
A Practical Validation of Uncooled Thermal Imagers for Small RPAS

 ,
,  ,
,  , and
, and
Abstract
:1. Introduction
Previous Work
2. Materials and Methods
2.1. RPAS Airframes and Cameras
2.2. Blackbody Indoor Camera Validation
2.2.1. Thermal Radiation
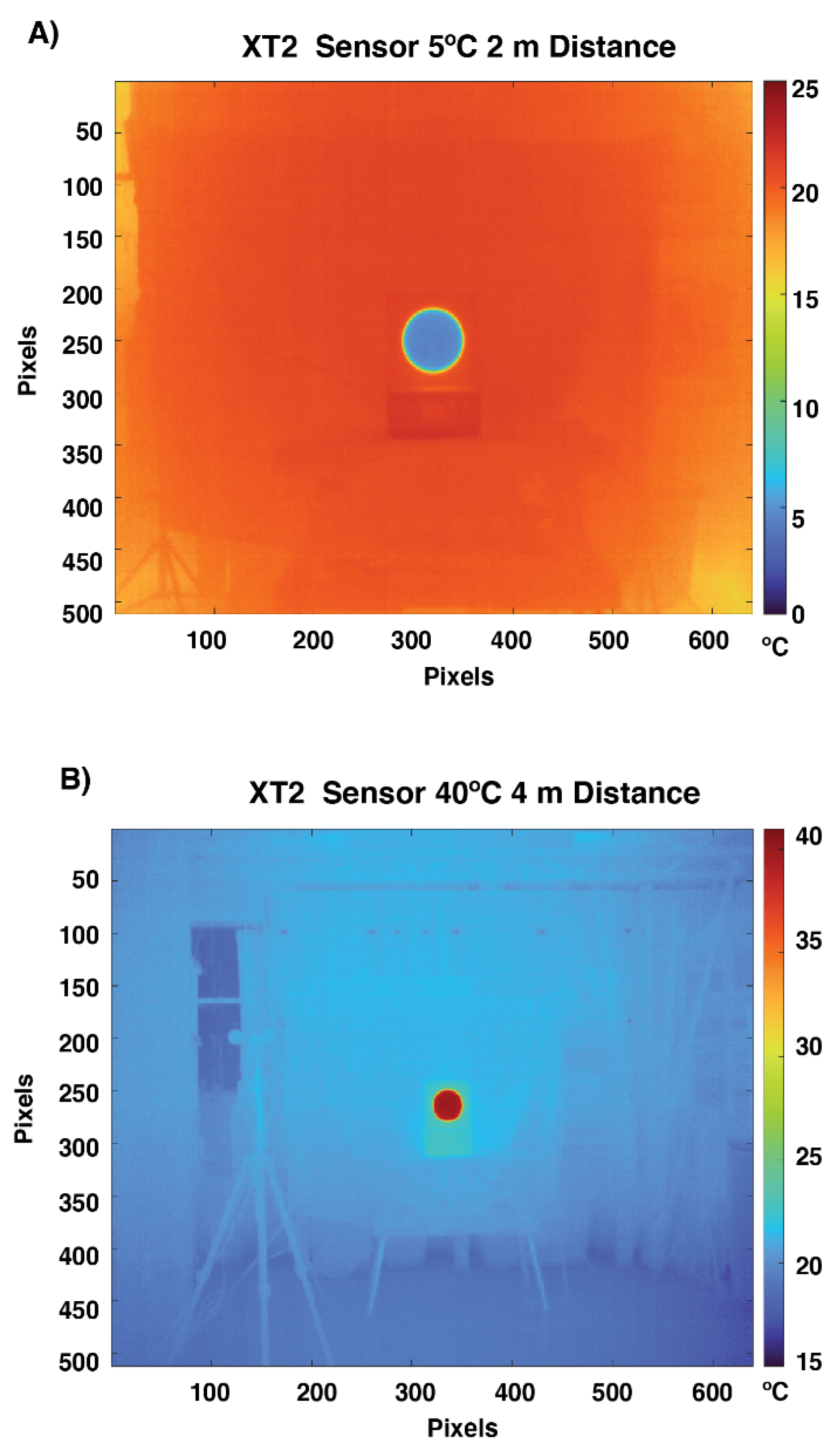
2.2.2. Indoor Camera Validation—Blackbody Radiator
2.3. Outdoor Field Trial
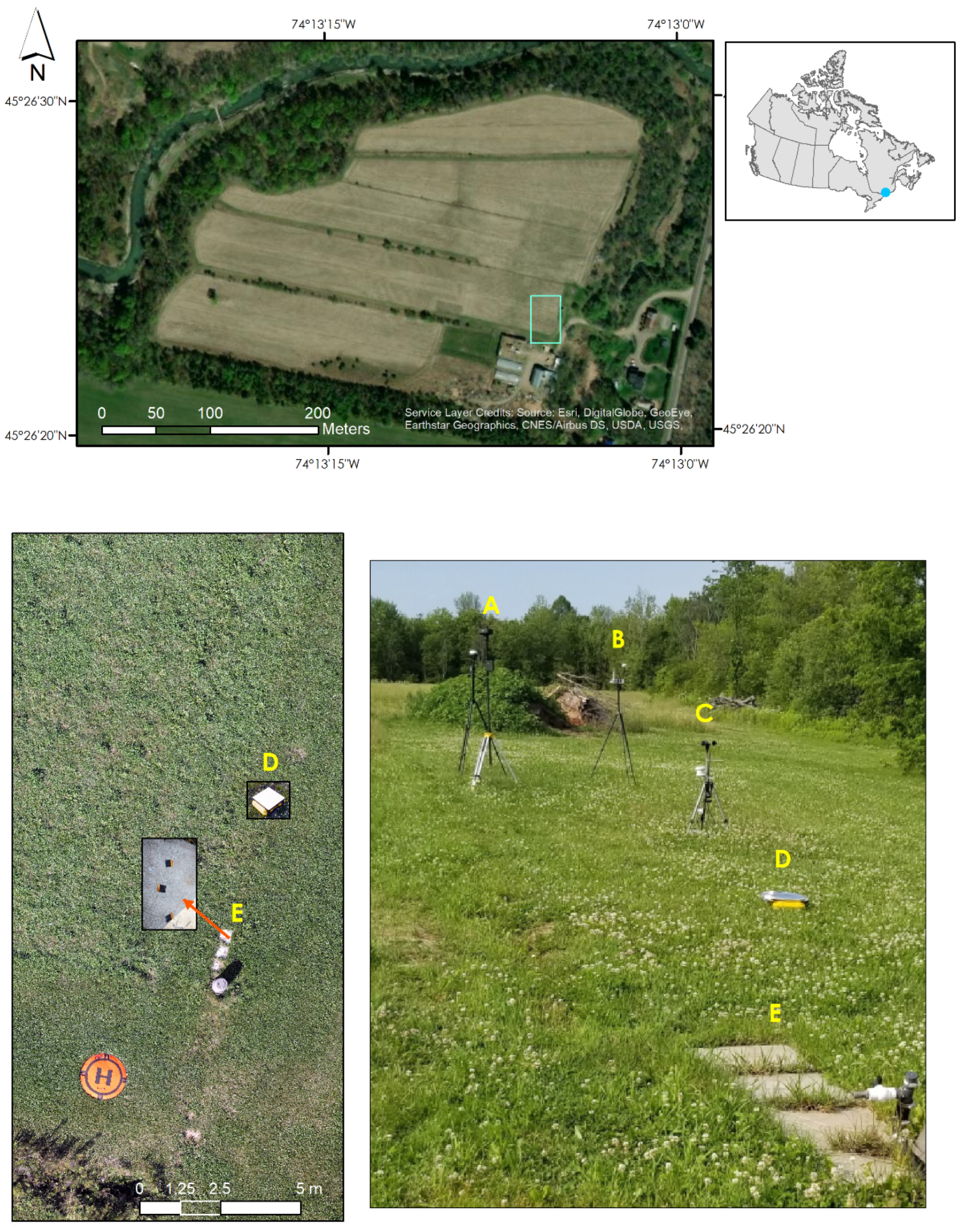
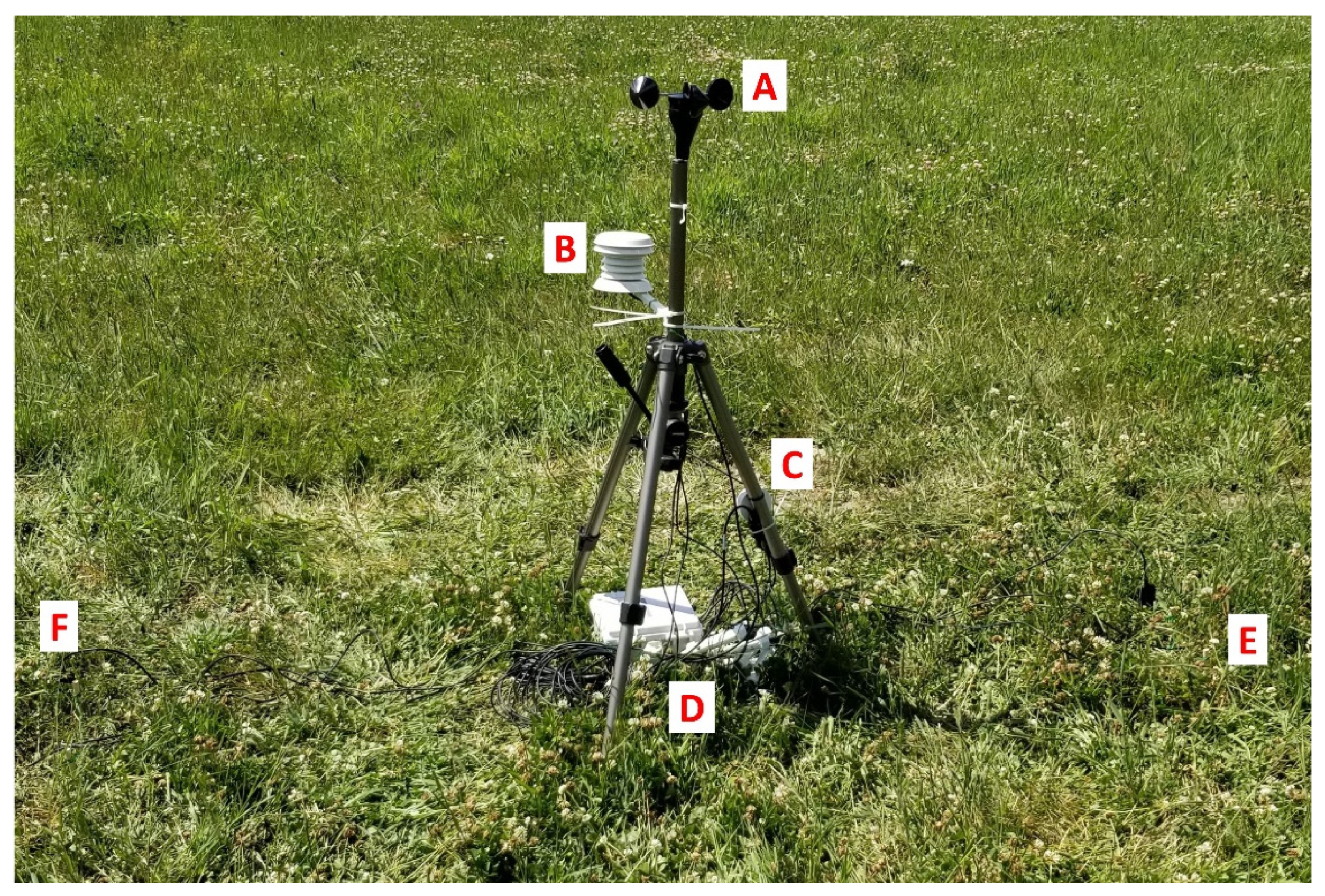
2.3.1. Study Site Set-up
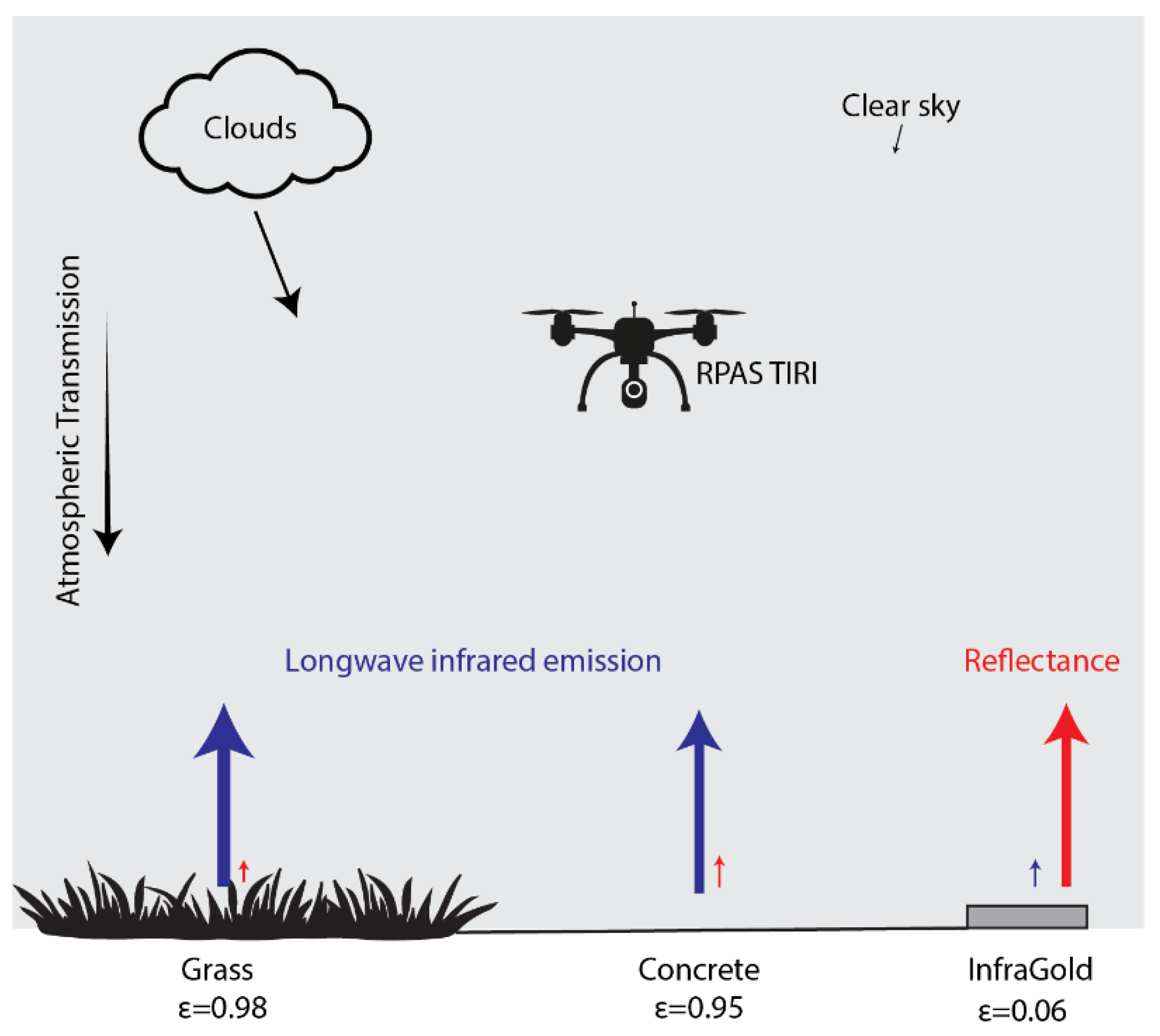
2.3.2. RPAS TIRI Acquisition
3. Results
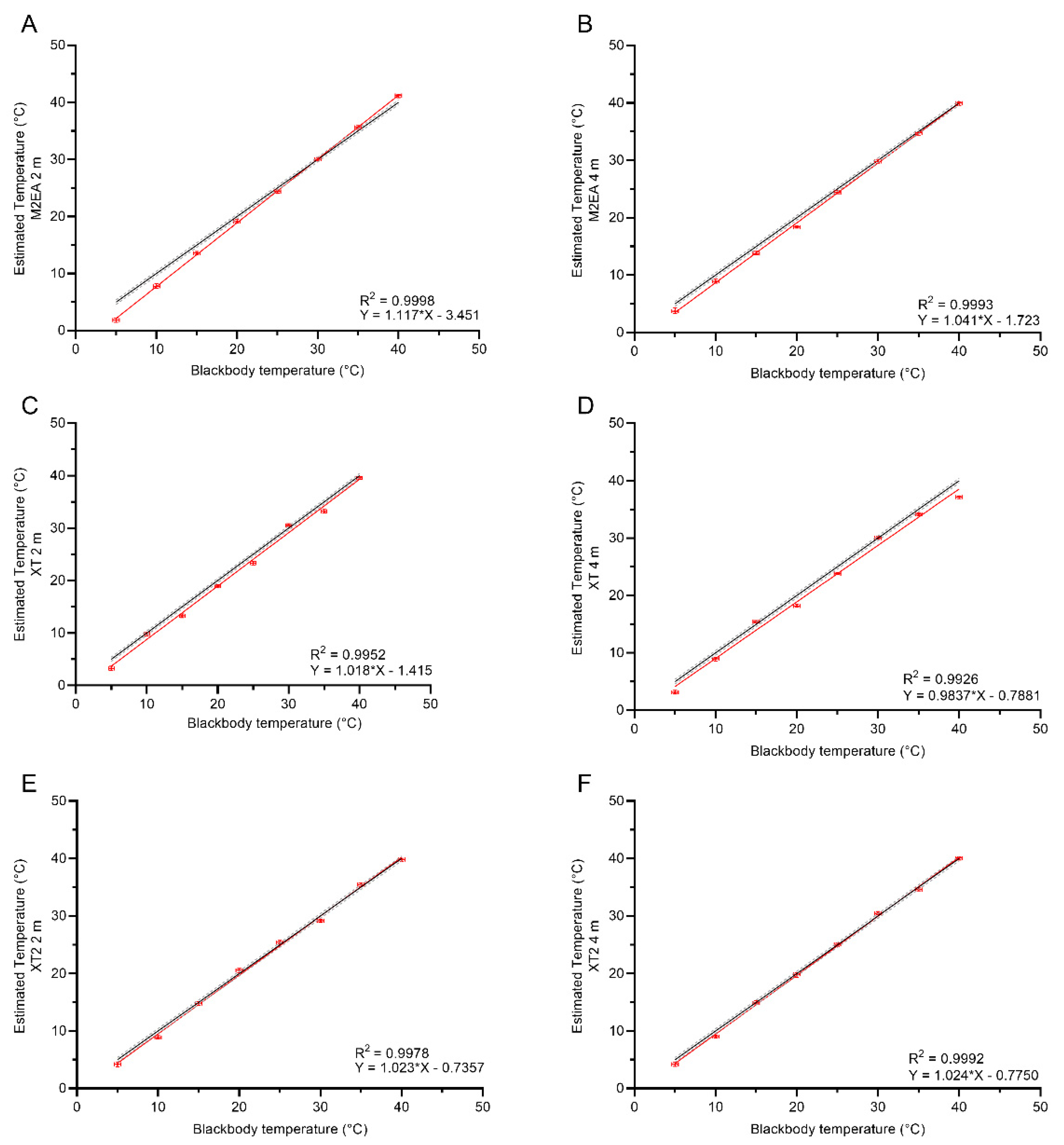
3.1. Indoor Blackbody Validation
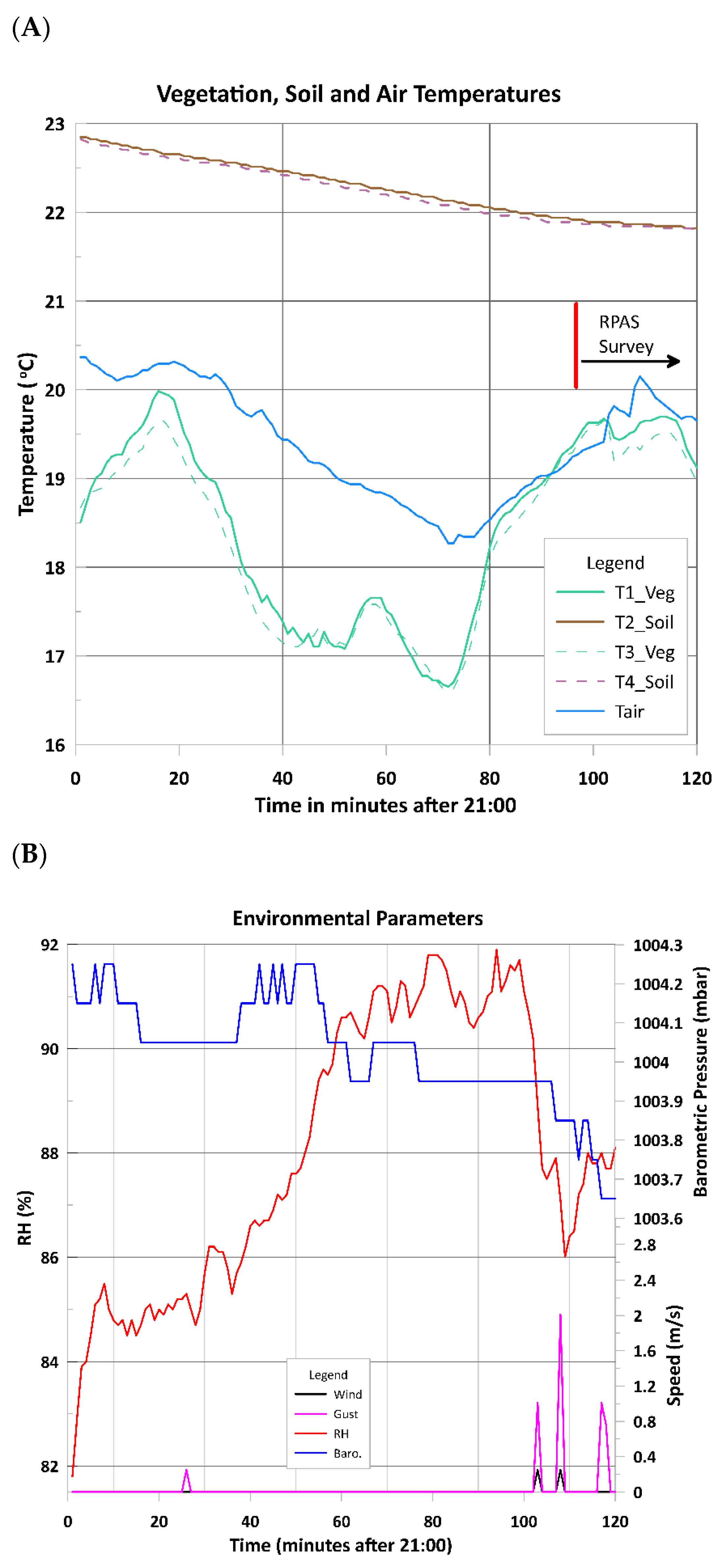
3.2. Outdoor Field Trial
Environmental Conditions
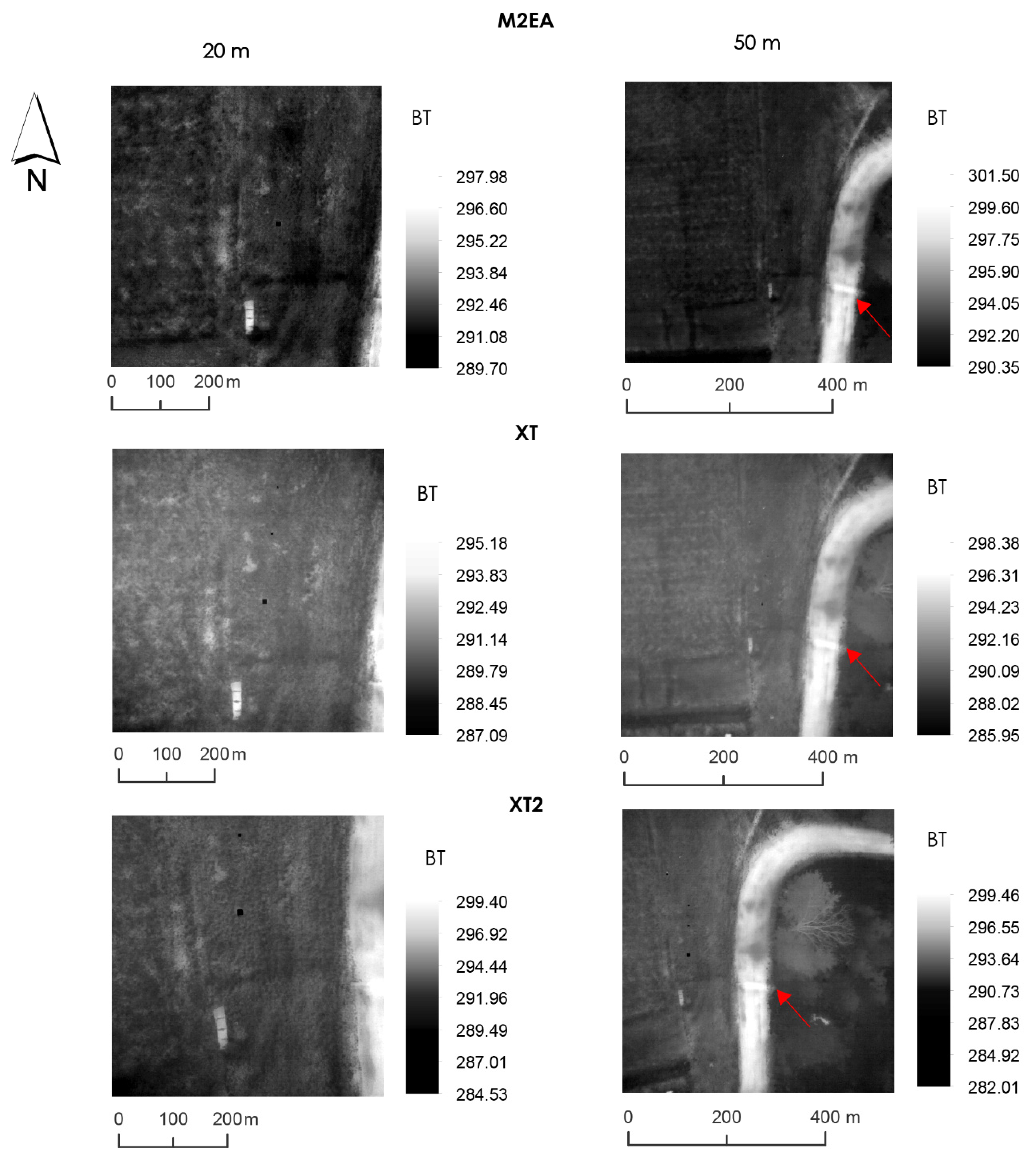
3.3. TIRI
3.3.1. Brightness Temperature
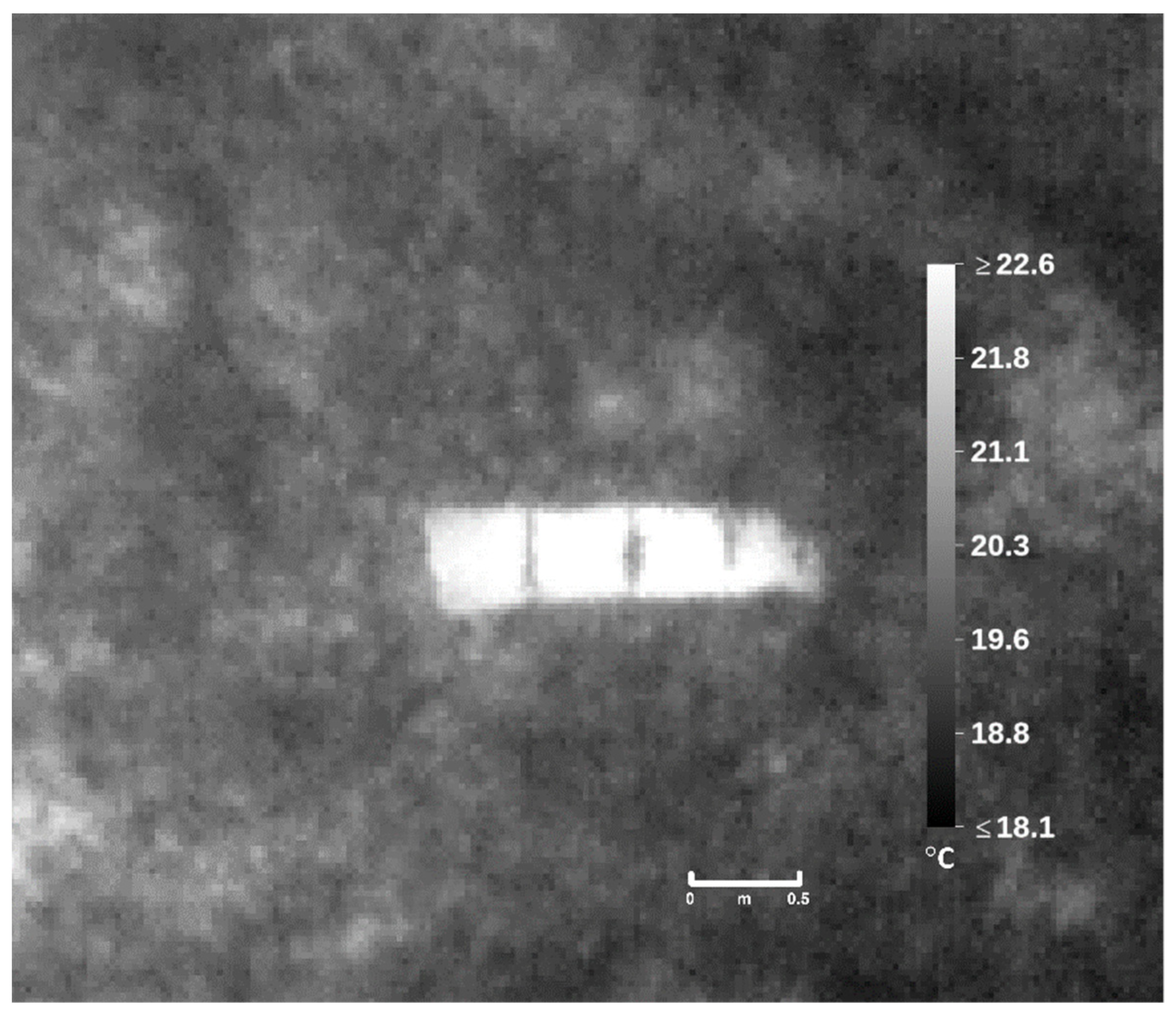
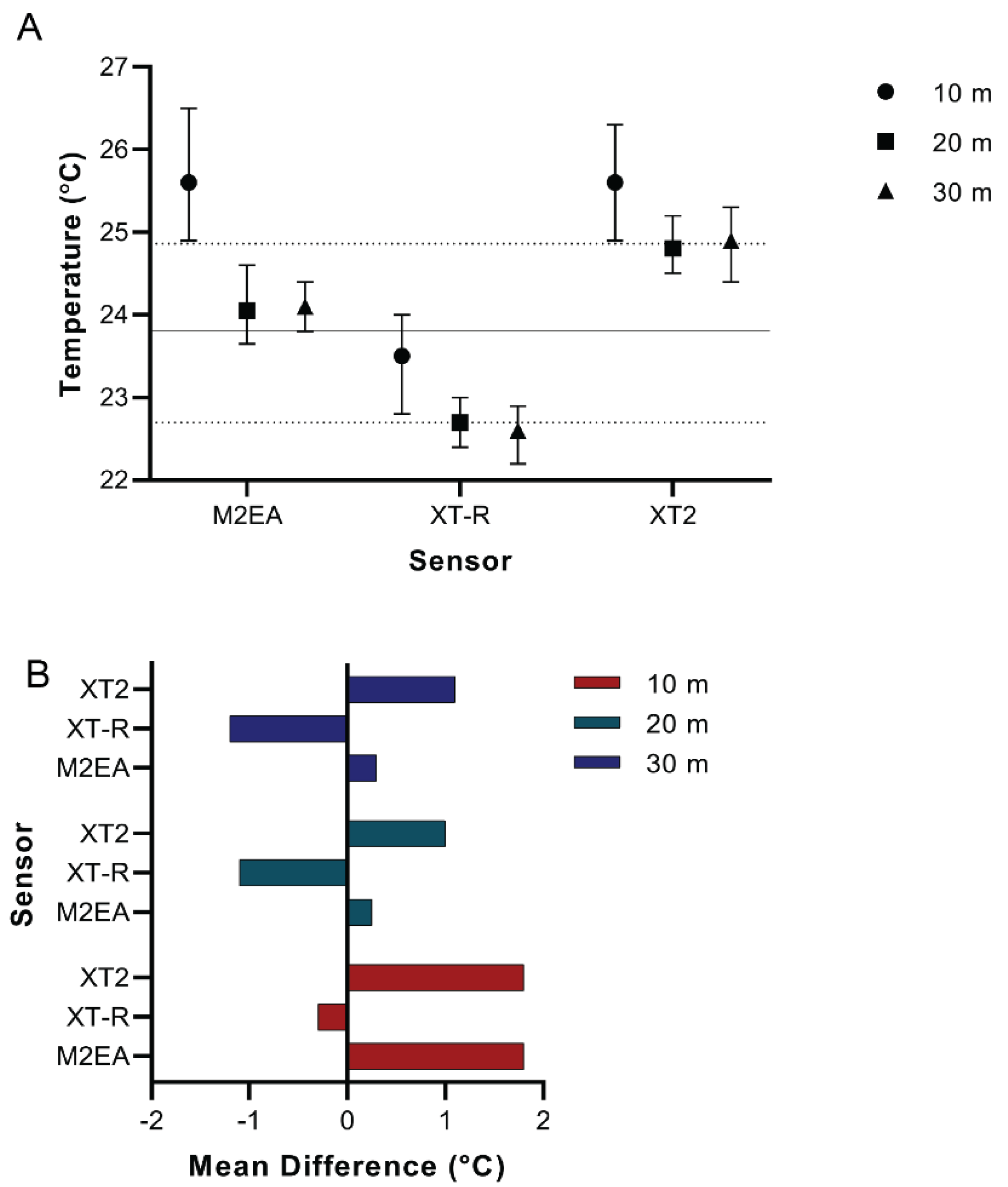
3.3.2. InfraGold Panel
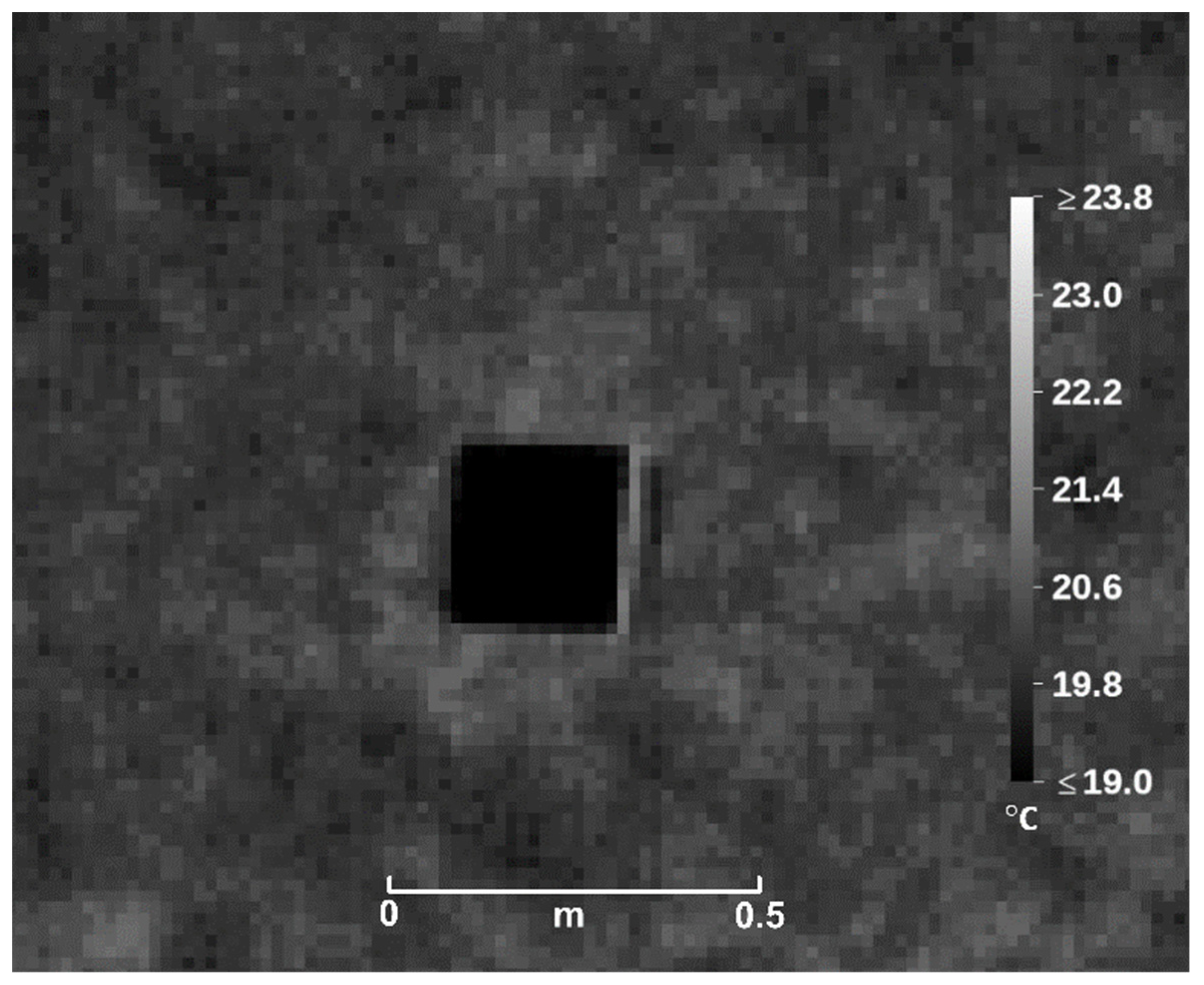
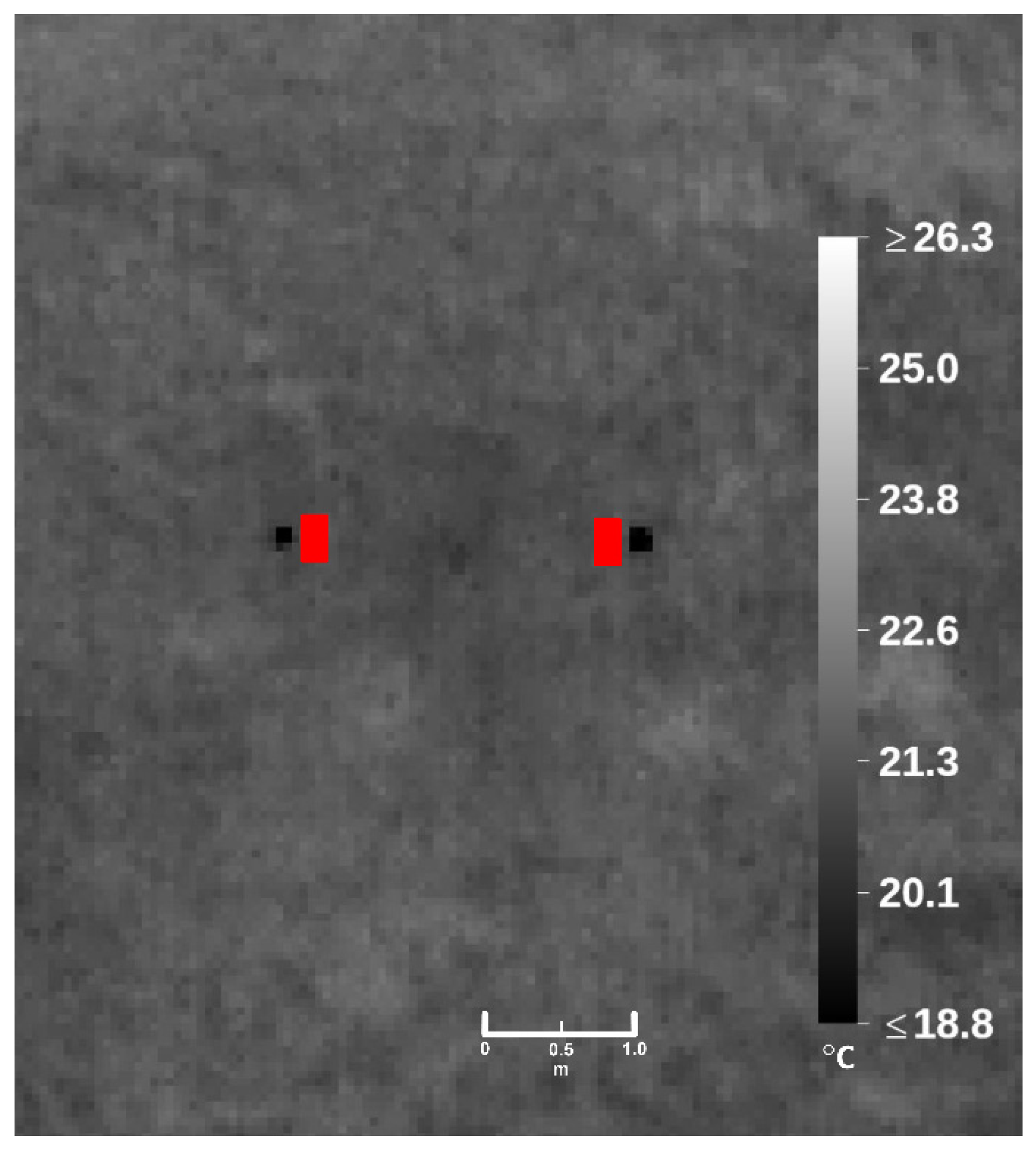
3.3.3. Concrete Patio Stone Target
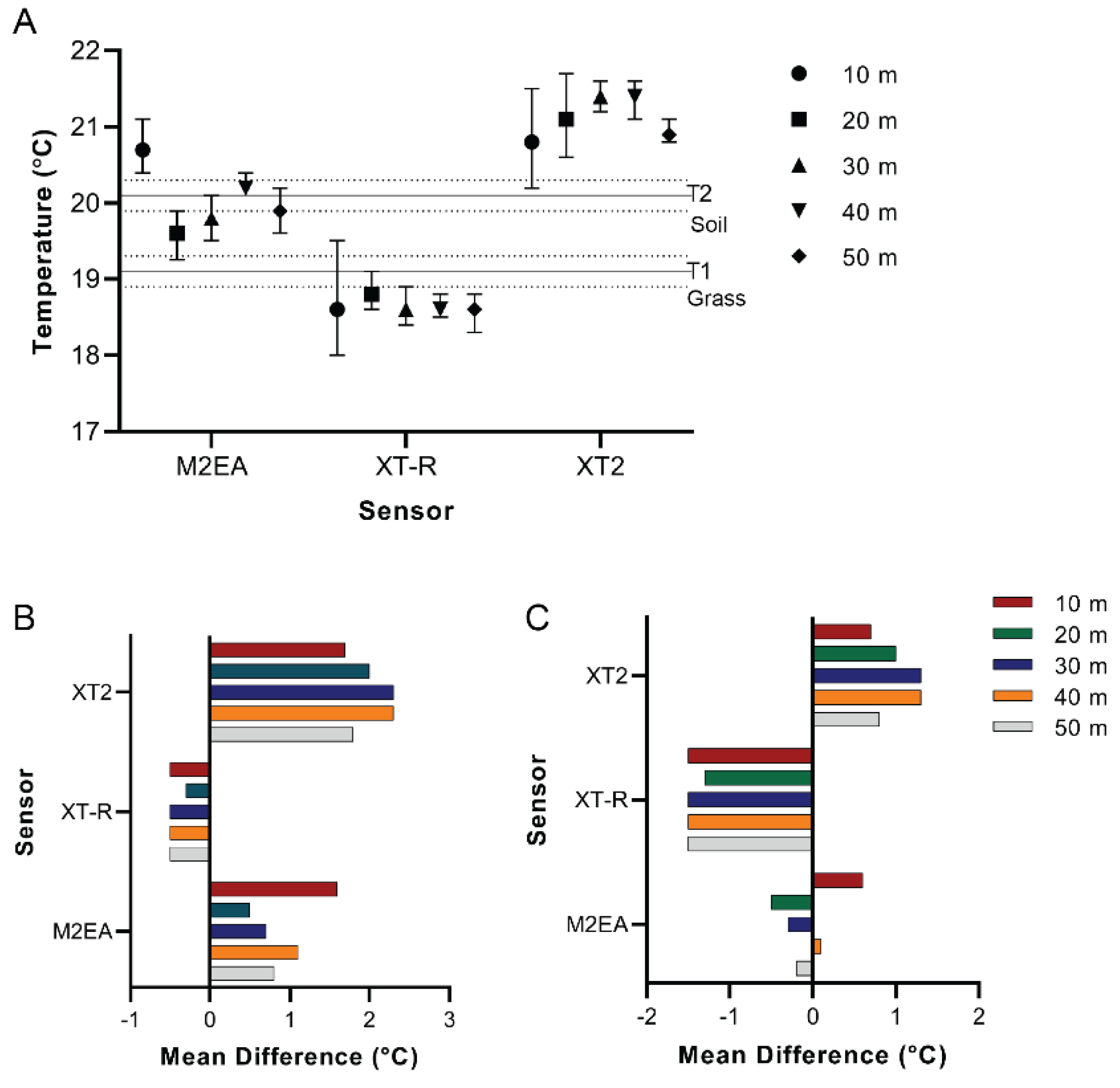
3.3.4. Grass and Soil
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera | Distance (m) | Mean Blackbody Temp. (+/−0.4 °C) | Mean Measured Temp. (°C) | Stdev. (°C) |
|---|---|---|---|---|
| M2EA | 2 | 5 | 1.87 | 0.13 |
| M2EA | 2 | 10 | 7.77 | 0.12 |
| M2EA | 2 | 15 | 13.57 | 0.11 |
| M2EA | 2 | 20 | 19.10 | 0.10 |
| M2EA | 2 | 25 | 24.37 | 0.11 |
| M2EA | 2 | 30 | 30.03 | 0.10 |
| M2EA | 2 | 35 | 35.63 | 0.11 |
| M2EA | 2 | 40 | 41.20 | 0.10 |
| M2EA | 4 | 5 | 3.70 | 0.16 |
| M2EA | 4 | 10 | 8.90 | 0.15 |
| M2EA | 4 | 15 | 13.77 | 0.10 |
| M2EA | 4 | 20 | 18.35 | 0.10 |
| M2EA | 4 | 25 | 24.40 | 0.11 |
| M2EA | 4 | 30 | 29.80 | 0.12 |
| M2EA | 4 | 35 | 34.77 | 0.13 |
| M2EA | 4 | 40 | 39.97 | 0.13 |
| XT-R | 2 | 5 | 3.23 | 0.11 |
| XT-R | 2 | 10 | 9.83 | 0.09 |
| XT-R | 2 | 15 | 13.27 | 0.09 |
| XT-R | 2 | 20 | 18.93 | 0.07 |
| XT-R | 2 | 25 | 23.33 | 0.08 |
| XT-R | 2 | 30 | 30.53 | 0.07 |
| XT-R | 2 | 35 | 33.20 | 0.09 |
| XT-R | 2 | 40 | 39.60 | 0.08 |
