
Impact of Lévy Noise with Infinite Activity on the Dynamics of Measles Epidemics

Abstract
:1. Introduction
2. Model Formulation
- Q1:
- Does the Lévy noise influence the dynamic properties of measles outbreaks?
- Q2:
- How can contaminated vaccinations contribute to the spread of measles, and what measures are in place to prevent such incidents?
- Q3:
- What criterion is used to determine the extinction of a disease?
- Q4:
- What are the criteria that indicate the persistence of the system?
3. The Existence of a Positive Solution and Its Uniqueness
- (C1).
- For every ∃ ;for ; here,
- (C2).
- for , C is a positive constant.
4. Extinction for System (3)
5. Persistence in Mean
6. Estimation
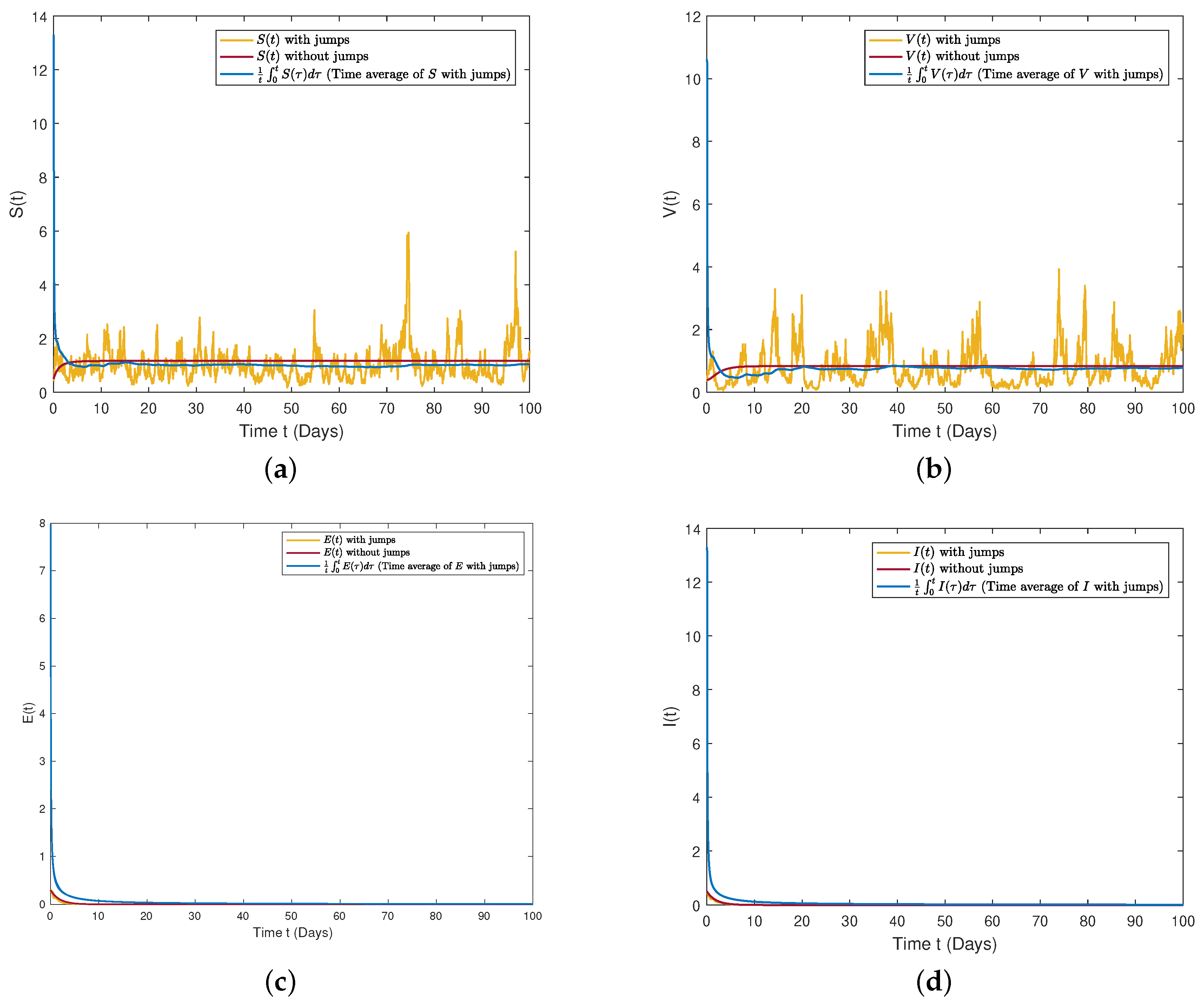
7. Numerical Results and Discussion
The Impact of Lévy Noise on the Class
8. Concluding Remarks and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mose, O.F.; Sigey, J.K.; Okello, J.A.; Okwoyo, J.M.; Giterere, J. Mathematical Modeling on the Control of Measles by Vaccination: Case Study of Kisii County, Kenya; Kenya Education Research Database: Kenya, 2014; Available online: https://kerd.ku.ac.ke/ (accessed on 16 April 2023).
