Assessment of Texture Features for Bermudagrass (Cynodon dactylon) Detection in Sugarcane Plantations

 , , , ,
, , , , 
Abstract
:1. Introduction
2. Materials and Methods
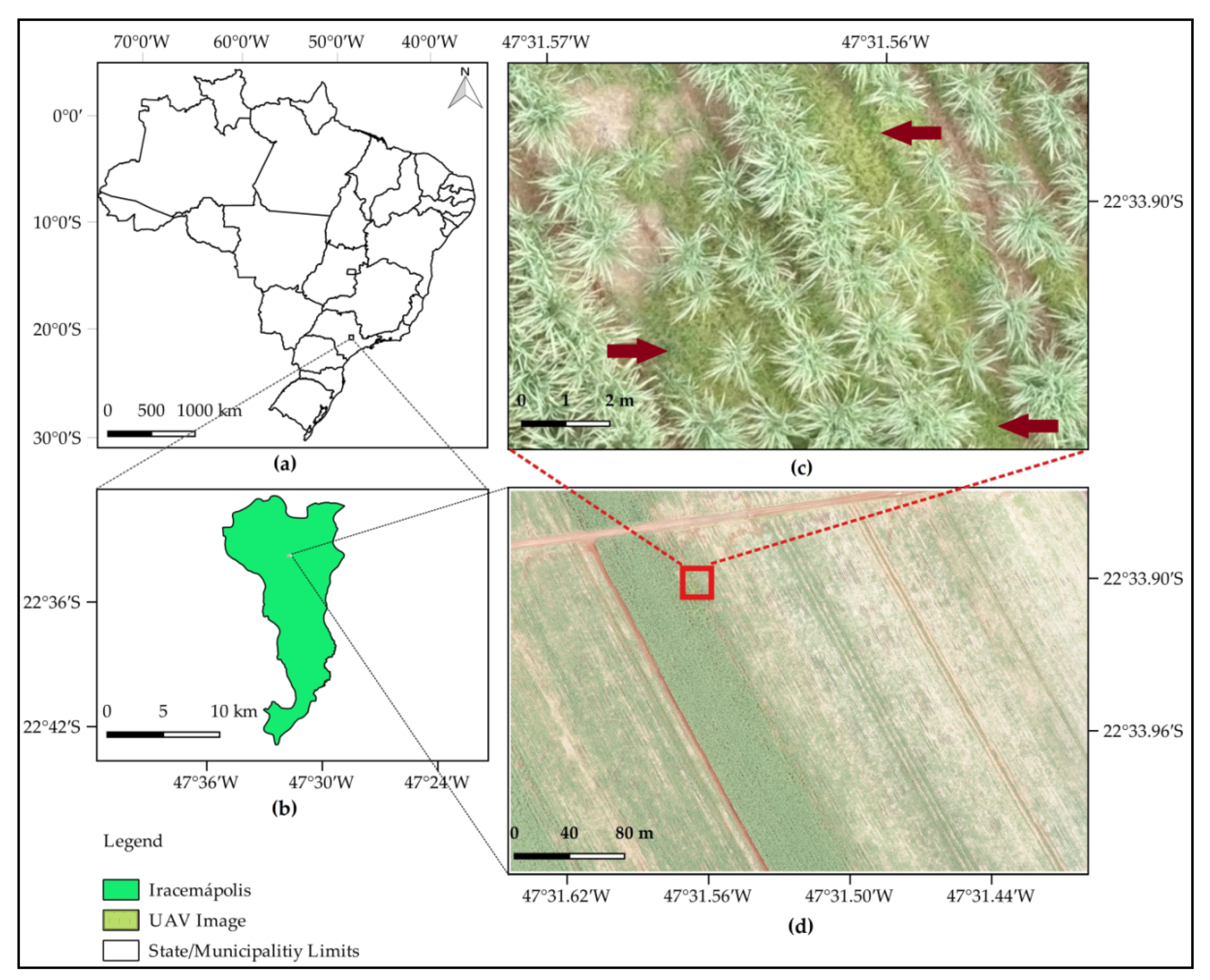