| XT-R | 4 | 5 | 3.13 | 0.10 |
| XT-R | 4 | 10 | 8.97 | 0.10 |
| XT-R | 4 | 15 | 15.43 | 0.07 |
| XT-R | 4 | 20 | 18.17 | 0.08 |
| XT-R | 4 | 25 | 23.80 | 0.06 |
| XT-R | 4 | 30 | 30.00 | 0.06 |
| XT-R | 4 | 35 | 34.13 | 0.07 |
| XT-R | 4 | 40 | 37.13 | 0.08 |
| XT2 | 2 | 5 | 4.23 | 0.11 |
| XT2 | 2 | 10 | 8.87 | 0.10 |
| XT2 | 2 | 15 | 14.80 | 0.09 |
| XT2 | 2 | 20 | 20.57 | 0.10 |
| XT2 | 2 | 25 | 25.43 | 0.08 |
| XT2 | 2 | 30 | 29.17 | 0.08 |
| XT2 | 2 | 35 | 35.43 | 0.08 |
| XT2 | 2 | 40 | 39.80 | 0.08 |
| XT2 | 4 | 5 | 4.23 | 0.12 |
| XT2 | 4 | 10 | 9.03 | 0.10 |
| XT2 | 4 | 15 | 14.90 | 0.10 |
| XT2 | 4 | 20 | 19.90 | 0.08 |
| XT2 | 4 | 25 | 25.07 | 0.09 |
| XT2 | 4 | 30 | 30.43 | 0.09 |
| XT2 | 4 | 35 | 34.57 | 0.08 |
| XT2 | 4 | 40 | 40.07 | 0.10 |
References
- Stanković, M.; Mirza, M.M.; Karabiyik, U. UAV Forensics: DJI Mini 2 Case Study. Drones 2021, 5, 49. [Google Scholar] [CrossRef]
- Burgués, J.; Marco, S. Environmental chemical sensing using small drones: A review. Sci. Total Environ. 2020, 748, 141172. [Google Scholar] [CrossRef]
- Lakshman, S.A.; Ebenezer, D. Ebenezer, Integration of internet of things and drones and its future applications. Mater. Today Proc. 2021, 47, 944–949. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Witczuk, J.; Pagacz, S.; Zmarz, A.; Cypel, M. Exploring the feasibility of unmanned aerial vehicles and thermal imaging for ungulate surveys in forests—Preliminary results. Int. J. Remote Sens. 2018, 39, 5504–5521. [Google Scholar] [CrossRef]
- Ellsäßer, F.; Röll, A.; Ahongshangbam, J.; Waite, P.-A.; Schuldt, B.; Hölscher, D. Predicting Tree Sap Flux and Stomatal Conductance from Drone-Recorded Surface Temperatures in a Mixed Agroforestry System—A Machine Learning Approach. Remote Sens. 2020, 12, 4070. [Google Scholar] [CrossRef]
- Alekseychik, P.; Katul, G.; Korpela, I.; Launiainen, S. Eddies in motion: Visualizing boundary-layer turbulence above an open boreal peatland using UAS thermal videos. Atmos. Meas. Tech. 2021, 14, 3501–3521. [Google Scholar] [CrossRef]
