
Deriving First Floor Elevations within Residential Communities Located in Galveston Using UAS Based Data


Abstract
:1. Introduction
1.1. Motivation and Data Gaps
1.2. UAS Technology for PaRS and 3D Modeling
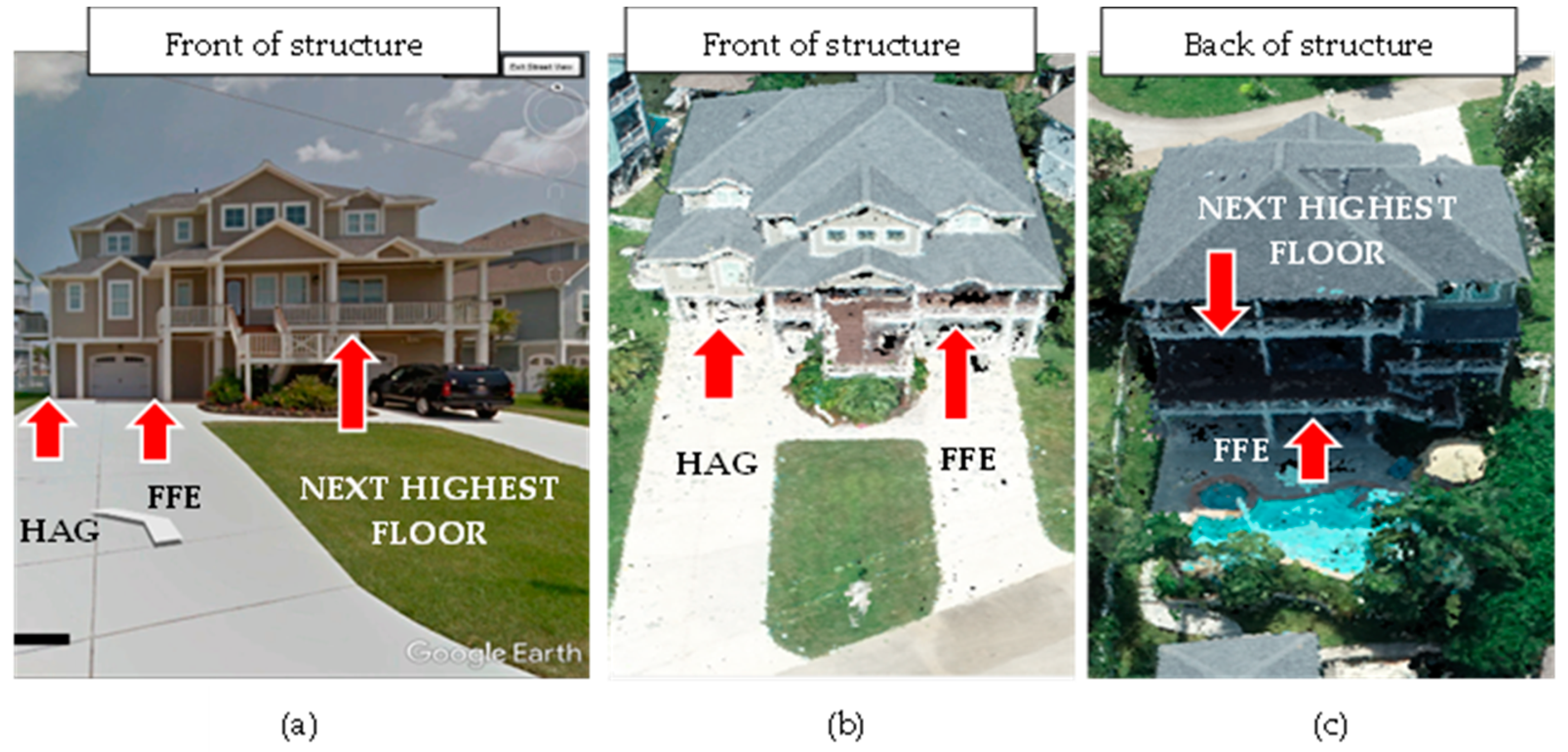
1.3. First Floor Elevations (FFEs) and FEMA-NFIP Guidelines
1.4. Research Questions
2. Data Acquisition and Methods
2.1. EC and UAS Data
2.2. Site Selection
2.3. UAS Flight Parameter Testing and Data Collection
2.4. Data Calibration and Processing
2.5. Comparative Analysis
3. Results
Comparative Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Barnes, K.B.; Morgan, J.; Roberge, M. Impervious Surfaces and the Quality of Natural and Built Environments; Department of Geography and Environmental Planning, Towson University: Baltimore, MD, USA, 2001. [Google Scholar]
- Nicholls, R.J.; Lowe, J.A. Benefits of mitigation of climate change for coastal areas. Glob. Environ. Chang. 2004, 14, 229–244. [Google Scholar] [CrossRef]
- Gargiulo, C.; Battarra, R.; Tremiterra, M.R. Coastal areas and climate change: A decision support tool for implementing adaptation measures. Land Use Policy 2020, 91, 104413. [Google Scholar] [CrossRef]
- Gersonius, B.; Ashley, R.; Pathirana, A.; Zevenbergen, C. Climate change uncertainty: Building flexibility into water and flood risk infrastructure. Clim. Chang. 2013, 116, 411–423. [Google Scholar] [CrossRef]
- Knight, D.B.; Davis, R.E. Contribution of tropical cyclones to extreme rainfall events in the southeastern United States. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef] [Green Version]
- Colomina, I.; de la Tecnologia, P.M. Towards a new paradigm for high-resolution low-cost photogrammetryand remote sensing. In Proceedings of the ISPRS XXI Congress, Beijing, China, 3–11 July 2008; pp. 1201–1206. [Google Scholar]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- George, C.; Hildebrand, A.; Claussen, J.; Cosyn, P.; Morris, S. Pilotless aerial vehicle systems: Size, scale and functions. Coordinates 2013, 9, 8–16. [Google Scholar] [CrossRef]
- Petrie, G. Commercial Operation of Lightweight. GEOInformatics 2013, 16, 28. [Google Scholar]
- Eisenbeiß, H. UAV Photogrammetry; ETH Zurich: Zürich, Switzerland, 2009; Available online: https://www.research-collection.ethz.ch/handle/20.500.11850/20976 (accessed on 16 February 2022).
