical points and the dynamic plane of family (2) elements. In
Section 6, we conduct numerical experiments on the proposed method and the existing methods. In
Section 7, we make a short summary.
2. Preliminary Results
Theorem 1 (The Scaling Theorem)
. Let be an analytic function on the Riemann sphere, and let , be an affine map. If , then the fixed points operator (3) is analytically conjugated to by Γ, that is . Proof. With the iteration function
, we have:
since:
we obtain:
and
Using (
6) and (
8), we obtain:
Therefore:
We then just need to prove that
and
. First prove that
. By using the Taylor expansion of
about
and (
9), we have:
The prove that
. Because:
Replacing
z with
in (
13), we obtain:
From (14), we obtain
; then this proof is completed. □
The above theorem shows that it allows us to conjugate the dynamical behavior of one operator with the behavior related to another, conjugated by an affine application.
Definition 1. Let and be two functions (representing two dynamical systems). We say that is conjugate to via Γ if there exists an isomorphism such that . Such a map Γ is called a conjugacy [15]. According to Theorem 1 which was proven in [
4], we find:
Theorem 2. Let and be defined by Definition 1 be of class and are conjugate to each other via the diffeomorphic conjugacy Γ. Moreover, let ξ be a fixed point of . Then, the following hold:
- (a)
The fixed points property remains invariant under a topological conjugacy Γ, that is:
- (b)
The Poincar characteristic multiplier [10] of ξ by , denoted by , is invariant under a diffeomorphic conjugacy Γ, that is:
Remark 1. Results of Theorem 2 state that a conjugacy Γ indeed preserves the dynamical behavior between the two dynamical systems; for example, if and are conjugate to each other via Γ, and ξ is a fixed point of , then is a fixed point of . The converse is also true, that is, let ξ be a fixed point of , then is a fixed point of ; Furthermore, ξ is a critical point or free critical point of , then is a critical point or free critical point of . The converse is also true. The above is based on the invariance properties of the fixed point and its multiplier under the conjugacy.
Furthermore, we discover
and
. If
and
are extra invertible, we can also find
and
, besides the topological conjugacy,
maps an orbit:
of
onto an orbit:
of
, where
. From this, we find that the order of points is preserved. Thus, the orbits of the two maps behave similarly under homeomorphism
. According to the invariant properties of the fixed point, the multiplier as well as the scaling theorem, it is assuredly of value to study the dynamics of a conjugated map if simplified through conjugacy
.
3. Fixed Points and Stability
Due to topological invariance, we transform
in (
3) into
by a linear fractional M
bius conjugacy map
fulfilling:
when applied to an arbitrary prototype quadratic polynomial
, where
I and
are rational polynomials whose coefficients are dependent upon parameters
. One of our aims is to make coefficients of both
I and
be minimally dependent on parameters. According to the previously mentioned conjugate, we find that all the coefficients of both
I and
are only dependent upon
t and
k, and independent of
a and
b. Consequently, with the aid of the symbolic operation capability of Mathematica [
16], (
15) can be written as
where:
We then apply a special treatment to
t, the cases for values
. The aim is to simplify the rational function also to reduce the dependence on the parameters even further. In this study, the more interesting one is
, which corresponds to the fixed point operator of the following form:
We will investigate the fixed points of
and their stability. The fixed points of
are given by the roots of:
where we handily denote:
The conjugacy map we consider is a M
bius transformation
, with the following properties:
This enable us to discover that and are clearly two fixed points of , with , respectively, corresponding to fixed points a and b of or the roots a and b of polynomial . Furthermore, are free of the parameter k. In addition, they are super-attractive points and suggest the critical points of .
Nonetheless, because
,
, that is, their orbits draw near themselves, such fixed points would show a tiny impact on the dynamics. Fixed points not excluding
are termed as strange fixed points which are different from the roots of
. In order to find further strange fixed points, we need to solve the equations
in (
20) for
z with given values of
k.
3.1. Strange Fixed Points
We first check the existence of k-values for common factors (divisors) of and . Additionally, both and will be checked if they have a factor . The following theorem best describes the relevant properties of such existence as well as explicit strange fixed points.
Theorem 3. - (a)
If , then and have a common factor , the operator Ω has the strange fixed points ;
- (b)
If , then and have two common factors and , the operator Ω has the strange fixed points ;
- (c)
If , then has a factor , the operator Ω has the strange fixed points ;
- (d)
If , then has a factor , the operator Ω has the strange fixed points ;
- (e)
For k satisfying , the strange fixed points are given by and the six roots of in terms of parameter k.
Proof. (a), (b) Suppose that
and
for some values of
. Observe that parameter
k exists in a linear way in all coefficients of both polynomials. By eliminating
k from the two polynomials, we obtain the relation:
. Hence,
,
are candidates for common divisors of
and
. First, substituting
, we find
,
, from which
is obtained. Indeed,
and
reduce to, respectively,
and
, as desired. Second, dividing both
and
by
yields the identical remainder as
, from which the remainder becomes zero for
. Indeed,
and
reduce to, respectively,
and
. Accordingly, we find that
is indeed a common factor of
and
. Thus, dividing both
and
by
yields the remainder, respectively, as
,
and the remainder becomes zero for
. After that, it is the same as the previous common factor
. Third, the direct division of
by
is performed, then its remainder as
, which cannot be zero for any
k-values. The rest of the proof only needs to substitute the corresponding
and
into (
20) and solve its roots to be the strange fixed points.
- (c)
We find that has a factor for via solving . In fact, for , we also obtain . Hence, has a factor for . Then, , . The rest of its proof is trivial.
- (d)
If is a divisor of , then . For a value of , we discover . As a result, we obtain the strange fixed points z satisfying . The rest of the proof is similar to (a).
- (e)
It is straightforward for us to claim the results. We numerically obtain the strange fixed points z satisfying for given values of ; detailed analysis will be shown later.