- Hyun, C.-U.; Park, M.; Lee, W.Y. Remotely Piloted Aircraft System (RPAS)-Based Wildlife Detection: A Review and Case Studies in Maritime Antarctica. Animals 2020, 10, 2387. [Google Scholar] [CrossRef]
- Ireland, A.W.; Palandro, D.A.; Garas, V.Y.; Woods, R.W.; Davi, R.A.; Butler, J.D.; Gibbens, D.M.; Gibbens, J.S., Jr. Testing unmanned aerial systems for monitoring wildlife at night. Wildl. Soc. Bull. 2019, 43, 182–190. [Google Scholar] [CrossRef] [Green Version]
- Beaver, J.T.; Baldwin, R.W.; Messinger, M.; Newbolt, C.H.; Ditchkoff, S.S.; Silman, M.R. Evaluating the Use of Drones Equipped with Thermal Sensors as an Effective Method for Estimating Wildlife. Wildl. Soc. Bull. 2020, 44, 434–443. [Google Scholar] [CrossRef]
- Scholten, C.N.; Kamphuis, A.J.; Vredevoogd, K.J.; Lee-Strydhorst, K.G.; Atma, J.L.; Shea, C.B.; Lamberg, O.N.; Proppe, D.S. Real-time thermal imagery from an unmanned aerial vehicle can locate ground nests of a grassland songbird at rates similar to traditional methods. Biol. Conserv. 2019, 233, 241–246. [Google Scholar] [CrossRef]
- Melis, M.T.; Da Pelo, S.; Erbì, I.; Loche, M.; Deiana, G.; Demurtas, V.; Meloni, M.A.; Dessì, F.; Funedda, A.; Scaioni, M.; et al. Thermal Remote Sensing from UAVs: A Review on Methods in Coastal Cliffs Prone to Landslides. Remote Sens. 2020, 12, 1971. [Google Scholar] [CrossRef]
- Zhang, R.; Li, H.; Duan, K.; You, S.; Liu, K.; Wang, F.; Hu, Y. Automatic Detection of Earthquake-Damaged Buildings by Integrating UAV Oblique Photography and Infrared Thermal Imaging. Remote Sens. 2020, 12, 2621. [Google Scholar] [CrossRef]
- Marotta, E.; Peluso, R.; Avino, R.; Belviso, P.; Caliro, S.; Carandente, A.; Chiodini, G.; Macedonio, G.; Avvisati, G.; Marfè, B. Thermal Energy Release Measurement with Thermal Camera: The Case of La Solfatara Volcano (Italy). Remote Sens. 2019, 11, 167. [Google Scholar] [CrossRef] [Green Version]
- Gaitani, N.; Burud, I.; Thiis, T.; Santamouris, M. High-resolution spectral mapping of urban thermal properties with Unmanned Aerial Vehicles. Build. Environ. 2017, 121, 215–224. [Google Scholar] [CrossRef]
