Author Contributions
Conceptualization, X.W. and J.-S.P.; Formal analysis, X.W., J.-S.P., Q.Y. and S.-C.C.; Methodology, X.W., J.-S.P., L.K., V.S. and S.-C.C.; Validation, J.-S.P., Q.Y., L.K. and V.S.; Writing—original draft, X.W.; Writing—review & editing, X.W., J.-S.P., Q.Y., L.K., V.S. and S.-C.C. All authors have read and agreed to the published version of the manuscript.
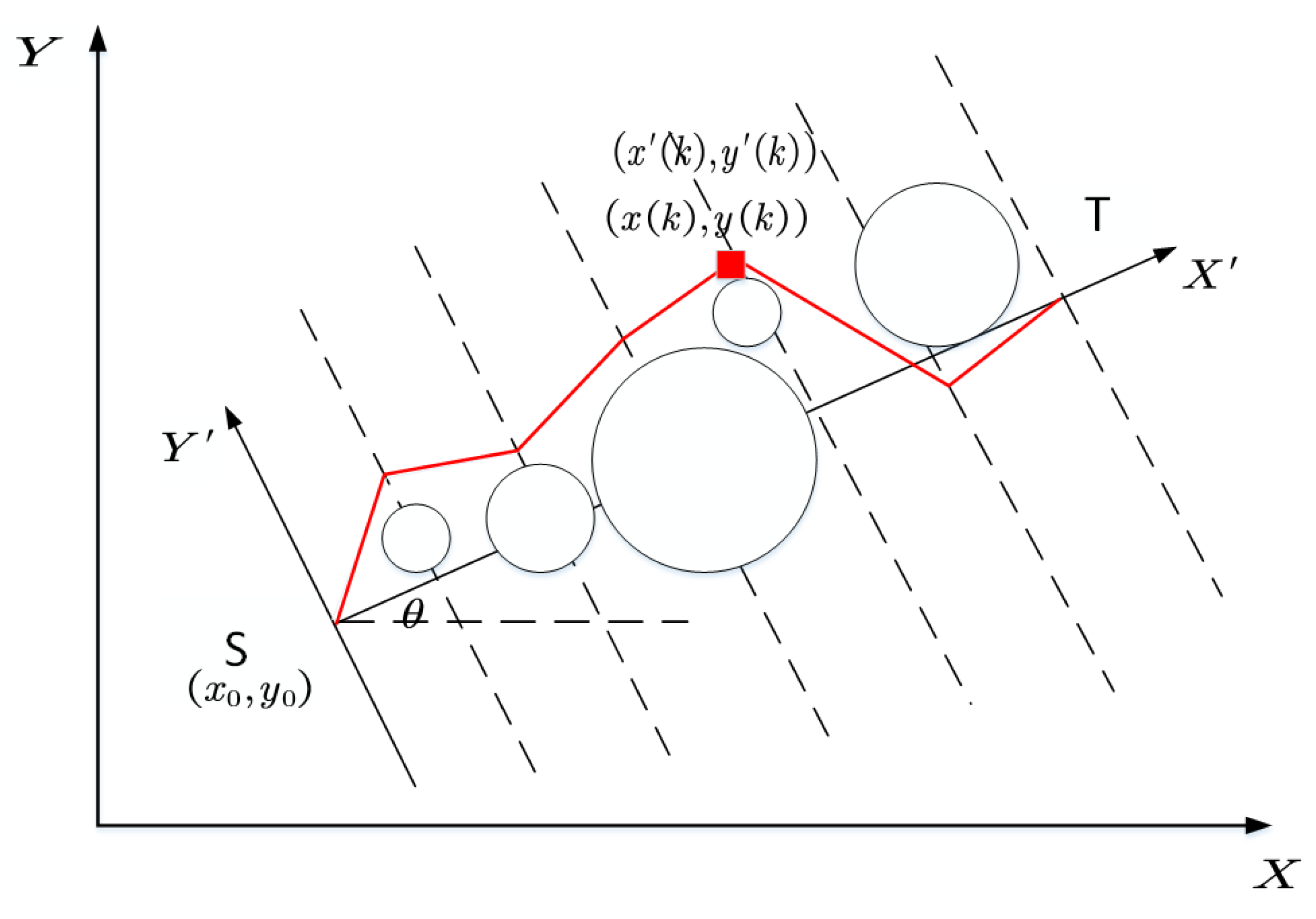
Figure 1.
Two-dimensional representation of planning space.
Figure 1.
Two-dimensional representation of planning space.
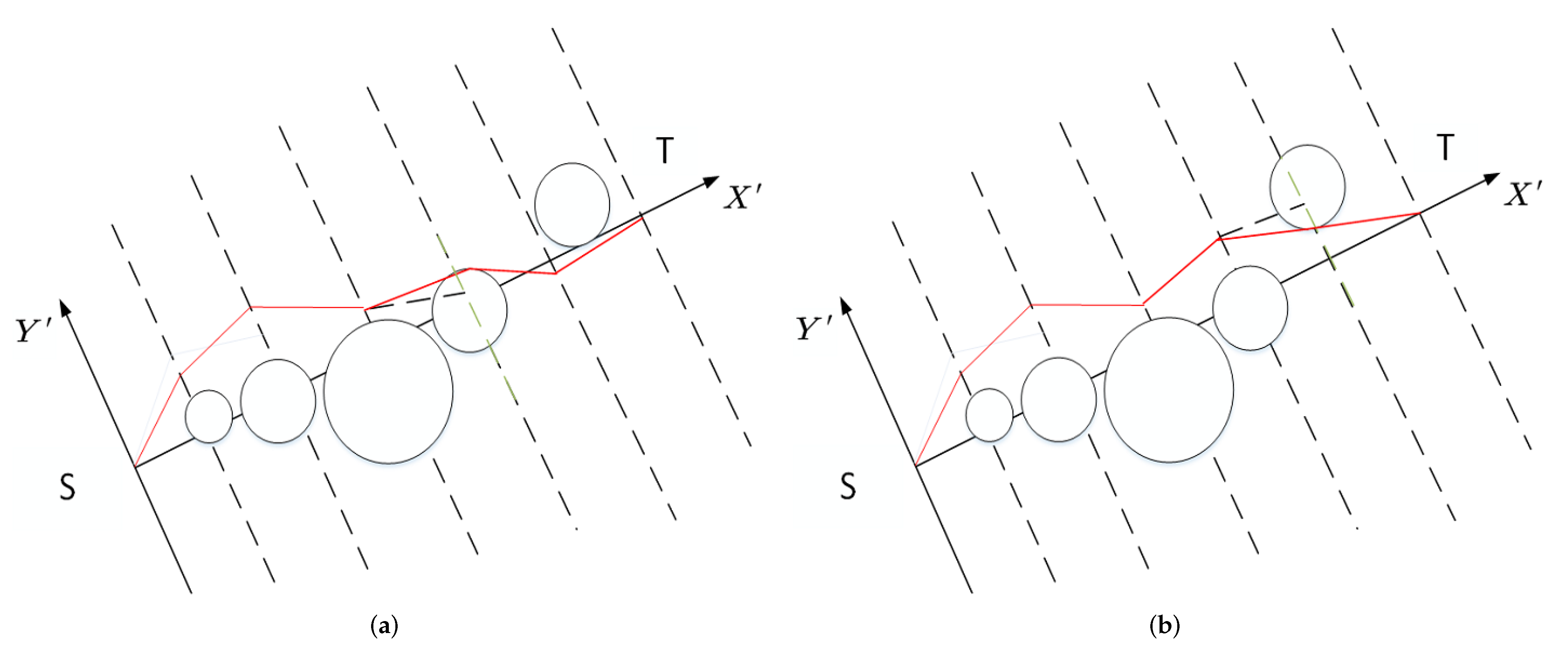
Figure 2.
