
Small Fixed-Wing UAV Radar Cross-Section Signature Investigation and Detection and Classification of Distance Estimation Using Realistic Parameters of a Commercial Anti-Drone System

 , ,
, ,
Abstract
:1. Introduction
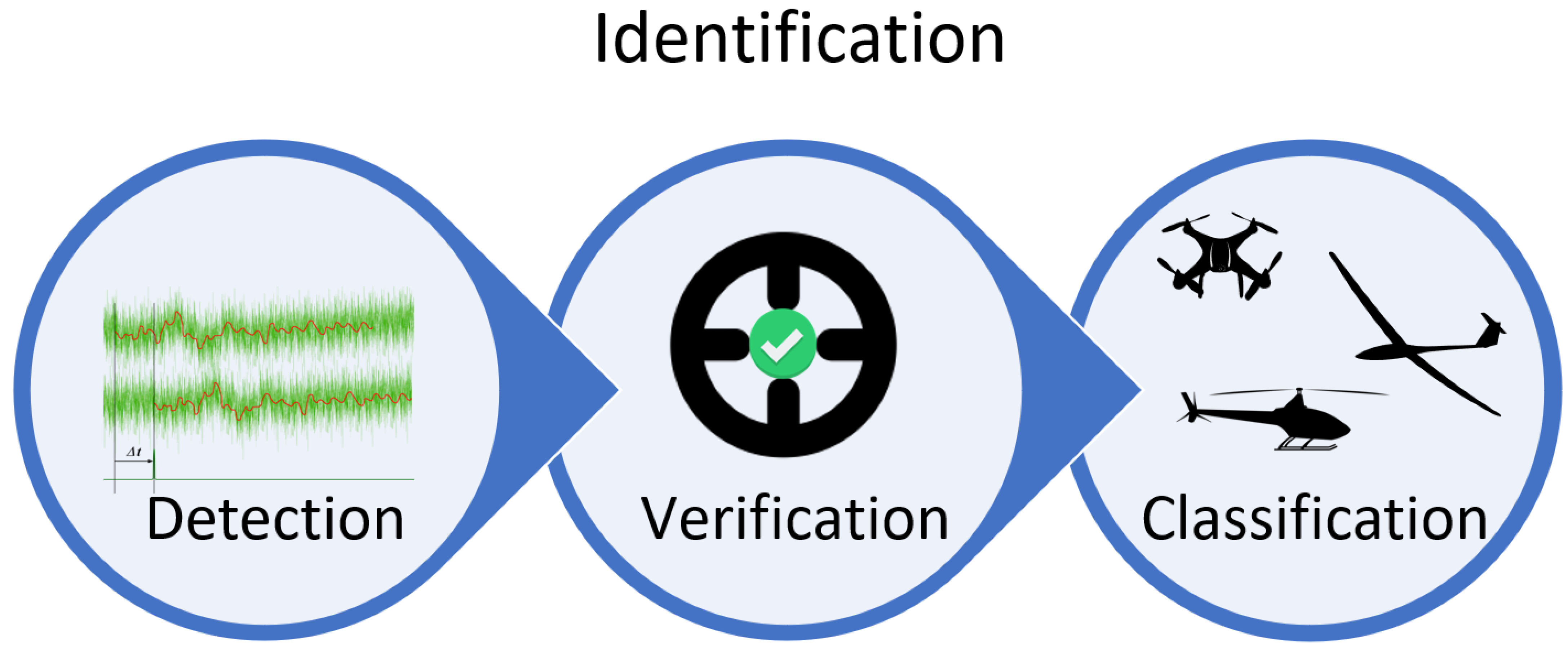
- Video-based: Airspace monitoring using common visible spectrum cameras.
- Sound-based: Monitoring the acoustic frequencies.
- Radar-based: Using special purpose radar systems for drones.
- Temperature-based: Tracing heat sources.
- RF-based: Attempting to locate the radio frequencies the drones are transmitting towards their Ground Control Station (GCS), satellites, etc.
- The announcement of the Euclid UAV RCS results in the 3–16 Ghz spectrum.
- The estimation of the Rmax distances in which the Elvira Anti Drone System will detect and classify the Euclid UAV.
1.1. Radar Cross Section
1.2. Radars for Drones
1.3. Quadcopters RCS
- Frequencies of interest, when studying multicopter vehicles, are located within bands C, X, Ku and K according to the Institute of Electrical and Electronics Engineers (IEEE) [53].
- The mean RCS value of DJI Inspire 1 are located in the −14.24 to −15 dBsm span, between two individual studies.
- The RCS values of a typical multicopter are directly comparable to those of a bird. This conclusion suggests the importance of the effectiveness of the verification and classification algorithms running in a drone identification system, as conventional radar would probably reject these small targets.
- A review of the physical dimensions specifications of each displayed drone uncovers a direct correlation between RCS and the volume of each drone.
