
Effects of Flight and Smoothing Parameters on the Detection of Taxus and Olive Trees with UAV-Borne Imagery

 , ,
, ,  ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
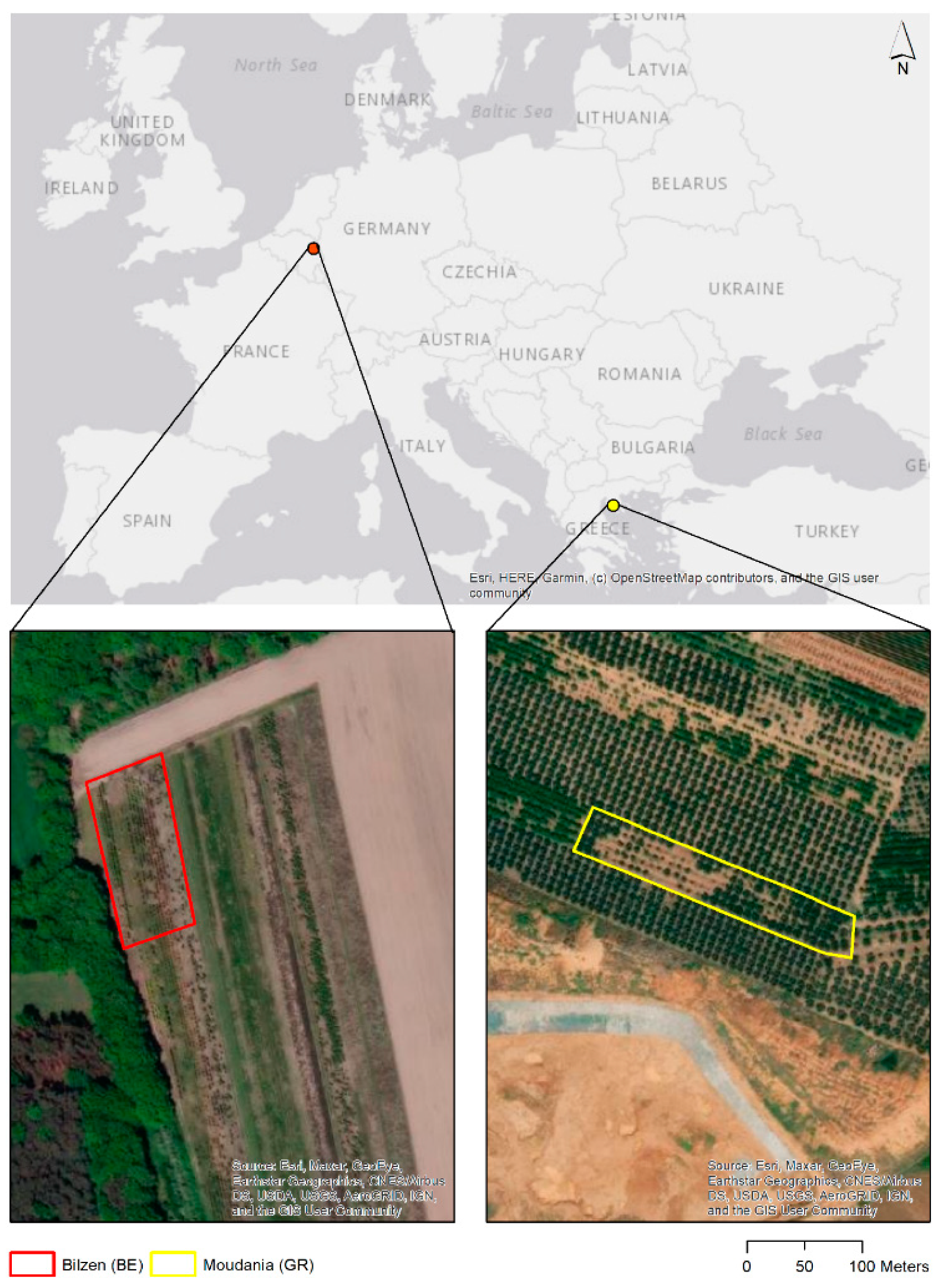
2.1. Study Sites
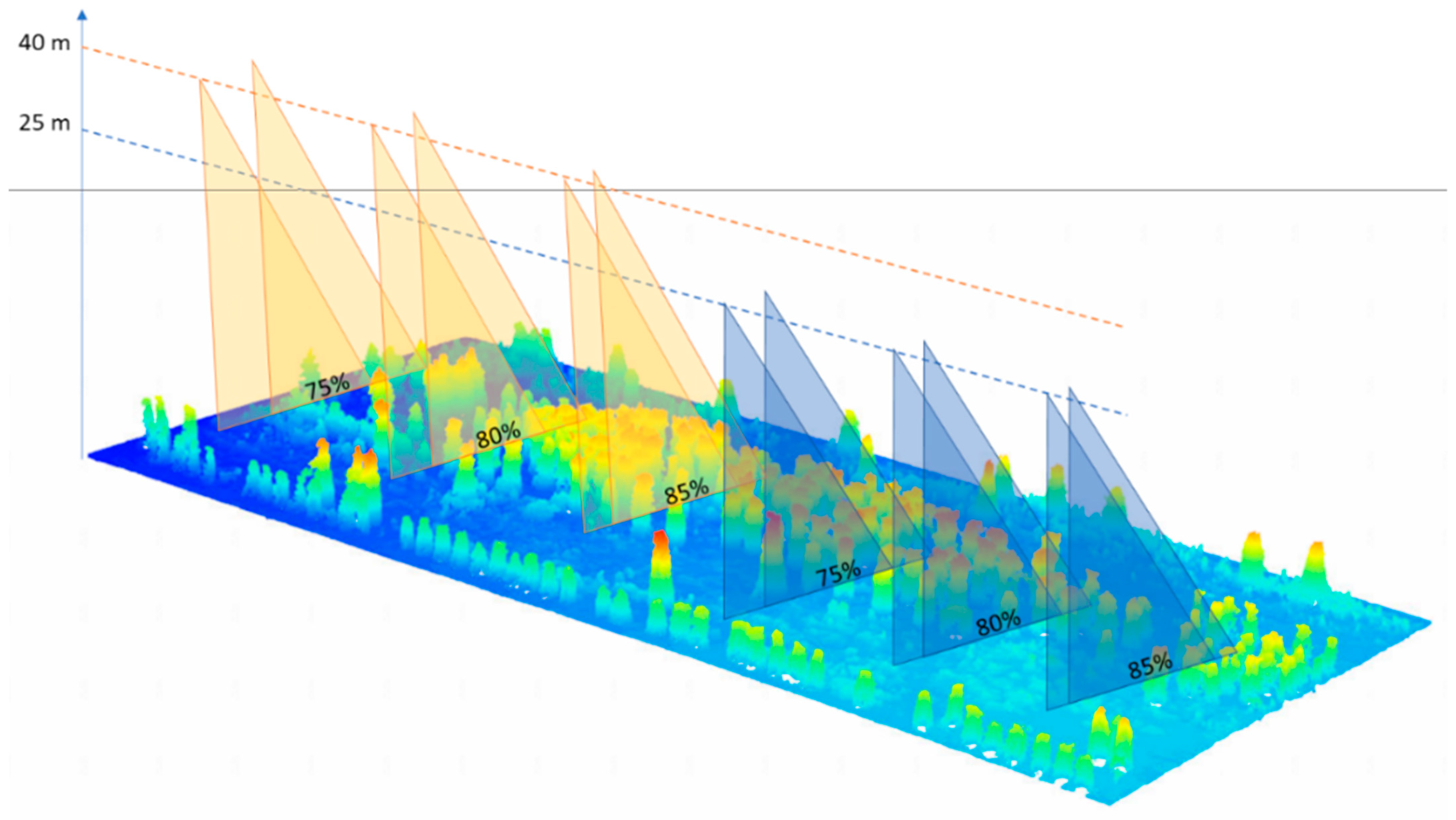
2.2. UAV Data Collection
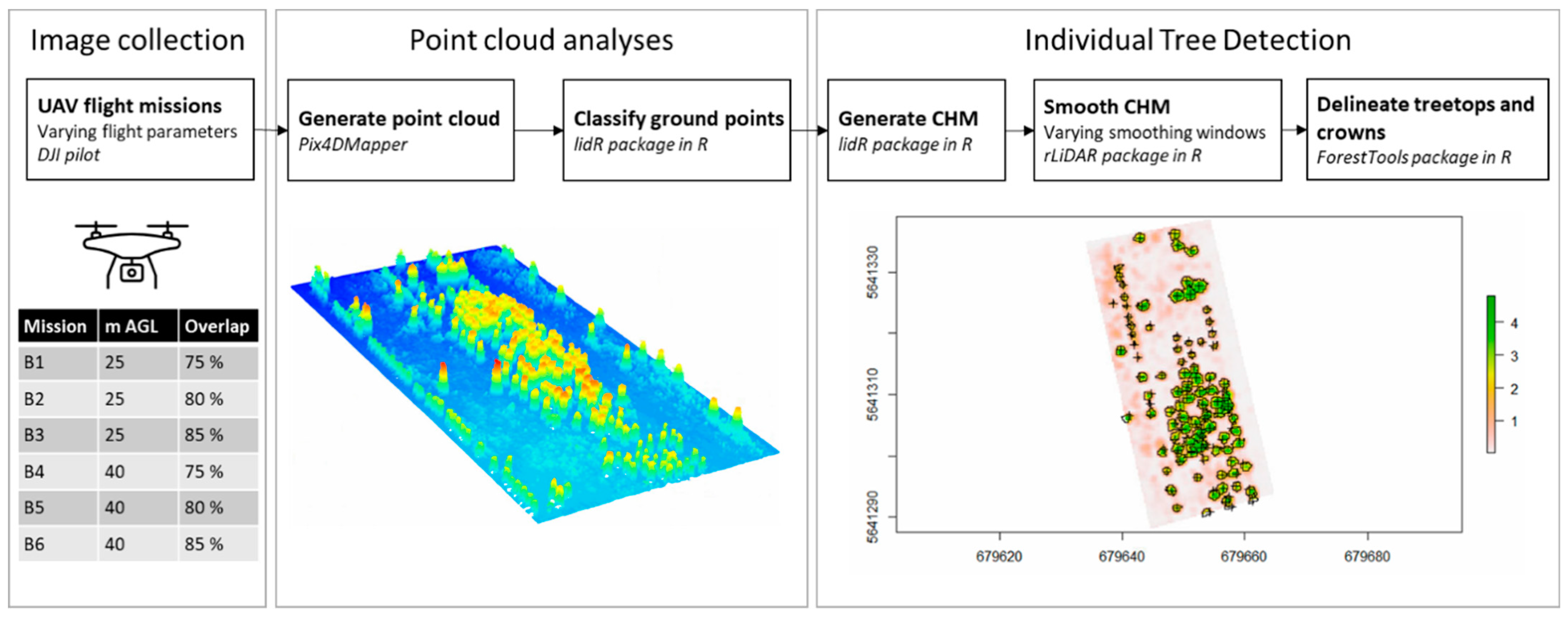
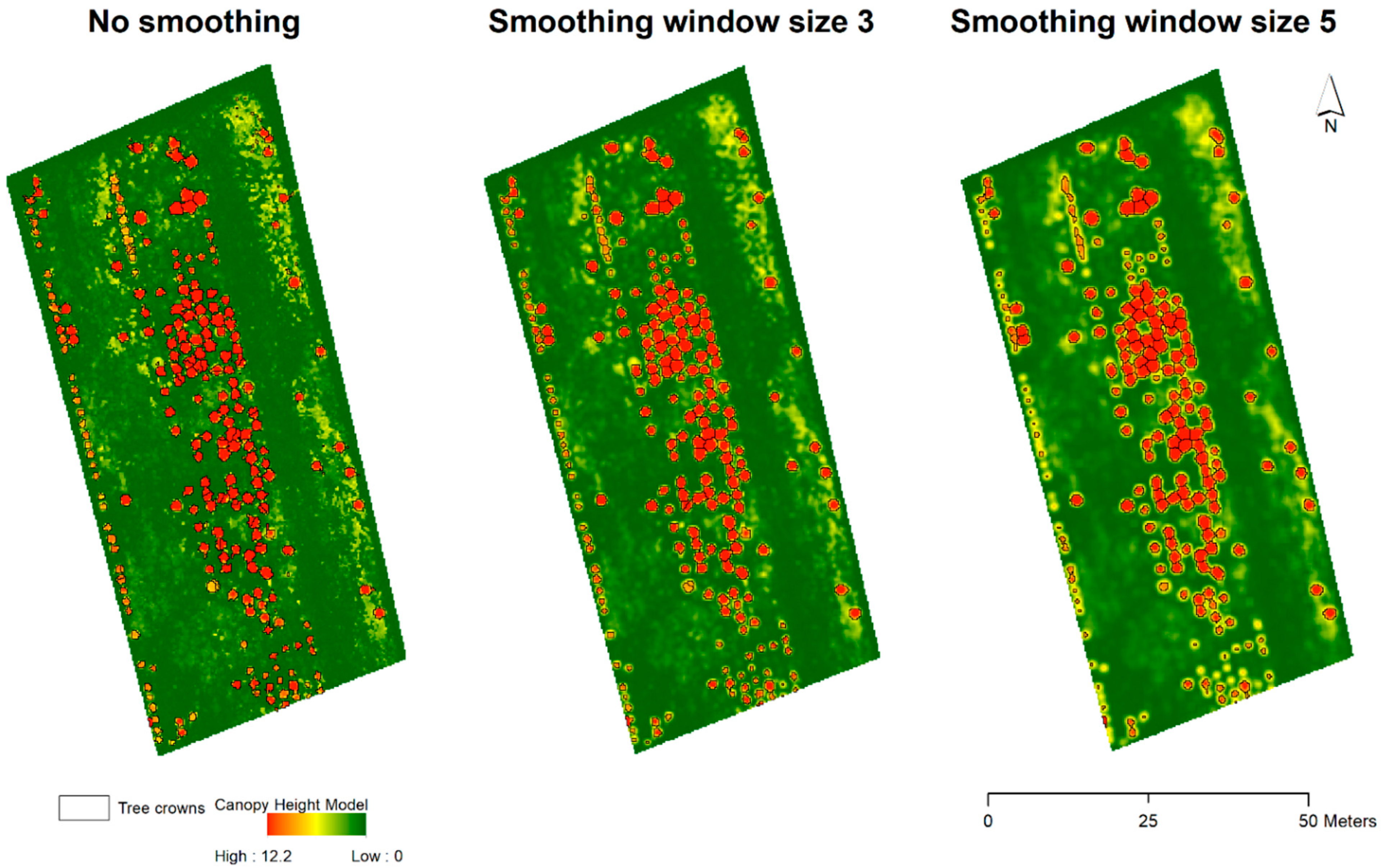
2.3. Image Processing
2.4. ITD Accuracy Assessment
3. Results
3.1. Data Collection
3.2. Taxus Tree Delineation
3.3. Olive Tree Delineation
4. Discussion
4.1. Tree Delineation Performance
4.2. Flight Parameterization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Toth, C.; Jóźków, G. Remote Sensing Platforms and Sensors: A Survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Demir, K.A.; Cicibas, H.; Arica, N. Unmanned Aerial Vehicle Domain: Areas of Research. Def. Sci. J. 2015, 65, 319–329. [Google Scholar] [CrossRef]
