
An Adaptive Selection Method for Shape Parameters in MQ-RBF Interpolation for Two-Dimensional Scattered Data and Its Application to Integral Equation Solving


Abstract
:1. Introduction
2. Algorithm for Selecting Shape Parameters in MQ-RBF Interpolation
2.1. MQ-RBF Interpolation
2.2. Algorithm Selection
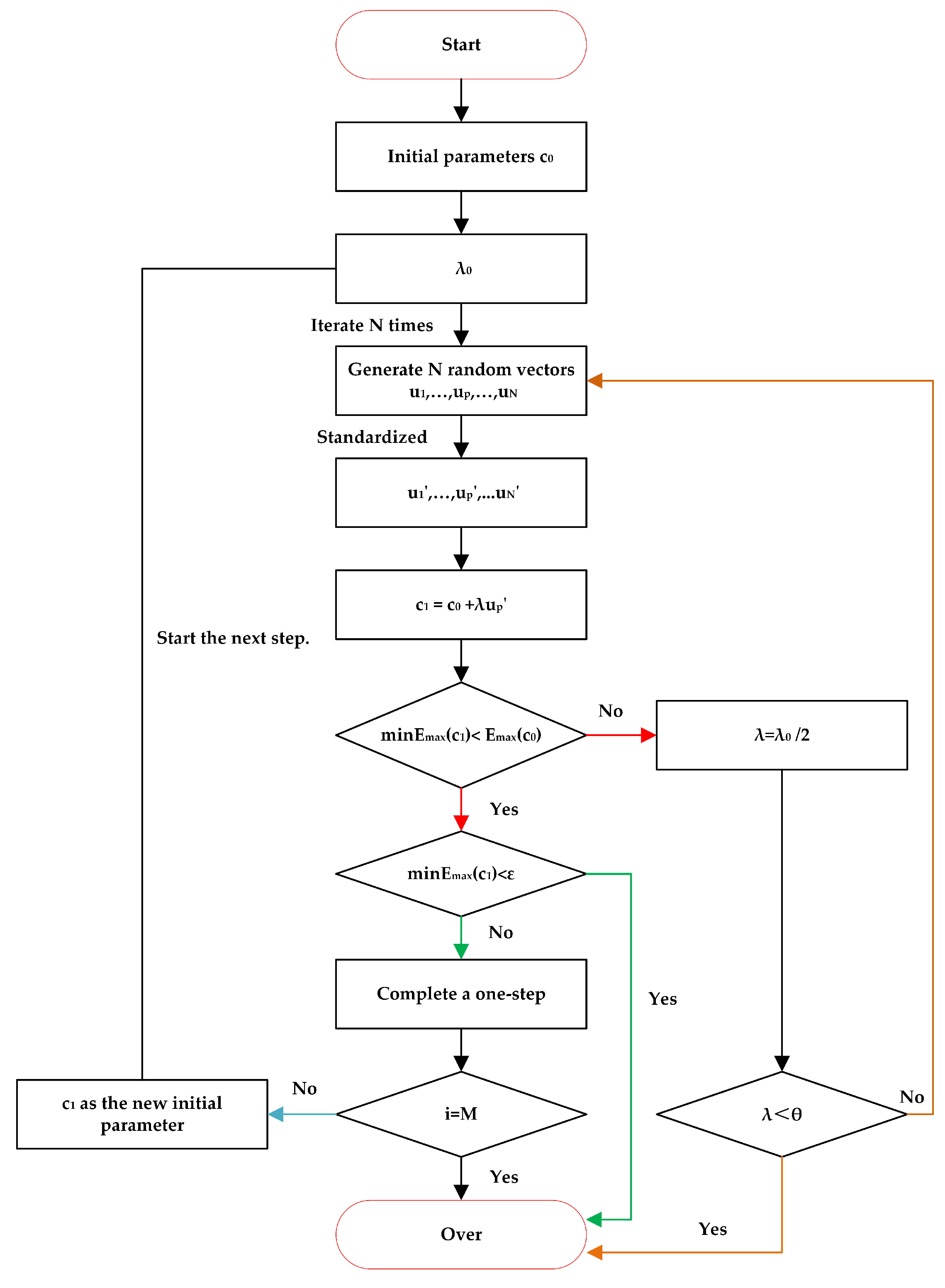