2. Materials and Methods
2.1. Drones under Study
2.2. POFACETS Software
2.3. MeshLab Software
- Mesh cleaning, automatic filling of holes, duplicate or unreferenced vertices removal;
- Remeshing according to the user preferences;
- Mesh coloring, mesh inspection, etc.
2.4. Simulation Prerequisites
2.4.1. Models .stl Files Construction or Acquisition
2.4.2. Target Material Electrical Properties
2.4.3. Proper Model Placing in POFACETS
- A check was made to verify that the scale of the targets corresponds to their correct dimensions in POFACETS. It was found that the dimensions were wrongly displayed, enlarged by a factor of 103. The scale of both targets was fixed in MeshLab software.
- The last preliminary action was to check both targets for their normal surface’s direction, a type of check that is referred to simply as a “check for normal”. By conducting this type of check, it can be determined whether the mesh of the target is designed with the correct direction or not. Every facet within a mesh has two sides: the front and back side. In order for the POFACETS software to be able to calculate the scattered radiation correctly, all target facets must be designed in such a way where the front side is the one that is in touch with the model’s surrounding space (that is, with the atmosphere in a real model). MeshLab software can visualize each facet’s direction with small line segments, as Figure 8 illustrates for the Euclid UAV. Each line segment that has a direction from the aircraft’s skin towards the surrounding space indicates a properly placed surface.
2.5. Simulation Parameters
3. Results
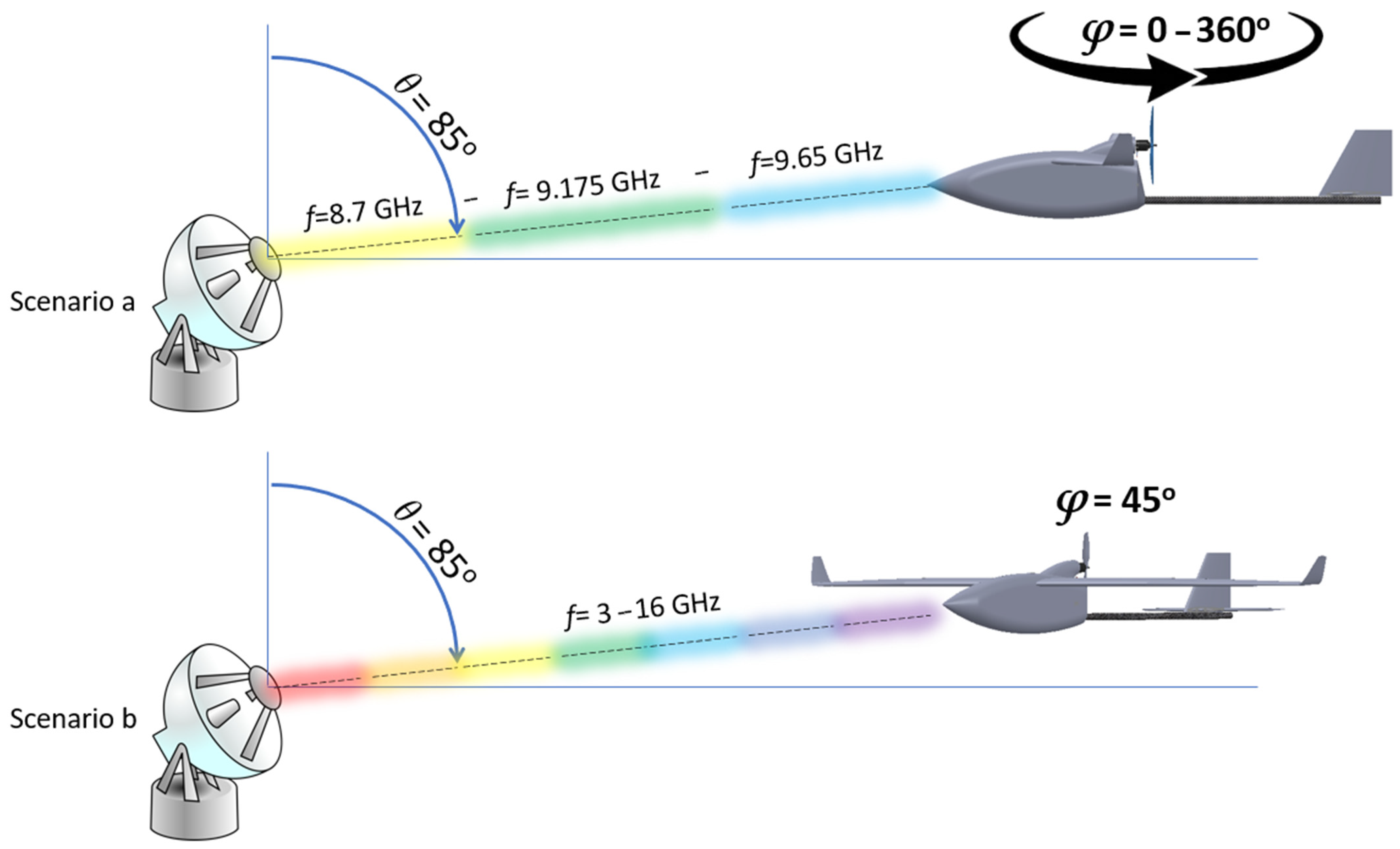
3.1. Scenario A Results
3.1.1. Results for θ = 85°, φ = 0–360°, f = 8.7 Ghz
3.1.2. Results for θ = 85°, φ = 0–360°, f = 9.175 Ghz
3.1.3. Results for θ = 85°, φ = 0–360°, f = 9.65 Ghz
3.1.4. Synopsis and Discussion of the Scenario A Results
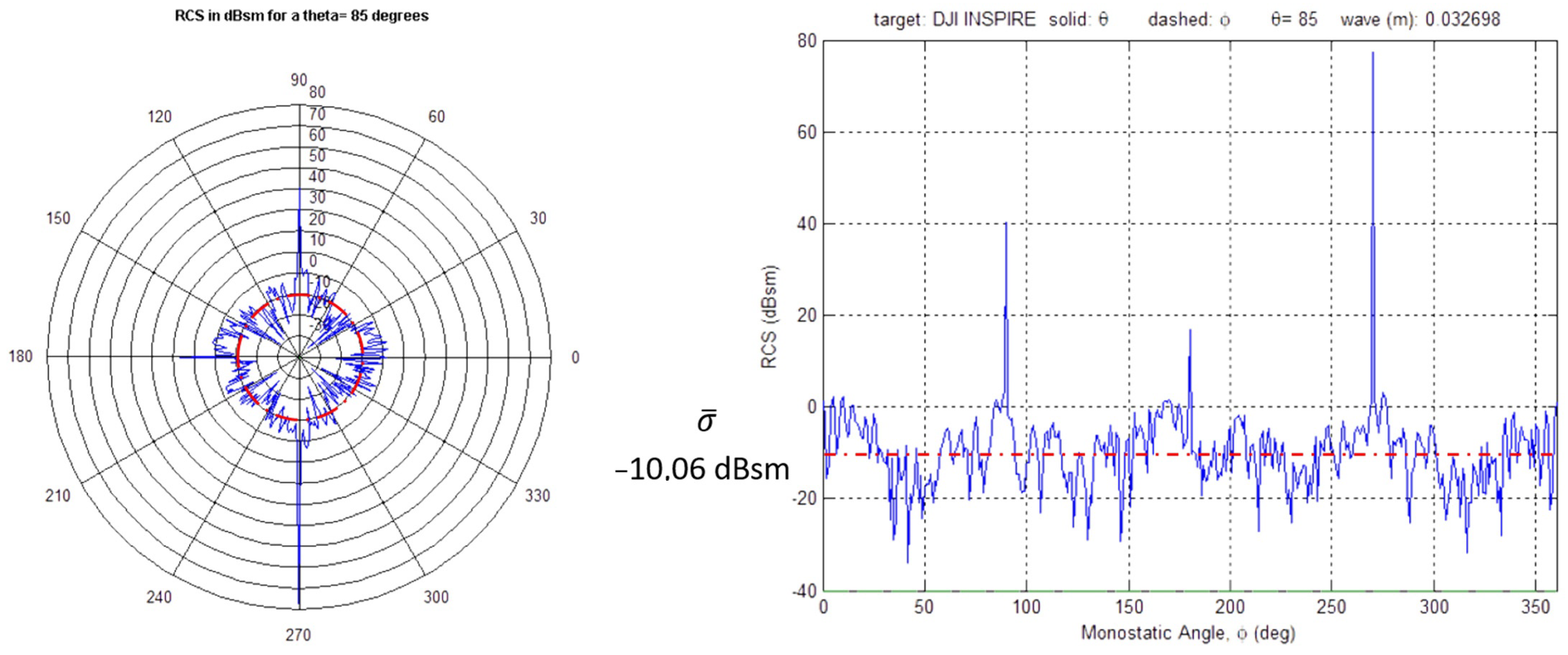
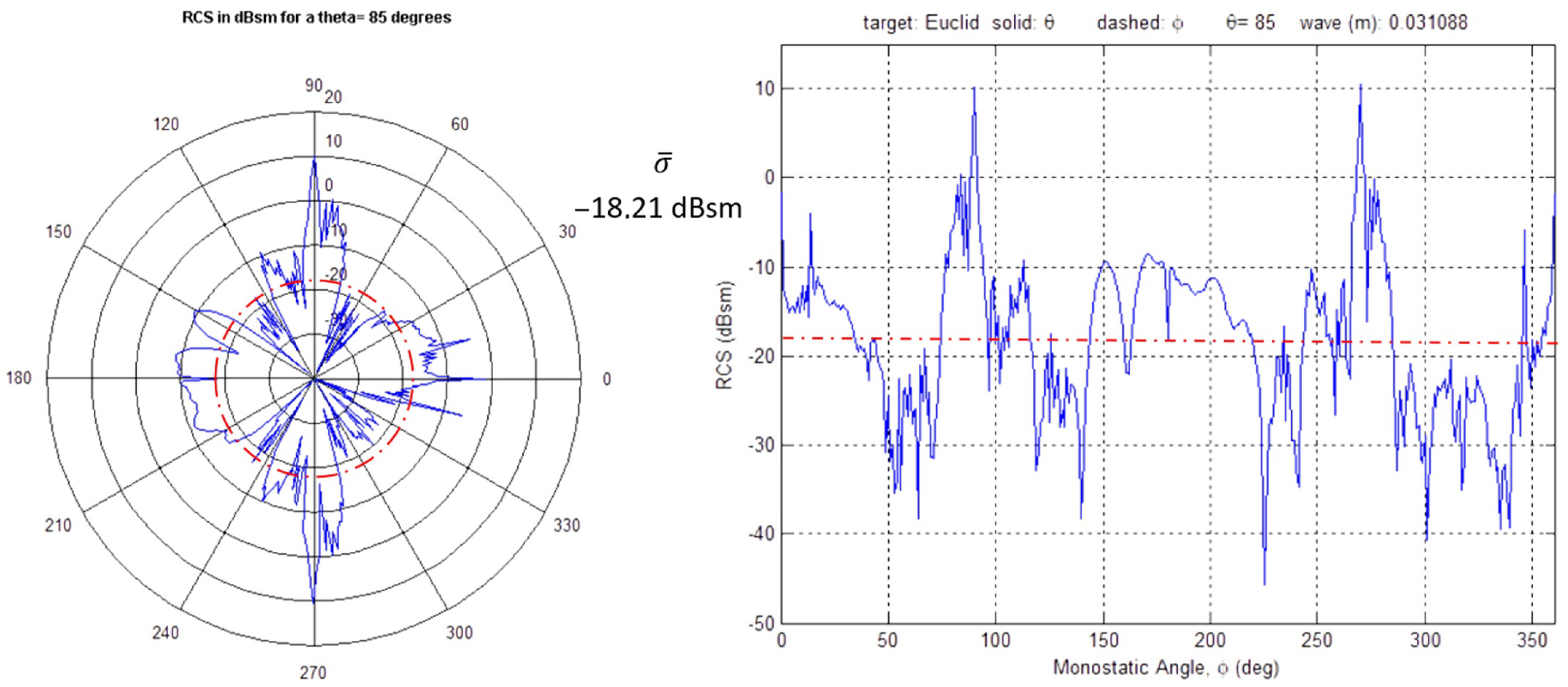
- The width in which the DJI Inspire 1 mean RCS is located is −9.29 to −10.06 dBsm. The corresponding width of the Euclid UAV is −16.96 to −18.21 dBsm. Given this, it can be concluded that, regarding these specific viewing angles and frequencies, the Euclid UAV is a harder target to be identified compared to the DJI Inspire 1. This statement confirms the H1 hypothesis stated in the introduction of this study.
- The Euclid UAV presents increased mean RCS values at φ = 90° and φ = 270° angles. These angles represent the aircraft’s wings. Contrarily, small mean RCS values are observed near the aircraft’s nose. This means that the identification of the Euclid UAV would be even harder using the Elvira Anti Drone System, when the aircraft directly approaches the radar system.