2.1. Study Site and Image Acquisition
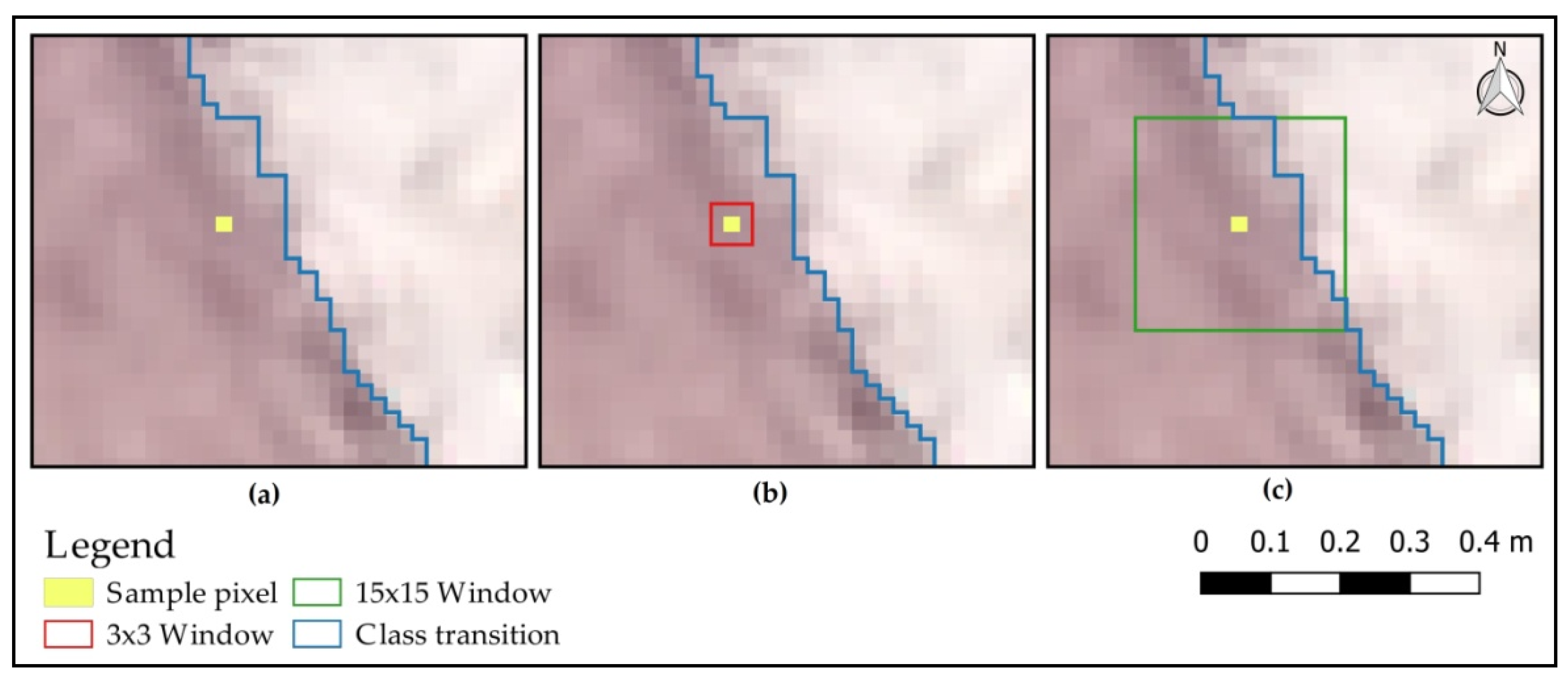
2.2. Feature Extraction
2.3. Classification
3. Results
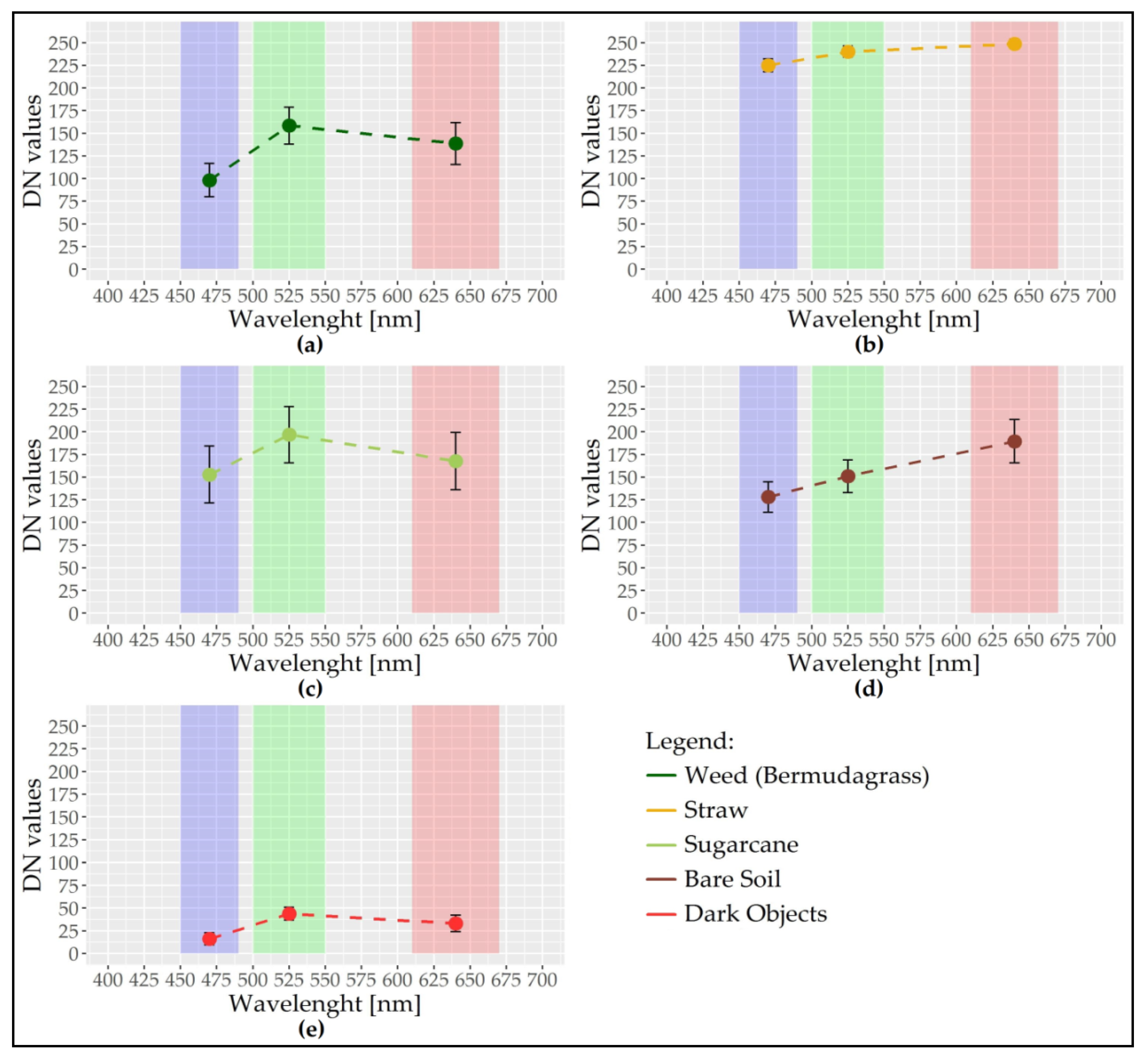
3.1. Spectral Analysis
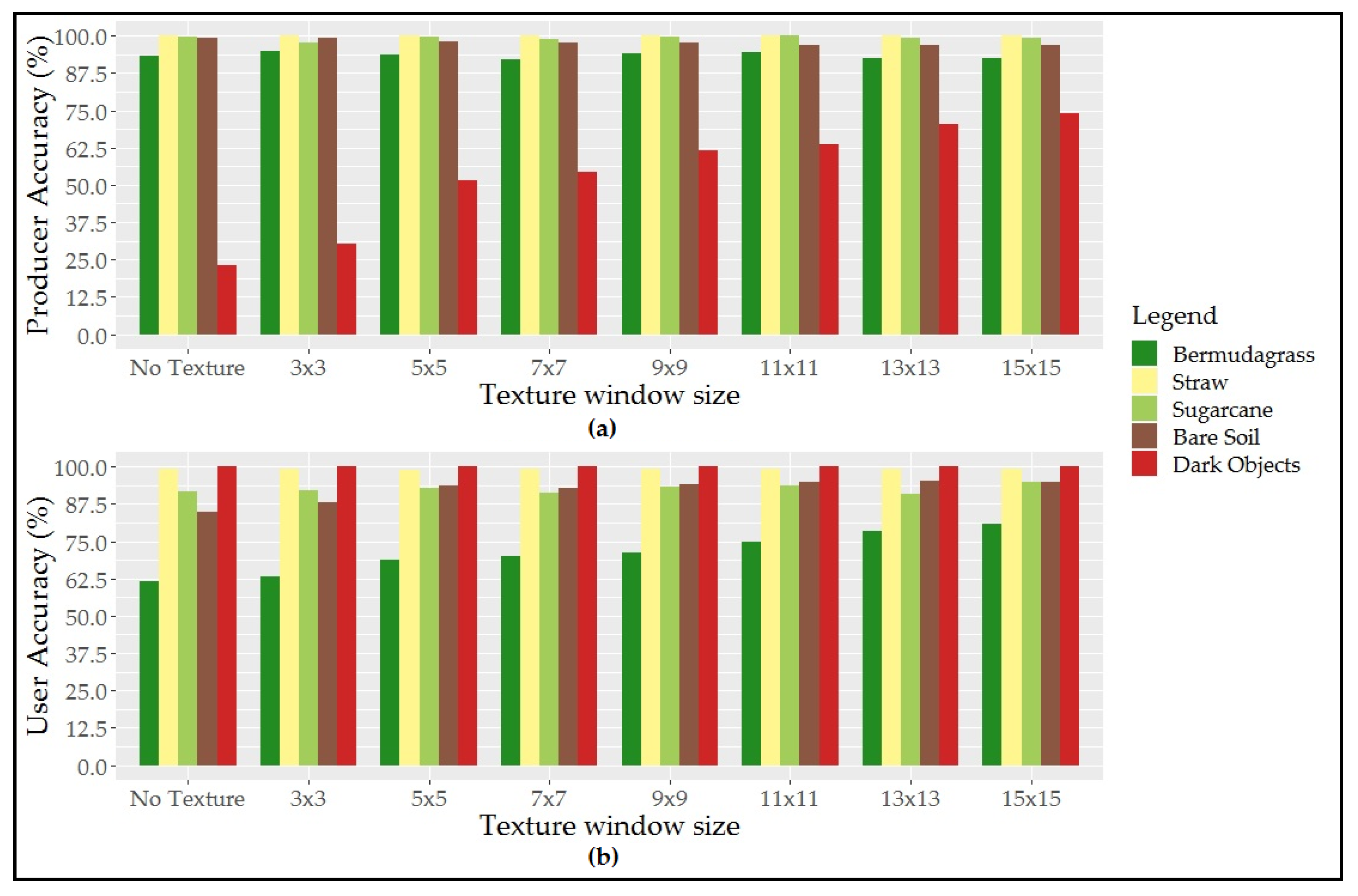
