


On Exact Solutions of Some Space–Time Fractional Differential Equations with M-truncated Derivative


Abstract
:1. Introduction
2. The Fundamental Concepts of the M-truncated Derivative and Algorithm of the Extended G/G Method
2.1. The Basic Concepts of the M-Truncated Derivative
2.2. Description of the Extended G/G Method
- It is presumed that the formal solution to (5) is the following:where is the real constant to be determined, and N is a positive integer that needs to be calculated. The following auxiliary linear ordinary differential equation has a similar solution as the function:where and are the real constants to be calculated.
- The system of algebraic equations is obtained by using (7) to substitute (6) into (5) and setting all of the coefficients for powers of to zero. Using Maple and similar software, this algebraic system can be solved in order to determine the values of the unknown constants . Using (5), the value of N may be calculated in the following way, where is the degree of :
- The necessary exact solutions can be obtained in the following three cases using the general solution of (7).Case 1. If , thenCase 2. If , thenCase 3. If , thenThe exact solutions to (5) are obtained, where and are arbitrary constants.
3. Mathematical Analysis
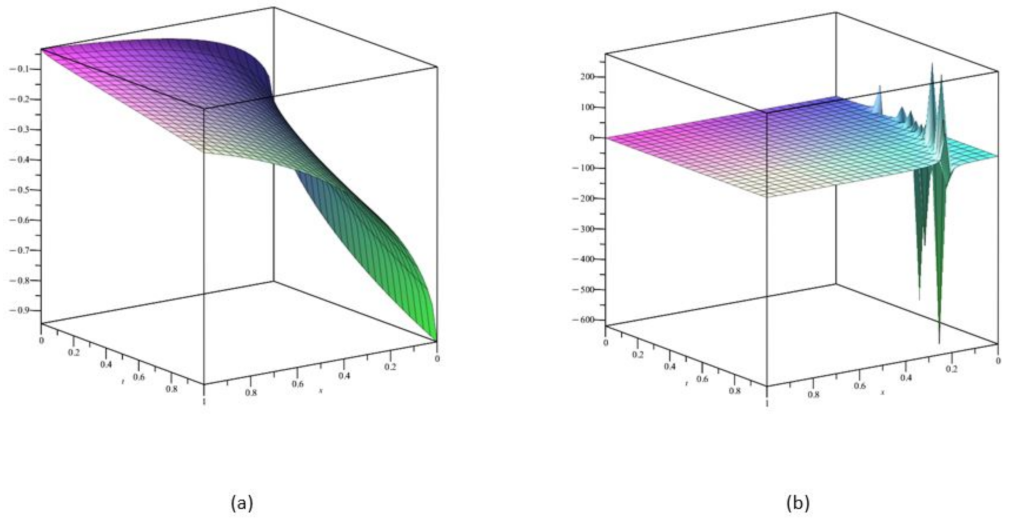
3.1. The Space–Time Fractional Burger-Like Equation
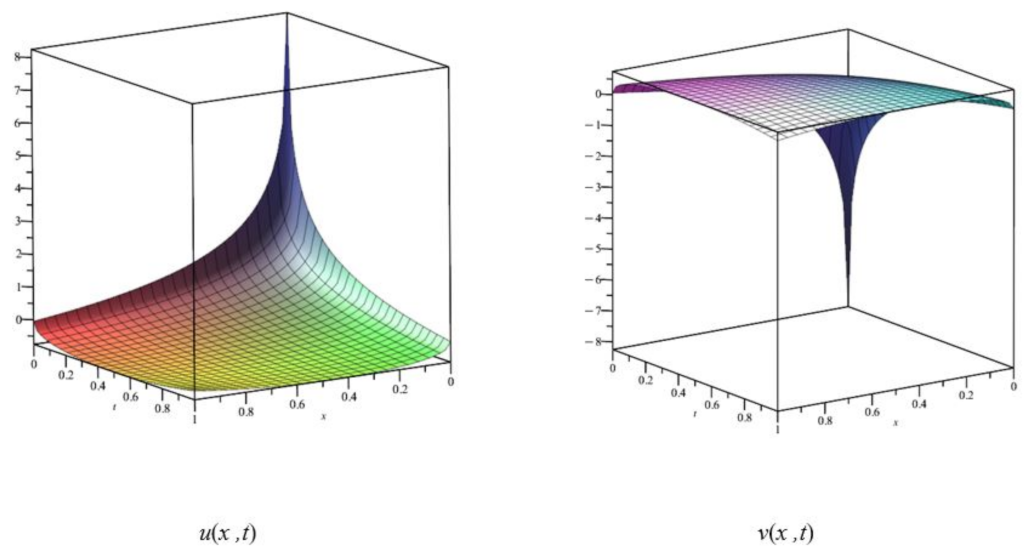
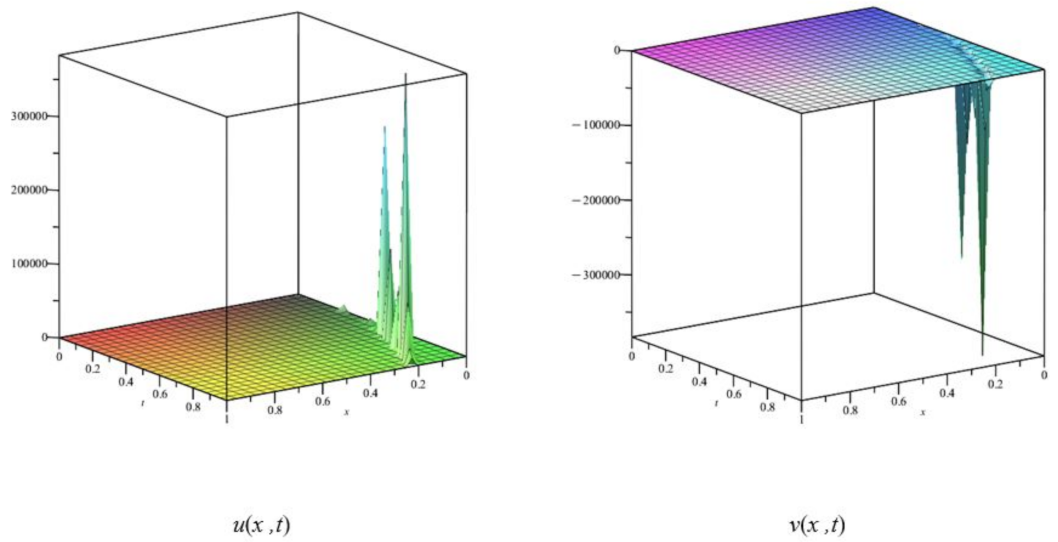
3.2. The Space–Time Fractional Coupled Boussinesq Equation
4. Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yildirim, O.; Uzun, M. Weak solvability of the unconditionally stable difference scheme for the coupled sine-Gordon system. Nonlinear Anal. Model. Control. 2020, 25, 997–1014. [Google Scholar] [CrossRef]
- Yildirim, O.; Uzun, M. Numer. Solut. High Order Stable Differ. Schemes Hyperbolic Multipoint Nonlocal Bound. Value Probl. Appl. Math. Comput. 2015, 25, 210–218. [Google Scholar]
- Yildirim, O.; Caglak, S. Lie point symmetries of difference equation for nonlinear sine-Gordon equation. Phys. Scr. 2019, 94, 085219. [Google Scholar] [CrossRef]
- Ozkan, A. Analytical Solutions of the Nonlinear (2 + 1)-Dimensional Soliton Equation by Using Some Methods. J. Eng. Technol. Appl. Sci. 2022, 7, 141–155. [Google Scholar]
- Fang, Y.; Wu, G.Z.; Wang, Y.Y.; Dai, C.Q. Data-driven femtosecond optical soliton excitations and parameters discovery of the high-order NLSE using the PINN. Nonlinear Dyn. 2021, 105, 603–616. [Google Scholar] [CrossRef]
- Fang, Y.; Wu, G.Z.; Wen, X.K.; Wang, Y.Y.; Dai, C.Q. Predicting certain vector optical solitons via the conservation-law deep-learning method. Opt. Laser Technol. 2022, 155, 108428. [Google Scholar] [CrossRef]