- Naughton, J.; McDonald, W. Evaluating the Variability of Urban Land Surface Temperatures Using Drone Observations. Remote Sens. 2019, 11, 1722. [Google Scholar] [CrossRef] [Green Version]
- Bayomi, N.; Nagpal, S.; Rakha, T.; Fernandez, J.E. Building envelope modeling calibration using aerial thermography. Energy Build. 2021, 233, 110648. [Google Scholar] [CrossRef]
- Park, S.-I.; Ryu, T.-H.; Choi, I.-C.; Um, J.-S. Evaluating the Operational Potential of LRV Signatures Derived from UAV Imagery in Performance Evaluation of Cool Roofs. Energies 2019, 12, 2787. [Google Scholar] [CrossRef] [Green Version]
- Hill, A.C.; Laugier, E.J.; Casana, J. Archaeological Remote Sensing Using Multi-Temporal, Drone-Acquired Thermal and Near Infrared (NIR) Imagery: A Case Study at the Enfield Shaker Village, New Hampshire. Remote Sens. 2020, 12, 690. [Google Scholar] [CrossRef] [Green Version]
- DiNapoli, R.J.; Lipo, C.P.; de Smet, T.S.; Hunt, T.L. Thermal Imaging Shows Submarine Groundwater Discharge Plumes Associated with Ancient Settlements on Rapa Nui (Easter Island, Chile). Remote Sens. 2021, 13, 2531. [Google Scholar] [CrossRef]
- Adamopoulos, E.; Rinaudo, F. UAS-Based Archaeological Remote Sensing: Review, Meta-Analysis and State-of-the-Art. Drones 2020, 4, 46. [Google Scholar] [CrossRef]
- Turner, R.M.; MacLaughlin, M.M.; Iverson, S.R. Identifying and mapping potentially adverse discontinuitie in underground excavations using thermal and multispectral UAV imagery. Eng. Geol. 2020, 266, 105470. [Google Scholar] [CrossRef]
- He, X.; Yang, X.; Luo, Z.; Guan, T. Application of unmanned aerial vehicle (UAV) thermal infrared remote sensing to identify coal fires in the Huojitu coal mine in Shenmu city, China. Sci. Rep. 2020, 10, 13895. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Sun, B.; Liu, S.; Zhang, C.; He, X.; Xu, D.; Tang, W. Identification of mining induced ground fissures using UAV and infrared thermal imager: Temperature variation and fissure evolution. ISPRS J. Photogramm. Remote Sens. 2021, 180, 45–64. [Google Scholar] [CrossRef]