3.2. Error Matrix and Validation Metrics
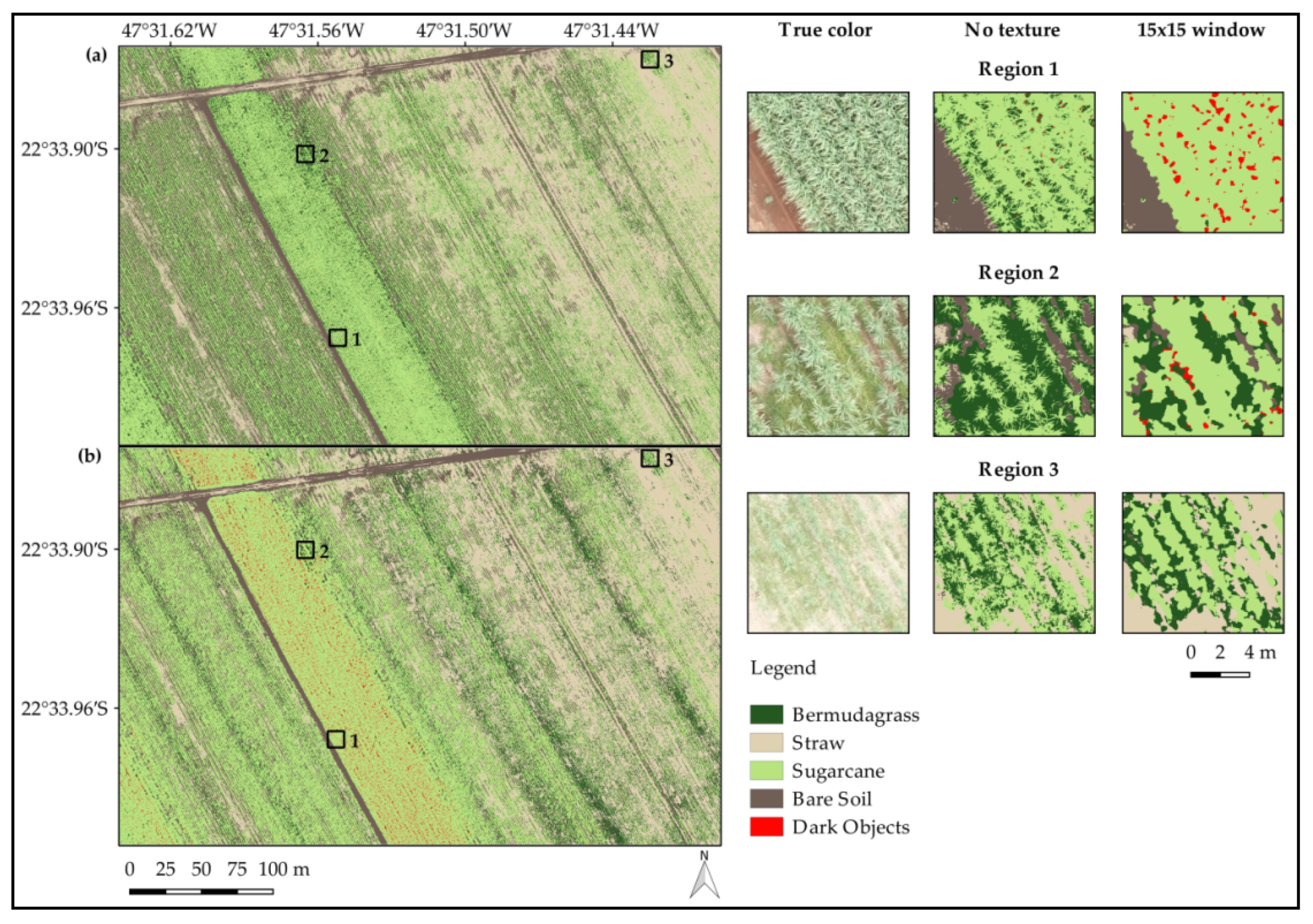
3.3. Classified Images
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yano, I.H.; Alves, J.R.; Santiago, W.E.; Mederos, B.J. Identification of weeds in sugarcane fields through images taken by UAV and random forest classifier. IFAC-PapersOnLine 2016, 49, 415–420. [Google Scholar] [CrossRef]
- Brazilian Union of Sugarcane Industry—UNICA. Available online: http://www.unicadata.com.br (accessed on 6 January 2019).
- Brazilian Ministry of Agriculture Livestock and Food Supply—MAPA. Available online: http://indicadores.agriculta.gov.br/index.htm (accessed on 7 January 2019).