- Bo, W.B.; Wang, R.R.; Fang, Y.; Wang, Y.Y.; Dai, C.Q. Prediction and dynamical evolution of multipole soliton families in fractional Schrödinger equation with the PT-symmetric potential and saturable nonlinearity. Nonlinear Dyn. 2023, 111, 1577–1588. [Google Scholar] [CrossRef]
- Cheng, X.Y.; Wang, L.Z. Invariant analysis, exact solutions and conservation laws of (2 + 1)-dimensional time fractional Navier-Stokes equations. Proc. R. Soc. A 2022, 477, 20210220. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, L.Z. Lie symmetry analysis, conservation laws and separation variable type solutions of the time fractional Porous Medium equation. Wave. Random. Complex. 2020, 49, 1–20. [Google Scholar] [CrossRef]
- Cheng, X.Y.; Hou, J.; Wang, L.Z. Lie symmetry analysis, invariant subspace method and q-homotopy analysis method for solving fractional system of single-walled carbon nanotube. Comput. Appl. Math. 2021, 40, 1–17. [Google Scholar] [CrossRef]
- Wang, M.M.; Shen, S.F.; Wang, L.Z. Lie symmetry analysis, optimal system and conservation laws of a new (2 + 1)-dimensional KdV system. Commun. Theor. Phys. 2021, 73, 085004. [Google Scholar] [CrossRef]
- Wang, L.Z.; Wang, D.J.; Shen, S.F.; Huang, Q. Lie point symmetry analysis of the Harry-Dym type equation with Riemann-Liouville fractional derivative. Acta. Math. Appl. Sin. 2018, 34, 469–477. [Google Scholar] [CrossRef]
- Kudryashov, N.A. One method for finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simulat. 2012, 17, 2048–2053. [Google Scholar] [CrossRef] [Green Version]
- Akbulut, A.; Kaplan, M.; Tascan, F. The investigation of exact solutions of nonlinear partial differential equations by using exp(-Φ(ε)) method. Optik 2017, 132, 382–387. [Google Scholar] [CrossRef]
- Ozkan, E.M.; Ozkan, A. On exact solutions of some important nonlinear conformable time-fractional differential equations. Sema J. 2022, 79, 1–16. [Google Scholar]
- Ozkan, A. On the soliton solutions of some time conformable equations in fluid dynamics. Int. Mod. Phys. B 2023, 2450027. [Google Scholar] [CrossRef]
- Ozkan, E.M.; Ozkan, A. The Soliton Solutions for Some Nonlinear Fractional Differential Equations with Beta-Derivative. Axioms 2021, 10, 1–15. [Google Scholar] [CrossRef]
- Gómez, S.; Cesar, A. A nonlinear fractional Sharma–Tasso–Olver equation. App. Math. Comput. 2015, 266, 385–389. [Google Scholar] [CrossRef]
- Lu, B. The first integral method for some time fractional differential equations. J. Math. Anal. Appl. 2012, 395, 684–693. [Google Scholar] [CrossRef] [Green Version]
- Zheng, B. Exp-function method for solving fractional partial differential equations. Sci. World J. 2013, 2013, 465723. [Google Scholar] [CrossRef] [Green Version]
- Ozkan, E.M. New Exact Solutions of Some Important Nonlinear Fractional Partial Differential Equations with Beta Derivative. Fractal Fract. 2022, 6, 173. [Google Scholar] [CrossRef]
