
Fractional-Order Interval Observer for Multiagent Nonlinear Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
- By investigating the fractional differential problem, a novel fractional-order Lyapunov function is proposed for the boundedness problem in the observer deign, which is an approach to prove that a matrix is Hurwitz.
- 2.
- Different from linear MASs, nonlinear MASs are considered, and the solution for Lipschitz functions is combined with the distributed interval observer design.
- 3.
- For fractional-order MASs, the communication topology is applied to the observer design. Each observer of the corresponding agent could accept the information from its adjacent observers. A novel distributed interval observer was first designed for the fractional-order MASs.
2. Preliminaries
2.1. Fractional Calculus
2.2. Graph Theory
2.3. Fractional-Order Systems
- ,
- ,
- and .
3. Main Results
- 1.
- is Metzler;
- 2.
- The initial condition of (7) satisfies ;
- 3.
- Nonlinear function possesses the features introduced in Properties 3–5.
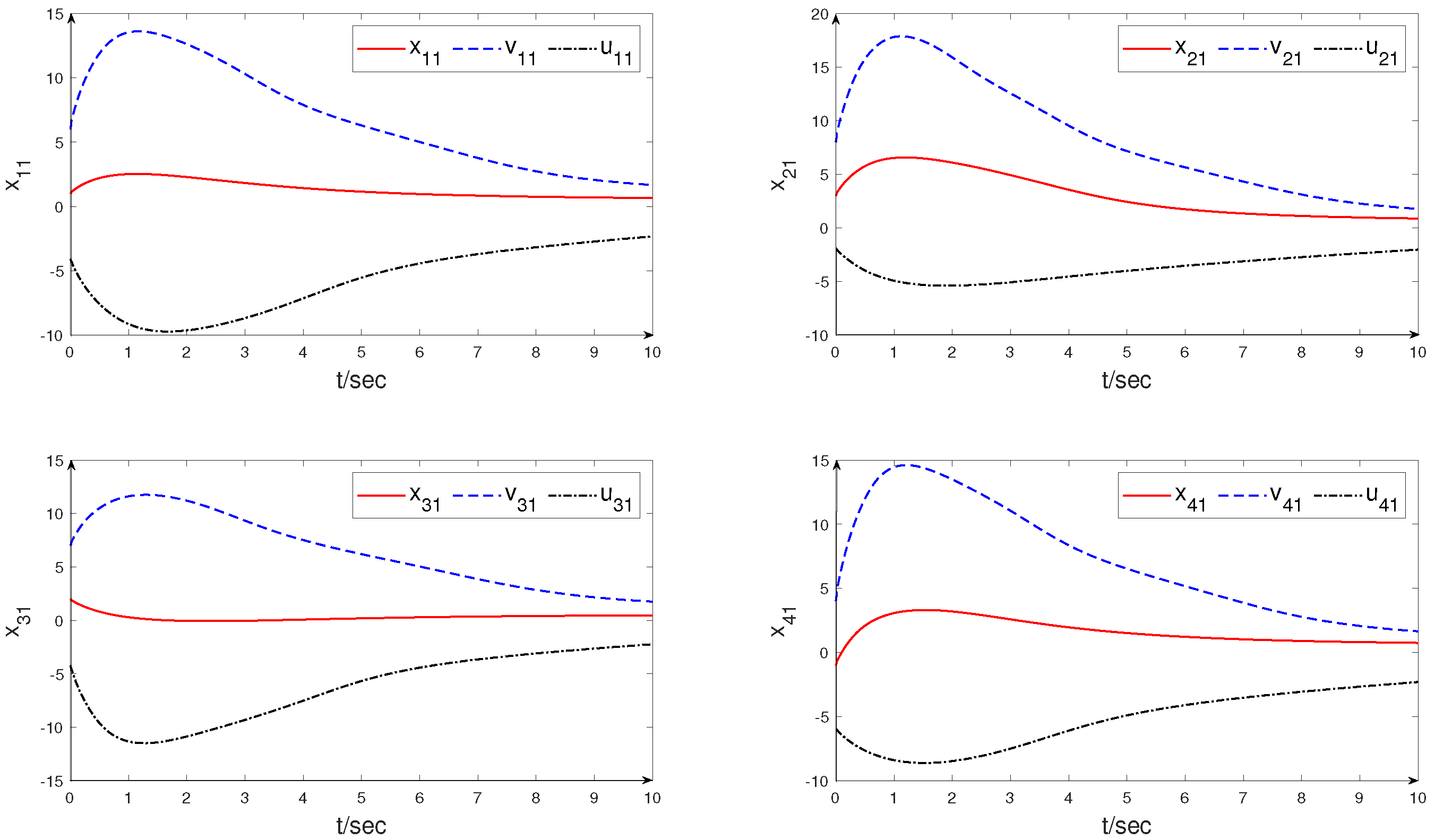
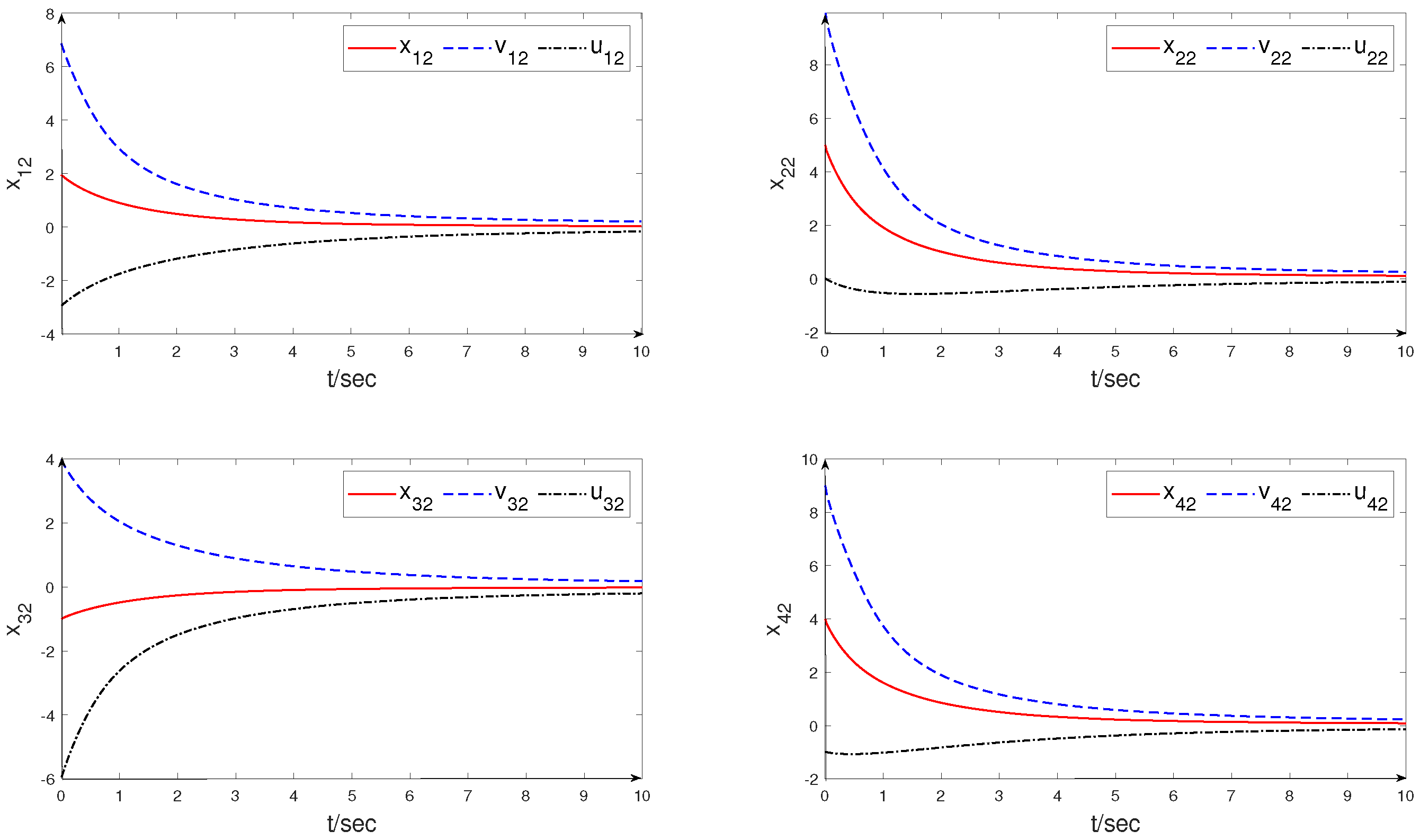
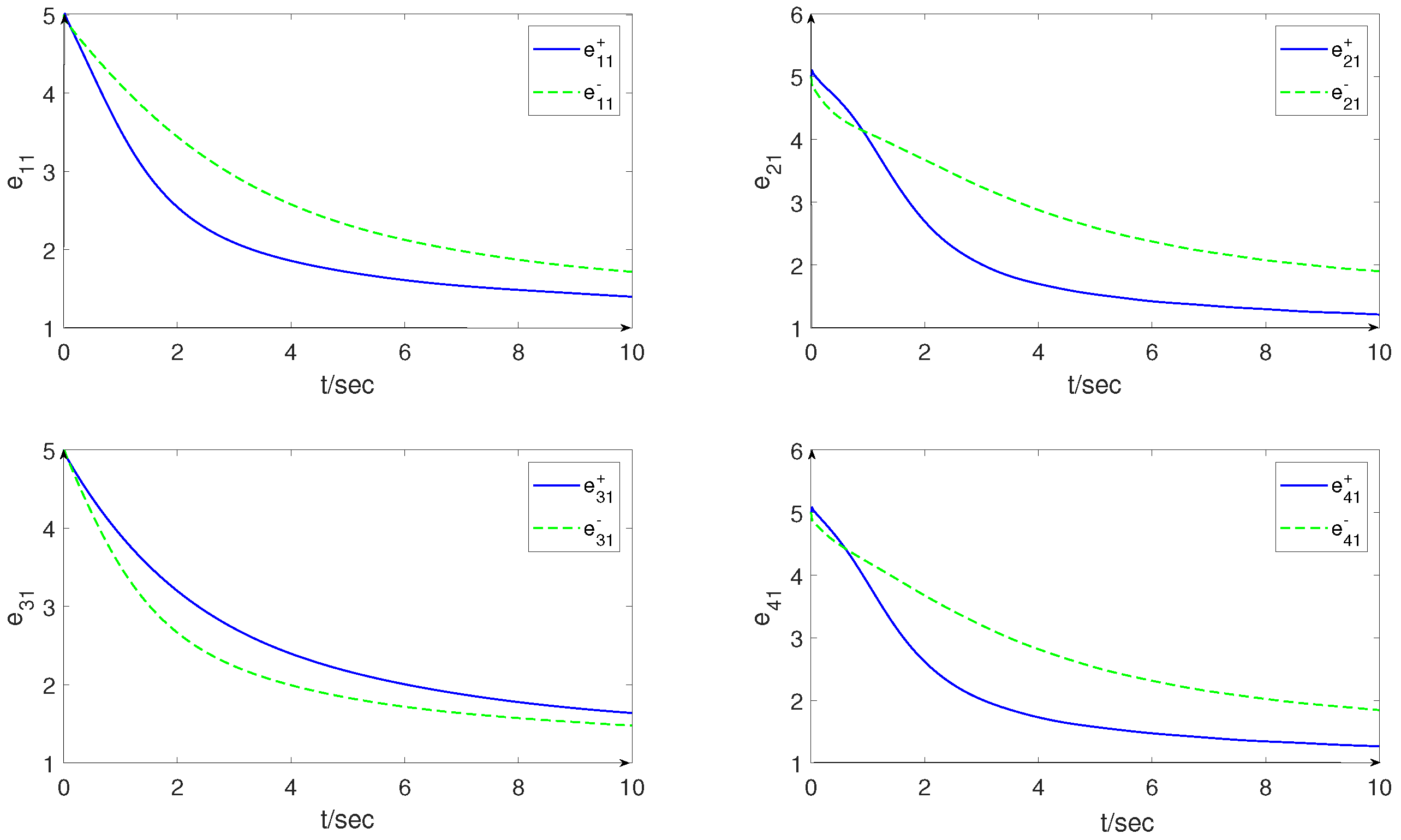
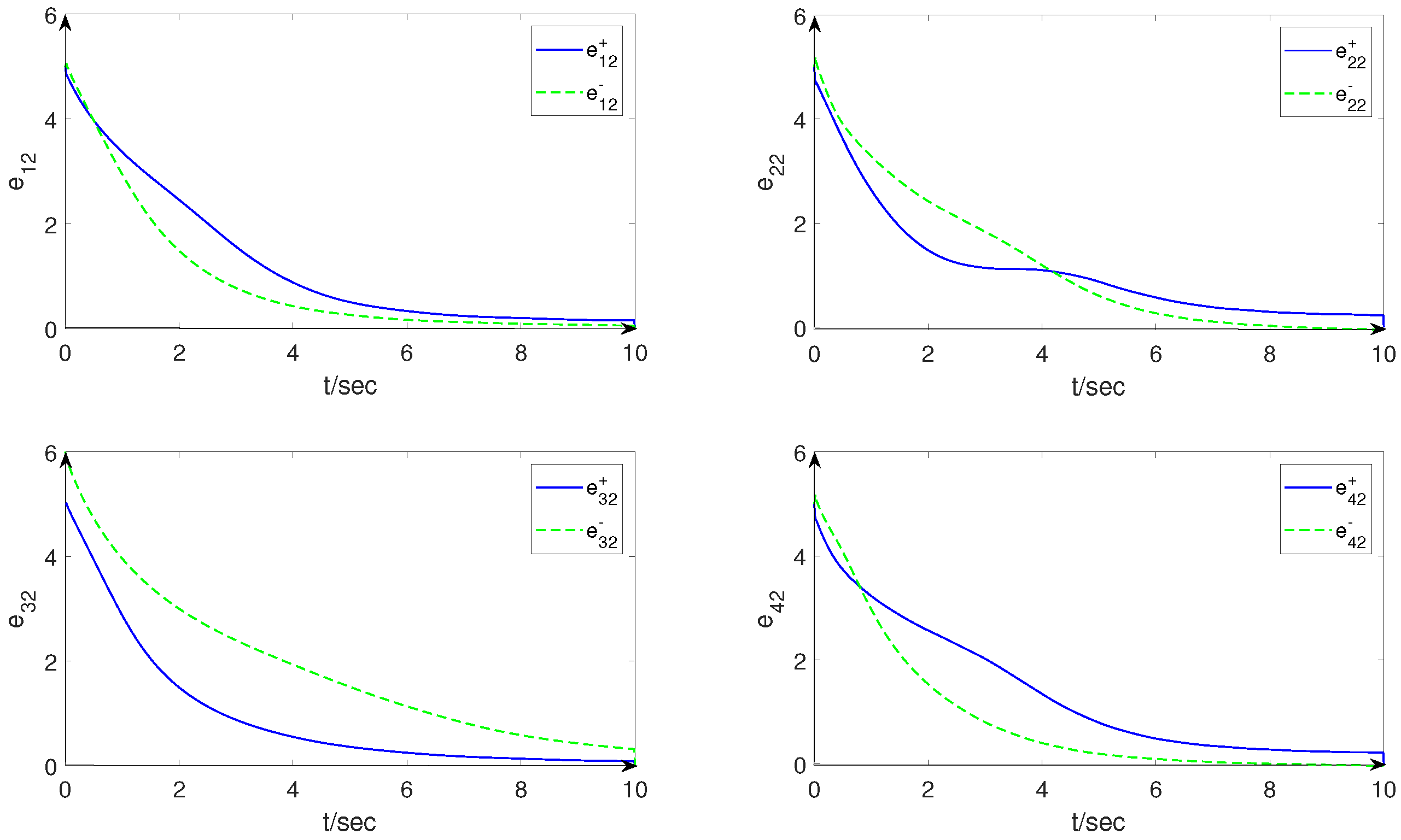
4. Simulation
| Algorithm 1 Distributed interval estimation for fractional-order MASs. |
|
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hartley, T.; Lorenzo, C. Fractional-Order system identification based on continuous order-distributions. Signal Process. 2003, 83, 2287–2300. [Google Scholar] [CrossRef]