- Huang, Y.K.; Li, W.F.; Zhang, R.Y.; Wang, X.Y. Color Illustration of Diagnosis and Control for Modern Sugarcane Diseases, Pests, and Weeds, 1st ed.; Springer: Singapore, 2018; 420p. [Google Scholar] [CrossRef]
- Aranda, M.A.; Freitas-Astúa, J. Ecology and diversity of plant viruses, and epidemiology of plant virus-induced diseases. Ann. Appl. Biol. 2017, 171, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Bellé, C.; Kaspary, T.E.; Kuhn, P.R.; Schmitt, J.; Lima-Medina, I. Reproduction of Pratylenchus zeae on Weeds. Planta Daninha 2017, 35, 1–8. [Google Scholar] [CrossRef]
- Samson, P.; Sallam, N.; Chandler, K. Pests of Australian Sugarcane: Field Guide, 1st ed.; BSES Limited: Indooroopilly, Australia, 2013; 97p. [Google Scholar]
- Johansen, K.; Sallam, N.; Robson, A.; Samson, P.; Chandler, K.; Derby, L.; Eaton, A.; Jennings, J. Using GeoEye-1 Imagery for Multi-Temporal Object-Based Detection of Canegrub Damage in Sugarcane Fields in Queensland, Australia. GISci. Remote Sens. 2018, 55, 285–305. [Google Scholar] [CrossRef]
- Fontenot, D.P.; Griffin, J.L.; Bauerle, M.J. Bermudagrass (Cynodondactylon) competition with sugarcane at planting. J. Am. Soc. Sugar Cane Technol. 2016, 36, 19–30. [Google Scholar]
- Paula, R.J.D.; Esposti, C.D.; Toffoli, C.R.D.; Ferreira, P.S. Weed interference in the initial growth of meristem grown sugarcane plantlets. RevistaBrasileira de Engenharia Agrícola e Ambiental 2018, 22, 634–639. [Google Scholar] [CrossRef]
- Concenco, G.; Leme Filho, J.R.A.; Silva, C.J.; Marques, R.F.; Silva, L.B.X.; Correia, I.V.T. Weed Occurrence in Sugarcane as Function of Variety and Ground Straw Management. Planta Daninha 2016, 34, 219–228. [Google Scholar] [CrossRef]
- Fernández-Quintanilla, C.; Peña, J.M.; Andújar, D.; Dorado, J.; Ribeiro, A.; López-Granados, F. Is the current state of the art of weed monitoring suitable for site-specific weed management in arable crops? Weed Res. 2018, 58, 259–272. [Google Scholar] [CrossRef]
- Caturegli, L.; Lulli, F.; Foschi, L.; Guglielminetti, L.; Bonari, E.; Volterrani, M. Turfgrass spectral reflectance: Simulating satellite monitoring of spectral signatures of main C3 and C4 species. Precis. Agric. 2015, 16, 297–310. [Google Scholar] [CrossRef]
- Motohka, T.; Nasahara, K.; Oguma, H.; Tsuchida, S. Applicability of green-red vegetation index for remote sensing of vegetation phenology. Remote Sens. 2010, 2, 2369–2387. [Google Scholar] [CrossRef]
- Pérez-Ortiz, M.; Penã, J.M.; Gutiérrez, P.A.; Torres-Sánches, J.; Hervás-Martinez, C.; López-Granados, F. Selecting patterns and features for between-and within-crop-row weed mapping using UAV-imagery. Expert Syst. Appl. 2016, 47, 85–94. [Google Scholar] [CrossRef]
- David, L.C.G.; Ballado, A.H. Vegetation indices and textures in object-based weed detection from UAV imagery. In Proceedings of the 6th IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 25–27 November 2016; pp. 273–278. [Google Scholar] [CrossRef]
- Bah, M.; Hafiane, A.; Canals, R. Deep Learning with Unsupervised Data Labeling for Weed Detection in Line Crops in UAV Images. Remote Sens. 2018, 10, 1690. [Google Scholar] [CrossRef]
- Castro, A.I.; Penã, J.M.; Torres-Sánches, J.; Jiménez-Brenes, F.; López-Granados, F. Mapping Cynodondactylon in vineyards using UAV images for site-specific weed control. Adv. Anim.Biosci. 2017, 8, 267–271. [Google Scholar] [CrossRef]
- Haralick, R.M. Statistical and structural approaches to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Hall-Beyer, M. Practical guidelines for choosing GLCM textures to use in landscape classification tasks over a range of moderate spatial scales. Int. J. Remote Sens. 2017, 38, 1312–1338. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef] [Green Version]