The post-collision processing flow. (a) ; (b) .
Figure 2.
The post-collision processing flow. (a) ; (b) .
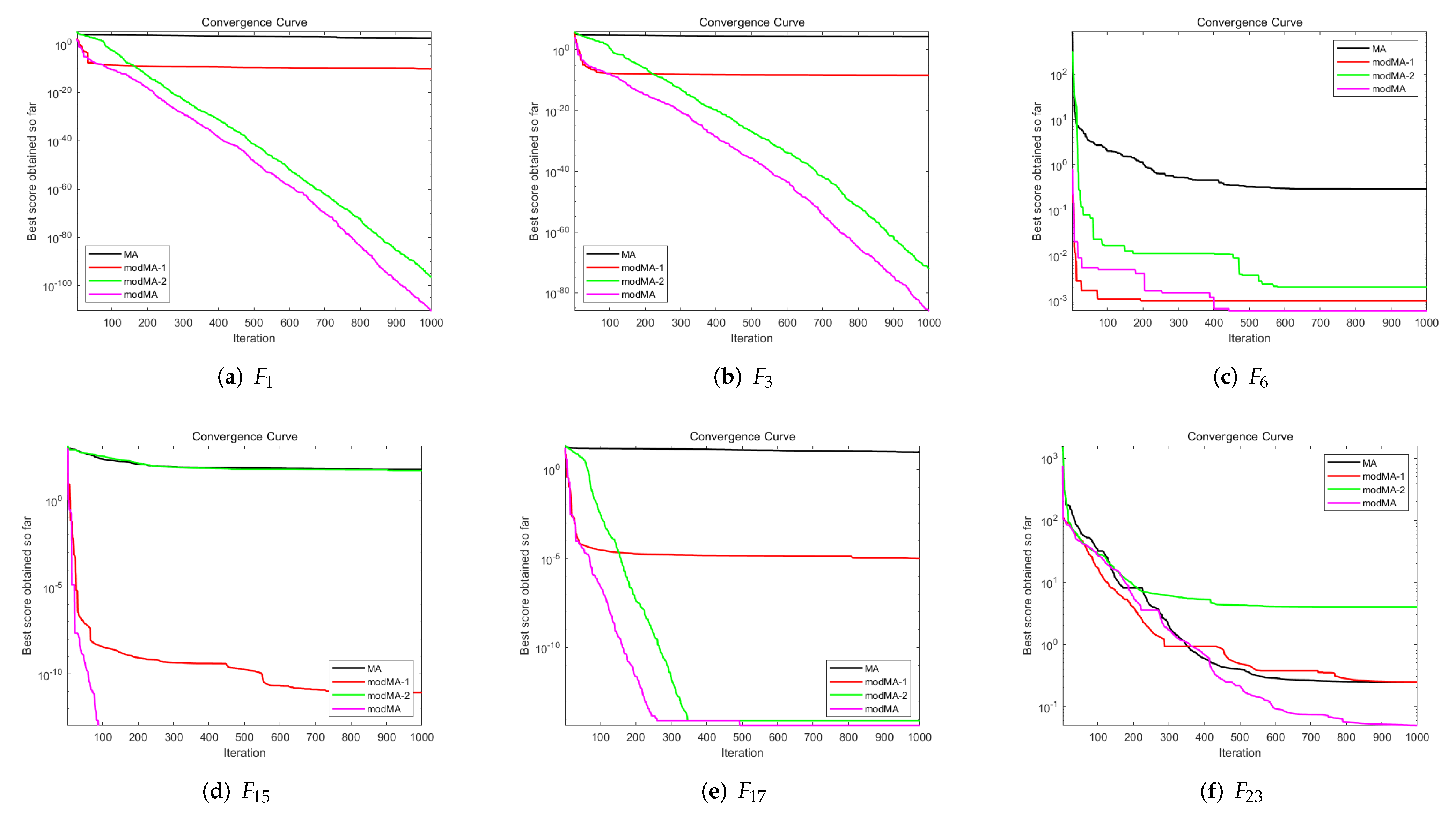
Figure 3.
Comparison of convergence curve between MA, modMA-1, modMA-2, and modMA with = 100.
Figure 3.
Comparison of convergence curve between MA, modMA-1, modMA-2, and modMA with = 100.