- Li, M.; Li, D.; Wang, J.; Zhao, C. Active disturbance rejection control for fractional-order system. ISA Trans. 2013, 52, 365–374. [Google Scholar] [CrossRef] [PubMed]
- Lu, B.; Zhang, Y.; Reeves, D.M.; Sun, H.; Zheng, C. Application of tempered-stable time fractional-derivative model to upscale subdiffusion for pollutant transport in field-scale discrete fracture networks. Mathematics 2018, 6, 5. [Google Scholar] [CrossRef] [Green Version]
- Turab, A.; Mitrović, Z.; Savić, A. Existence of solutions for a class of nonlinear boundary value problems on the hexasilinane graph. Adv. Differ. Equ. 2021; to be published. [Google Scholar] [CrossRef]
- Rezapour, S.; Souid, M.S.; Bouazza, Z.; Hussain, A.; Etemad, S. On the fractional variable order thermostat model: Existence theory on cones via piece-wise constant functions. J. Funct. Space, 2022; to be published. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, B.; Yan, X.; Shen, J. Interval sliding mode observer based incipient sensor fault detection with application to a traction device in China railway high-speed. IEEE Trans. Veh Technol. 2019, 68, 2585–2597. [Google Scholar] [CrossRef]
- Huang, J.; Ma, X.; Che, H.; Han, Z. Further result on interval observer design for discrete-time switched systems and application to circuit systems. IEEE Trans. Circuits Syst. II-Express Briefs 2019, 67, 2542–2546. [Google Scholar] [CrossRef]
- Gouzé, J.; Rapaport, A.; Hadj-Sadok, M. Interval observers for uncertain biological systems. Ecol. Modell. 2000, 133, 45–56. [Google Scholar] [CrossRef]