- Zheng, H.; Zhong, X.; Yan, J.; Zhao, L.; Wang, X. A Thermal Performance Detection Method for Building Envelope Based on 3D Model Generated by UAV Thermal Imagery. Energies 2020, 13, 6677. [Google Scholar] [CrossRef]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Leggiero, M.; Andrew, B.; Elliott, R.; Indergaard, J.; Sharma, J.B.; Vogel, T. Radiative heat loss estimation of building envelopes based on 3D thermographic models utilizing small unmanned aerial systems (sUAS). Energy Build. 2021, 244, 110957. [Google Scholar] [CrossRef]
- Deane, S.; Avdelidis, N.P.; Ibarra-Castanedo, C.; Zhang, H.; Nezhad, H.Y.; Williamson, A.A.; Mackley, T.; Maldague, X.; Tsourdos, A.; Nooralishahi, P. Comparison of Cooled and Uncooled IR Sensors by Means of Signal-to-Noise Ratio for NDT Diagnostics of Aerospace Grade Composites. Sensors 2020, 20, 3381. [Google Scholar] [CrossRef]
- Crastes, A., Sr.; Ruiter, M.; Gierkink, S., Sr.; Brunelle, J., Sr. Recent uncooled IR development based on state of the art digital ROIC. Infrared Sensors, Devices, and Applications XI. Int. Soc. Opt. Photonics 2021, 8, 118310H. [Google Scholar] [CrossRef]
- Tankut, F.; Cologlu, M.H.; Askar, H.; Ozturk, H.; Dumanli, H.K.; Oruc, F.; Tilkioglu, B.; Ugur, B.; Akar, O.S.; Tepegoz, M.; et al. An 80 × 80 microbolometer type thermal imaging sensor using the LWIR-band CMOS infrared (CIR) technology. Infrared Technology and Applications XLIII. Int. Soc. Opt. Photonics 2017, 10177, 101771X. [Google Scholar] [CrossRef]
- Laurent, L.; Yon, J.-J.; Moulet, J.-S.; Roukes, M.; Duraffourg, L. 12-µm-Pitch Electromechanical Resonator for Thermal Sensing. Phys. Rev. Appl. 2018, 9, 024016. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, H.V. Modeling noise in thermal imaging systems. Infrared Imaging Systems: Design, Analysis, Modeling, and Testing IV. Int. Soc. Opt. Photonics 1993, 1969, 66–77. [Google Scholar] [CrossRef]