2.3. Improved Random Walk Algorithm
3. Selection Model of the
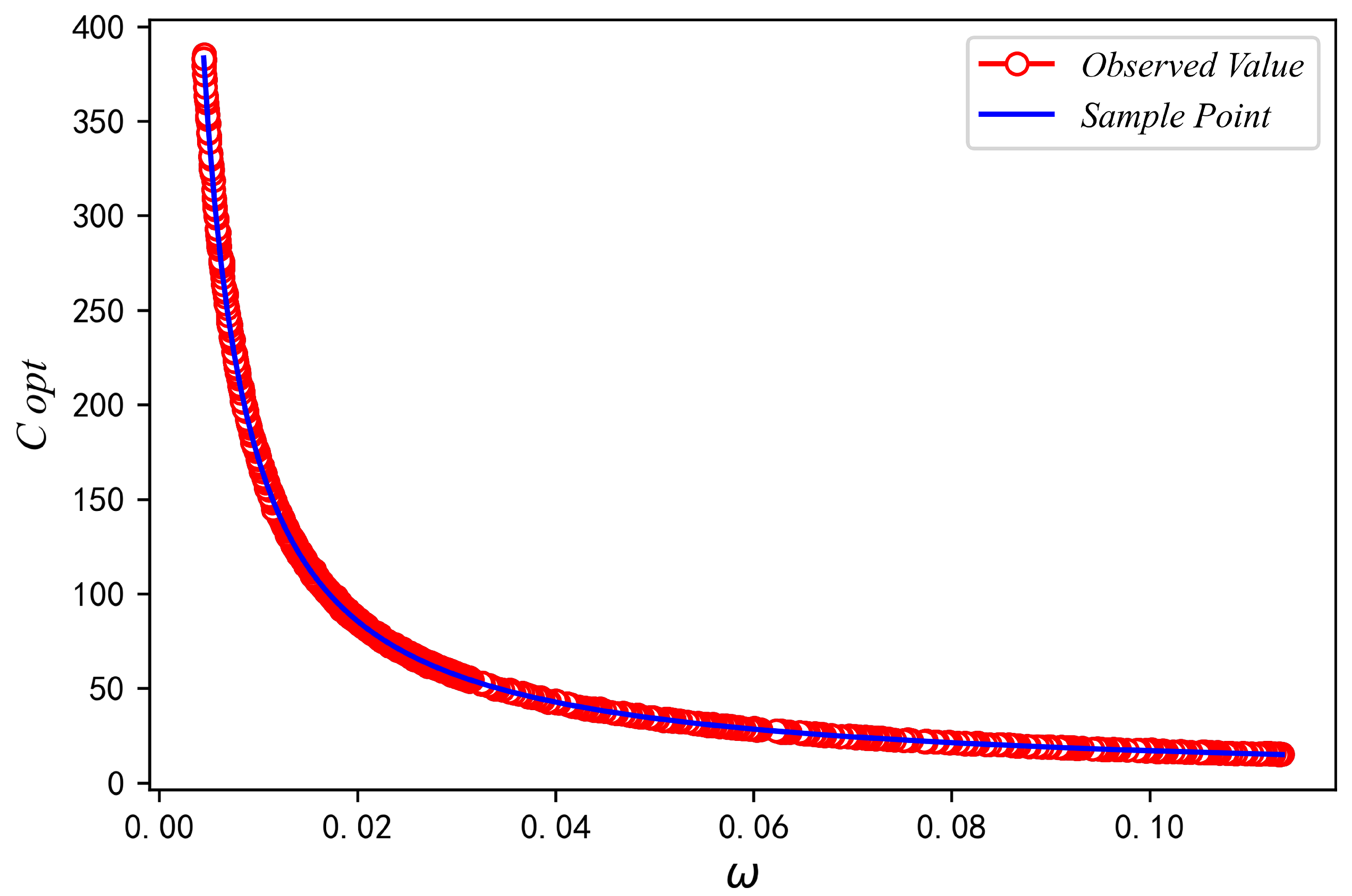
3.1. The Relationship between and
3.2. The Selection Model for the Linear Combination of Sine Functions
3.2.1. Establishment of the Data Set and Selection of Regression Model
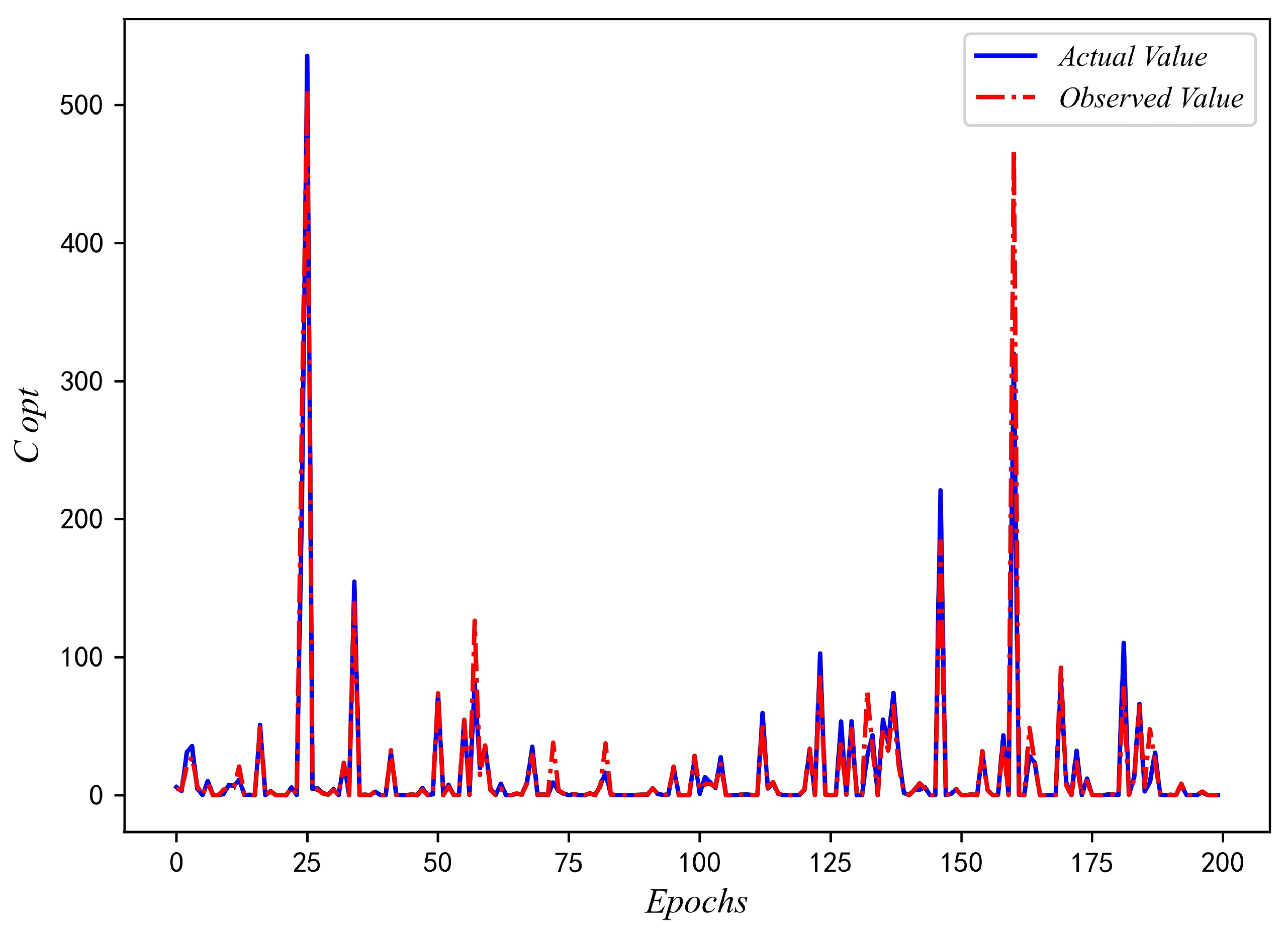