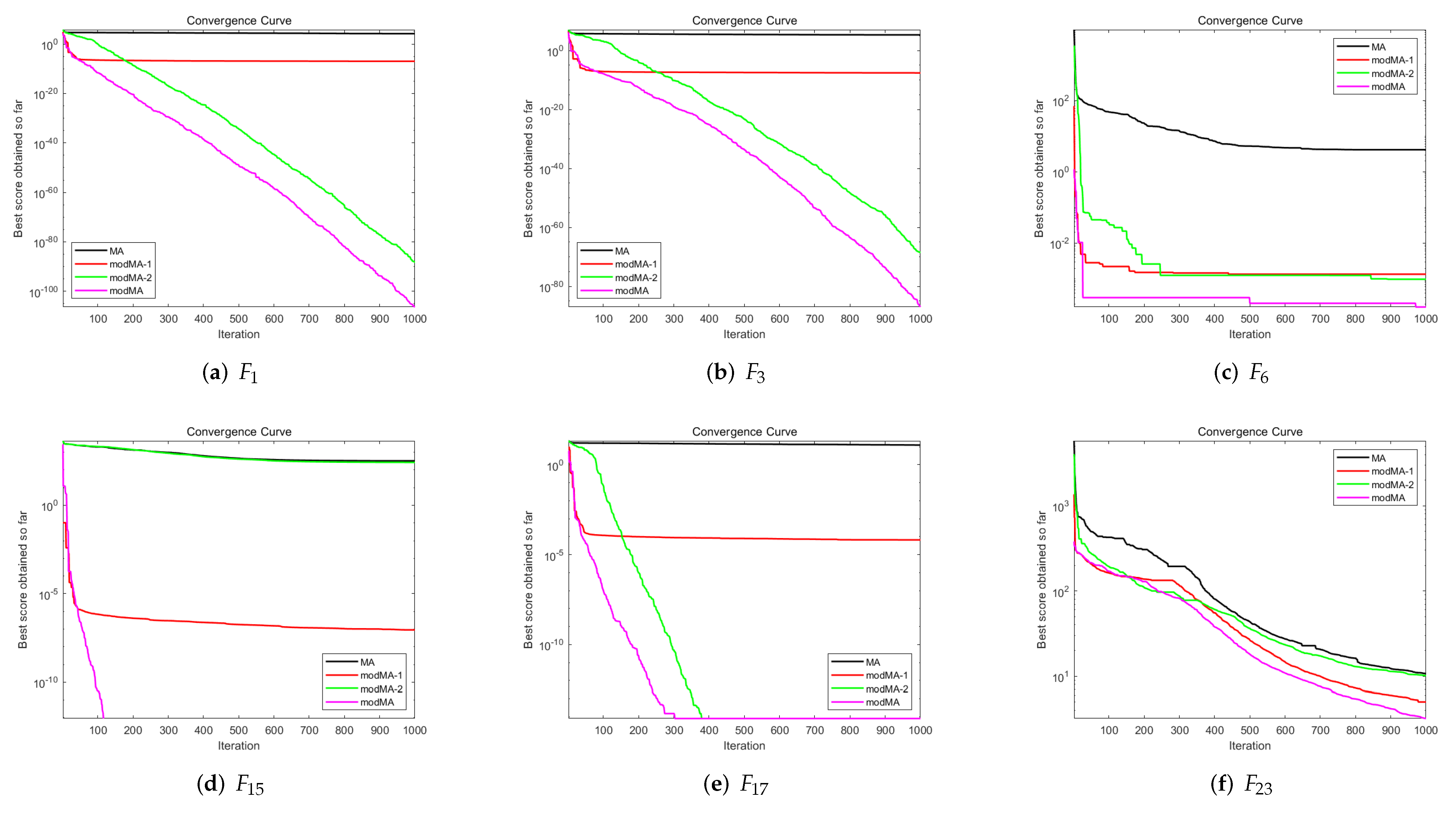
Figure 4.
Comparison of convergence curve between MA, modMA-1, modMA-2, and modMA with = 300.
Figure 4.
Comparison of convergence curve between MA, modMA-1, modMA-2, and modMA with = 300.
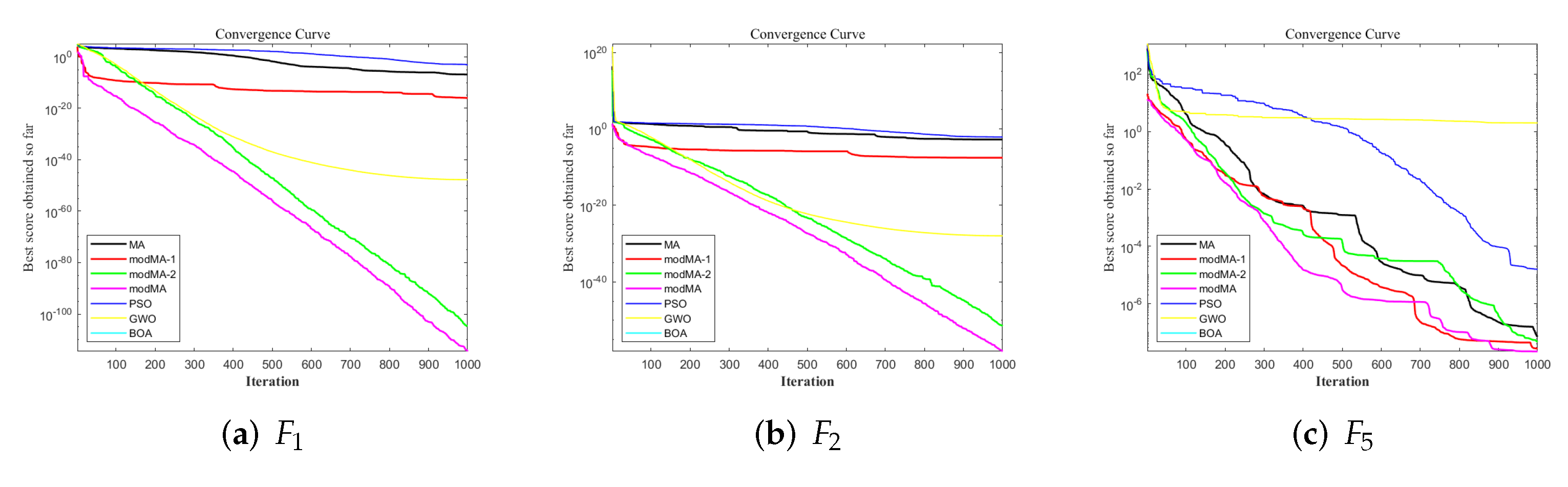
Figure 5.
Comparison of convergence curve of MA, modMA-1, modMA-2, modMA, PSO, GWO and BOA in benchmark functions , and when = 50.
Figure 5.
Comparison of convergence curve of MA, modMA-1, modMA-2, modMA, PSO, GWO and BOA in benchmark functions , and when = 50.
