1. Introduction
In recent years there has been a great deal of interest in generalisations of derivatives defined through operators, involving convolutions, of the form
and
where
is a suitably defined kernel, see for example [
1] and references therein. If the kernel is given by
then Equation (
1) defines the Riemann–Liouville fractional derivative of order
and Equation (
2) defines the Caputo fractional derivative of order
(see for example [
2]). Here,
, although we may also consider this to be the distributional derivative of a generalized function below. The kernel in Equation (
3) is singular at
, viz
in Equations (
1) and (
2), so that the integral in these definitions is an improper integral in this case, but it is bounded whenever
is bounded on
, since
is locally integrable on
. Some researchers define
where
and some also take the lower limit in the integral as
[
3].
There has been a growing interest in defining new operators along the lines of Equations (
1) and (
2) with
non-singular in
. For example, if
then Equation (
2) defines a Caputo–Fabrizio (CF) operator of order
[
4,
5]. If
where
is the Mittag–Leffler function, then Equation (
2) defines an Atangana–Baleanu–Caputo (ABC) operator of order
[
6]; and Equation (
1) defines an Atangana–Baleanu–Riemann (ABR) operator of order
[
6]. These operators with non-singular kernels have found widespread use in modelling applications, typically with integer order derivatives replaced with the fractional order operators. The main argument for their introduction has been that it provides a memory affect without possible problems from a singularity at the origin. However, the memory aspect and the fractional calculus aspect of these operators, with these non-singular kernels, has been challenged [
7,
8,
9].
In modelling applications, there is interest in initial value problems (IVPs) of the form
and
where
and
are right-continuous for
and differentiable for
. Here,
and
are expected to be known functions and we solve for
, which is specified at
. We refer to IVPs of the form Equation (
10) as generalized Caputo type IVPs and those of the form Equation (
9) as generalized Riemann–Liouville type IVPs.
In recent work, we considered IVPs of the form of Equation (
10) with
given by the CF operator, or the ABC operator, and we showed that, in general, these problems have solutions that are discontinuous at
[
10]. Here, we have extended this work to show that the problems formulated in Equations (
9) and (
10), with non-singular kernels, in general, have solutions that are discontinuous at the origin. This includes the case with
given by the ABR operator. As a corollary, we showed that it is possible to re-formulate these IVPs with non-singular kernels to provide solutions that are continuous for
, but this introduces additional constraints on the system. Consideration of these results is important for modelling applications that would seek to employ these IVPs.
We note that the IVPs in Equations (
9) and (
10) can be formulated as Volterra integral equations of the first kind and there has been a series of papers written on the existence of generalized solutions for these problems in cases where continuous solutions cannot be obtained (see, for example, [
11,
12]). The results that we have provided are related to this work. Note especially that the Volterra integral equation
must have
if
and
are classical functions. However, solutions for
are possible with
if
is a generalized function and if the integral is also interpreted in a generalized sense. It is important to include such generalized function solutions in modelling applications with Equation (
11) because, while
is defined by Equation (
11),
is not, so that
may be non-zero. For a useful reference on generalized functions and distributional derivatives see, for example, [
13], and references there-in.
The remainder of this paper is organized as follows. In
Section 2, we consider generalized Caputo type IVPs with non-singular kernels, and
, and we prove that these problems have solutions that are discontinuous at the origin if
but continuous at the origin if
. In
Section 3, we consider generalized Riemann–Liouville type IVPs, with non-singular kernels, and
, and we prove that these problems have solutions that are discontinuous at the origin if
but continuous at the origin if
. In this section, we also consider a different generalized Riemann–Liouville type IVP, with non-singular kernels, and
, where the initial value
is replaced by the right-hand limit,
. The solutions to this problem are discontinuous at the origin if
but continuous at the origin if
. However, the form of the solution is very different to that which would be obtained by simply replacing
with
in the generalized Riemann–Liouville type IVP considered earlier. In
Section 4, we provide examples that illustrate each of the theorems. We conclude with a Discussion and Summary in
Section 5.