- Sharma, P.; Dell, J.; Parish, G.; Keating, A. Engineering 1/f noise in porous silicon thin films for thermal sensing applications. Microporous Mesoporous Mater. 2021, 324, 111302. [Google Scholar] [CrossRef]
- Yu, L.; Guo, Y.; Zhu, H.; Luo, M.; Han, P.; Ji, X. Low-Cost Microbolometer Type Infrared Detectors. Micromachines 2020, 11, 800. [Google Scholar] [CrossRef]
- Holst, G.C. Common Sense Approach to Thermal Imaging; SPIE Optical Engineering Press: Washington, DC, USA, 2000. [Google Scholar]
- Torres-Rua, A. Vicarious calibration of suas microbolometer temperature imagery for estimation of radiometric land surface temperature. Sensors 2017, 17, 1499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ribeiro-Gomes, K.; Hernández-López, D.; Ortega, J.F.; Ballesteros, R.; Poblete, T.; Moreno, M.A. Uncooled Thermal Camera Calibration and Optimization of the Photogrammetry Process for UAV Applications in Agriculture. Sensors 2017, 17, 2173. [Google Scholar] [CrossRef]
- Pestana, S.; Chickadel, C.C.; Harpold, A.; Kostadinov, T.S.; Pai, H.; Tyler, S.; Webster, C.; Lundquist, J.D. Bias correction of airborne thermal infrared observations over forests using melting snow. Water Resour. Res. 2019, 55, 11331–11343. [Google Scholar] [CrossRef]
- Aragon, B.; Johansen, K.; Parkes, S.; Malbeteau, Y.; Al-Mashharawi, S.; Al-Amoudi, T.; Andrade, C.F.; Turner, D.; Lucieer, A.; McCabe, M.F. A Calibration Procedure for Field and UAV-Based Uncooled Thermal Infrared Instruments. Sensors 2020, 20, 3316. [Google Scholar] [CrossRef] [PubMed]
- Drone Industry Insights. Top 10 Drone Manufacturers’ Market Shares in the US; Drone Industry Insights UG: Hamburg, Germany, 2019. [Google Scholar]
- DJI Science and Technology Co., Ltd. Mavic 2 Enterprise Advanced User Manual v 1.0. 03, Shenzhen, China. 2021. Available online: https://dl.djicdn.com/downloads/Mavic_2_Enterprise_Advanced/20210331/Mavic_2_Enterprise_Advanced_User_Manual_EN.pdf (accessed on 13 October 2021).