- Ozkan, E.M.; Akar, M. Analytical solutions of (2 + 1)-dimensional time conformable Schrödinger equation using improved sub-equation method. Optik 2022, 267, 169660. [Google Scholar] [CrossRef]
- Akar, M.; Ozkan, E.M. On exact solutions of the (2 + 1)-dimensional time conformable Maccari system. Int. Mod. Phys. B 2023, 1–12. [Google Scholar] [CrossRef]
- Matinfar, M.; Eslami, M.; Kordy, M. The functional variable method for solving thefractional Korteweg de Vries equations and the coupled Korteweg de Vries equations. Pramana J. Phys. 2015, 85, 583–592. [Google Scholar] [CrossRef]
- Zogheib, B.; Tohidi, E.; Baskonus, H.M.; Cattani, C. Method of lines for multi-dimensional coupled viscous Burgers’ equations via nodal Jacobi spectral collocation method. Phys. Scr. 2021, 96, 124011. [Google Scholar] [CrossRef]
- Sulaiman, T.A.; Yavuz, M.; Bulut, H.; Baskonus, H.M. Investigation of the fractional coupled viscous Burgers’ equation involving Mittag-Leffler kernel. Phys. Stat. Mech. Appl. 2019, 527, 121126. [Google Scholar] [CrossRef]
- Bulut, H.; Tuz, M.; Akturk, T. New Multiple Solution to the Boussinesq Equation and the Burgers-Like Equation. J. Appl. Math. 2013, 2013, 952614. [Google Scholar] [CrossRef]
- Gencoglu, M.T. Complex Solution for Burger-Like Equation. Turk. J. Math. 2013, 8, 121–123. [Google Scholar]
- Eskandari, E.M.; Taghizadeh, N. Exact Solutions of Two Nonlinear Space–Time Fractional Differential Equations by Application of Exp-function Method. Appl. Appl. Math. Int. J. 2020, 15, 1–8. [Google Scholar]
- Madsen, P.A.; Murray, R.; Sorensen, O.R. A new form of the Boussinesq equations with improved linear dispersion characteristics. Coast Engl. J. 1991, 15, 371–388. [Google Scholar] [CrossRef]
- Yaslan, H.C.; Girgin, A. Exp-function method for the conformable Space–Time fractional STO, ZKBBM and coupled Boussinesq equations. Arab. J. Basic Appl. Sci. 2019, 26, 163–170. [Google Scholar] [CrossRef] [Green Version]
- Sahadevan, R.; Prakash, P. Exact solutions and maximal dimension of invariant subspaces of time fractional coupled nonlinear partial differential equations. Commun. Nonlinear Sci. Numer. Simulat. 2017, 42, 158–177. [Google Scholar] [CrossRef]
- Hosseini, K.; Bekir, A.; Ansari, R. Exact solutions of nonlinear conformable time-fractional Boussinesq equations using the exp(-ϕ(ε))-expansion method. Opt. Quant. Electron. 2017, 49, 131. [Google Scholar] [CrossRef]
- Triki, H.; Kara, A.H.; Biswas, A. Domain walls to Boussinesq-type equations in (2 + 1)-dimensions. Indian J. Phys. 2014, 88, 751–755. [Google Scholar] [CrossRef]
- Abazari, R.; Jamshidzadeh, S.; Biswas, A. Solitary wave solutions of coupled Boussinesq equation. Complexity 2016, 21, 151–155. [Google Scholar] [CrossRef]
- Abazari, R.; Jamshidzadeh, S.; Biswas, A. Multi soliton solutions based on interactions of basic traveling waves with an application to the nonlocal Boussinesq equation. Acta Phys. Pol. B 2016, 47, 1101–1112. [Google Scholar]