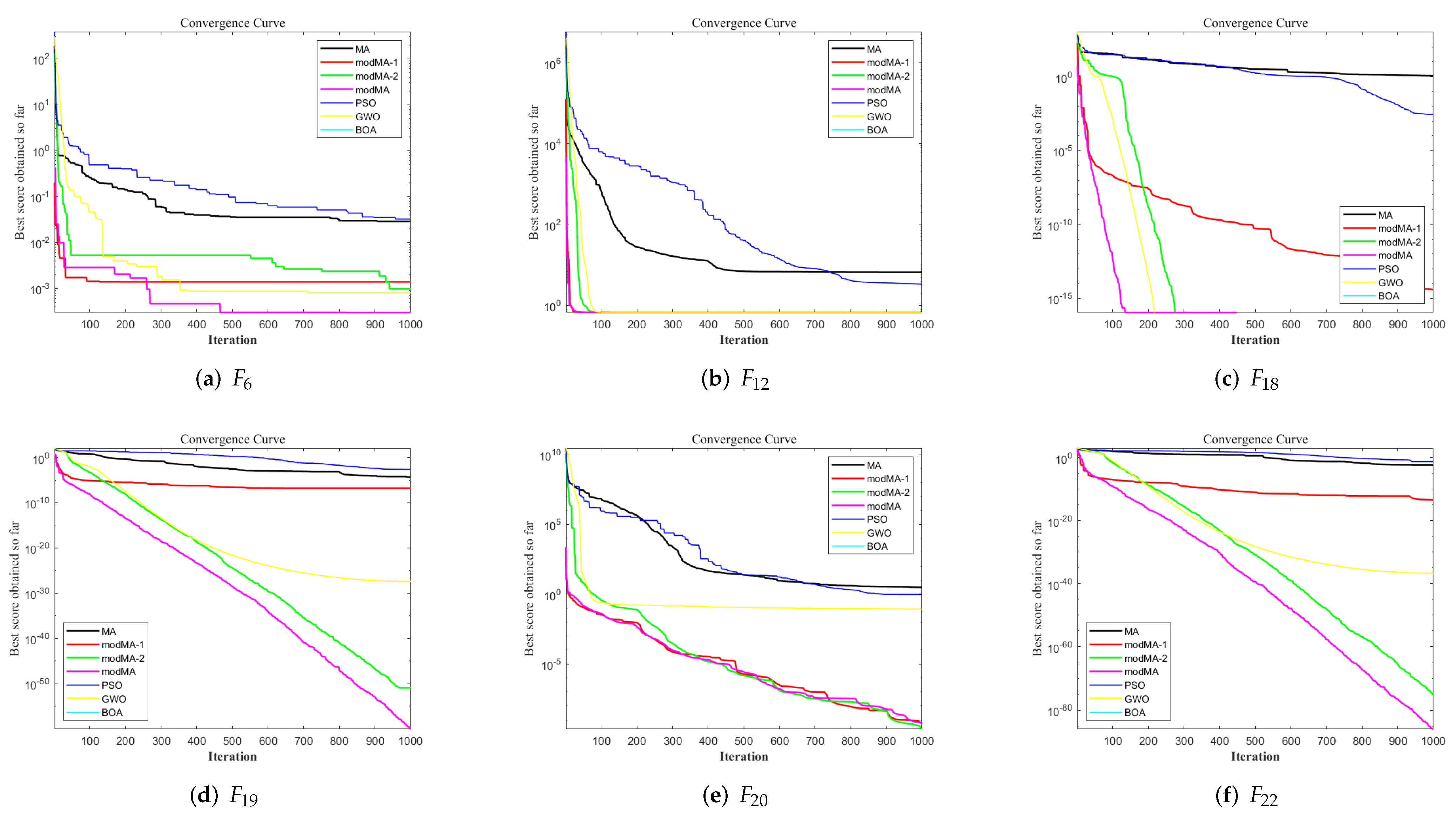
Figure 6.
Comparison of convergence curve between MA, modMA-1, modMA-2, modMA, PSO, GWO and BOA with in benchmark functions , , , , and Dim = 50.
Figure 6.
Comparison of convergence curve between MA, modMA-1, modMA-2, modMA, PSO, GWO and BOA with in benchmark functions , , , , and Dim = 50.
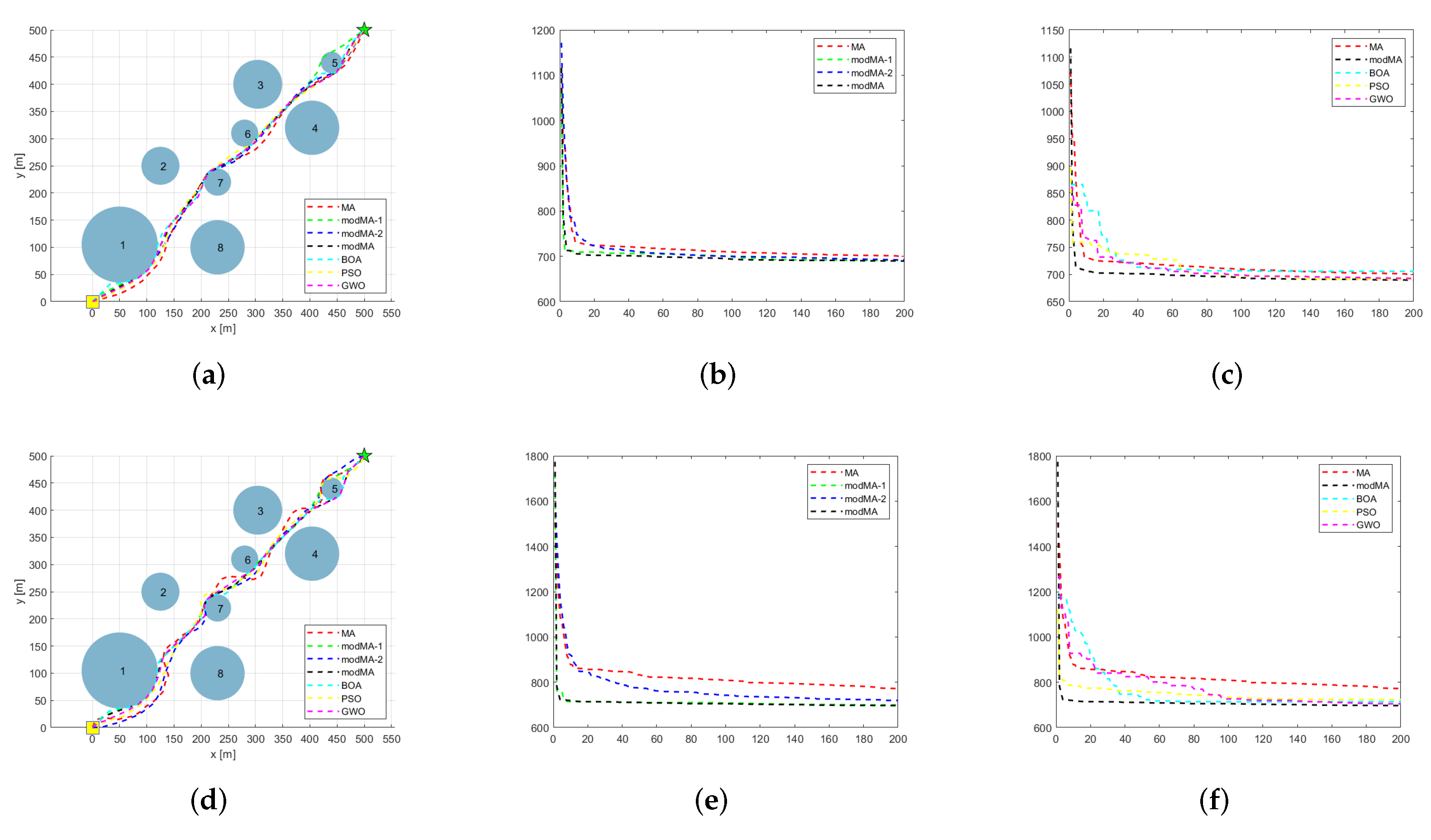
Figure 7.