- The DJI Inspire 1 quadcopter presents nearly symmetric RCS signatures throughout the φ = 0°–360° circle. Some spikes appear at φ = 90° and φ = 270°. This symmetric signature is correlated with the nearly symmetric geometry of the target itself. This means that DJI Inspire 1 RCS is independent from the φ angle when the vehicle is approaching the radar.
3.2. Scenario B Results (θ = 85°, φ = 45°, f = 3–16 Ghz)
- The mean RCS values of both targets within the 3 to 16 GHz spectrum are about 5 dBsm smaller compared to their corresponding values within the 8.7 to 9.65 GHz spectrum of Scenario A.
- DJI Inspire 1 RCS presents relatively large fluctuations. Peak to peak absolute values of these fluctuations can reach 20 dBsm for θ = 85° and φ = 45° within the 3 to 16 Ghz spectrum. However, the amplitude of the fluctuations seems to be constant throughout the whole simulation spectrum.
- It can be stated that the Euclid UAV RCS is higher in the region of 3 to 12 GHz, and it decreases in the region of 12 to 16 GHz. As a result, the Euclid UAV would be less visible to radars that operate at the Ku band. The absolute value of the fluctuation’s amplitude within each of these regions is about 10 dBsm, expressively smaller than the DJI Inspire.