- Garba, S.M.; Safi, M.A.; Usaini, S. Mathematical model for assessing the impact of vaccination and treatment on measles transmission dynamics. Math. Methods Appl. Sci. 2017, 40, 6371–6388. [Google Scholar] [CrossRef]
- Roberts, M.G.; Tobias, M.I. Predicting and preventing measles epidemic in New Zealand: Application of mathematical model. Epidem. Infect. 2000, 124, 279–287. [Google Scholar] [CrossRef] [PubMed]
- Qureshi, S.; Jan, R. Modeling of measles epidemic with optimized fractional order under Caputo differential operator. Chaos Solitons Fractals 2021, 145, 110766. [Google Scholar] [CrossRef]
- Perry, R.T.; Halsey, N.A. The clinical significance of measles: A review. J. Infect. Dis. 2004, 189 (Suppl. S1), S4–S16. [Google Scholar] [PubMed]
- Guo, B.; Khan, A.; Din, A. Numerical Simulation of Nonlinear Stochastic Analysis for Measles Transmission: A Case Study of a Measles Epidemic in Pakistan. Fractal Fract. 2023, 7, 130. [Google Scholar] [CrossRef]
- Mossong, J.; Muller, C.P. Modelling measles re-emergence as a result of waning of immunity in vaccinated populations. Vaccine 2003, 21, 4597–4603. [Google Scholar] [CrossRef] [PubMed]
- Bolarin, G. On the dynamical analysis of a new model for measles infection. Int. J. Math. Trends Technol. 2014, 2, 144–155. [Google Scholar] [CrossRef]
- Taiwo, L.; Idris, S.; Abubakar, A.; Nguku, P.; Nsubuga, P.; Gidado, S. Factors affecting access to information on routine immunization among mothers of under 5 children in Kaduna state Nigeria, 2015. Pan Afr. Med. J. 2017, 27, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Mere, M.O.; Goodson, J.L.; Chandio, A.K.; Rana, M.S.; Hasan, Q.; Teleb, N.; Alexander, J.P., Jr. Progress toward measles elimination—Pakistan, 2000–2018. Morb. Mortal. Wkly. Rep. 2019, 68, 505. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Eastern Mediterranean Vaccine Action Plan 2016–2020: A Framework for Implementation of the Global Vaccine Action Plan (No. WHO-EM/EPI/353/E); World Health Organization, Regional Office for the Eastern Mediterranean: Geneva, Switzerland, 2019.