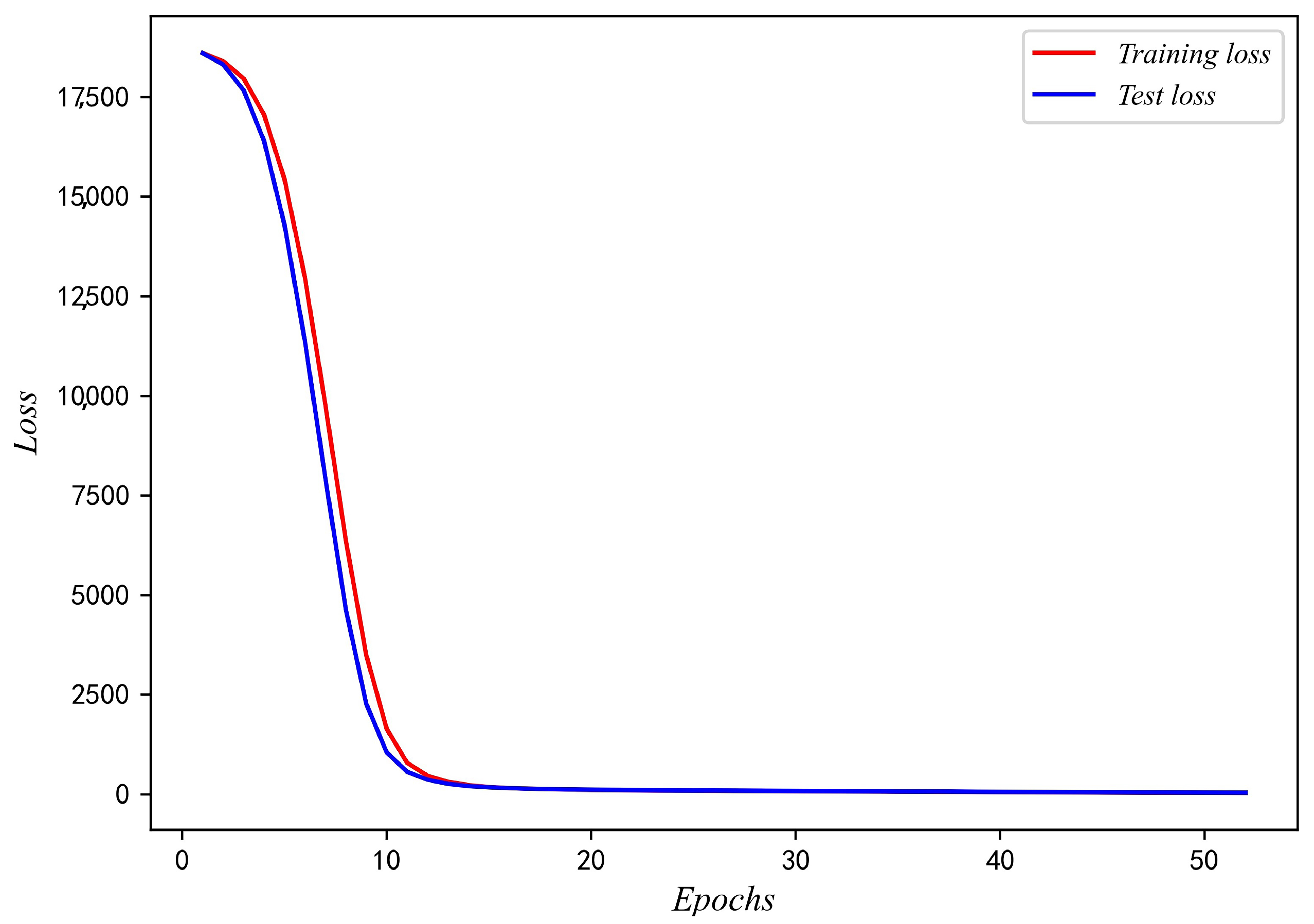
3.2.2. Construction of the Selection Model Based on PSO-BP
3.3. Verification Experiment
4. Adaptive Selection Method
4.1. Fourier Expansion of 2-D Scattered Data
4.2. Adaptive Selection Method of the Shape Parameter in the MQ-RBF Interpolation for 2D Scattered Data
5. Application of the Adaptive Method in Solving One-Dimensional Integral Equations
5.1. MQ-RBF Collocation Approximation for One-Dimensional Linear Integral Equation
5.2. MQ-RBF Collocation Approximation for One-Dimensional Nonlinear Integral Equation
5.3. Solving One-Dimensional Integral Equations Using the MQ-RBF Method with an Optimal Shape Parameter
5.4. Numerical Example
- 1.