□
3.2. Stability of the Strange Fixed Points
To study the stability of fixed points, we need to compute the first derivative of
from (
19):
where:
We first check the existence of k-values for common factors (divisors) of and . Additionally, and will be checked for whether they have divisors , . The following theorem best describes the relevant properties of such existence as well as explicit strange fixed points.
Theorem 4. - (a)
If , then ;
- (b)
If , then ;
- (c)
If , then ;
- (d)
If , then ;
- (e)
If , then we can demonstrate the desired stability of z by varying parameter k with the aid of Theorem 6.
Proof. (a), (b), (c) Suppose that and for some values of z. By eliminating k from the two polynomials, we obtain the relation: . Hence, ,,, are candidates for common divisors of and . After checking constraints ,, we find that yielding common divisors. By checking zero remainders when dividing both and by and , respectively, we find yielding common divisors.
- (d)
For to have a factor z, we require by solving for k. For to have a factor , we require its remainder , from which .
- (c)
If has a factor , then its remainder is , from which the remainder becomes zero for .
The rest of the above proof only needs to substitute the corresponding
and
into (
23).
- (e)
If k satisfies , then the graphical stability of z yields the desired results.
□
Regarding the stability of the strange fixed points, we conduct research in two cases. The first is the stability of the strange fixed points for special k-values; the second is the stability of the other strange fixed points corresponding to the root of and .
Using the results of Theorem 4 to describe the stability of the fixed points in Theorem 3 in terms of parameter
k.
Table 1 presents the stability results of the first case.
Theorem 5. Let , then the relevant properties of the strange fixed point are as follows:
- (a)
If , then is a superattracting point;
- (b)
If , then is an attractive point;
- (c)
If , then is a parabolic fixed point;
- (d)
At last, if , then is a repulsive point.
Proof. Substituting
into Equation (
23), we obtain:
It is easy to confirm that
. Again,
is equivalent to
. Let
be an arbitrary complex number. Then:
So:
By simplifying:
That is:
Therefore:
□
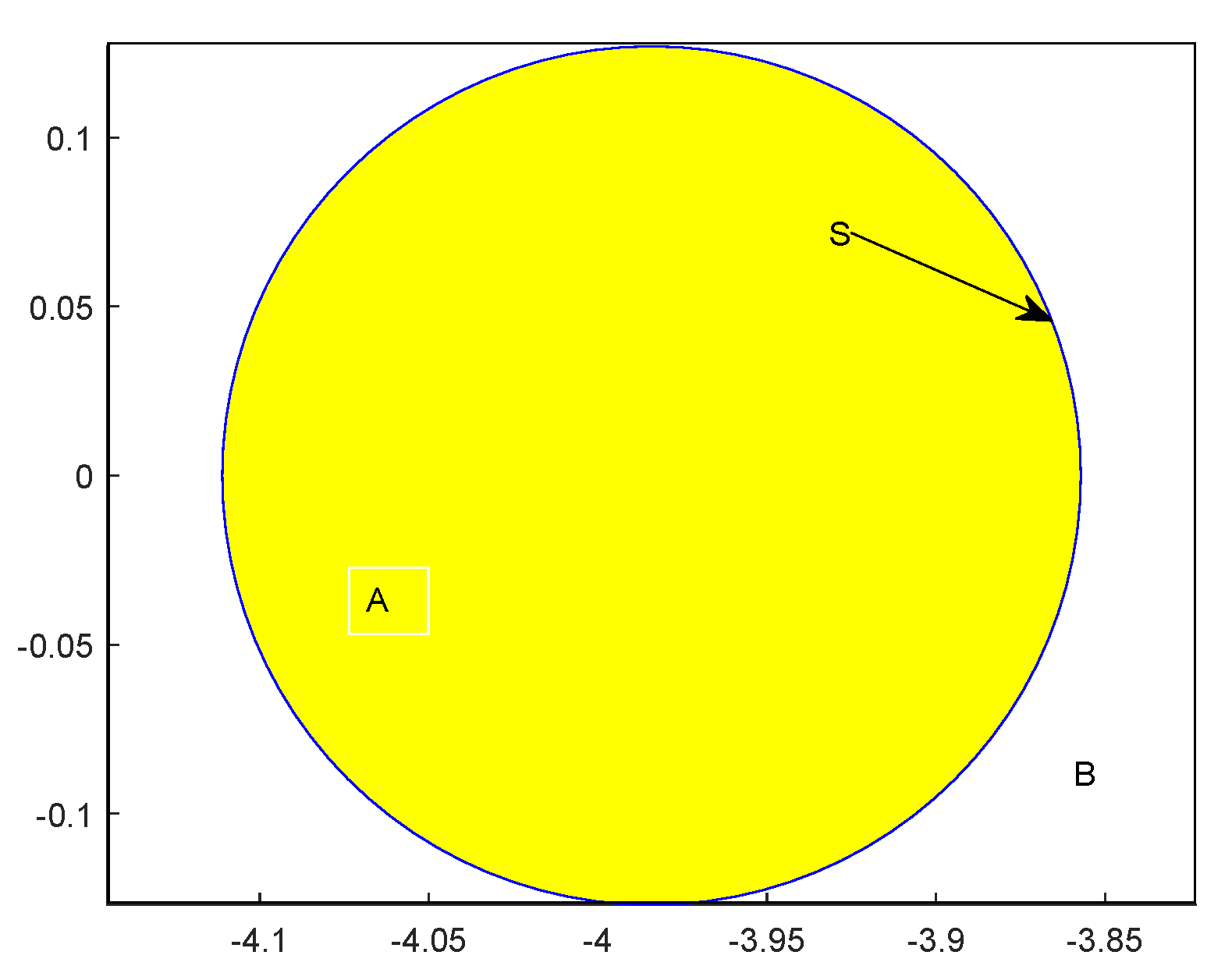
Remark 2. For later use, we conveniently let , and . Then, indicate the sets where the strange fixed point becomes attractive, repulsive, and indifferent, respectively. As seen in Figure 1, S is the boundary between A as a circle of radius centered at . Furthermore, Figure 2 shows a stability surface with (independent of parameter k). Lemma 1. If is the root of defined in (21), then is also a root of for any and any . Proof. Let
. Substituting
into
for
z, we obtain:
This completes the proof. □
Corollary 1. If is a fixed point of Ω defined in (19), then is also a fixed point of Ω. Proof. Based on the fact that is conjugate to via conjugacy . yThus, let , in Theorem 2, then Theorem 2 (b) completes this proof. □
Lemma 2. Let and be three roots of . Then, can be expressed as the product of three second-degree polynomials as follows:where or for in terms of k. Proof. In view of Lemma 1 and Corollary 1, we find that if is a strange fixed point of found from the roots of for , then so is .