Path diagram of a single run in Case 1. (a) Comparative path planning results in Case 1, = 30; (b) Evolution curves of four algorithms in Case 1, = 30; (c) Evolution curves of different algorithms in Case 1, = 30; (d) Comparative path planning results in Case 1, = 50; (e) Evolution curves of four algorithms in Case 1, = 50; (f) Evolution curves of different algorithms in Case 1, = 50.
Figure 7.
Path diagram of a single run in Case 1. (a) Comparative path planning results in Case 1, = 30; (b) Evolution curves of four algorithms in Case 1, = 30; (c) Evolution curves of different algorithms in Case 1, = 30; (d) Comparative path planning results in Case 1, = 50; (e) Evolution curves of four algorithms in Case 1, = 50; (f) Evolution curves of different algorithms in Case 1, = 50.
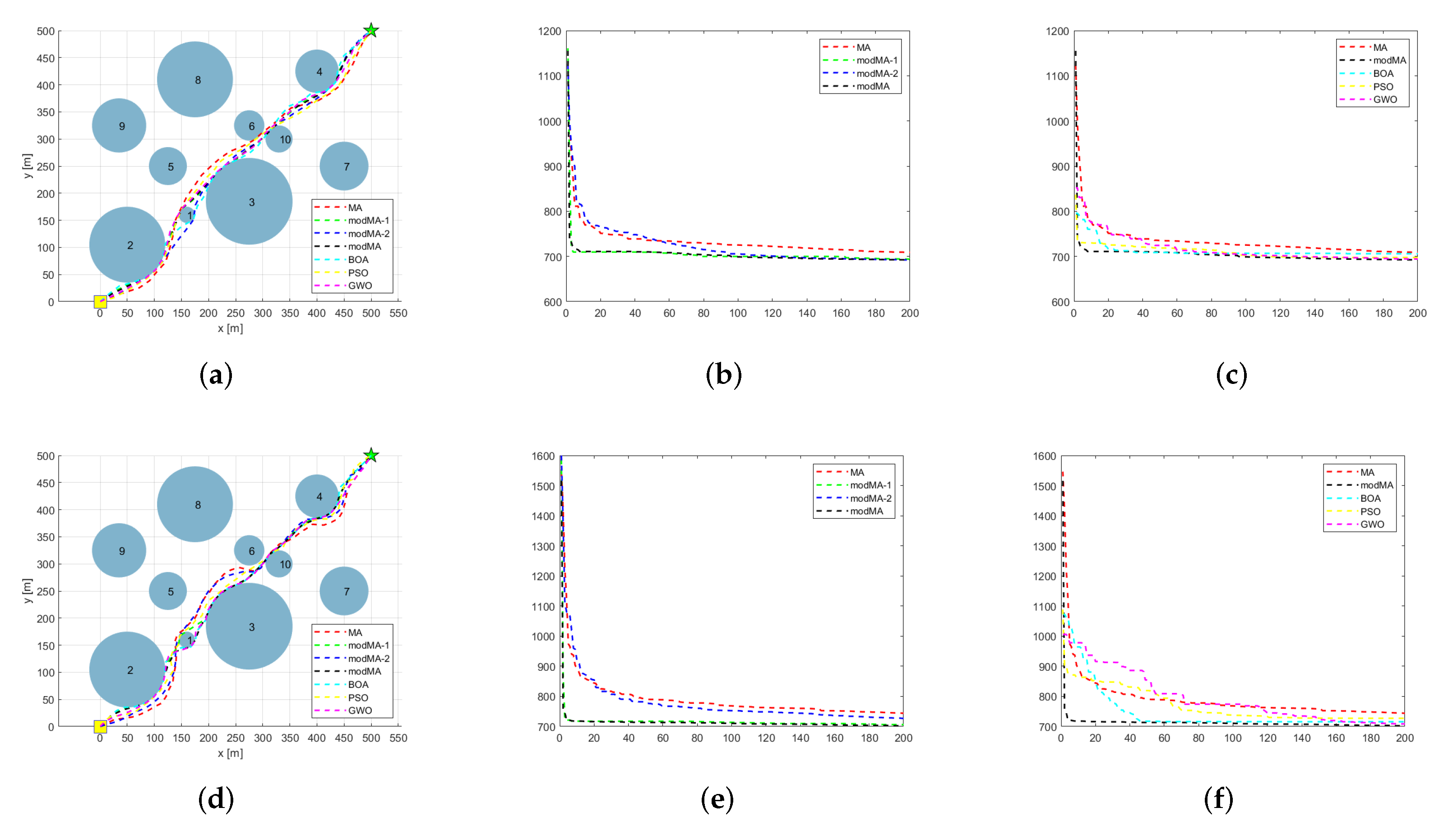
Figure 8.
Path diagram of a single run in Case 2. (a) Comparative path planning results in Case 2, = 30. (b) Evolution curves of four algorithms in Case 2, = 30. (c) Evolution curves of different algorithms in Case 2, = 30. (d) Comparative path planning results in Case 2, = 50. (e) Evolution curves of four algorithms in Case 2, = 50. (f) Evolution curves of different algorithms in Case 2, = 50.
Figure 8.