- Mean RCS Values ( ) for this scenario are 13.92 dBsm for the DJI Inspire and −22.77 dBsm for the Euclid UAV.
- Aside from Scenario A, Scenario B also confirms the H1 hypothesis, which was stated in the introduction of this study.
3.3. Euclid UAV Detection and Classification Range Estimation
4. Discussion
- Study of different aerodynamic designs of small aerial vehicles, such as small flying wings, blended wing body vehicles, etc.
- Study of the above vehicles in different frequency widths than other commercial anti drone systems than the Elvira Anti Drone System.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 5G | Fifth Generation |
| AI | Artificial Intelligence |
| BWB | Blended Wing Body |
| CRP | Carbon-Reinforced Plastics |
| DL | Deep Learning |
| EPO | Expanded PolyOlefin |
| FPV | First Person View |
| FRP | Fiber-Reinforced Plastics |
| GCS | Ground Control Station |
| HDPE | High-Density PolyEthylene |
| IEEE | Institute of Electrical and Electronics Engineers |
| IoT | Internet of Tings |
| IoD | Internet of Drones |
| LDPE | Low-Density PolyEthylene |
| LLDPE | Linear Low-Density PolyEthylene |
| LTE | Long-Term Evolution |
| LW-PLA | LightWeight PolyLactic Acid |
| MIMO | Multiple Input Multiple Output |
| ML | Machine Learning |
| NR | New Radio |
| PEC | Perfect Electric Conductor |
| PLA | PolyLactic Acid |
| PO | Physical Optics |
| PP | PolyPropylene |
| RCS | Radar Cross-Section |
| TPV | ThermoPlastic Vulcanizates |
| UAS | Unmanned Aerial System |
| UAV | Unmanned Aerial Vehicle |
| VTOL | Vertical Take-Off and Landing |
References
- Kardasz, P.; Doskocz, J. Drones and Possibilities of Their Using. J. Civ. Env. Eng. 2016, 6, 1–7. [Google Scholar] [CrossRef]
- Rohling, H. (Ed.) 2017 18th International Radar Symposium (IRS): 28–30 June 2017; Cuvillier Verlag: Göttingen, Germany, 2017; ISBN 978-1-5090-4312-5. [Google Scholar]
- Wild, G.; Murray, J.; Baxter, G. Exploring Civil Drone Accidents and Incidents to Help Prevent Potential Air Disasters. Aerospace 2016, 3, 22. [Google Scholar] [CrossRef] [Green Version]
- Shvetsova, S.; Shvetsov, A. Safety When Flying Unmanned Aerial Vehicles at Transport Infrastructure Facilities. Transp. Res. Procedia 2021, 54, 397–403. [Google Scholar] [CrossRef]
- Bisio, I.; Garibotto, C.; Lavagetto, F.; Sciarrone, A.; Zappatore, S. Unauthorized Amateur UAV Detection Based on WiFi Statistical Fingerprint Analysis. IEEE Commun. Mag. 2018, 56, 106–111. [Google Scholar] [CrossRef]
- Samaras, S.; Diamantidou, E.; Ataloglou, D.; Sakellariou, N.; Vafeiadis, A.; Magoulianitis, V.; Lalas, A.; Dimou, A.; Zarpalas, D.; Votis, K.; et al. Deep Learning on Multi Sensor Data for Counter UAV Applications—A Systematic Review. Sensors 2019, 19, 4837. [Google Scholar] [CrossRef] [Green Version]
- Guo, M.; Lin, Y.; Sun, Z.; Fu, Y. Research on Monostatic Radar Cross Section Simulation of Small Unmanned Aerial Vehicles. In Proceedings of the 2018 International Conference on Microwave and Millimeter Wave Technology (ICMMT2018), Chengdu, China, 7–11 May 2018. [Google Scholar]
- Schneebeli, M.; Leuenberger, A.; Wabeke, L.; Kloke, K.; Kitching, C.; Siegenthaler, U.; Wellig, P. Drone Detection with a Multistatic C-Band Radar. In Proceedings of the 2021 21st International Radar Symposium (IRS), Berlin, Germany, 21 June 2021; pp. 1–10. [Google Scholar]
- Ezuma, M.; Anjinappa, C.K.; Semkin, V.; Guvenc, I. Comparative Analysis of Radar Cross Section Based UAV Classification Techniques. arXiv 2021, arXiv:2112.09774. [Google Scholar]
- Ezuma, M.; Anjinappa, C.K.; Funderburk, M.; Guvenc, I. Radar Cross Section Based Statistical Recognition of UAVs at Microwave Frequencies. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 27–46. [Google Scholar] [CrossRef]
- Semkin, V.; Yin, M.; Hu, Y.; Mezzavilla, M.; Rangan, S. Drone Detection and Classification Based on Radar Cross Section Signatures. In Proceedings of the 2020 International Symposium on Antennas and Propagation (ISAP), Osaka, Japan, 25 January 2021; pp. 223–224. [Google Scholar]