Hence, the above factorization is valid. Then is easily acquired under the six-degree polynomials . can be obtained by expanding , it is clear that holds.
In order to continue to analyze the stability of the other fixed points from the root of
, we need to find the root of
first by solving
. By comparing the expansion of
with the coefficients of the same order term of
, we find that the following three equations are related to
:
We eliminate variables
in (
27) using the strong symbolic operation ability of Mathematica to ultimately access a decic equation in
beneath:
For convenience, we let
denote
. Eliminating
and
, respectively, we then obtain a unique decic equation in
as follows:
Now, we calculate the roots of
and attain:
where:
Then, substituting
for
. The result is a
k-dependent strange fixed point of
. □
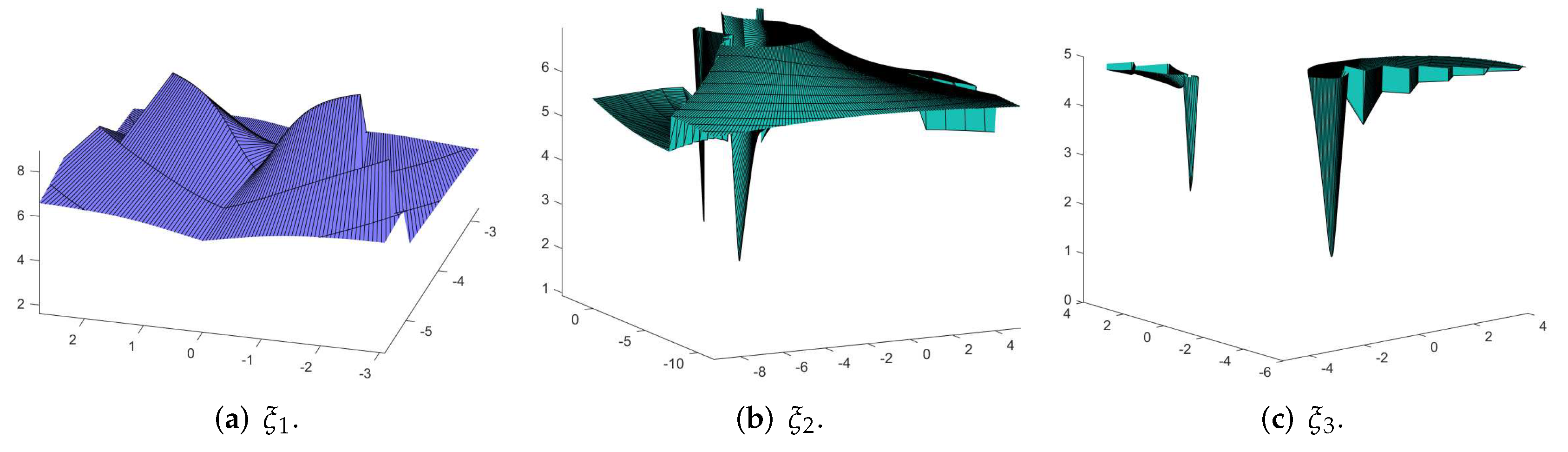
The stability surfaces of the strange fixed points dependent on parameter
k are illustrated in
Figure 3.
Lemma 3. If is the root of defined in (24), then is also a root of for any and any . Proof. As in the proof of Lemma 1, we obtain by direct calculation that , because , proof completed. □
Theorem 6. Let z be a strange fixed point of satisfying . Then, the following holds: Proof. The derivative of
is
. Substituting
into
for
z and knowing from the proof of Lemma 3 that
, eventually, we obtain
. As a result, it continues to check the relation:
By direct computation:
is found. This completes the proof. □
The following lemma depicts how to find the super-attraction point under the strange fixed point of conjugated maps
for some values of
k. We need to concurrently solve
for some values of
k; in this way, the super-attractors of
can be found. We first eliminate the parameter
k from
, resulting in a polynomial over
z with degree 16:
In view of Theorem 6, there are only eight pairs super-attractors denoted by for , the stability of and are the same. Then, after solving for k numerically, we achieve the following Lemma deeming the needed super-attractors:
Lemma 4. Let . Then are super-attractors of , respectively, for eight values of or .
4. Critical Points and Free Critical Points
The critical points of map are defined as the roots of . From this known fact, each basin of attraction contains at least one free critical point. Operator has as critical point 0, ∞ along with the roots of this sixth degree polynomial where 0 and ∞ are related to a and b. Critical points that are different from 0 and ∞ are defined as free critical points. We are interested due to the orbital behavior of the free critical points, and we will deal with the free critical points which depend on parameter k.
Regarding the free critical points, we also divide the study into two parts such as the fixed points. One is to find the corresponding critical points for some special parameter valve k; the other is to find the critical points corresponding to the root of .
In view of Theorem 4, the free critical points for special
k-values can easily be found and shown in
Table 2.
Lemma 5. If is the root of defined in (24), then is also a root of for any and any , that is, hold. Corollary 2. If η is any critical point, then so is .
Proof. According to Theorem 2 (b), let , and under the fact that is conjugated to itself.