- One-dimensional Fredholm linear integral equation:The exact solution to this equation is . The integration of the interpolation coefficients is computed using a 20-point Gauss integration. Our adaptive method was utilized to select a shape parameter of , with a center distance of , and 11 points share the same center, .
- 2.
- One-dimensional Volterra linear integral equation:The exact solution of the function is . The interpolation coefficients are integrated using a 60-point Gauss integration. The center points of MQ-RBF are set to . Following the application of our adaptive method, a suitable shape parameter is determined to be , with both the center and collation point taking position 11. We select a total of 501 measuring points at an interval of .
- 3.
- One-dimensional Fredholm nonlinear integral equation:The exact solution of this equation is . The integration of the interpolation coefficients is computed using a 10-point Gauss integration. The center points of MQ-RBF are set to . Utilizing our adaptive method, we settled on a shape parameter of , with the center point and the collocation point being 10, and .
- 4.
- One-dimensional Volterra nonlinear integral equation:The exact solution for this equation is . The integration of the interpolation coefficients is computed using a 10-point Gauss integration. The shape parameter was chosen using our adaptive strategy, and between the measuring points.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Franke, R. Scattered data interpolation: Tests of some methods. Math. Comput. 1982, 38, 181–200. [Google Scholar]
- Carlson, R.; Foley, T. The parameter R2 in multiquadric interpolation. Comput. Math. Appl. 1991, 21, 29–42. [Google Scholar] [CrossRef]
- Foley, T. Near optimal parameter selection for multiquadric interpolation. J. Appl. Sci. Comput. 1991, 1, 54–69. [Google Scholar]
- Hardy, R. Multiquadric equations of topography and other irregular surfaces. J. Geophys. Res. 1971, 76, 1905–1915. [Google Scholar] [CrossRef]
- Rippa, S. An algorithm for selecting a good value for the parameter c in radial basis function interpolation. Adv. Comput. Math. 1999, 11, 193–210. [Google Scholar] [CrossRef]
- Press, W.; Flannery, B.; Teukolsky, S. Do two distributions have the same means or variances. In Numerical Recipes: The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 1986; pp. 464–469. [Google Scholar]
- Trahan, C.; Wyatt, R. Radial basis function interpolation in the quantum trajectory method: Optimization of the multi-quadric shape parameter. J. Comput. Phys. 2003, 185, 27–49. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, L.; Chen, X. The Radial Basis Function shape parameter chosen and its application in engneering. In Proceedings of the 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems, Shanghai, China, 20–22 November 2009; Volume 1, pp. 79–83. [Google Scholar]
- Amirfakhrian, M.; Arghand, M.; Kansa, E. A new approximate method for an inverse time-dependent heat source problem using fundamental solutions and RBFs. Eng. Anal. Bound. Elem. 2016, 64, 278–289. [Google Scholar] [CrossRef]
- Sarra, S.; Sturgill, D. A random variable shape parameter strategy for radial basis function approximation methods. Eng. Anal. Ith Bound. Elem. 2009, 33, 1239–1245. [Google Scholar] [CrossRef]