- Tsiamis, N.; Efthymiou, L.; Tsagarakis, K.P. A Comparative Analysis of the Legislation Evolution for Drone Use in Oecd Countries. Drones 2019, 3, 75. [Google Scholar] [CrossRef] [Green Version]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicles Forest Remote Sensing—a Systematic Review. Part II: Research Applications. Forests 2021, 12, 397. [Google Scholar] [CrossRef]
- Rodríguez-Puerta, F.; Gómez-García, E.; Martín-García, S.; Pérez-Rodríguez, F.; Prada, E. UAV-Based LiDAR Scanning for Individual Tree Detection and Height Measurement in Young Forest Permanent Trials. Remote Sens. 2022, 14, 170. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Xiang, J.; Jin, Y.; Liu, R.; Yan, J.; Wang, L. Boost Precision Agriculture with Unmanned Aerial Vehicle Remote Sensing and Edge Intelligence: A Survey. Remote Sens. 2021, 13, 4387. [Google Scholar] [CrossRef]
- Mohan, M.; Leite, R.V.; Broadbent, E.N.; Wan Mohd Jaafar, W.S.; Srinivasan, S.; Bajaj, S.; Dalla Corte, A.P.; Do Amaral, C.H.; Gopan, G.; Saad, S.N.M.; et al. Individual Tree Detection Using UAV-Lidar and UAV-SfM Data: A Tutorial for Beginners. Open Geosci. 