- Mazenc, F.; Bernard, O. Interval observers for linear time-invariant systems with disturbances. Automatica 2011, 47, 140–147. [Google Scholar] [CrossRef] [Green Version]
- Raïssi, T.; Efimov, D.; Zolghadri, A. Interval state estimation for a class of nonlinear systems. IEEE Trans. Autom. Control 2011, 57, 260–265. [Google Scholar] [CrossRef]
- Dinh, T.N.; Marouani, G.; Raïssi, T.; Wang, Z.; Messaoud, H. Optimal interval observers for discrete-time linear switched systems. Int. J. Control 2020, 93, 2613–2621. [Google Scholar] [CrossRef]
- Huang, J.; Che, H.; Raïssi, T.; Wang, Z. Functional interval observer for discrete-time switched descriptor systems. IEEE Trans. Autom. Control 2021, 67, 2497–2504. [Google Scholar] [CrossRef]
- Xu, F.; Yang, S.; Wang, X. A novel set-theoretic interval observer for discrete linear time-invariant systems. IEEE Trans. Autom. Control 2021, 66, 773–780. [Google Scholar] [CrossRef]
- Cai, H.; Lewis, F.L.; Hu, G.; Huang, J. The adaptive distributed observer approach to the cooperative output regulation of linear multi-agent systems. Automatica 2017, 75, 299–305. [Google Scholar] [CrossRef]
- Han, W.; Trentelman, H.; Wang, Z.; Shen, Y. A simple approach to distributed observer design for linear systems. IEEE Trans. Autom. Control 2018, 64, 329–336. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Yang, M.; Zhang, Y.; Zhang, M. Consensus control of multi-agent systems with P-one-sided Lipschitz. ISA Trans. 2022, 125, 42–49. [Google Scholar] [CrossRef]