- Memon, Z.; Qureshi, S.; Memon, B.R. Mathematical analysis for a new nonlinear measles epidemiological system using real incidence data from Pakistan. Eur. Phys. J. Plus 2020, 135, 378. [Google Scholar] [CrossRef] [PubMed]
- Din, A.; Ain, Q.T. Stochastic optimal control analysis of a mathematical model: Theory and application to non-singular kernels. Fractal Fract. 2022, 6, 279. [Google Scholar] [CrossRef]
- Khan, F.M.; Khan, Z.U.; Lv, Y.P.; Yusuf, A.; Din, A. Investigating of fractional order dengue epidemic model with ABC operator. Results Phys. 2021, 24, 104075. [Google Scholar] [CrossRef]
- Liu, P.; Ikram, R.; Khan, A.; Din, A. The measles epidemic model assessment under real statistics: An application of stochastic optimal control theory. Comput. Methods Biomech. Biomed. Eng. 2022, 26, 138–159. [Google Scholar] [CrossRef] [PubMed]
- El Fatini, M.; Sekkak, I. Lévy noise impact on a stochastic delayed epidemic model with Crowly–Martin incidence and crowding effect. Phys. Stat. Mech. Its Appl. 2020, 541, 123315. [Google Scholar] [CrossRef]
- Sabbar, Y.; Khan, A.; Din, A.; Tilioua, M. New Method to Investigate the Impact of Independent Quadratic Stable Poisson Jumps on the Dynamics of a Disease under Vaccination Strategy. Fractal Fract. 2023, 7, 226. [Google Scholar] [CrossRef]
- Berrhazi, B.E.; El Fatini, M.; Caraballo Garrido, T.; Pettersson, R. A stochastic SIRI epidemic model with Lévy noise. Discret. Contin. Dyn.-Syst.-Ser. B 2018, 23, 3645–3661. [Google Scholar] [CrossRef]
- Li, X.P.; Din, A.; Zeb, A.; Kumar, S.; Saeed, T. The impact of Lévy noise on a stochastic and fractal-fractional Atangana–Baleanu order hepatitis B model under real statistical data. Chaos Solitons Fractals 2022, 154, 111623. [Google Scholar] [CrossRef]
- James Peter, O.; Ojo, M.M.; Viriyapong, R.; Abiodun Oguntolu, F. Mathematical model of measles transmission dynamics using real data from Nigeria. J. Differ. Equ. Appl. 2022, 28, 753–770. [Google Scholar] [CrossRef]
- Zhao, Y.; Jiang, D. The threshold of a stochastic SIRS epidemic model with saturated incidence. Appl. Math. Lett. 2014, 34, 90–93. [Google Scholar] [CrossRef]
- Zhao, Y.; Jiang, D. The threshold of a stochastic SIS epidemic model with vaccination. Appl. Math. Comput. 2014, 243, 718–727. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jan | Feb | Mar | Apr | May | June | July | Aug | Sep | Oct |
|---|---|---|---|---|---|---|---|---|---|
| 238 | 253 | 398 | 398 | 277 | 169 | 71 | 29 | 24 | 18 |
| Parameter | Description | Source |
|---|---|---|
| 260,479 | Estimated | |
| Estimated | ||
| 0.97 | Estimated | |
| Fitted | ||
| 9.3408 | Fitted | |
| Fitted | ||
| Fitted | ||
| 0 | Estimated | |
| Fitted |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Liu, P. Impact of Lévy Noise with Infinite Activity on the Dynamics of Measles Epidemics. Fractal Fract. 2023, 7, 434. https://doi.org/10.3390/fractalfract7060434
Song Y, Liu P. Impact of Lévy Noise with Infinite Activity on the Dynamics of Measles Epidemics. Fractal and Fractional. 2023; 7(6):434. https://doi.org/10.3390/fractalfract7060434
Chicago/Turabian StyleSong, Yuqin, and Peijiang Liu. 2023. "Impact of Lévy Noise with Infinite Activity on the Dynamics of Measles Epidemics" Fractal and Fractional 7, no. 6: 434. https://doi.org/10.3390/fractalfract7060434
APA StyleSong, Y., & Liu, P. (2023). Impact of Lévy Noise with Infinite Activity on the Dynamics of Measles Epidemics. Fractal and Fractional, 7(6), 434. https://doi.org/10.3390/fractalfract7060434