Path diagram of a single run in Case 2. (a) Comparative path planning results in Case 2, = 30. (b) Evolution curves of four algorithms in Case 2, = 30. (c) Evolution curves of different algorithms in Case 2, = 30. (d) Comparative path planning results in Case 2, = 50. (e) Evolution curves of four algorithms in Case 2, = 50. (f) Evolution curves of different algorithms in Case 2, = 50.
Table 1.
Parameter settings for the algorithms to be compared.
Table 1.
Parameter settings for the algorithms to be compared.
| No. | Name | Parameter |
|---|
| 1 | MA | = 0.9, = 0.2, = 1, = = 1.5, d = 5, = 2, = 1 |
| 2 | modMA-1 | = 0.9, = 0.2, = 1, = = 1.5, d = 5, = 2, = 1, = 0.15 |
| 3 | modMA-2 | = 0.9, = 0.2, = 1, = = 1.5, d = 5, = 2, = 1 |
| 4 | modMA | = 0.9, = 0.2, = 1, = = 1.5, d = 5, = 2, = 1, = 0.15 |
| 5 | PSO | = 0.9, = 0.2, = = 1.5 |
| 6 | GWO | = 2, = 0 |
| 7 | BOA | = 0.8, = 0.1, = 0.01 |
Table 2.
MA, modMA-1, modMA-2, and modMA test results on the 100-dimensional functions in experiment 1.
Table 2.
MA, modMA-1, modMA-2, and modMA test results on the 100-dimensional functions in experiment 1.
| Functions | MA | modMA-1 | modMA-2 | modMA |
|---|
| Best | 1.130 × | 4.798 × | 6.615 × | 1.443 × |
| Avg | 2.586 × | 5.163 × | 2.228 × | 5.000 × |
| Std | 1.033 × | 1.320 × | 5.748 × | 2.713 × |
| Best | 1.049 × | 2.301 × | 3.723 × | 3.236 × |
| Avg | 2.029 × | 1.035 × | 1.499 × | 1.783 × |
| Std | 5.771 × | 2.889 × | 8.154 × | 9.097 × |
| Best | 1.517 × | 1.586 × | 3.283 × | 6.919 × |
| Avg | 92.821 × | 1.920 × | 1.120 × | 8.239 × |
| Std | 6.322 × | 2.029 × | 5.825 × | 5.655 × |
| Best | 4.179 × | 2.274 × | 3.084 × | 0.000 × |
| Avg | 5.948 × | 5.983 × | 5.799 × | 0.000 × |
| Std | 9.749 × | 1.629 × | 1.473 × | 0.000 × |
| Best | 7.314 × | 8.795 × | 4.441 × | 4.441 × |
| Avg | 9.007 × | 1.006 × | 5.862 × | 5.862 × |
| Std | 9.048 × | 1.516 × | 1.770 × | 1.770 × |
| Best | 1.762 × | 1.652 × | 1.483 × | 1.366 × |
| Avg | 6.624 × | 4.767 × | 3.482 × | 2.002 × |
|
Std | 1.275 × | 6.518 × | 8.994 × | 3.296 × |
Table 3.
MA, modMA-1, modMA-2, and modMA test results on the 300-dimensional functions in experiment 1.
Table 3.
MA, modMA-1, modMA-2, and modMA test results on the 300-dimensional functions in experiment 1.
| Functions | MA | modMA-1 | modMA-2 | modMA |
|---|
| Best | 1.223 × | 4.977 × | 4.135 × | 1.469 × |
| Avg | 1.607 × | 1.547 × | 9.198 × | 4.037 × |
| Std | 1.865 × | 5.898 × | 3.814 × | 2.206 × |
| Best | 1.405 × | 1.363 × | 9.877 × | 1.422 × |
| Avg | 2.414 × | 1.168 × | 4.772 × | 2.737 × |
| Std | 8.673 × | 4.095 × | 2.340 × | 1.495 × |
| Best | 2.985 × | 1.681 × | 2.015 × | 6.201 × |
| Avg | 3.827 × | 2.248 × | 1.273 × | 8.106 × |
| Std | 5.001 × | 2.093 × | 6.273 × | 5.993 × |
| Best | 1.868 × | 6.366 × | 1.249 × | 0.000 × |
| Avg | 2.351 × | 2.824 × | 2.269 × | 0.000 × |
| Std | 2.567 × | 1.187 × | 4.775 × | 0.000 × |
| Best | 1.245 × | 9.821 × | 4.441 × | 4.441 × |
| Avg | 1.337 × | 7.345 × | 6.099 × | 6.099 × |
| Std | 4.853 × | 1.129 × | 1.741 × | 1.803 × |
| Best | 4.761 × | 2.691 × | 3.108 × | 2.294 × |
| Avg | 7.554 × | 4.673 × | 5.422 × | 3.979 × |
|
Std | 1.804 × | 1.061 × | 1.415 × | 8.642 × |
Table 4.
MA, modMA-1, modMA-2, modMA, PSO, GWO, and BOA test results on the 50-dimensional functions in experiment 2.
Table 4.
MA, modMA-1, modMA-2, modMA, PSO, GWO, and BOA test results on the 50-dimensional functions in experiment 2.