- Li, C.; Yu, X.; Liu, Z.W.; Huang, T. Asynchronous impulsive containment control in switched multi-agent systems. Inf. Sci. 2016, 370, 667–679. [Google Scholar] [CrossRef]
- Hua, C.; You, X.; Guan, X. Leader-Following consensus for a class of high-order nonlinear multi-agent systems. Automatica 2016, 73, 138–144. [Google Scholar] [CrossRef]
- Chen, D.; Liu, G. A networked predictive controller for linear multi-agent systems with communication time delays. J. Frankl. Inst. 2020, 357, 9442–9466. [Google Scholar] [CrossRef]
- Hong, Y.; Chen, G.; Bushnell, L. Distributed observers design for leader-following control of multi-agent networks. Automatica 2008, 44, 846–850. [Google Scholar] [CrossRef]
- Liu, T.; Huang, J. A distributed observer for a class of nonlinear systems and its application to a leader-following consensus problem. IEEE Trans. Autom. Control 2018, 44, 1221–1227. [Google Scholar] [CrossRef]
- Yu, Z.; Jiang, H.; Hu, C. Leader-Following consensus of fractional-order multi-agent systems under fixed topology. Neurocomputing 2015, 149, 613–620. [Google Scholar] [CrossRef]
- Li, Z.; Gao, L.; Chen, W.; Xu, Y. Distributed adaptive cooperative tracking of uncertain nonlinear fractional-order multi-agent systems. IEEE-CAA J. Automatic. 2016, 47, 222–234. [Google Scholar] [CrossRef]
- Zhu, W.; Li, W.; Zhou, P.; Yang, C. Consensus of fractional-order multi-agent systems with linear models via observer-type protocol. Neurocomputing 2017, 230, 60–65. [Google Scholar] [CrossRef]