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Grenzdörffer, G.; Niemeyer, F.; Frank, A. Symbiosis of UAS photogrammetry and TLS for surveying and 3D modeling of cultural heritage monuments-a case study about the cathedral of St. Nicholas in the city of Greifswald. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 91. [Google Scholar] [CrossRef] [Green Version]
- Peppa, M.; Hall, J.; Goodyear, J.; Mills, J. Photogrammetric assessment and comparison of DJI Phantom 4 Pro and Phantom 4 RTK small unmanned aircraft systems. In Proceedings of the ISPRS Geospatial Week 2019, Enschede, The Netherlands, 10–14 June 2019. [Google Scholar]
- Ritt, B.M. UAS Based Photogrammetry: A New Tool for Monitoring Beach Nourishment Projects: A Galveston, TX Test Case. 2018. Available online: https://oaktrust.library.tamu.edu/handle/1969.1/174580 (accessed on 4 April 2019).
- Tamminga, A.; Hugenholtz, C.; Eaton, B.; Lapointe, M. Hyperspatial remote sensing of channel reach morphology and hydraulic fish habitat using an unmanned aerial vehicle (UAV): A first assessment in the context of river research and management. River Res. Appl. 2015, 31, 379–391. [Google Scholar] [CrossRef]
- Uysal, M.; Toprak, A.S.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- Coveney, S.; Roberts, K. Lightweight UAV digital elevation models and orthoimagery for environmental applications: Data accuracy evaluation and potential for river flood risk modelling. Int. J. Remote Sens. 2017, 38, 3159–3180. [Google Scholar] [CrossRef] [Green Version]
- Şerban, G.; Rus, I.; Vele, D.; Breţcan, P.; Alexe, M.; Petrea, D. Flood-prone area delimitation using UAV technology, in the areas hard-to-reach for classic aircrafts: Case study in the north-east of Apuseni Mountains, Transylvania. Nat. Hazards 2016, 82, 1817–1832. [Google Scholar] [CrossRef]
- Udin, W.; Ahmad, A. Assessment of photogrammetric mapping accuracy based on variation flying altitude using unmanned aerial vehicle. IOP Conf. Ser. Earth Environ. Sci. 2014, 18, 012027. [Google Scholar] [CrossRef]
- Irschara, A.; Kaufmann, V.; Klopschitz, M.; Bischof, H.; Leberl, F. Towards fully automatic photogrammetric reconstruction using digital images taken from UAVs. 2010. Available online: https://www.isprs.org/proceedings/xxxviii/part7/a/pdf/65_xxxviii-part7a.pdf (accessed on 9 February 2019).