- Petrovic, P.Z.; Savic, S.V.; Ilic, M.M. Electromagnetic Modelling of Micro-Doppler Signatures of Commercial Airborne Drones. In Proceedings of the 2021 29th Telecommunications Forum (TELFOR), Belgrade, Serbia, 23 November 2021; pp. 1–4. [Google Scholar]
- Max Chung, S.S.; Tuan, S.-C. Changing the Radar Cross Section of Quadcopter by Shape Modification. In Proceedings of the 2021 IEEE Asia-Pacific Microwave Conference (APMC), Brisbane, Australia, 28 November 2021; pp. 350–352. [Google Scholar]
- Unalir, D.; Sezgin, S.; Yuva, C.S.; Gokdogan, B.Y.; Aydin, E. Low Radar Cross Section UAV Design in X-Band. In Proceedings of the 2022 30th Signal Processing and Communications Applications Conference (SIU), Safranbolu, Turkey, 15 May 2022; pp. 1–4. [Google Scholar]
- Chung, S.S.M.; Tuan, S.-C. Frequency and Incident Angle Effects on Radar Cross Section of Quadcopter Unmanned Aerial Vehicle. In Proceedings of the 2021 Photonics & Electromagnetics Research Symposium (PIERS), Hangzhou, China, 21 November 2021; pp. 2173–2177. [Google Scholar]
- Cai, K.-C.; Liao, C.-T.; Chen, C.-H.; Chen, H.-M. Study on Radar Cross-Section Characteristics of Quadrocopter Group Flight. In Proceedings of the 2021 International Symposium on Antennas and Propagation (ISAP), Taipei, Taiwan, 19 October 2021; pp. 1–2. [Google Scholar]
- Xiaoxiao, H. Study on Radar Cross Section for Flying-Wing Unmanned Aerial Vehicle with Close Formation Flight. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences (ICAS), Belo Horizonte, Brazil, 9–14 September 2018; pp. 1–5. [Google Scholar]
- ÖzdemİR, C. Radar cross Section Analysis of Unmanned Aerial Vehicles Using Predics. Int. J. Eng. Geosci. 2020, 5, 144–149. [Google Scholar] [CrossRef]
- Sadraey, M.H. Design of Unmanned Aerial Systems; Aerospace series; John Wiley & Sons: Hoboken, NJ, USA, 2020; ISBN 978-1-119-50862-5. [Google Scholar]
- Ryapolov, I.; Sukharevsky, O.; Vasilets, V. Radar Cross-Section Calculation for Unmanned Aerial Vehicle. In Proceedings of the 2014 International Conference on Mathematical Methods in Electromagnetic Theory, Dnipropetrovsk, Ukraine, 26–28 August 2014; pp. 258–261. [Google Scholar]
- Gong, J.; Li, D.; Yan, J.; Hu, H.; Kong, D. Comparison of Radar Signatures from a Hybrid VTOL Fixed-Wing Drone and Quad-Rotor Drone. Drones 2022, 6, 110. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X.-S.; Xiao, S.-P.; Li, Y.-Z.; Shi, L.-F. Experimental Analysis of Fully Polarimetric Radar Cross Section of Fixed-Wing UAV. In Proceedings of the 2019 PhotonIcs & Electromagnetics Research Symposium-Spring (PIERS-Spring), Rome, Italy, 17–20 June 2019; pp. 1354–1358. [Google Scholar]
- Sedivy, P.; Nemec, O. Drone RCS Statistical Behaviour. In Proceedings of the MSG-SET-183 Specialists’ Meeting on “Drone Detectability: Modelling the Relevant Signature”, North Atlantic Treaty Organization (NATO), Held Virtually (via WebEx), 27 April 2021; pp. 4-1–4-18. [Google Scholar]
- Skolnik, M.I. (Ed.) Radar Handbook, 3rd ed.; McGraw-Hill: New York, NY, USA, 2008; ISBN 978-0-07-148547-0. [Google Scholar]
- Fourikis, N. Advanced Array Systems, Applications and RF Technologies; Signal Processing and Its Applications; Academic Press: San Diego, CA, USA, 2000; ISBN 978-0-12-262942-6. [Google Scholar]
- Leung, S.; Liang, C.; Tao, X.; Li, F.; Poo, Y.; Wu, R. Broadband Radar Cross Section Reduction by an Absorptive Metasurface Based on a Magnetic Absorbing Material. Opt. Express 2021, 29, 33536. [Google Scholar] [CrossRef]
- Yue, K.; Chen, S.; Shu, C. Calculation of Aircraft Target’s Single-Pulse Detection Probability. J.Aerosp. Technol. Manag. 2015, 7, 314–322. [Google Scholar] [CrossRef]
- Ezuma, M.; Ozdemir, O.; Anjinappa, C.K.; Gulzar, W.A.; Guvenc, I. Micro-UAV Detection with a Low-Grazing Angle Millimeter Wave Radar. In Proceedings of the 2019 IEEE Radio and Wireless Symposium (RWS), Orlando, FL, USA, 20–23 January 2019; pp. 1–4. [Google Scholar]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors 2020, 20, 4172. [Google Scholar] [CrossRef] [PubMed]
- Fu, R.; Al-Absi, M.A.; Kim, K.-H.; Lee, Y.-S.; Al-Absi, A.A.; Lee, H.-J. Deep Learning-Based Drone Classification Using Radar Cross Section Signatures at MmWave Frequencies. IEEE Access 2021, 9, 161431–161444. [Google Scholar] [CrossRef]