- Gong, Y.; Wen, G.; Peng, Z.; Huang, T.; Chen, Y. Observer-Based time-varying formation control of fractional-order multi-agent systems with general linear dynamics. IEEE Trans. Circuits Syst. II-Express Briefs 2019, 67, 82–86. [Google Scholar] [CrossRef]
- Wen, G.; Zhang, Y.; Peng, Z.; Yu, Y.; Rahmani, A. Observer-Based output consensus of leader-following fractional-order heterogeneous nonlinear multi-agent systems. Int. J. Control 2020, 93, 2516–2524. [Google Scholar] [CrossRef]
- Afaghi, A.; Ghaemi, S.; Ghiasi, A.; Badamchizadeh, M. Adaptive fuzzy observer-based cooperative control of unknown fractional-order multi-agent systems with uncertain dynamics. Soft Comput. 2020, 24, 3737–3752. [Google Scholar] [CrossRef]
- Danca, M.; Kuznetsov, N. Matlab code for Lyapunov exponents of fractional-order systems. Int. J. Bifurc. Chaos 2018, 28, 1850067. [Google Scholar] [CrossRef] [Green Version]
- Tian, X.; Yang, Z. Adaptive stabilization of a fractional-order system with unknown disturbance and nonlinear input via a backstepping control technique. Symmetry 2019, 12, 55. [Google Scholar] [CrossRef] [Green Version]
- Huong, D. Design of functional interval observers for non-linear fractional-order systems. Asian J. Control 2020, 22, 1127–1137. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional derivatives and integrals. In Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: San Diego, CA, USA, 1998; pp. 41–80. [Google Scholar]