- Wang, J.; Li, C. Acquisition of UAV images and the application in 3D city modeling. In Proceedings of the International Symposium on Photoelectronic Detection and Imaging 2007: Image Processing, Beijing, China, 9–12 September 2017; pp. 280–290. [Google Scholar]
- Varbla, S.; Ellmann, A.; Puust, R. Centimetre-range deformations of built environment revealed by drone-based photogrammetry. Autom. Constr. 2021, 128, 103787. [Google Scholar] [CrossRef]
- FEMA. Insurance Agents’ Lowest Floor Guide. Available online: https://www.fema.gov/sites/default/files/2020-05/F-441_LowestFloorGuide_Dec_2017_ReDo_r3_0.pdf (accessed on 20 June 2019).
- FEMA. Base Flood Elevation (BFE). Available online: https://www.fema.gov/node/404233 (accessed on 20 June 2019).
- FEMA. Flood Zones. Available online: https://www.fema.gov/flood-zones (accessed on 20 June 2019).
- Lyu, H.-M.; Sun, W.-J.; Shen, S.-L.; Arulrajah, A. Flood risk assessment in metro systems of mega-cities using a GIS-based modeling approach. Sci. Total Environ. 2018, 626, 1012–1025. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Z.; Tang, Z.; Zeng, G. A GIS-based spatial multi-criteria approach for flood risk assessment in the Dongting Lake Region, Hunan, Central China. Water Resour. Manag. 2011, 25, 3465–3484. [Google Scholar] [CrossRef]
- Zerger, A.; Wealands, S. Beyond modelling: Linking models with GIS for flood risk management. Nat. Hazards 2004, 33, 191–208. [Google Scholar] [CrossRef]
- Bui, D.T.; Pradhan, B.; Nampak, H.; Bui, Q.-T.; Tran, Q.-A.; Nguyen, Q.-P. Hybrid artificial intelligence approach based on neural fuzzy inference model and metaheuristic optimization for flood susceptibilitgy modeling in a high-frequency tropical cyclone area using GIS. J. Hydrol. 2016, 540, 317–330. [Google Scholar] [CrossRef]
- Feizizadeh, B.; Gheshlaghi, H.A.; Bui, D.T. An integrated approach of GIS and hybrid intelligence techniques applied for flood risk modeling. J. Environ. Plan. Manag. 2021, 64, 485–516. [Google Scholar] [CrossRef]
- Wang, Y.; Hong, H.; Chen, W.; Li, S.; Pamučar, D.; Gigović, L.; Drobnjak, S.; Tien Bui, D.; Duan, H. A hybrid GIS multi-criteria decision-making method for flood susceptibility mapping at Shangyou, China. Remote Sens. 2019, 11, 62. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Li, W.; Zhang, C.; Hanink, D.M.; Li, X.; Wang, W. Parcel-based urban land use classification in megacity using airborne LiDAR, high resolution orthoimagery, and Google Street View. Comput. Environ. Urban Syst. 2017, 64, 215–228. [Google Scholar] [CrossRef] [Green Version]
- Donat, M.G.; Lowry, A.L.; Alexander, L.V.; O’Gorman, P.A.; Maher, N. More extreme precipitation in the world’s dry and wet regions. Nat. Clim. Chang. 2016, 6, 508–513. [Google Scholar] [CrossRef]
- Pfahl, S.; O’Gorman, P.A.; Fischer, E.M. Understanding the regional pattern of projected future changes in extreme precipitation. Nat. Clim. Chang. 2017, 7, 423–427. [Google Scholar] [CrossRef]
- Roth, D. Texas Hurricane History; National Weather Service: Camp Springs, MD, USA, 2010; Volume 17.