2021, 13, 1028–1039. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Borra-Serrano, I.; Manuel Peña, J. Assessing UAV-Collected Image Overlap Influence on Computation Time and Digital Surface Model Accuracy in Olive Orchards. Precis. Agric. 2018, 19, 115–133. [Google Scholar] [CrossRef]
- Ni, W.; Sun, G.; Pang, Y.; Zhang, Z.; Liu, J.; Yang, A.; Wang, Y.; Zhang, D. Mapping Three-Dimensional Structures of Forest Canopy Using UAV Stereo Imagery: Evaluating Impacts of Forward Overlaps and Image Resolutions With LiDAR Data as Reference. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3578–3589. [Google Scholar] [CrossRef]
- Swayze, N.C.; Tinkham, W.T.; Vogeler, J.C.; Hudak, A.T. Influence of Flight Parameters on UAS-Based Monitoring of Tree Height, Diameter, and Density. Remote Sens. Environ. 2021, 263, 112540. [Google Scholar] [CrossRef]
- Tu, Y.H.; Phinn, S.; Johansen, K.; Robson, A.; Wu, D. Optimising Drone Flight Planning for Measuring Horticultural Tree Crop Structure. ISPRS J. Photogramm. Remote Sens. 2020, 160, 83–96. [Google Scholar] [CrossRef] [Green Version]
- Young, D.J.N.; Koontz, M.J.; Weeks, J.M. Optimizing Aerial Imagery Collection and Processing Parameters for Drone-based Individual Tree Mapping in Structurally Complex Conifer Forests. Methods Ecol. Evol. 2022, 2022, 1447–1463. [Google Scholar] [CrossRef]
- Creasy, M.B.; Tinkham, W.T.; Hoffman, C.M.; Vogeler, J.C. Potential for Individual Tree Monitoring in Ponderosa Pine Dominated Forests Using Unmanned Aerial System Structure from Motion Point Clouds. Can. J. For. Res. 2021, 51, 1093–1105. [Google Scholar] [CrossRef]
- Pouliot, D.A.; King, D.J.; Bell, F.W.; Pitt, D.G. Automated Tree Crown Detection and Delineation in High-Resolution Digital Camera Imagery of Coniferous Forest Regeneration. Remote Sens. Environ. 2002, 82, 322–334. [Google Scholar] [CrossRef]
- Kameyama, S.; Sugiura, K. Effects of Differences in Structure from Motion Software on Image Processing of Unmanned Aerial Vehicle Photography and Estimation of Crown Area and Tree Height in Forests. Remote Sens. 2021, 13, 626. [Google Scholar] [CrossRef]
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. lidR: An R Package for Analysis of Airborne Laser Scanning (ALS) Data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Korpela, I.; Anttila, P.; Pitkänen, J. The Performance of a Local Maxima Method for Detecting Individual Tree Tops in Aerial Photographs. Int. J. Remote Sens. 2006, 27, 1159–1175. [Google Scholar] [CrossRef]
- Silva, C.A.; Crookston, N.L.; Hudak, A.T.; Vierling, L.A.; Klauberg, C.; Cardil, A.; Hamamura, C. rLiDAR: Data Processing and Visualization. R Package Version 0.1.5. 2021. Available online: https://CRAN.R-project.org/package=rLiDAR (accessed on 28 June 2022).
- Plowright, A.; Roussel, J.-R. ForestTools: Analyzing Remotely Sensed Forest Data. R Package Version 0.2.5. 2021. Available online: https://CRAN.R-project.org/package=ForestTools (accessed on 28 June 2022).