- Hall, M.; Frank, E.; Holmes, G.; Pfahringer, B.; Reutemann, P.; Witten, I.H. The WEKA data mining software: An update. ACM SIGKDD Explor.Newslett. 2009, 11, 10–18. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Yano, I.H.; Santiago, W.E.; Alves, J.R.; Mota, L.T.M.; Teruel, B. Choosing classifier for weed identification in sugarcane fields through images taken by UAV. Bulg. J. Agric. Sci. 2017, 23, 491–497. [Google Scholar]
- Dony, R.D.; Haykin, S. Neural network approaches to image compression. Proc. IEEE 1995, 83, 288–303. [Google Scholar] [CrossRef]
- Moriya, E.A.S.; Imai, N.N.; Tommaselli, A.M.G.; Miyoshi, G.T. Mapping mosaic virus in sugarcane based on hyperspectral images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 740–748. [Google Scholar] [CrossRef]
- Du, Y.; Chang, C.I.; Ren, H.; Chang, C.C.; Jensen, J.O.; D’Amico, F.M. New hyperspectral discrimination measure for spectral characterization. Opt. Eng. 2004, 43, 1777–1787. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Nebiker, S.; Annen, A.; Scherrer, M.; Oesch, D. A light-weight multispectral sensor for micro UAV—Opportunities for very high resolution airborne remote sensing. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences; ISPRS: Beijing, China, 2008; Volume 37-B1, pp. 1193–1199. [Google Scholar]
- Candiago, S.; Remondino, F.; Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- Sony STARVIS®/Exmor®—Camera Sensor Technology Overview. Available online: https://www.ptgrey.com/exmor-r-starvis (accessed on 12 February 2019).
- Ponzoni, F.J.; Shimabukuro, Y.E.; Kuplich, T.M. Sensoriamento Remoto No Estudo da Vegetação, 2nd ed.; Oficina de Textos: São José dos Campos, Brazil, 2012; 176p. [Google Scholar]
- Formaggio, A.R.; Sanches, I.D. Sensoriamento Remoto em Agricultura, 1st ed.; Oficina de Textos: São José dos Campos, Brazil, 2017; 288p. [Google Scholar]
- Pereira, R.M.; Casaroli, D.; Vellame, L.M.; Alves Júnior, J.; Evangelista, A.W.P. Sugarcane leaf area estimate obtained from the corrected Normalized Difference Vegetation Index (NDVI). Pesqui. Agropecu. Trop. 2016, 46, 140–148. [Google Scholar] [CrossRef] [Green Version]
- Montandon, L.M.; Small, E.E. The impact of soil reflectance on the quantification of the green vegetation fraction from NDVI. Remote Sens. Environ. 2008, 112, 1835–1845. [Google Scholar] [CrossRef]
- Formaggio, A.R.; Epiphanio, J.C.N.; Valeriano, M.M.; Oliveira, J.B. Comportamento espectral (450-2.450 nm) de solos tropicais de São Paulo. Revista Brasileira de Ciência do Solo 1996, 20, 467–474. [Google Scholar]
- Demattê, J.A.M.; Silva, M.L.S.; Rocha, G.C.; Carvalho, L.A.; Formaggio, A.R.; Firme, L.P. Variações espectrais em solos submetidos à aplicação de torta de filtro. Revista Brasileira de Ciência do Solo 2005, 29, 317–326. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep learning classification of land cover and crop types using remote sensing data. IEEE Geosc. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Guirado, E.; Tabik, S.; Alcaraz-Segura, D.; Cabello, J.; Herrera, F. Deep-learning versus OBIA for scattered shrub detection with Google earth imagery: Ziziphus Lotus as case study. Remote Sens. 2017, 9, 1220. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, J.; Yu, F.; Wan, S.; Han, Y.; Wang, J.; Wang, G. Segmentation model based on convolutional neural networks for extracting vegetation from Gaofen-2images. J. Appl. Remote Sens. 2018, 12, 042804. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Description | Image |