To seek
k-dependent free critical points of
, we need to solve
as defined in (
24) for
. Based on Lemma 5,
can be written as second-degree polynomials. As a result,
. We define a function
for the convenience of the following. Then, six roots
of
are the
k-dependent free critical points
of map
given as follows:
where:
□
5. Parameter Spaces and Dynamical Planes
Lemma 6. and hold for any and are given.
Proof. The proof is simple. First, , we chose a topological conjugacy , that is to say, . Then, for a given . Similarly, such that . □
Corollary 3. If is a q-periodic point of Ω, then so is , let be given.
Proof. With the help of Lemma 6, we have . As z is a q-periodic point of , clearly, . Hence, , this shows is also a q-periodic point. □
The above corollary explains whether the orbit of free critical point approaches a q-periodic point of , then the orbit of approaches a q-periodic point for any integer and . This means that only one branch of needs to be considered for its orbit behavior. We naturally define two concepts called the parameter space and dynamical plane for the iterative map as follows:
= {: an orbit of a free critical point tends towards a number v under the action of }.
= {: an orbit of for a given tends towards a number u under the action of }.
We are going to seek the best members of the family by virtue of the parameter space connected with the free critical point
(see [
6]) and dynamic plane.
Now, we analyze the asymptotic behavior of the free critical points of our proposed method family (
2) with the technique [
13]. These free critical points that depend on
k are the roots of polynomial
. For this, we draw the parameter space related to points
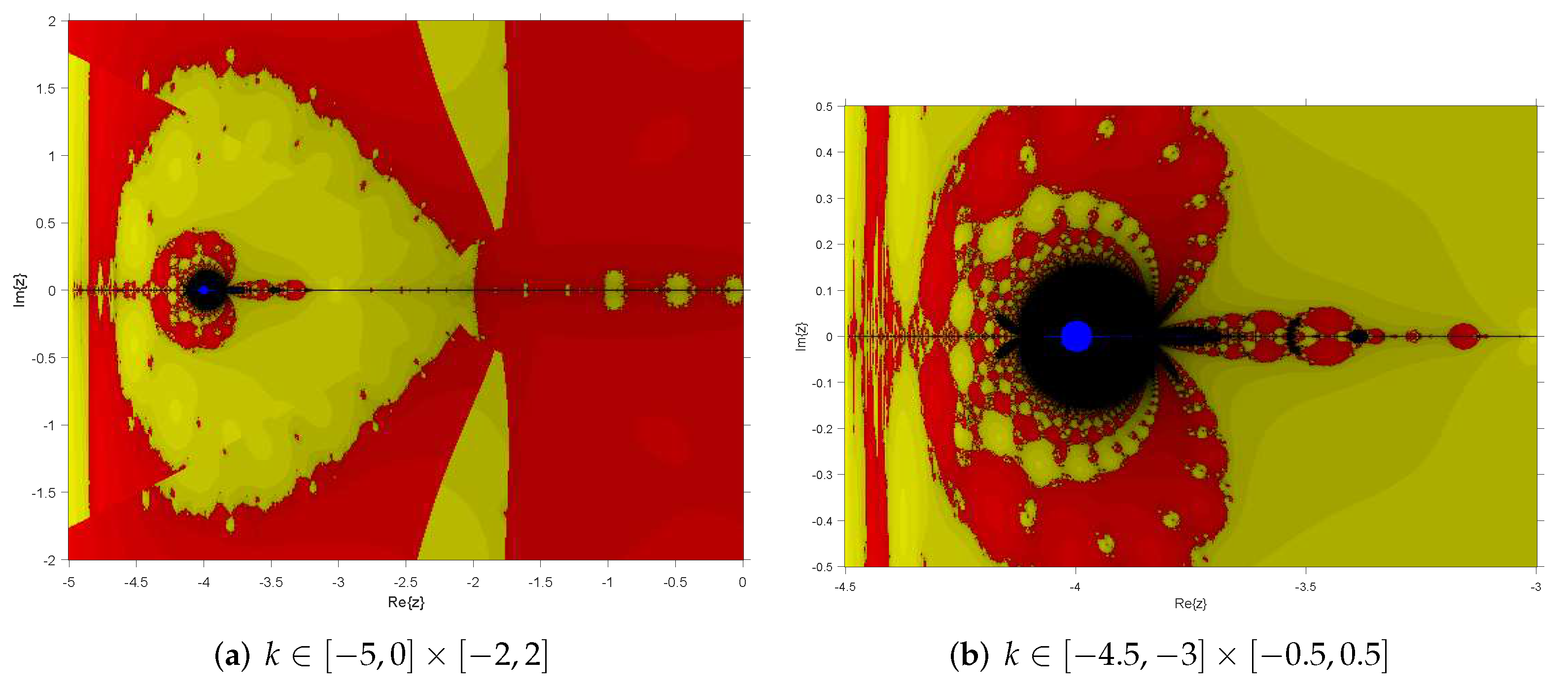
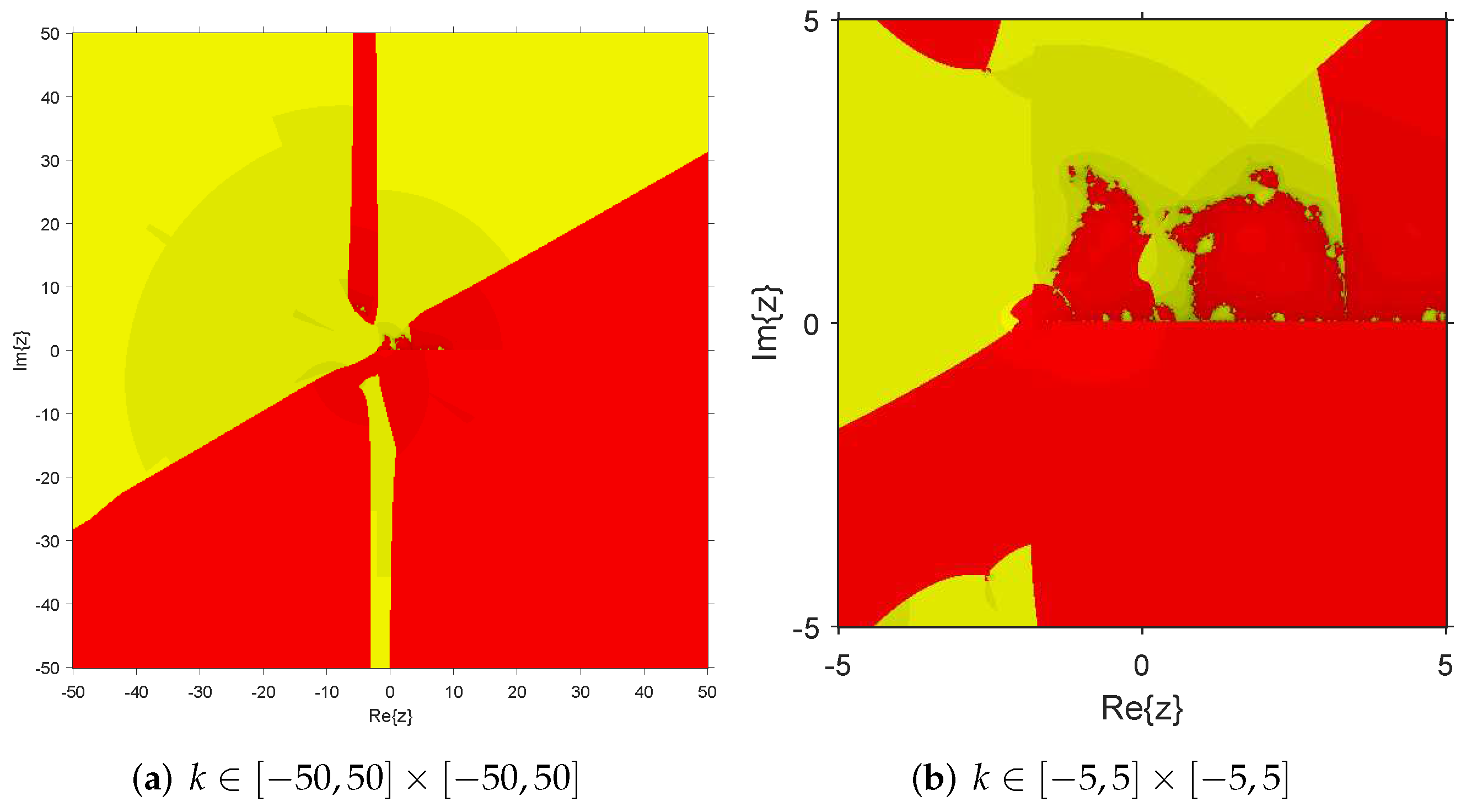
. In the previous analysis, we already know that the free critical points are conjugated, so only three planes need to be drawn. We create a mesh of
points in the complex plane and each point corresponds a different complex parameter value
k. We select
as an initial estimate for iterative schemes (
2) where
k goes through every point in the mesh and set the maximum number of iterations to 50. If the method converges to
, the points are painted in blue; red denotes the convergence of the method to 0 (associated with
a); yellow denotes those points that eventually converge to
∞ (associated with the
b) and they are black in other cases, i.e., they diverge.
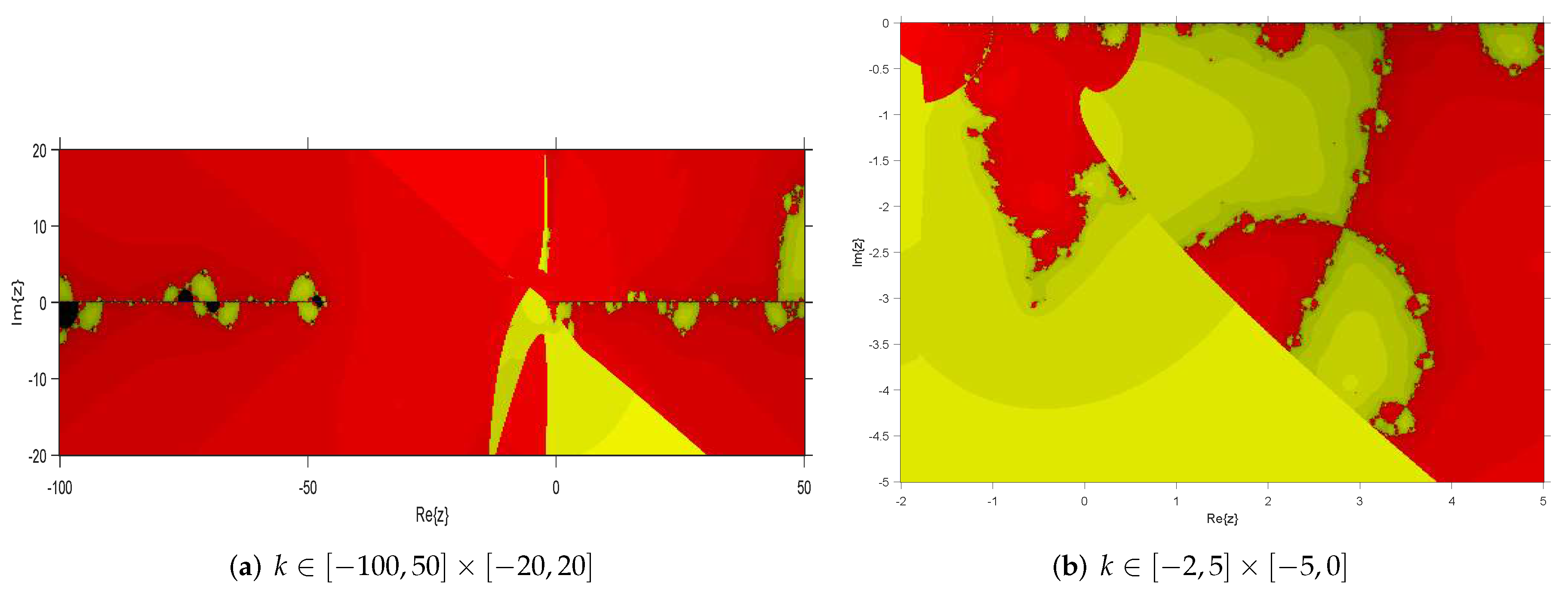
The parameter space related to the free critical points
are obtained in
Figure 4,
Figure 5,
Figure 6 about different intervals.