- Sayed, A.N.; Riad, M.M.Y.R.; Ramahi, O.M.; Shaker, G. UAV Classification Using Neural Networks and CAD-Generated Radar Datasets. TechRxiv 2022. [Google Scholar] [CrossRef]
- De Wit, J.J.M.; Gusland, D.; Trommel, R.P. Radar Measurements for the Assessment of Features for Drone Characterization. In Proceedings of the 2020 17th European Radar Conference (EuRAD), Utrecht, The Netherlands, 10 January 2021; pp. 38–41. [Google Scholar]
- Ye, L.; Hu, S.; Yan, T.; Xie, Y. GAF Representation of Millimeter Wave Drone RCS and Drone Classification Method Based On Deep Fusion Network Using ResNet. In IEEE Transactions on Aerospace and Electronic Systems; IEEE: New York, NY, USA, 2022; pp. 1–11. [Google Scholar] [CrossRef]
- Raval, D.; Hunter, E.; Hudson, S.; Damini, A.; Balaji, B. Convolutional Neural Networks for Classification of Drones Using Radars. Drones 2021, 5, 149. [Google Scholar] [CrossRef]
- Roychowdhury, S.; Ghosh, D. Machine Learning Based Classification of Radar Signatures of Drones. In Proceedings of the 2021 2nd International Conference on Range Technology (ICORT), Balasore, India, 5 August 2021; pp. 1–5. [Google Scholar]
- Dale, H.; Baker, C.; Antoniou, M.; Jahangir, M.; Atkinson, G.; Harman, S. SNR-dependent Drone Classification Using Convolutional Neural Networks. IET Radar Sonar Navi 2022, 16, 22–33. [Google Scholar] [CrossRef]
- Ciattaglia, G.; Senigagliesi, L.; Alidori, D.; Cipriani, L.; Iadarola, G.; Spinsante, S.; Gambi, E. Drone Classification Using MmWave Micro-Doppler Radar Measurements. In Proceedings of the 2022 IEEE 9th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 27 June 2022; pp. 259–264. [Google Scholar]
- Blake, W.; Burger, I. Small Drone Detection Using Airborne Weather Radar. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7 May 2021; pp. 1–4. [Google Scholar]
- Semkin, V.; Haarla, J.; Pairon, T.; Slezak, C.; Rangan, S.; Viikari, V.; Oestges, C. Analyzing Radar Cross Section Signatures of Diverse Drone Models at MmWave Frequencies. IEEE Access 2020, 8, 48958–48969. [Google Scholar] [CrossRef]
- Morris, P.J.B.; Hari, K.V.S. Detection and Localization of Unmanned Aircraft Systems Using Millimeter-Wave Automotive Radar Sensors. IEEE Sens. Lett. 2021, 5, 1–4. [Google Scholar] [CrossRef]
- Sun, M.; Guo, Z.; Li, M.; Gerdes, R. Passive Drone Localization Using LTE Signals. In Proceedings of the 15th ACM Conference on Security and Privacy in Wireless and Mobile Networks, San Antonio, TX, USA, 16 May 2022; pp. 295–297. [Google Scholar]
- Rudys, S.; Ragulis, P.; Laučys, A.; Bručas, D.; Pomarnacki, R.; Plonis, D. Investigation of UAV Detection by Different Solid-State Marine Radars. Electronics 2022, 11, 2502. [Google Scholar] [CrossRef]
- Li, Y.; Wei, X.; Li, Y.; Dong, Z.; Shahidehpour, M. Detection of False Data Injection Attacks in Smart Grid: A Secure Federated Deep Learning Approach. IEEE Trans. Smart Grid 2022, 13, 4862–4872. [Google Scholar] [CrossRef]
- Dadrass Javan, F.; Samadzadegan, F.; Gholamshahi, M.; Ashatari Mahini, F. A Modified YOLOv4 Deep Learning Network for Vision-Based UAV Recognition. Drones 2022, 6, 160. [Google Scholar] [CrossRef]
- Toma, C.; Popa, M.; Iancu, B.; Doinea, M.; Pascu, A.; Ioan-Dutescu, F. Edge Machine Learning for the Automated Decision and Visual Computing of the Robots, IoT Embedded Devices or UAV-Drones. Electronics 2022, 11, 3507. [Google Scholar] [CrossRef]
- Tran, T.L.C.; Huang, Z.-C.; Tseng, K.-H.; Chou, P.-H. Detection of Bottle Marine Debris Using Unmanned Aerial Vehicles and Machine Learning Techniques. Drones 2022, 6, 401. [Google Scholar] [CrossRef]
- Heidari, A.; Jabraeil Jamali, M.A. Internet of Things Intrusion Detection Systems: A Comprehensive Review and Future Directions. Clust. Comput 2022, 1–28. [Google Scholar] [CrossRef]
- Heidari, A.; Navimipour, N.J.; Unal, M.; Zhang, G. Machine Learning Applications in Internet-of-Drones: Systematic Review, Recent Deployments, and Open Issues. ACM Comput. Surv. 2022, 3571728. [Google Scholar] [CrossRef]
- Systems, R.R. Drone Detection Radar|ELVIRA|Robin Radar. Available online: https://www.robinradar.com/elvira-datasheet (accessed on 29 August 2022).