Many of our results are framed in terms of Laplace transforms with the following notation:
or
is used to denote the Laplace transform of a function
with respect to
t, with Laplace transform variable
s;
is used to denote the inverse Laplace transform of a function
. The Laplace transform
exists if
is bounded of exponential order, i.e., there exists real valued parameters
such that
and is piecewise continuous with, at most, a finite number of discontinuities. The inverse Laplace transform
exists if
, and
is finite.
2. Caputo Type IVPs with Non-Singular Kernels
We begin with a consideration of Caputo type IVPs.
Definition 1. Suppose that; and are real-valued and bounded functions, continuous for and differentiable for ; and is a real-valued differentiable function, or generalized function that is differentiable in a distributional sense. Then a Caputo type IVP (C-IVP) is defined by the integro-differential equationand the initial value with . Before considering the construction of the solution to the general IVP, it is enlightening to show the special case where the solution is right-continuous. This lemma will be useful to the proof of the later theorem.
Lemma 1. The solution of a C-IVP (Definition 1), with and , is given byand is right-continuous at . Proof. We first note that the Laplace transforms
and
both exist and
and
We now take the Laplace transform of Equation (
13) to write
The results in Equations (21) and (22) ensure that exists and is right-continuous at . □
Considering the more general case where we can find solutions of the IVP that are not right-continuous at the origin.
Theorem 1. The solution of a C-IVP (Definition 1), with , is given bywhere is the Heaviside function defined in Equation (5). Proof. The proof follows by assuming the solution exists in the form of an ansatz, which is shown to be consistent via direct substitution into the IVP. We begin by taking an ansatz solution of the form
where
is right-continuous at
and differentiable for
and
a is a real-valued constant. We then note
and
where
is the Dirac delta generalized function. Substitution of the ansatz solution into Equation (
13) now yields
To find an explicit expression for the constant
a we consider
where the integral over classical functions vanishes. Thus, we require
Substituting this expression for
a into Equation (
27) gives
where
It is noticed that Equation (
29) is of the same form as Equation (
13) with
replaced by
and
. Hence, we can utilize Lemma 1 to find
Thus, the final result, given by Equation (
23), is then obtained by substituting Equations (
28) and (
31) into Equation (
24). □
As an interesting exercise, an alternate proof of this theorem is given in
Appendix A. It is interesting to note that the solution to the IVP with two different initial conditions will only differ by a constant. Another interesting special case occurs when the right-hand side of the equation and the kernel are equal.
Corollary 1. The solution of a C-IVP (Definition 1) for the special case in which is given bywhere is the Heaviside function defined in Equation (5). We should note that it is always possible to obtain continuous solutions by the addition of a function on the right-hand side of the IVP that is equal to when . As an example, we could consider the case below.