where
and
are the range of the real and imaginary parts of
k, respectively; (b) is a detail on (a). In
Figure 4b, we observe a small disk (the blue is denoted by D): D corresponds to values of
k for which
is attractive or superattractive. In addition, it is very clear that, except for the red and yellow areas, the other color domains are not the best for the selection of the parameter
k-value in terms of stability. From
Figure 4,
Figure 5,
Figure 6, we see broad regions for red and yellow, suggesting that some members of family (2) are numerically stable. We will analyze the dynamic plane of family (2) with parameter k in the red and yellow areas of
Figure 4,
Figure 5,
Figure 6.
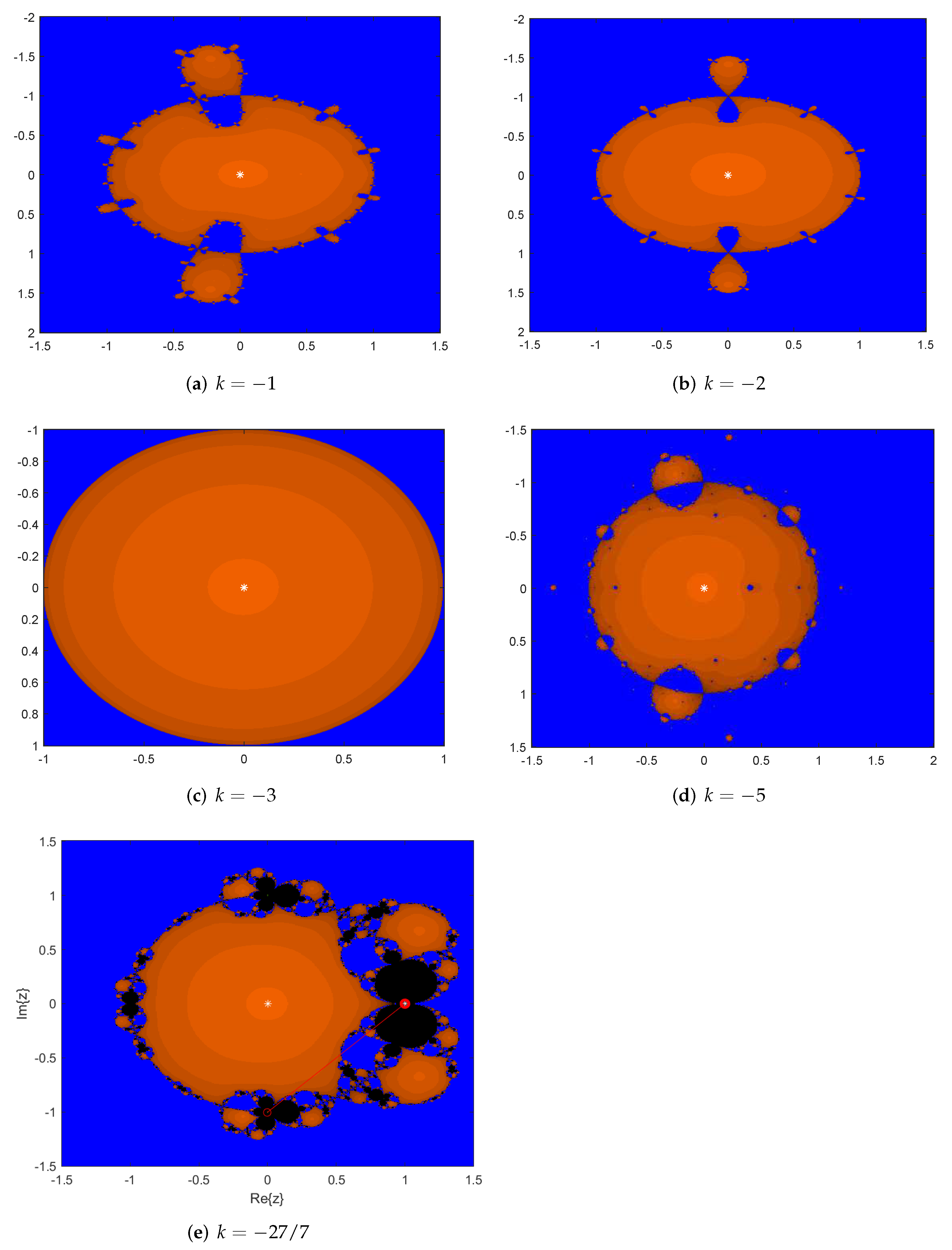
The dynamic plane of the new family (
2) for a given value of
k is presented. Each basin of attraction is painted in a different color: convergence to 0 and
∞ are in orange and blue, respectively; if it converges to the fixed point
then it is in green; black indicates that the point does not converge to any root. We plotted the orbit of a point in red. Similarly to the parametric space, the maximum number of iterations is 50, and these dynamic planes are generated by a mesh of
points.
First of all, we provide dynamical planes for
and
in
Figure 7, respectively. It can be seen that only the black color appears in
Figure 7e. In addition to
Figure 7e, the attraction basins in other planes are only related to
a or
b, which means that
k-values have good convergence properties. In other words, the corresponding members of the Ostrowski-type iterative family (2) are numerically stable.