- Du, J.; Park, K. Estuarine salinity recovery from an extreme precipitation event: Hurricane Harvey in Galveston Bay. Sci. Total Environ. 2019, 670, 1049–1059. [Google Scholar] [CrossRef]
- Du, J.; Park, K.; Dellapenna, T.M.; Clay, J.M. Dramatic hydrodynamic and sedimentary responses in Galveston Bay and adjacent inner shelf to Hurricane Harvey. Sci. Total Environ. 2019, 653, 554–564. [Google Scholar] [CrossRef]
- NOAA. Online Vertical Datum Transformation. Available online: https://vdatum.noaa.gov/vdatumweb/ (accessed on 2 July 2019).
- FAA. Small Unmanned Aircraft Systems (UAS) Regulations (Part 107). Available online: https://www.faa.gov/newsroom/small-unmanned-aircraft-systems-uas-regulations-part-107 (accessed on 17 October 2019).
- FAA. Certificated Remote Pilots including Commercial Operators. Available online: https://www.faa.gov/uas/commercial_operators/ (accessed on 26 October 2019).
- Title 5. Offense against the Person. In PENAL CODE; Texas State Law Library: Austin, TX, USA, 2001. Available online: https://statutes.capitol.texas.gov/Docs/PE/htm/PE.21.htm#21.15 (accessed on 16 February 2022).
- Chapter 423. Use of Unmanned Aircraft. In Texas Government Code; Texas State Law Library: Austin, TX, USA, 2013. Available online: https://guides.sll.texas.gov/recording-laws/drones (accessed on 16 February 2022).
- Galveston. What Are the Guidelines for Flying a Drone in Galveston? Available online: https://www.galvestontx.gov/Faq.aspx?QID=195 (accessed on 12 March 2019).
- Texas General Land Office. $179 Million Granted by Texas GLO for Historic Disaster Mitigation Projects in Galveston County. Available online: https://www.glo.texas.gov/the-glo/news/press-releases/2021/may/mitigation/179-million-granted-by-texas-glo-for-historic-disaster-mitigation-projects-in-galveston-county.html (accessed on 21 May 2021).
- USACE. Coastal Texas Study: Executive Summary. Available online: https://www.swg.usace.army.mil/Portals/26/docs/Planning/Public%20Notices-Civil%20Works/2020%20Coastal%20DIFR%20and%20dEIS/Coastal%20TX%20Executive%20Summary_20201019.pdf?ver=9fE_s4Hla4njYurhqiCYHQ%3D%3D (accessed on 15 October 2020).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Community | Foundation Types | Development Years |
|---|---|---|
| Lafitte’s Cove | Pier | 1996–Current |
| Campeche Cove | Slab, Raised | 1978–2004 |
| Evia | Slab, Raised, Pier | 2004–Current |
| Silk-Stocking District | Slab, Raised, Pier | 1890–1975 |
| Parameter | Description |
|---|---|
| Flight plan type | 3D photogrammetry flight plans including ‘double-grid ‘and ‘multi-oriented’ |
| Flight altitude | Altitude (m) at which the UAS captures aerial imagery |
| Flight plan area | area (length and width) of flight plan type |
| Flight plan margin | flight plan boundaries the UAS can or cannot exceed from flight plan area |
| Gimbal tilt | tilt of the gimbal positioning the camera capturing SfM imagery |
| Lateral and front overlap | 2D/Nadir (90-degree gimbal tilt) photo capture overlap percentage |
| Oblique lateral and front overlap | 3D (45–60-degree gimbal tilt) photo capture overlap percentage |
| Start and end points | Start and end locations of the flight plan relative to launch point |
| Residential Community | Flight Plan Type | Flight Plan Altitude (m) | Flight Plan Area | Flight Plan Margin | Gimbal Tilt (Degrees) | Oblique Overlap (%/%) | Start and End Points |