- DJI Science and Technology Co., Ltd. Matrice 600 Pro User Manual V1.0. Shenzhen, China. 2018. Available online: https://dl.djicdn.com/downloads/m600%20pro/1208EN/Matrice_600_Pro_User_Manual_v1.0_EN_1208.pdf (accessed on 13 October 2021).
- DJI Science and Technology Co., Ltd. Matrice 300 RTK User Manual V1.8. Shenzhen, China. 2021. Available online: https://dl.djicdn.com/downloads/matrice-300/20210419UM/M300_RTK_User_Manual_EN_v1.8_20210419.pdf (accessed on 13 October 2021).
- Kalacska, M.; Lucanus, O.; Arroyo-Mora, J.P.; Laliberté, É.; Elmer, K.; Leblanc, G.; Groves, A. Accuracy of 3D Landscape Reconstruction without Ground Control Points Using Different UAS Platforms. Drones 2020, 4, 13. [Google Scholar] [CrossRef] [Green Version]
- DJI Science and Technology Co., Ltd. Zenmuse XT2 Thermal by FLIR User Manual v1.0, 04, Shenzhen, China. 2018. Available online: https://dl.djicdn.com/downloads/Zenmuse%20XT%202/Zenmuse_XT_2_User_Manual_v1.0_en_.pdf (accessed on 13 October 2021).
- DJI Science and Technology Co., Ltd. Zenmuse XT Powered by FLIR User Manual v1.2, 05, Shenzhen, China. 2016. Available online: https://dl.djicdn.com/downloads/zenmuse_xt/en/Zenmuse_XT_User_Manual_V1.2_en_0708.pdf (accessed on 13 October 2021).
- Tiesinga, E.; Mohr, P.J.; Newell, D.B.; Taylor, B.N. CODATA recommended values of the fundamental physical constants: 2018. Rev. Mod. Phys. 2021, 93, 025010. [Google Scholar] [CrossRef]
- Minkina, W.; Dudzik, S. Infrared Thermography: Erros and Uncertainties; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Garcia-Santos, V.; Valor, E.; Caselles, V.; Mira, M.; Galve, J.M.; Coll, C. Evaluation of Different Methods to Retrieve the Hemispherical Downwelling Irradiance in the Thermal Infrared Region for Field Measurements. IEEE Trans. Geosci. Rem. Sens. 2013, 51, 4. [Google Scholar] [CrossRef]
- Fluke Corporation. Fluke Calibration 4180, 4181 Precision Infrared Calibrator. Operators Manual. November 2020. Available online: https://us.flukecal.com/products/process-calibration-tools/temperature-calibrators/infrared-calibrators/4180-4181-precision-?quicktabs_product_details=4 (accessed on 13 October 2021).