- Biswas, A.; Kara, A.H.; Moraru, L.; Triki, H.; Moshokoa, S.P. Shallow water waves modeled by the Boussinesq equation having logarithmic non linearity. Proc. Rom. Acad. Ser. A 2017, 18, 144–149. [Google Scholar]
- Biswas, A.; Ekici, M.; Sonmezoglu, A. Gaussian solitary waves to Boussinesq equation with dual dispersion and logarithmic non linearity. Nonlinear Anal. Model. Control. 2018, 23, 942–950. [Google Scholar] [CrossRef]
- Jawad, A.J.M.; Petković, M.D.; Laketa, P.; Biswas, A. Dynamics of shallow water waves with Boussinesq equation. Sci. Iran. B 2013, 20, 179–184. [Google Scholar] [CrossRef] [Green Version]
- Sousa, J.V.D.C.; de Oliveira, E.C. A new truncated M-fractional derivative type unifying some fractional derivative types with classical properties. Int. J. Anal. Appl. 2018, 16, 83–96. [Google Scholar]
- Salahshour, S.; Ahmadian, A.; Abbasbandy, S.; Baleanu, D. M-fractional derivative under interval uncertainty: Theory, properties and applications. Chaos Solitons Fractals 2018, 117, 84–93. [Google Scholar] [CrossRef]
- Zayed, E.M.; Amer, A.; Shohib, R.M. Exact traveling wave solutions for nonlinear fractional partial differential equations using the improved (G’/G)-expansion method. Int. J. Eng. Appl. Sci. 2014, 7, 18–31. [Google Scholar]
- Yusuf, A.; Inc, M.; Baleanu, D. Optical Solitons with M-Truncated and Beta Derivatives in Nonlinear Optics. Front. Phys. 2019, 7, 126. [Google Scholar] [CrossRef] [Green Version]
- Zafar, A.; Bekir, A.; Raheel, M.; Razzaq, W. Optical soliton solutions to Biswas–Arshed model with truncated M-fractional derivative. Optik 2020, 222, 165355. [Google Scholar] [CrossRef]
- Yaslan, H.C.; Girgin, A. (G’/G)-expansion Method for the Conformable Space–Time Fractional Jimbo-Miwa and Burger-like Equations. Math. Sci. Appl. Notes 2019, 7, 47–53. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Özkan, A.; Özkan, E.M.; Yildirim, O. On Exact Solutions of Some Space–Time Fractional Differential Equations with M-truncated Derivative. Fractal Fract. 2023, 7, 255. https://doi.org/10.3390/fractalfract7030255
Özkan A, Özkan EM, Yildirim O. On Exact Solutions of Some Space–Time Fractional Differential Equations with M-truncated Derivative. Fractal and Fractional. 2023; 7(3):255. https://doi.org/10.3390/fractalfract7030255
Chicago/Turabian StyleÖzkan, Ayten, Erdoĝan Mehmet Özkan, and Ozgur Yildirim. 2023. "On Exact Solutions of Some Space–Time Fractional Differential Equations with M-truncated Derivative" Fractal and Fractional 7, no. 3: 255. https://doi.org/10.3390/fractalfract7030255
APA StyleÖzkan, A., Özkan, E. M., & Yildirim, O. (2023). On Exact Solutions of Some Space–Time Fractional Differential Equations with M-truncated Derivative. Fractal and Fractional, 7(3), 255. https://doi.org/10.3390/fractalfract7030255