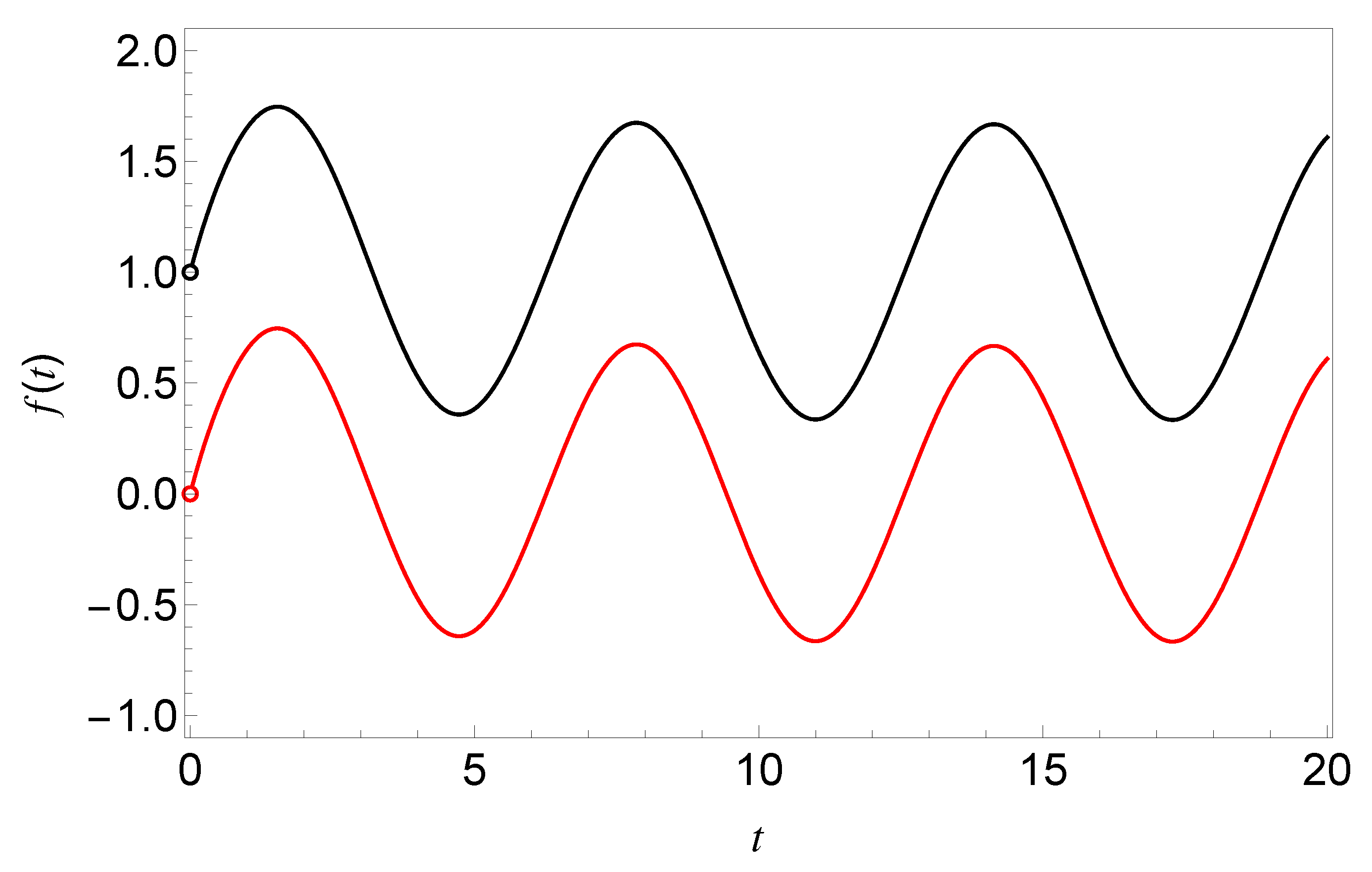
Corollary 2. Suppose that; and are real-valued and bounded functions, continuous for and differentiable for ; ; and . Thenhas a continuous and bounded solution for given by Examples of Caputo type IVPs and their solutions are given in
Section 4. In general, we see that the non-singular kernel necessitates that the solution be discontinuous at
. This needs to be kept in mind for any application of these type of IVPs in modelling situations and otherwise.
3. Riemann–Liouville Type IVPs with Non-Singular Kernels
Next, we will consider the solutions to Riemann–Liouville type IVPs. We again begin with a definition.
Definition 2. Suppose that; and are real-valued and bounded functions, continuous for and differentiable for ; and is a real-valued differentiable function, or generalized function that is differentiable in a distributional sense. Then a Riemann–Liouville type IVP of the first kind (RLI-IVP) is defined by the integro-differential equationand the initial condition with . It is helpful to first consider the special case where the IVP gives right-continuous solutions at the origin. Note that the condition here differs from the required condition on the right-hand side used in Lemma 1.