|---|---|---|
| Weed (Bermudagrass) | Dark green gramineous weed that grows between and within crop rows. |  |
| Straw | Soil covered with sugarcane straws (light beige). Occurrence between and within crop rows. |  |
| Sugarcane | Green sugarcane plants, crow diameter ranging from 0.5 m to 2.0 m. |  |
| Bare soil | Dark brown soil with no cover and some points not well drained. Occurrence is between and within crop rows. |  |
| Dark objects | Dark objects (shadows) generated by overlapping sugarcane plants. |  |
| NoTexture | With Texture (Window Size) | |||||||
|---|---|---|---|---|---|---|---|---|
| 3 × 3 | 5 × 5 | 7 × 7 | 9 × 9 | 11 × 11 | 13 × 13 | 15 × 15 | ||
| OA | 83.00 | 84.40 | 88.52 | 88.56 | 90.60 | 91.04 | 91.80 | 92.54 |
| Reference: without Texture | Reference: with Texture (15 × 15 Window Size) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BG | ST | SC | BS | DO | BG | ST | SC | BS | DO | ||||
| Classified as | BG | 466 | 0 | 2 | 0 | 291 | Classified as | BG | 462 | 0 | 3 | 0 | 106 |
| ST | 0 | 500 | 0 | 4 | 0 | ST | 0 | 500 | 0 | 4 | 0 | ||
| SC | 19 | 0 | 498 | 0 | 27 | SC | 27 | 0 | 497 | 12 | 8 | ||
| BS | 15 | 0 | 0 | 496 | 67 | BS | 11 | 0 | 0 | 484 | 16 | ||
| DO | 0 | 0 | 0 | 0 | 115 | DO | 0 | 0 | 0 | 0 | 370 | ||
| Crop | Weed/Disease | OA (%) | Classifier | Features Used | Reference |
|---|---|---|---|---|---|
| Eggplants | Gramineous * | 75.4 | SVM | VI + Texture | [16] |
| Sugarcane | Sourgrass | 77.9 | RF | Spectral | [1] |
| Maize | Saltwort | 79.0 | SVM | Spectral + VI + Texture | [15] |
| Sugarcane | Bermudagrass | 83.0 | RF | Spectral + VI | This paper |
| Vineyards | Bermudagrass | 83.3 | RBC | Spectral + VI | [18] |
| Sugarcane | Tridax daisy | 85.5 | RF | Spectral | [1] |
| Sugarcane | Peppergrass, Shoo-fly plant and Signalgrass | 91.6 | ANNs | Spectral | [25] |
| Sugarcane | Mosaic Virus | 92.5 | SID | Multispectral | [27] |
| Sugarcane | Bermudagrass | 92.5 | RF | Spectral + VI + Texture | This paper |
| Beans | Thistles potato sprouts | 94.8 | CNNs | Spectral + VI + Texture | [17] |
| Sunflower | Pigweed, Bindweed and Mustard | 95.5 | SVM | Spectral + VI + Texture | [15] |
| Spinach | Thistles | 96.9 | CNNs | Spectral + VI + Texture | [17] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Girolamo-Neto, C.D.; Sanches, I.D.; Neves, A.K.; Prudente, V.H.R.; Körting, T.S.; Picoli, M.C.A.; Aragão, L.E.O.e.C.d. Assessment of Texture Features for Bermudagrass (Cynodon dactylon) Detection in Sugarcane Plantations. Drones 2019, 3, 36. https://doi.org/10.3390/drones3020036
Girolamo-Neto CD, Sanches ID, Neves AK, Prudente VHR, Körting TS, Picoli MCA, Aragão LEOeCd. Assessment of Texture Features for Bermudagrass (Cynodon dactylon) Detection in Sugarcane Plantations. Drones. 2019; 3(2):36. https://doi.org/10.3390/drones3020036
Chicago/Turabian StyleGirolamo-Neto, Cesare Di, Ieda Del’Arco Sanches, Alana Kasahara Neves, Victor Hugo Rohden Prudente, Thales Sehn Körting, Michelle Cristina Araujo Picoli, and Luiz Eduardo Oliveira e Cruz de Aragão. 2019. "Assessment of Texture Features for Bermudagrass (Cynodon dactylon) Detection in Sugarcane Plantations" Drones 3, no. 2: 36. https://doi.org/10.3390/drones3020036
APA StyleGirolamo-Neto, C. D., Sanches, I. D., Neves, A. K., Prudente, V. H. R., Körting, T. S., Picoli, M. C. A., & Aragão, L. E. O. e. C. d. (2019). Assessment of Texture Features for Bermudagrass (Cynodon dactylon) Detection in Sugarcane Plantations. Drones, 3(2), 36. https://doi.org/10.3390/drones3020036