| Functions | MA | modMA-1 | modMA-2 | modMA | PSO | GWO | BOA |
|---|
| Mean | 4.778 × | 5.874 × | 2.055 × | 4.660 × | 3.555 × | 2.875 × | 1.761 × |
| Std | 1.533 × | 1.598 × | 1.119 × | 1.82 × | 9.273 × | 2.797 × | 7.850 × |
| Mean | 4.695 × | 7.326 × | 4.029 × | 4.294 × | 2.038 × | 1.406 × | 2.791 × |
| Std | 7.433 × | 1.632 × | 7.881 × | 1.834 × | 3.023 × | 1.342 × | 8.588 × |
| Mean | 1.978 × | 8.022 × | 3.506 × | 2.191 × | 2.306 × | 2.120 × | 1.773 × |
| Std | 8.416 × | 2.235 × | 1.920 × | 1.015 × | 7.139 × | 6.684 × | 1.050 × |
| Mean | 1.693 × | 6.127 × | 2.147 × | 3.468 × | 6.888 × | 1.802 × | 1.057 × |
| Std | 3.424 × | 1.037 × | 9.710 × | 1.900 × | 8.100 × | 2.251 × | 4.996 × |
| Mean | 4.184 × | 4.388 × | 4.502 × | 5.995 × | 4.134 × | 1.873 × | 1.031 × |
| Std | 1.871 × | 2.737 × | 3.135 × | 2.724 × | 1.382 × | 5.635 × | 7.762 × |
| Mean | 6.249 × | 1.826 × | 1.145 × | 6.490 × | 3.759 × | 1.010 × | 6.995 × |
| Std | 1.634 × | 1.533 × | 6.072 × | 5.269 × | 1.022 × | 3.972 × | 2.370 × |
| Mean | 2.67 × | 2.67 × | 2.67 × | 2.67 × | 0.000 × | 5.688 × | 4.816 × |
| Std | 9.62 × | 9.62 × | 9.62 × | 9.62 × | 0.000 × | 2.500 × | 2.567 × |
| Mean | 9.117 × | 8.800 × | 5.99 × | 1.345 × | 1.431 × | 2.35 × | 7.036 × |
| Std | 3.569 × | 4.504 × | 0.000 × | 0.000 × | 6.681 × | 0.000 × | 8.769 × |
| Mean | 1.857 × | 8.590 × | 9.788 × | 8.851 × | 5.935 × | 5.060 × | 1.779 × |
| Std | 2.261 × | 2.701 × | 5.349 × | 4.84 × | 7.443 × | 9.881 × | 9.194 × |
| Mean | 4.387 × | 4.432 × | 4.232 × | 4.214 × | 8.405 × | 4.691 × | 4.865 × |
| Std | 4.150E × | 5.236 × | 5.382 × | 4.549 × | 5.093 × | 8.848 × | 3.134 × |
| Mean | 1.188 × | 3.801 × | 5.403 × | 1.677 × | 3.334 × | 3.162 × | 1.781 × |
| Std | 5.051 × | 2.081 × | 2.684 × | 6.50 × | 3.967 × | 5.144 × | 7.002 × |
| Mean | 3.576 × | 6.667 × | 6.667 × | 6.667 × | 4.652 × | 6.667 × | 9.938 × |
| Std | 3.066 × | 1.938 × | 1.899 × | 3.630 × | 4.149 × | 5.015 × | 2.995 × |
| Mean | 0.000 × | 0.000 × | 0.000 × | 0.000 × | 2.10 × | 0.000 × | 8.645 × |
| Std | 0.000 × | 0.000 × | 0.000 × | 0.000 × | 1.13 × | 0.000 × | 3.426 × |
| Mean | 2.423 × | 0.000 × | 0.000 × | 0.000 × | 2.96 × | 0.000 × | 5.324 × |
| Std | 1.327 × | 0.000 × | 0.000 × | 0.000 × | 1.62 × | 0.000 × | 5.818 × |
| Mean | 2.164 × | 2.634 × | 2.189 × | 0.000 × | 9.333 × | 2.776 × | 3.790 × |
| Std | 4.315 × | 1.725 × | 5.793 × | 0.000 × | 2.150 × | 1.073 × | 2.076 × |
| Mean | 2.080 × | 3.878 × | 2.167 × | 0.000 × | 9.597 × | 2.067 × | 4.049 × |
| Std | 8.058 × | 1.339 × | 7.864 × | 0.000 × | 2.736 × | 3.886 × | 1.051 × |
| Mean | 5.000 × | 1.751 × | 6.099 × | 5.507 × | 8.183 × | 3.490 × | 1.158 × |
| Std | 8.102 × | 8.547 × | 1.803 × | 1.656 × | 6.928 × | 7.937 × | 1.646 × |
| Mean | 1.386 × | 1.184 × | 9.036 × | 0.000 × | 1.534 × | 0.000 × | 3.938 × |
| Std | 2.809 × | 5.123 × | 2.856 × | 0.000 × | 2.036 × | 0.000 × | 3.047 × |
| Mean | 2.890 × | 1.782 × | 2.272 × | 3.265 × | 5.072 × | 1.060 × | 1.652 × |
| Std | 1.243 × | 3.270 × | 7.865 × | 1.437 × | 4.089 × | 2.878 × | 1.204 × |
| Mean | 1.473 × | 3.536 × | 1.040 × | 5.339 × | 5.595 × | 7.583 × | 8.704 × |
| Std | 8.628 × | 2.116 × | 3.692 × | 2.591 × | 5.458 × | 2.722 × | 1.443 × |
| Mean | 1.095 × | 4.040 × | 1.986 × | 6.401 × | 2.134 × | 1.435 × | 4.954 × |
| Std | 7.068 × | 3.868 × | 3.389 × | 5.245 × | 2.113 × | 3.360 × | 1.596 × |
| Mean | 6.665 × | 2.451 × | 2.741 × | 1.077 × | 1.316 × | 1.513 × | 1.302 × |
| Std | 2.995 × | 8.827 × | 5.282 × | 3.542 × | 1.770 × | 3.101 × | 3.949 × |
| Mean | 1.836 × | 1.769 × | 1.900 × | 1.395 × | 8.792 × | 6.202 × | 2.488 × |
| Std | 5.037 × | 3.862 × | 3.908 × | 1.084 × | 2.203 × | 2.122 × | 3.279 × |
| Mean | 7.653 × | 0.000 × | 5.258 × | 0.000 × | 7.259 × | 6.534 × | 1.832 × |
| Std | 9.000 × | 0.000 × | 8.550 × | 0.000 × | 4.673 × | 3.388 × | 2.790 × |
| Mean | 2.261 × | 5.679 × | 3.980 × | 3.286 × | 3.177 × | 3.383 × | 7.466 × |
| Std | 5.471 × | 4.972 × | 2.258 × | 4.553 × | 8.810 × | 1.214 × | 2.313 × |
| Mean | 3.129 × | 4.385 × | 0.000 × | 0.000 × | 2.479 × | 0.000 × | 1.552 × |
|
Std | 1.848 × | 1.532 × | 0.000 × | 0.000 × | 4.433 × | 0.000 × | 8.417 × |
Table 5.
Friedman test statistical results of seven algorithms.
Table 5.