- Mongillo, M. Choosing basis functions and shape parameters for radial basis function methods. SIAM Undergrad. Res. Online 2011, 4, 2–6. [Google Scholar] [CrossRef]
- Xiang, S.; Wang, K.; Ai, Y.; Sha, Y.; Shi, H. Trigonometric variable shape parameter and exponent strategy for generalized multiquadric radial basis function approximation. Appl. Math. Model. 2012, 36, 1931–1938. [Google Scholar] [CrossRef]
- Farzaneh, A.; Mohsen, E. Optimal variable shape parameters using genetic algorithm for radial basis function approximation. Ain Shams Eng. J. 2015, 6, 639–647. [Google Scholar]
- Chen, W.; Hong, Y.; Lin, J. The sample solution approach for determination of the optimal shape parameter in the Multiquadric function of the Kansa method. Comput. Math. Appl. 2018, 75, 2942–2954. [Google Scholar] [CrossRef]
- Bendali, N.; Ouali, M.; Nguyen, M.; Said, A. Optimal trajectory generation method to find a smooth robot joint trajectory based on multiquadric radial basis functions. Int. J. Adv. Manuf. Technol. 2022, 120, 297–312. [Google Scholar]
- Shabnam, S.; Majid, A.; Tofigh, A. An algorithm for choosing a good shape parameter for radial basis functions method with a case study in image processing. Results Appl. Math. 2022, 16, 100337. [Google Scholar]
- Rabbani, M.; Maleknejad, K.; Aghazadeh, N.; Mollapourasl, R. Computational projection methods for solving Fredholm integral equation. Appl. Math. Comput. 2007, 191, 140–143. [Google Scholar] [CrossRef]
- Aziz, I. New algorithms for the numerical solution of nonlinear Fredholm and Volterra integral equations using Haar wavelets. J. Comput. Appl. Math. 2013, 239, 333–345. [Google Scholar] [CrossRef]
- Saberi-Nadjafi, J.; Mehrabinezhad, M.; Akbari, H. Solving Volterra integral equations of the second kind by wavelet-Galerkin scheme. Comput. Math. Appl. 2012, 63, 1536–1547. [Google Scholar] [CrossRef]
- Maleknejad, K.; Mollapourasl, R.; Alizadeh, M. Convergence analysis for numerical solution of Fredholm integral equation by Sinc approximation. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2478–2485. [Google Scholar] [CrossRef]
- Maleknejad, K.; Nedaiasl, K. Application of Sinc-collocation method for solving a class of nonlinear Fredholm integral equations. Comput. Math. Appl. 2011, 62, 3292–3303. [Google Scholar] [CrossRef]
- Maleknejad, K.; Rahimi, B. Modification of block pulse functions and their application to solve numerically Volterra integral equation of the first kind. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2469–2477. [Google Scholar] [CrossRef]
- Mirzaee, F.; Hoseini, A. Numerical solution of nonlinear Volterra–Fredholm integral equations using hybrid of block-pulse functions and Taylor series. Alex. Eng. J. 2013, 52, 551–555. [Google Scholar] [CrossRef]
- Xie, W.-J.; Lin, F. A fast numerical solution method for two dimensional Fredholm integral equations of the second kind. Appl. Numer. Math. 2009, 59, 1709–1719. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Y.; Nie, X. Solving the linear integral equations based on radial basis function interpolation. J. Appl. Math. 2014, 2014, 793582. [Google Scholar] [CrossRef]
- Liu, C.; Liu, D. Optimal shape parameter in the MQ-RBF by minimizing an energy gap functional. Appl. Math. Lett. 2018, 1, 157–165. [Google Scholar] [CrossRef]