- Belmonte, A.; Sankey, T.; Biederman, J.A.; Bradford, J.; Goetz, S.J.; Kolb, T.; Woolley, T. UAV-Derived Estimates of Forest Structure to Inform Ponderosa Pine Forest Restoration. Remote Sens. Ecol. Conserv. 2020, 6, 181–197. [Google Scholar] [CrossRef]
- Stateras, D.; Kalivas, D. Assessment of Olive Tree Canopy Characteristics and Yield Forecast Model Using High Resolution UAV Imagery. Agriculture 2020, 10, 385. [Google Scholar] [CrossRef]
- Fernández, J.E.; Diaz-Espejo, A.; D’Andria, R.; Sebastiani, L.; Tognetti, R. Potential and Limitations of Improving Olive Orchard Design and Management through Modelling. Plant Biosyst. 2008, 142, 130–137. [Google Scholar] [CrossRef] [Green Version]
- Šiljeg, A.; Panđa, L.; Domazetović, F.; Marić, I.; Gašparović, M.; Borisov, M.; Milošević, R. Comparative Assessment of Pixel and Object-Based Approaches for Mapping of Olive Tree Crowns Based on UAV Multispectral Imagery. Remote Sens. 2022, 14, 757. [Google Scholar] [CrossRef]
- Karydas, C.; Gewehr, S.; Iatrou, M.; Iatrou, G.; Mourelatos, S. Olive Plantation Mapping on a Sub-Tree Scale with Object-Based Image Analysis of Multispectral UAV Data; Operational Potential in Tree Stress Monitoring. J. Imaging 2017, 3, 57. [Google Scholar] [CrossRef] [Green Version]
- Jurado, J.M.; Ortega, L.; Cubillas, J.J.; Feito, F.R. Multispectral Mapping on 3D Models and Multi-Temporal Monitoring for Individual Characterization of Olive Trees. Remote Sens. 2020, 12, 1106. [Google Scholar] [CrossRef] [Green Version]
- de Lima, R.S.; Lang, M.; Burnside, N.G.; Peciña, M.V.; Arumäe, T.; Laarmann, D.; Ward, R.D.; Vain, A.; Sepp, K. An Evaluation of the Effects of Uas Flight Parameters on Digital Aerial Photogrammetry Processing and Dense-Cloud Production Quality in a Scots Pine Forest. Remote Sens. 2021, 13, 1121. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission ID | Flight Altitude (m AGL) | Image Overlap (%) | Total Flight Time | Total Number of Images (Size) |
|---|---|---|---|---|
| B1 | 25 | 75 | 7 min 9 s | 155 (1.22 GB) |
| B2 | 25 | 80 | 8 min 32 s | 200 (1.59 GB) |
| B3 | 25 | 85 | 10 min 55 s | 277 (2.21 GB) |
| B4 | 40 | 75 | 6 min 56 s | 97 (767 MB) |
| B5 | 40 | 80 | 7 min 20 s | 124 (994 MB) |
| B6 | 40 | 85 | 9 min 11 s | 202 (1.59 GB) |
| No Smoothing Window | Smoothing Window Size 3 | Smoothing Window Size 5 | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| B1 | B2 | B3 | B4 | B5 | B6 | B1 | B2 | B3 | B4 | B5 | B6 | B1 | B2 | B3 | B4 | B5 | B6 | |
| TTC | 281 | 285 | 292 | 280 | 296 | 283 | 236 | 233 | 235 | 231 | 237 | 236 | 203 | 211 | 209 | 195 | 209 | 209 |
| TP | 231 | 233 | 235 | 230 | 234 | 235 | 234 | 233 | 233 | 231 | 235 | 234 | 201 | 210 | 208 | 194 | 208 | 208 |
| FN | 6 | 4 | 2 | 7 | 3 | 2 | 3 | 4 | 4 | 6 | 2 | 3 | 36 | 27 | 29 | 43 | 29 | 29 |