- da Cunha, A.R. Evaluation of measurement errors of temperature and relative humidity from HOBO data logger under different conditions of exposure to solar radiation. Envron. Monit. Assess. 2015, 187, 236. [Google Scholar] [CrossRef]
- Abdullahi, M.G.; Husini, E.M.; Ibrahim, A.O.; Collins, K.; Arabi, O.F.; Bashir, F.M. Architectural Experimental Field Measurement Process and Procedure using Case Study. Solid State Technol. 2021, 64, 2. [Google Scholar]
- Shawesh, R.; Mohamed, M. Post-occupancy evaluation of outdoor thermal comfort in hot arid zone. Int. J. Low Carb. Technol. 2020, 16, 1. [Google Scholar] [CrossRef]
- Lozano-Parra, J.; Pulido, M.; Lozano-Fondón, C.; Schnabel, S. How do Soil Moisture and Vegetation Covers Influence Soil Temperature in Drylands of Mediterranean Regions? Water 2018, 10, 1747. [Google Scholar] [CrossRef] [Green Version]
- Cengal, Y.A. Heat Transfer: A Practical Approach, 2nd ed.; McGraw–Hill: New York, NY, USA, 2002. [Google Scholar]
- Balaras, C.A.; Argiriou, A.A. Infrared thermography for building diagnostics. Energy Build. 2002, 34, 2. [Google Scholar] [CrossRef]
- Lehmann, B.; Wakili, K.G.; Frank, T.; Collado, B.V.; Tanner, C. Effects of individual climatic parameters on the infrared thermography of buildings. Appl. Energy 2013, 110, 29–43. [Google Scholar] [CrossRef]
- Jonsson, B.; Zinko, H. Quantitative Heat Loss Analysis of Heat- and Coolant Distribution Pipes by Means of Thermography; NOVEM: Vorbach, Germany, 1993; ISBN 90-72130-95-2. [Google Scholar]
- FluxTeq LLC. PHFS-01e Heat Flux Sensor Datasheet. Available online: https://d7c61e62-ec2b-486f-b3c3-d005ddd2f7d8.filesusr.com/ugd/b0a63e_e2f8d1846d244ead8946fe3d870ce7e2.pdf (accessed on 13 October 2021).
- Davies, J.A.; Idso, S.B. Estimating the Surface Radiation Balance and Its Components. Modification of the Aerial Environment of Plants. ASAE Monograph; American Society of Agricultural: St. Joseph, MI, USA, 1979; pp. 183–210. [Google Scholar]
- Tu, L.; Qin, Z.; Yang, L.; Wang, F.; Geng, J.; Zhao, S. Identifying the Lambertian Property of Ground Surfaces in the Thermal Infrared Region via Field Experiments. Remote Sens. 2017, 9, 481. [Google Scholar] [CrossRef] [Green Version]
- Humes, K.S.; Kustas, W.P.; Moran, M.S.; Nichols, W.D.; Weltz, M.A. Variability of emissivity and surface temperature over a sparsely vegetated surface. Water Resour. Res. 1994, 30, 1299–1310. [Google Scholar] [CrossRef]
- Kotthaus, S.; Smith, T.E.L.; Wooster, M.J.; Grimmond, C.S.B. Derivation of an urban materials spectral library through emittance and reflectance spectroscopy. ISPRS J. Photogramm. Remote Sens. 2014, 94, 194–212. [Google Scholar] [CrossRef] [Green Version]
- Sagan, V.; Maimaitijiang, M.; Sidike, P.; Eblimit, K.; Peterson, K.T.; Hartling, S.; Esposito, F.; Khanal, K.; Newcomb, M.; Pauli, D.; et al. UAV-Based High Resolution Thermal Imaging for Vegetation Monitoring, and Plant Phenotyping Using ICI 8640 P, FLIR Vue Pro R 640, and thermoMap Cameras. Remote Sens. 2019, 11, 330. [Google Scholar] [CrossRef] [Green Version]
- Hackl, H.; Baresel, J.P.; Mistele, B.; Hu, Y.; Schmidhalter, U. A Comparison of Plant Temperatures as Measured by Thermal Imaging and Infrared Thermometry. J. Agron. Crop Sci. 2012, 198, 415–429. [Google Scholar] [CrossRef] [Green Version]
- Brevik, E.C.; Fenton, T.E.; Horton, R. Effect of Daily Soil Temperature Fluctuations on Soil Electrical Conductivity as Measured with the Geonics® EM-38. Precis. Agric. 2004, 5, 145–152. [Google Scholar] [CrossRef]
- Singh, R.K.; Sharma, R.V. Numerical analysis for ground temperature variation. Geotherm. Energy 2017, 5, 22. [Google Scholar] [CrossRef] [Green Version]
- Patrucco, G.; Cortese, G.; Tonolo, F.G.; Spanò, A. Thermal and optical data fusion supporting built heritage analyses. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 619–626. [Google Scholar] [CrossRef]
- Kuczyńska, A.; Jarnuszewski, G.; Nowakowska, M.; Wexler, S.K.; Wiśniowski, Z.; Burczyk, P.; Durkowski, T.; Woźnicka, M. Identifying causes of poor water quality in a Polish agricultural catchment for designing effective and targeted mitigation measures. Sci. Total Environ. 2021, 765, 144125. [Google Scholar] [CrossRef]
















| RPAS | Take-Off Weight (kg) | Max. Take-Off Weight (Kg) | Max. Flight Time (min.) | Dimensions L × W × H (mm) | ~Cost (USD) | Year of Launch |
|---|---|---|---|---|---|---|
| M2EA | 0.909 * | 1.10 | 31 | 322 × 242 × 125 | 7200 | 2021 |
| M600P ** | 9.5 | 21.0 | 38 | 1668 × 1518 × 727 | 9200 | 2016 |
| M300 | 6.3 | 9.0 | 55 | 810 × 670 × 430 | 12,000 | 2020 |
| Camera | Weight (g) | Range (μm) | Resolution (pixels) | FOV (°) | Pixel Pitch (µm) | Visual Camera | ~Cost (USD) | Year of Launch |
|---|---|---|---|---|---|---|---|---|
| M2EA | 639 | 8–14 | 640 × 512 | 46.2 | 12 | Y | Incl. | 2021 |
| XT-R | 270 | 7.5–13.5 | 640 × 512 | 45° × 37° | 17 | N | 12,000 | 2016 |
| XT2 | 588 | 7.5–13.5 | 640 × 512 | 45° × 37° | 17 | Y | 12,000 | 2018 |
| Camera | Dist. (m) | Best Fit Equation | R2 | RMSE (°C) | 95% CI Slope | Bias (°C) | Mean Diff. (°C) | SD (°C) |
|---|---|---|---|---|---|---|---|---|
| M2EA | 2 | 1.117X − 3.451 | 0.9998 | 0.18 | 1.104X − 1.131 | −0.81 | 0.29 | 0.11 |
| M2EA | 4 | 1.041X − 1.723 | 0.9993 | 0.36 | 1.014X − 1.068 | −0.80 | 0.18 | 0.13 |
| XT-R | 2 | 1.018X − 1.415 | 0.9952 | 0.94 | 0.947X − 1.089 | −1.00 | 0.26 | 0.09 |
| XT-R | 4 | 0.984X − 0.788 | 0.9926 | 1.12 | 0.899X − 1.069 | −1.15 | 0.29 | 0.08 |
| XT2 | 2 | 1.023X − 0.736 | 0.9978 | 0.63 | 0.975X − 1.071 | −0.21 | 0.13 | 0.09 |
| XT2 | 4 | 1.024X − 0.775 | 0.9992 | 0.39 | 0.995X − 1.054 | −0.23 | 0.08 | 0.10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leblanc, G.; Kalacska, M.; Arroyo-Mora, J.P.; Lucanus, O.; Todd, A. A Practical Validation of Uncooled Thermal Imagers for Small RPAS. Drones 2021, 5, 132. https://doi.org/10.3390/drones5040132
Leblanc G, Kalacska M, Arroyo-Mora JP, Lucanus O, Todd A. A Practical Validation of Uncooled Thermal Imagers for Small RPAS. Drones. 2021; 5(4):132. https://doi.org/10.3390/drones5040132
Chicago/Turabian StyleLeblanc, George, Margaret Kalacska, J. Pablo Arroyo-Mora, Oliver Lucanus, and Andrew Todd. 2021. "A Practical Validation of Uncooled Thermal Imagers for Small RPAS" Drones 5, no. 4: 132. https://doi.org/10.3390/drones5040132
APA StyleLeblanc, G., Kalacska, M., Arroyo-Mora, J. P., Lucanus, O., & Todd, A. (2021). A Practical Validation of Uncooled Thermal Imagers for Small RPAS. Drones, 5(4), 132. https://doi.org/10.3390/drones5040132