Lemma 2. The solution of a RLI-IVP (Definition 2), with and , is given byand is right-continuous at . Proof. We first take the Laplace transform of Equation (
35) to write
The results in Equations (42) and (
43) ensure that
exists and is right-continuous at
. □
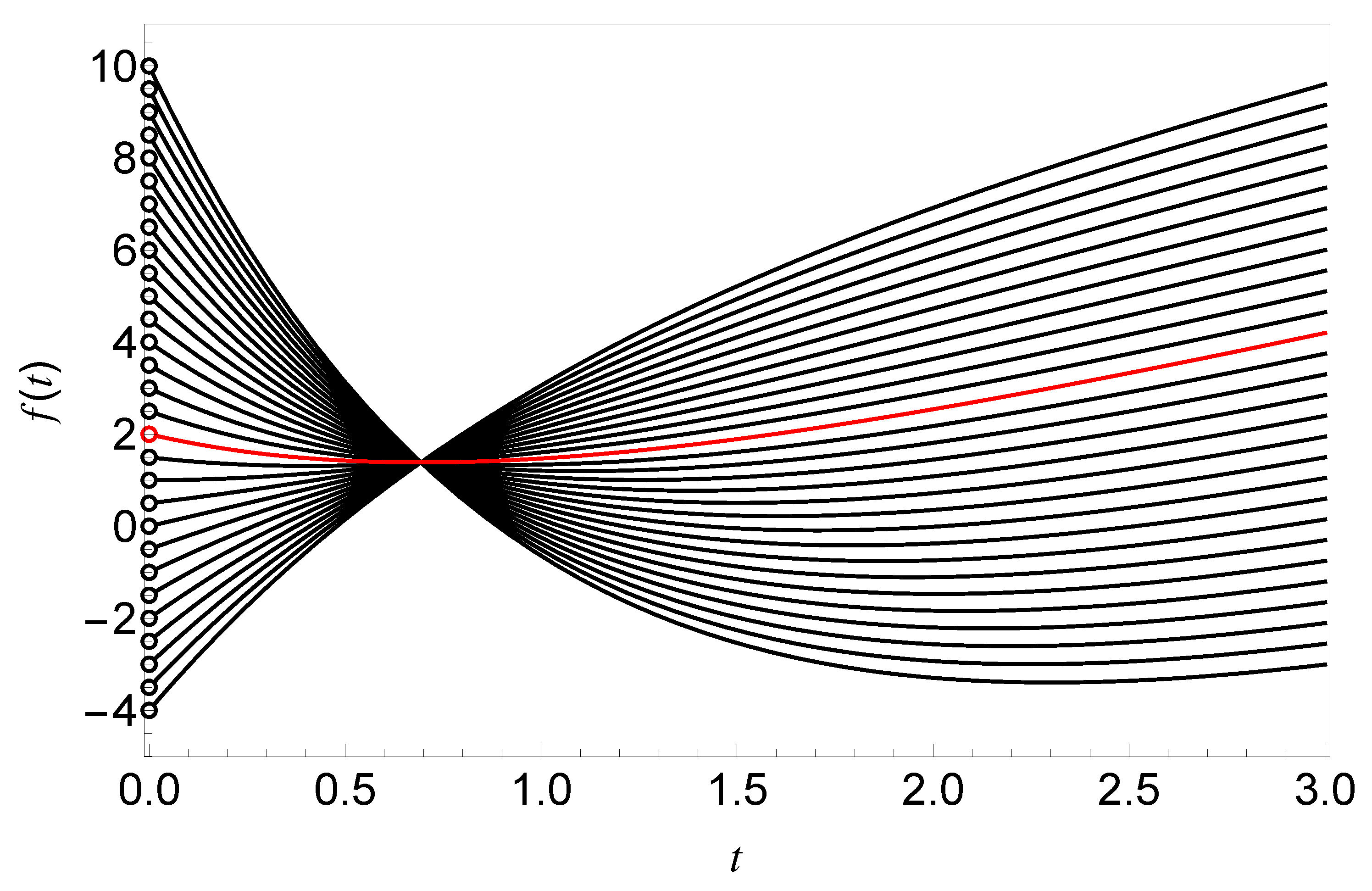
The general case again will display a discontinuity at the origin. It is interesting to note that as is varied the solution only shifts at .