- Haji, S.; Abdulazeez, A. Comparison of optimization techniques based on gradient descent algorithm: A review. Palarch’s J. Archaeol. Egypt/Egyptol. 2021, 18, 2715–2743. [Google Scholar]
- Ridha, H.; Hizam, H.; Gomes, C. On the search of the shape parameter in radial basis functions using univariate global optimization methods. J. Glob. Optim. 2021, 224, 120136. [Google Scholar]
- Mirjalili, S. Evolutionary algorithms and neural networks. In Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2019; p. 780. [Google Scholar]
- Prajapati, V.; Jain, M.; Chouhan, L. Tabu search algorithm (TSA): A comprehensive survey. In Proceedings of the 2020 3rd International Conference on Emerging Technologies in Computer Engineering: Machine Learning and Internet of Things (ICETCE), IEEE, Jaipur, India, 7–8 February 2020; pp. 1–8. [Google Scholar]
- Xu, C.; Sun, J.; Wang, C. An image encryption algorithm based on random walk and hyperchaotic systems. J. Glob. Optim. 2020, 30, 2050060. [Google Scholar] [CrossRef]
- Sun, J.; Wang, L.; Gong, D. Model for Choosing the Shape Parameter in the Multiquadratic Radial Basis Function Interpolation of an Arbitrary Sine Wave and Its Application. Mathematics 2023, 11, 1856. [Google Scholar] [CrossRef]
- Boyko, A.; Kukartsev, V.; Tynchenko, V. Using linear regression with the least squares method to determine the parameters of the Solow model. J. Phys. Conf. Ser. 2020, 1582, 012016. [Google Scholar] [CrossRef]
- Salim, D.; Hoseana, J. Extending a technique for integrating quotients of linear combinations of sines and cosines. Int. J. Math. Educ. Sci. Technol. 2022, 54, 124–131. [Google Scholar] [CrossRef]
- Kiran, P.; Parameshachari, B.; Yashwanth, J. Offline signature recognition using image processing techniques and back propagation neuron network system. SN Comput. Sci. 2021, 2, 196. [Google Scholar] [CrossRef]
- Rath, S.; Tripathy, A.; Tripathy, A. Prediction of new active cases of coronavirus disease (COVID-19) pandemic using multiple linear regression model. Diabetes Metab. Syndr. Clin. Res. Rev. 2020, 14, 1467–1474. [Google Scholar] [CrossRef] [PubMed]
- Shen, G.; Tan, Q.; Zhang, H. Deep learning with gated recurrent unit networks for financial sequence predictions. Procedia Comput. Sci. 2018, 131, 895–903. [Google Scholar] [CrossRef]
- Ghosh, S.; Dasgupta, A.; Swetapadma, A. A study on support vector machine based linear and non-linear pattern classification. In Proceedings of the 2019 International Conference on Intelligent Sustainable Systems (ICISS), IEEE, Palladam, India, 21–22 February 2019; pp. 24–28. [Google Scholar]
- Bansal, M.; Goyal, A.; Choudhary, A. A comparative analysis of K-Nearest Neighbour, Genetic, Support Vector Machine, Decision Tree, and Long Short Term Memory algorithms in machine learning. Decis. Anal. J. 2022, 3, 100071. [Google Scholar] [CrossRef]
- Koessler, E.; Almomani, A. Hybrid particle swarm optimization and pattern search algorithm. Optim. Eng. 2021, 22, 1539–1555. [Google Scholar] [CrossRef]
- Medková, D. Classical solutions of the Dirichlet problem for the Darcy-Forchheimer-Brinkman system. AIMS Math. 2019, 4, 1540–1553. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | |
|---|---|
| Gaussian | |
| Markov | |
| Multiquadric | |
| Inverse multiquadric |