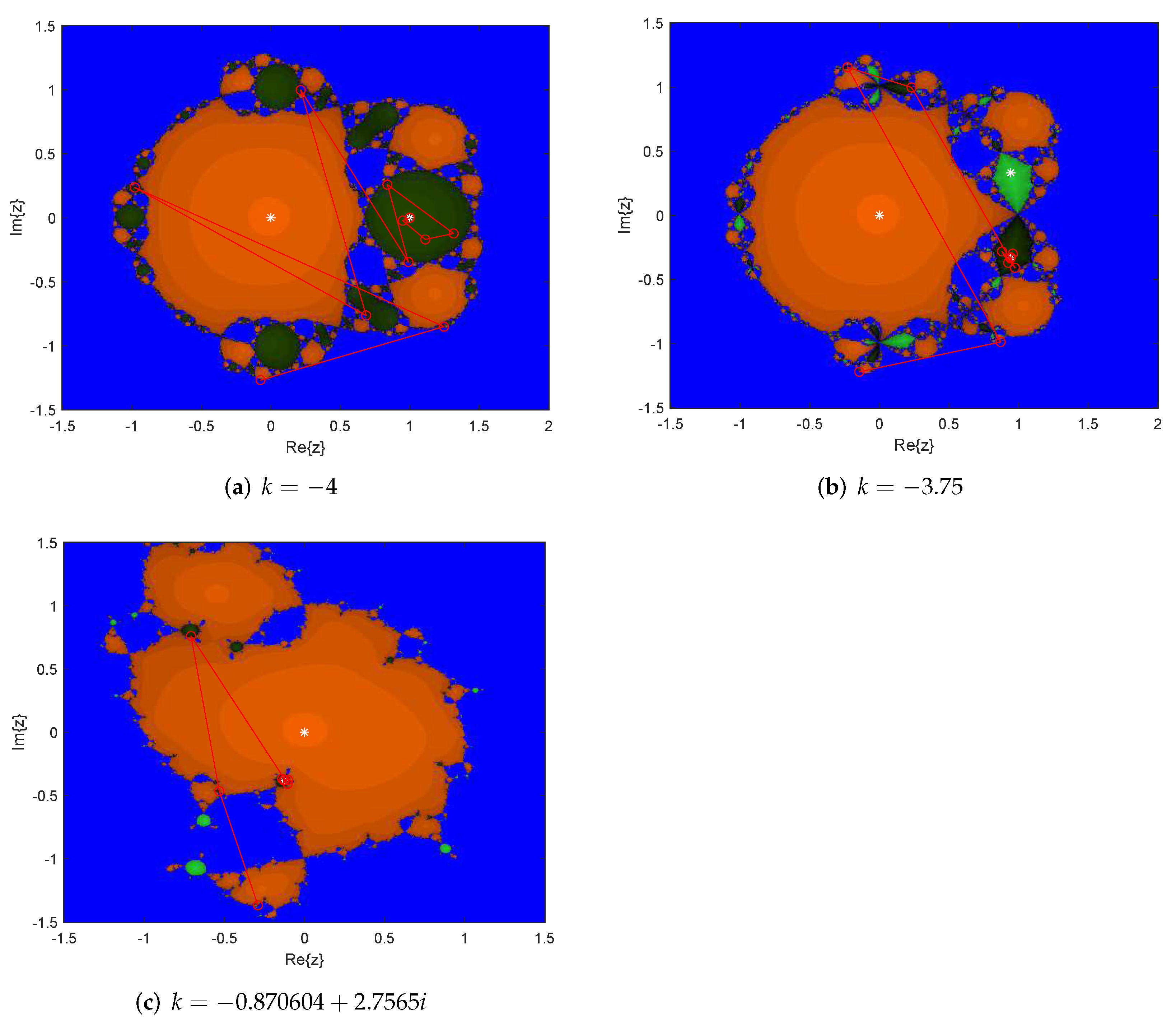
Figure 8 presents the dynamic planes converging to the strange fixed point for
and
. Furthermore, three different basins of attraction appear in each figure.
In
Figure 9, different kinds of unstable behavior can be found.
Figure 9 shows that
is a parabolic fixed point which is consistent with Theorem 5(c) and then it exists in the Julia set but it has its own basin of attraction (black in the figure).
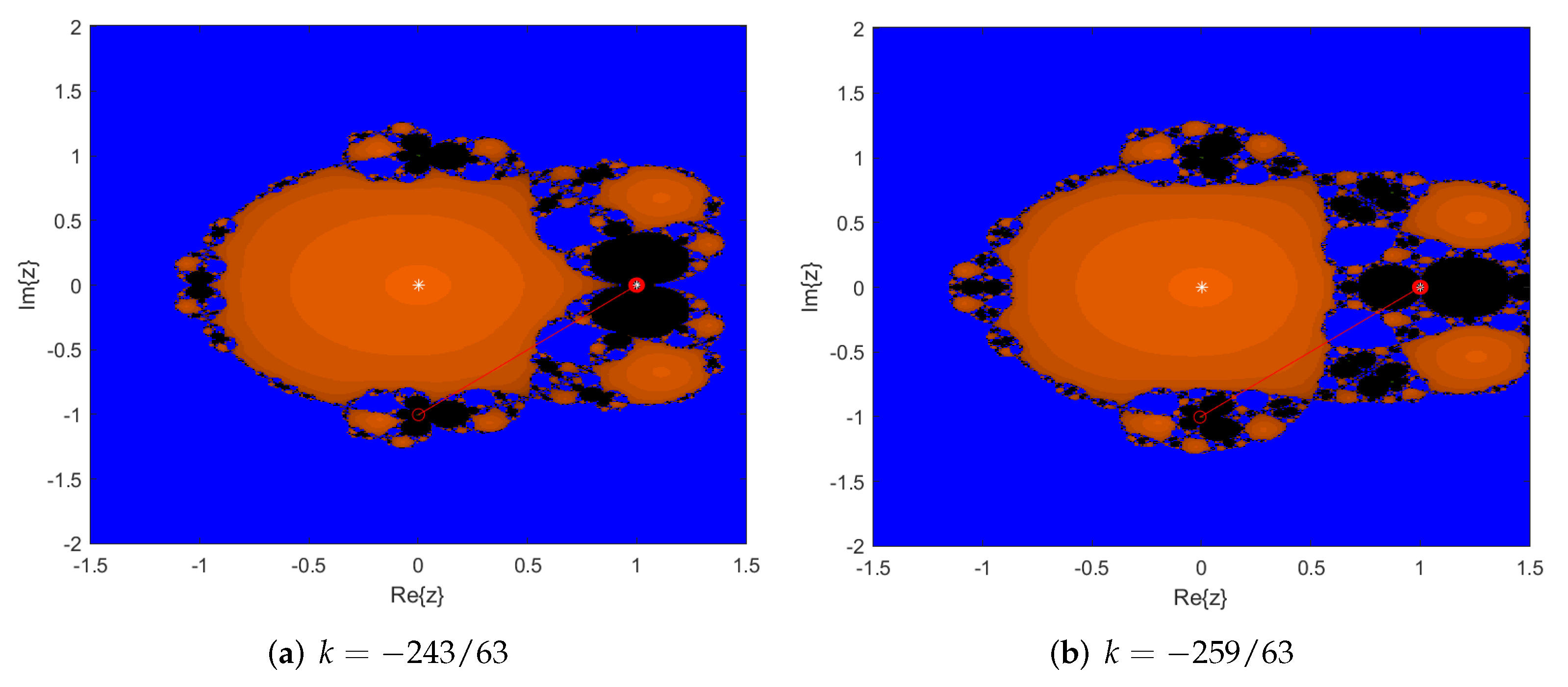
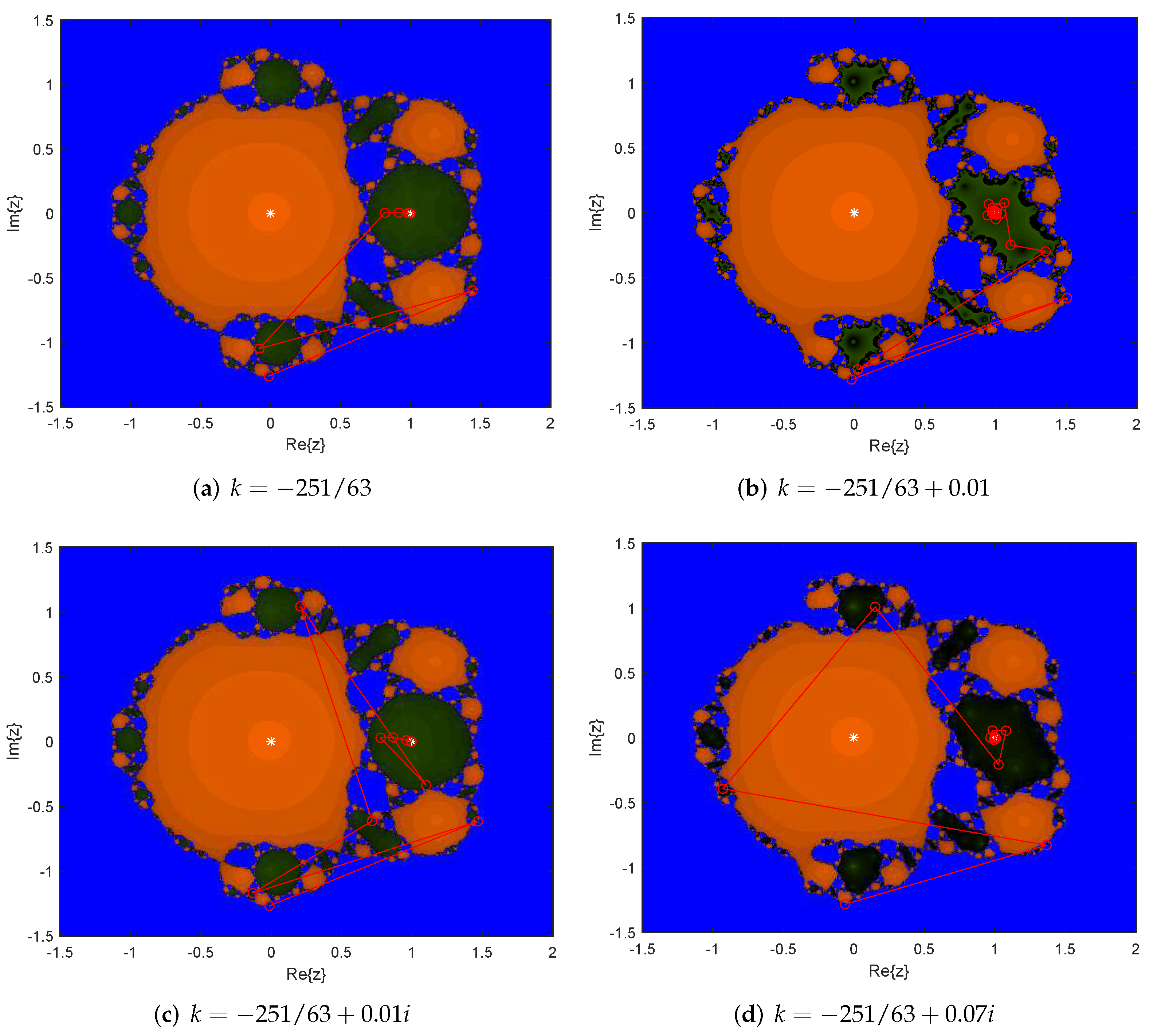
Finally, in
Figure 10a, the dynamical plane of the iterative scheme corresponds to
(the center of circle
S) is shown.
Figure 10b–d are the dynamic planes with respect to the neighborhood of
but still within the circle
S. We find that with
and
as the initial points, respectively, their orbits eventually converge to
, which corresponds to Theorem 5 (b) and Remark 2.
Through the above analysis, we can see that these methods corresponding to
and
outperform the other elements of the Ostrowski-type iterative family (2) in most numerical applications. Furthermore,
is the most stable member due to Cayley’s test [
17].














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}