Theorem 2. The solution of a RLI-IVP (Definition 2), with , is given bywhere is the Heaviside function defined in Equation (5). Proof. The proof relies on establishing a relationship between Equations (
13) and (
35) and then utilizing Theorem 1. By interchanging the order of functions in the convolution and applying Leibniz rule for differentiation under the integral sign, we can write
We now use the result of Equation (47) in Equation (
35) and rearrange terms to re-write this as
where
. It is noticed that this equation is of the same form as Equation (
13) but with
replaced by
. The final result, given by Equation (
44), is then obtained by applying Theorem 1 to Equation (
48). □
As an interesting exercise, an alternate proof of this theorem is given in
Appendix A. The initial condition of the IVP only changes the solution at
. For
, with given functions
K and
G, the solutions are identical for all values of
. Similarly to the Caputo type case the special case where the kernel and right-hand side of the IVP are equal gives an interesting solution.
Corollary 3. The solution of a RLI-IVP (Definition 2) for the special case in which is given bywhere is the Heaviside function defined in Equation (5). It is always possible to obtain continuous solutions to the IVP by the addition of a function on the right-hand side of the IVP that is equal to when . An example is given below.
Corollary 4. Suppose that; and are real-valued and bounded functions, continuous at and differentiable for ; ; and . Thenhas a continuous and bounded solution for given by In IVPs with continuous solutions, giving the initial condition as either or will be equivalent. This is not the case for either the Caputo or Riemann–Liouville type IVPs in general. Most interestingly, we find that the solution to Riemann–Liouville IVPs will propagate as a functional form of t. To find the solutions with this alternate form of initial condition, we will first define an alternate form to the IVP.
Definition 3. Suppose that; and are real-valued and bounded functions, continuous for and differentiable for ; and is a real-valued differentiable function, or generalized function that is differentiable in a distributional sense. Then a Riemann–Liouville type IVP of the second kind (RLII-IVP) is defined by the integro-differential equationand the limiting condition with . Similar to the previous theorems, we see that the general case will display a discontinuity at the origin.
Theorem 3. The solution of a RLII-IVP (Definition 3), with , is given bywhere is the Dirac delta generalized function. Proof. The proof follows in a similar manner to that for Theorem 1. We begin by taking an ansatz solution of the form
where
is right-continuous at
and differentiable for
and
b is a real-valued constant. We then note
, or equivalently,
. Substitution of the ansatz solution into Equation (
52) gives
To find an explicit expression for the constant
b we consider the limit
and employ the initial value theorem to find that the integral over classical functions gives
Substituting this expression for
b into Equation (
55) yields
where
It is noticed that Equation (
58) is of the same form as Equation (
35) with
replaced by
and
. Since
is is right-continuous at
, we know that the initial and limiting condition are equal. Hence, we can utilize Lemma 2 to find
Thus, the final result, given by Equation (
53), is then obtained by substituting Equations (
57) and (
60) into Equation (
54). □
As an interesting exercise, an alternate proof of this theorem is given in
Appendix A. Again we can modify the IVP to ensure that solutions are continuous by the addition of a function on the right-hand side that is equal to
when
. An example of this is given below.
Corollary 5. Suppose that; and are real-valued and bounded functions, continuous for and differentiable for ; ; and . Thenhas a continuous and bounded solution for given by 






{kind=link}
{kind=link}