|---|---|---|---|---|---|---|---|
| Laffite’s Cove | Double Grid | 100 | 4 sections (~40–50 acres each) | AUTO | 60 | 70/75 | Closest to launch location. Center of full 4 sections. |
| Campeche Cove | Double Grid | 100 | 1 section (~61 acres) | 10 m | 60 | 70/80 | Closest to launch location. |
| Evia | Double Grid | 100 | 2 sections (~60 & 115 acres) | AUTO | 60 | 70/80 | Closest to launch locations center of each section |
| Silk-Stocking District | Double Grid | 45 | 4 sections (~10 acres each) | AUTO | 45 | * 80/80 | Closest to launch location. Center of 4 sections. |
| Residential Community | Average Image Count per Section | Total Image Count | Total Acres | Batteries Used | Flight Altitude | Gimbal Tilt |
|---|---|---|---|---|---|---|
| Laffite’s Cove | 391 (4 sections) | 1564 | 190 acres | 8 | 100 | 60 |
| Campeche Cove | 944 | 944 | 61 acres | 3 | 100 | 60 |
| Evia | 1158 (2 sections) | 2315 | 182 acres | 9 | 100 | 60 |
| Silk-Stocking District | 780 (4 sections) | 3119 | 40 acres | 8 | 45 | 45 |
| Top of Bottom Floor (FFE) | Top of Next Highest Floor | Lowest Service Grade (LSG) | Lowest Adjacent Grade (LAG) | Highest Adjacent Grade (HAG) | |
|---|---|---|---|---|---|
| MAE | 0.16 m | 0.31 m | 0.44 m | 0.50 m | 0.19 m |
| p-value | 0.832 | 0.034 | 0.768 | 0.000 | 0.143 |
| Community | Field Labor Time | Pix4D Processing Time | Data Derivation Time | Houses Captured |
|---|---|---|---|---|
| Laffite’s Cove | 6.5 h | 10 h | 23.3 h | 280 |
| Campeche Cove | 2.5 h | 3 h total | 24.4 h | 293 |
| Evia | 8 h | 8 h | 17 h | 205 |
| Silk-Stocking District | 5 h | 20 h | 14.5 h | 174 |
| Total | 22 h | 41 h | 79.2 h | 952 |
| Address | EC FFE 1 (m) | UAS FFE 2 (m) | Error (1−2) (m) | UAS HAG (m) |
|---|---|---|---|---|
| 13 Sunrise Row | 3.32 | 4.25 | 0.93 | 3.32 |
| 11 Sunrise Row | 4.21 | 4.28 | 0.07 | 3.36 |
| 9 Sunrise Row | 4.21 | 4.22 | 0.01 | 3.45 |
| Address | EC FFE (m) 1 | UAS FFE (m) 2 | Error (1−2) (m) | EC Next Highest Floor 3 | Error (2−3) (m) | UAS HAG 4 | Error (1−4) (m) |
|---|---|---|---|---|---|---|---|
| 3443 Eckert Drive | 1.64 | 5.97 | 4.33 | 5.96 | 0.01 | 1.55 | 0.09 |
| 3439 Eckert Drive | 1.8 | 6.05 | 4.25 | 6.13 | 0.08 | 1.6 | 0.2 |
| 3410 Eckert Drive | 2.22 | 5.88 | 3.66 | 6.00 | 0.12 | 2.07 | 0.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diaz, N.D.; Highfield, W.E.; Brody, S.D.; Fortenberry, B.R. Deriving First Floor Elevations within Residential Communities Located in Galveston Using UAS Based Data. Drones 2022, 6, 81. https://doi.org/10.3390/drones6040081
Diaz ND, Highfield WE, Brody SD, Fortenberry BR. Deriving First Floor Elevations within Residential Communities Located in Galveston Using UAS Based Data. Drones. 2022; 6(4):81. https://doi.org/10.3390/drones6040081
Chicago/Turabian StyleDiaz, Nicholas D., Wesley E. Highfield, Samuel D. Brody, and Brent R. Fortenberry. 2022. "Deriving First Floor Elevations within Residential Communities Located in Galveston Using UAS Based Data" Drones 6, no. 4: 81. https://doi.org/10.3390/drones6040081
APA StyleDiaz, N. D., Highfield, W. E., Brody, S. D., & Fortenberry, B. R. (2022). Deriving First Floor Elevations within Residential Communities Located in Galveston Using UAS Based Data. Drones, 6(4), 81. https://doi.org/10.3390/drones6040081