| Algorithm | MaxError | Run Time (s) | Number of Iterations | |
|---|---|---|---|---|
| GD | 0.64027 | 0.2855 | 20 | |
| NR | 1.07542 | 0.2569 | 20 | |
| GA | 0.54031 | 0.6937 | 16 | |
| TS | 0.48296 | 0.4016 | 15 | |
| RW | 0.54027 | 0.2601 | 16 |
| Algorithm | MaxError | Run Time (s) | Number of Iterations | |
|---|---|---|---|---|
| IRW | 0.52147 | 0.2675 | 14 |
| MaxError | ||
|---|---|---|
| 0.26073 | ||
| 0.17382 | ||
| 0.13036 | ||
| 0.10429 | ||
| 0.08691 | ||
| 0.07449 | ||
| 0.06518 | ||
| 0.05631 | ||
| 0.05142 |
| MaxError | ||
|---|---|---|
| 1.04294 | ||
| 1.56441 | ||
| 2.08588 | ||
| 2.60735 | ||
| 3.12882 | ||
| 3.65029 | ||
| 4.17176 | ||
| 4.69343 | ||
| 5.22458 |
| Model | Time (Min) | MSE | Accuracy |
|---|---|---|---|
| BP | 2014 | 0.248787 | 91.7344% |
| LSTM | 2083 | 1.847632 | 84.9843% |
| GRU | 1971 | 2.847412 | 81.5832% |
| SVR | 2646 | 7.626251 | 74.2447% |
| MLR | 1722 | 18.72263 | 67.9843% |
| Model | Evaluation Index | Result |
|---|---|---|
| Time (min) | 2083 | |
| PSO-BP | MSE | 0.1925473 |
| Accuracy | 97.2154% |
| Function |
|---|
| Function | MaxError | |||
|---|---|---|---|---|
| Model | Algorithm | Model | Algorithm | |
| 34.2114 | 33.0754 | |||
| 0.08674 | 0.08523 | |||
| 0.00808 | 0.00741 | |||
| 183.1259 | 180.1461 | |||
| 0.27288 | 0.25611 | |||
| 14.3633 | 13.7831 | |||
| 4695.355 | 4679.887 | |||
| 8.13223 | 8.00126 | |||
| 0.488803 | 0.486761 | |||
| 0.000280 | 0.000257 | |||
| f | Interval | Data Point |
|---|---|---|
| 18 | ||
| 24 | ||
| 46 | ||
| 51 | ||
| 67 | ||
| 72 | ||
| 91 |
| f | RMSE | Operation Time (s) | ||||
|---|---|---|---|---|---|---|
| Proposed | Rippa’s | Proposed | Rippa’s | Proposed | Rippa’s | |
| 2.0675 | 2.1890 | 0.6375 | 4.6583 | |||
| 2.3459 | 1.7876 | 1.0375 | 5.8722 | |||
| 1.0259 | 1.0878 | 1.1693 | 5.9426 | |||
| 0.9934 | 0.8465 | 1.2716 | 6.5342 | |||
| 0.2027 | 0.5783 | 1.2981 | 6.8953 | |||
| 2.8094 | 0.7884 | 1.5720 | 7.6255 | |||
| 1.6119 | 2.0781 | 2.6154 | 8.4231 | |||
| NO. | Haar Wavelet (j = 6) | Maleknejad | O-MQRBF | |||
|---|---|---|---|---|---|---|
| RMSE | MaxError | RMSE | MaxError | RMSE | MaxError | |
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Wang, L.; Gong, D. An Adaptive Selection Method for Shape Parameters in MQ-RBF Interpolation for Two-Dimensional Scattered Data and Its Application to Integral Equation Solving. Fractal Fract. 2023, 7, 448. https://doi.org/10.3390/fractalfract7060448
Sun J, Wang L, Gong D. An Adaptive Selection Method for Shape Parameters in MQ-RBF Interpolation for Two-Dimensional Scattered Data and Its Application to Integral Equation Solving. Fractal and Fractional. 2023; 7(6):448. https://doi.org/10.3390/fractalfract7060448
Chicago/Turabian StyleSun, Jian, Ling Wang, and Dianxuan Gong. 2023. "An Adaptive Selection Method for Shape Parameters in MQ-RBF Interpolation for Two-Dimensional Scattered Data and Its Application to Integral Equation Solving" Fractal and Fractional 7, no. 6: 448. https://doi.org/10.3390/fractalfract7060448
APA StyleSun, J., Wang, L., & Gong, D. (2023). An Adaptive Selection Method for Shape Parameters in MQ-RBF Interpolation for Two-Dimensional Scattered Data and Its Application to Integral Equation Solving. Fractal and Fractional, 7(6), 448. https://doi.org/10.3390/fractalfract7060448