Friedman test statistical results of seven algorithms.
| Function | Sum of Squares | Degree of Freedom | Mean Squares | p-Value |
|---|
| 826.667 | 6 | 137.778 | 1.372 × |
| 770.667 | 6 | 128.444 | 4.81761 × |
| 814.067 | 6 | 135.678 | 5.13321 × |
| 821.333 | 6 | 136.889 | 2.39823 × |
| 704.867 | 6 | 117.478 | 4.65662 × |
| 591.533 | 6 | 98.5889 | 6.18862 × |
| 690 | 6 | 115 | 3.39314 × |
| 821.533 | 6 | 136.922 | 1.72524 × |
| 836.267 | 6 | 139.378 | 5.01757 × |
| 440.933 | 6 | 73.4889 | 3.53761 × |
| 836.267 | 6 | 139.378 | 5.01757 × |
| 730.2 | 6 | 121.7 | 3.30782 × |
| 540 | 6 | 90 | 3.39314 × |
| 536.233 | 6 | 89.3722 | 1.27613 × |
| 737.65 | 6 | 122.942 | 4.72241 × |
| 643.467 | 6 | 107.244 | 3.58476 × |
| 742.083 | 6 | 123.681 | 4.75385 × |
| 724.917 | 6 | 120.819 | 1.97730 × |
| 648.467 | 6 | 108.078 | 1.66346 × |
| 727.933 | 6 | 121.322 | 4.19129 × |
| 683.467 | 6 | 113.911 | 4.33937 × |
| 713.867 | 6 | 118.978 | 1.82038 × |
| 562.667 | 6 | 93.7778 | 1.23609 × |
| 590.25 | 6 | 98.375 | 5.55632 × |
| 817.8 | 6 | 136.3 | 2.83026 × |
| 719.333 | 6 | 119.889 | 8.82755 × |
Table 6.
The statistical results of the Wilcoxon rank-sum test for seven algorithms.
Table 6.
The statistical results of the Wilcoxon rank-sum test for seven algorithms.
| Function | modMA | MA | modMA-1 | modMA-2 | PSO | GWO | BOA |
|---|
| | 3.020 × | 3.020 × | 4.504 × | 3.020 × | 3.020 × | 3.020 × |
| | 3.020 × | 3.020 × | 5.494 × | 3.020 × | 3.020 × | 3.020 × |
| | 3.020 × | 3.020 × | 4.504 × | 3.020 × | 3.020 × | 3.020 × |
| | 3.020 × | 3.020 × | 7.773 × | 3.020 × | 3.020 × | 3.020 × |
| | 3.848 × | 2.151 × | 3.265 × | 3.020 × | 3.020 × | 3.020 × |
| | 3.020 × | 1.518 × | 1.058 × | 3.020 × | 3.368 × | 5.369 × |
| | | | | 1.685 × | 1.212 × | 1.212 × |
| | 2.113 × | 2.113 × | 5.561 × | 2.113 × | 2.113 × | 2.113 × |
| | 3.020 × | 3.020 × | 4.975 × | 3.020 × | 3.020 × | 3.020 × |
| | 6.627 × | 3.020 × | 1.761 × | 1.067 × | 3.020 × | 3.020 × |
| | 3.020 × | 3.020 × | 3.020 × | 3.020 × | 3.020 × | 3.020 × |
| | 3.338 × | 1.273 × | 2.581 × | 3.020 × | 6.722 × | 3.020 × |
| | | | | 1.212 × | | 1.212 × |
| | 5.584 × | | | 1.212 × | | 1.212 × |
| | 1.212 × | 1.836 × | 1.212 × | 1.212 × | 5.542 × | 3.337 × |
| | 1.212 × | 1.171 × | 1.212 × | 1.212 × | 8.814 × | 2.788 × |
| | 1.015 × | 1.015 × | 1.910 × | 1.015 × | 7.763 × | 1.014 × |
| | 1.212 × | 1.206 × | 8.152 × | 1.212 × | | 4.523 × |
| | 3.020 × | 3.020 × | 3.690 × | 3.020 × | 3.020 × | 3.020 × |
| | 3.020 × | 2.266 × | 5.106 × | 3.020 × | 3.020 × | 3.020 × |
| | 3.690 × | 2.608 × | 1.529 × | 7.697 × | 5.092 × | 3.020 × |
| | 3.020 × | 3.020 × | 4.077 × | 3.020 × | 3.020 × | 3.020 × |
| | 1.501 × | 7.062 × | 6.627 × | 5.555 × | 3.020 × | 3.020 × |
| | 1.212 × | | 4.777 × | 1.212 × | 1.212 × | 1.455 × |
| | 2.772 × | 9.762 × | 1.182 × | 2.930 × | 2.964 × | 2.964 × |
| | 1.212 × | 3.428 × | | 1.212 × | | 1.167 × |
Table 7.
Space environment settings.
Table 7.
Space environment settings.
| Case Number | Serial Number | Obstacle Center | Obstacle Radius |
|---|
| 1 | 1 | (50, 105) | 70 |
| 2 | (125, 250) | 35 |
| 3 | (304, 400) | 45 |
| 4 | (404, 320) | 50 |
| 5 | (440, 440) | 20 |
| 6 | (280, 310) | 25 |
| 7 | (230, 220) | 25 |
| 8 | (230, 100) | 50 |
| 2 | 1 | (160, 160) | 15 |
| 2 | (50, 105) | 70 |
| 3 | (275, 185) | 80 |
| 4 | (400, 425) | 40 |
| 5 | (125, 250) | 35 |
| 6 | (275, 325) | 28 |
| 7 | (450, 250) | 45 |
| 8 | (175, 410) | 70 |
| 9 | (35, 325) | 50 |
| 10 | (330, 300) | 25 |
Table 8.
The average and standard deviation values of the total cost function over thirty runs.
Table 8.
The average and standard deviation values of the total cost function over thirty runs.
| Case Number | D | Results | MA | modMA-1 | modMA-2 | modMA | BOA | PSO | GWO |
|---|
| 1 | 30 | Avg | 705.432 | 690.146 | 692.234 | 689.532 | 711.309 | 698.138 | 693.970 |
| Std | 6.199 | 1.146 | 3.313 | 1.014 | 7.455 | 6.897 | 2.749 |
| 50 | Avg | 753.834 | 699.756 | 723.285 | 698.312 | 720.847 | 739.353 | 710.557 |
| Std | 18.143 | 2.822 | 11.390 | 1.419 | 13.549 | 18.421 | 9.951 |
| 2 | 30 | Avg | 717.855 | 692.493 | 693.226 | 691.735 | 711.219 | 694.774 | 694.458 |
| Std | 10.718 | 1.729 | 5.087 | 1.359 | 4.180 | 3.273 | 1.675 |
| 50 | Avg | 781.436 | 703.315 | 747.785 | 702.119 | 721.602 | 732.321 | 710.133 |
| Std | 28.557 | 3.123 | 23.130 | 1.978 | 6.189 | 12.167 | 7.973 |


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