- Tavazoei, M.; Haeri, M. A note on the stability of fractional order systems. Math. Comput. Simul. 2009, 79, 1566–1576. [Google Scholar] [CrossRef]
- Kamal, S.; Sharma, R.K.; Dinh, T.N.; Ms, H.; Bandyopadhyay, B. Sliding mode control of uncertain fractional-rder systems: A reaching phase free approach. Asian J. Control 2021, 23, 199–208. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M.; Kurths, J. Second-Order consensus for multiagent systems with directed topologies and nonlinear dynamics. IEEE Trans. Syst. Man Cybern. Syst. 2009, 40, 881–891. [Google Scholar]
- Moisan, M.; Bernard, O. Robust interval observers for global Lipschitz uncertain chaotic systems. Syst. Control Lett. 2010, 59, 687–694. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.; Gallegos, J. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Huang, J.; He, S. Fractional-Order Interval Observer for Multiagent Nonlinear Systems. Fractal Fract. 2022, 6, 355. https://doi.org/10.3390/fractalfract6070355
Zhang H, Huang J, He S. Fractional-Order Interval Observer for Multiagent Nonlinear Systems. Fractal and Fractional. 2022; 6(7):355. https://doi.org/10.3390/fractalfract6070355
Chicago/Turabian StyleZhang, Haoran, Jun Huang, and Siyuan He. 2022. "Fractional-Order Interval Observer for Multiagent Nonlinear Systems" Fractal and Fractional 6, no. 7: 355. https://doi.org/10.3390/fractalfract6070355
APA StyleZhang, H., Huang, J., & He, S. (2022). Fractional-Order Interval Observer for Multiagent Nonlinear Systems. Fractal and Fractional, 6(7), 355. https://doi.org/10.3390/fractalfract6070355