| FP | 50 | 52 | 57 | 50 | 62 | 48 | 2 | 0 | 2 | 0 | 2 | 2 | 2 | 1 | 1 | 1 | 1 | 1 |
| r | 0.97 | 0.98 | 0.99 | 0.97 | 0.99 | 0.99 | 0.99 | 0.98 | 0.98 | 0.97 | 0.99 | 0.99 | 0.85 | 0.89 | 0.88 | 0.82 | 0.88 | 0.88 |
| p | 0.82 | 0.82 | 0.80 | 0.82 | 0.79 | 0.83 | 0.99 | 1.00 | 0.99 | 1.00 | 0.99 | 0.99 | 0.99 | 1.00 | 1.00 | 0.99 | 1.00 | 1.00 |
| F | 0.89 | 0.89 | 0.89 | 0.89 | 0.88 | 0.90 | 0.99 | 0.99 | 0.99 | 0.99 | 0.99 | 0.99 | 0.91 | 0.94 | 0.93 | 0.90 | 0.93 | 0.93 |
| TH (m, mean ± SD) | 3.37 ± 1.05 | 3.39 ± 1.01 | 3.37 ± 1.05 | 3.47 ± 1.03 | 3.40 ± 1.17 | 3.48 ± 1.10 | 3.42 ± 0.89 | 3.42 ± 0.86 | 3.43 ± 0.8 | 3.42 ± 0.90 | 3.43 ± 0.95 | 3.42 ± 0.92 | 3.01 ± 0.91 | 2.98 ± 0.90 | 3.04 ± 0.93 | 3.08 ± 0.93 | 3.03 ± 0.95 | 3.00 ± 0.91 |
| CA (m2, mean ± SD) | 1.47 ± 0.90 | 1.46 ± 0.87 | 1.49 ± 0.92 | 1.52 ± 0.91 | 1.47 ± 0.91 | 1.50 ± 0.83 | 1.71 ± 0.95 | 1.76 ± 0.95 | 1.83 ± 1.01 | 1.82 ± 1.08 | 1.79 ± 1.01 | 1.73 ± 0.97 | 1.91 ± 1.22 | 1.87 ± 1.18 | 2.01 ± 1.25 | 2.07 ± 1.34 | 1.96 ± 1.24 | 1.89 ± 1.20 |
| No Smoothing | Smoothing Window Size 3 | Smoothing Window Size 5 | |
|---|---|---|---|
| TTC | 389 | 356 | 297 |
| TP | 147 | 152 | 130 |
| FN | 11 | 6 | 28 |
| FP | 231 | 198 | 139 |
| r | 0.93 | 0.96 | 0.82 |
| p | 0.39 | 0.43 | 0.48 |
| F | 0.55 | 0.60 | 0.61 |
| TH (m, mean ± SD) | 2.55 ± 1.14 | 2.29 ± 0.98 | 2.12 ± 0.85 |
| CA (m2, mean ± SD) | 6.83 ± 6.32 | 8.70 ± 5.99 | 11.13 ± 6.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ottoy, S.; Tziolas, N.; Van Meerbeek, K.; Aravidis, I.; Tilkin, S.; Sismanis, M.; Stavrakoudis, D.; Gitas, I.Z.; Zalidis, G.; De Vocht, A. Effects of Flight and Smoothing Parameters on the Detection of Taxus and Olive Trees with UAV-Borne Imagery. Drones 2022, 6, 197. https://doi.org/10.3390/drones6080197
Ottoy S, Tziolas N, Van Meerbeek K, Aravidis I, Tilkin S, Sismanis M, Stavrakoudis D, Gitas IZ, Zalidis G, De Vocht A. Effects of Flight and Smoothing Parameters on the Detection of Taxus and Olive Trees with UAV-Borne Imagery. Drones. 2022; 6(8):197. https://doi.org/10.3390/drones6080197
Chicago/Turabian StyleOttoy, Sam, Nikolaos Tziolas, Koenraad Van Meerbeek, Ilias Aravidis, Servaas Tilkin, Michail Sismanis, Dimitris Stavrakoudis, Ioannis Z. Gitas, George Zalidis, and Alain De Vocht. 2022. "Effects of Flight and Smoothing Parameters on the Detection of Taxus and Olive Trees with UAV-Borne Imagery" Drones 6, no. 8: 197. https://doi.org/10.3390/drones6080197
APA StyleOttoy, S., Tziolas, N., Van Meerbeek, K., Aravidis, I., Tilkin, S., Sismanis, M., Stavrakoudis, D., Gitas, I. Z., Zalidis, G., & De Vocht, A. (2022). Effects of Flight and Smoothing Parameters on the Detection of Taxus and Olive Trees with UAV-Borne Imagery. Drones, 6(8), 197. https://doi.org/10.3390/drones6080197