- Patel, J.S.; Fioranelli, F.; Anderson, D. Review of Radar Classification and RCS Characterisation Techniques for Small UAVs or Drones. IET Radar Sonar Amp Navig. 2018, 12, 911–919. [Google Scholar] [CrossRef]
- Ezuma, M.; Funderburk, M.; Guvenc, I. Compact-Range RCS Measurements and Modeling of Small Drones at 15 GHz and 25 GHz. In Proceedings of the 2020 IEEE Radio and Wireless Symposium (RWS), San Antonio, TX, USA, 26–29 January 2020. [Google Scholar]
- Salim, I.M.; Barbary, M.; Abd El-azeem, M.H. Novel Bayesian Track-Before-Detection for Drones Based VB-Multi-Bernoulli Filter and a GIGM Implementation. Radioengineering 2020, 29, 397–404. [Google Scholar] [CrossRef]
- Ruiz-Perez, F.; López-Estrada, S.M.; Tolentino-Hernández, R.V.; Caballero-Briones, F. Carbon-Based Radar Absorbing Materials: A Critical Review. J. Sci. Adv. Mater. Devices 2022, 7, 100454. [Google Scholar] [CrossRef]
- Kapoulas, I.K.; Statharas, J.C.; Hatziefremidis, A.; Baldoukas, A.K. Fast Airfoil Selection Methodology for Small Unmanned Aerial Vehicles. Appl. Sci. 2022, 12, 9328. [Google Scholar] [CrossRef]
- Garrido, E.; Jenn, D. A MATLAB Physical Optics RCS Prediction Code. ACES Newsl. 2000, 15, 7–12. [Google Scholar]
- Jenn, D.C. Radar and Laser Cross Section Engineering, 2nd ed.; AIAA Education Series; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2005; ISBN 978-1-56347-702-7. [Google Scholar]
- Jenn, D. POFACETS4.1. Available online: https://www.mathworks.com/matlabcentral/fileexchange/35861-pofacets4-1 (accessed on 16 September 2022).
- Barbosa, U.F.; Cruvinelda Costa, J.P.M.; Munjulury, R.C.; Abdalla, A.M. Analysis of Radar Cross Section and Wave Drag Reduction of Fighter Aircraft. In Proceedings of the Aerospace Technology Congress 2016, Solna, Stockholm, 11–12 October 2016; Volume 1. [Google Scholar]
- Bravo-Mosquera, P.D.; Abdalla, A.M.; Catalano, F.M. Evaluation of Delta Wing Effects on the Stealth-Aerodynamic Features for Non-Conventional Fighter Aircraft. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences, Belo Horizonte, Brazil, 9 September 2018; Volume 1. [Google Scholar]
- Li, M.; Bai, J.; Li, L.; Meng, X.; Liu, Q.; Chen, B. A Gradient-Based Aero-Stealth Optimization Design Method for Flying Wing Aircraft. Aerosp. Sci. Technol. 2019, 92, 156–169. [Google Scholar] [CrossRef]
- Papageorgiou, A.; Amadori, K.; Jouannet, C.; Ölvander, J. Multidisciplinary Optimization of Unmanned Aircraft in A System of Systems Context. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences, Belo Horizonte, Brazil, 9 September 2018; Volume 1. [Google Scholar]
- Touzopoulos, P.; Boviatsis, D.; Zikidis, K. 3D Modelling of Potential Targets for the Purpose of Radar Cross Section (RCS) Prediction. In Proceedings of the 2017 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 31 June 2017; Volume 1. [Google Scholar]
- Touzopoulos, P.; Zikidis, K.C. Physical Optics Radar Cross Section Predictions for an Anti-Ship Cruise Missile. J. Def. Model. Simul. 2021, 154851292110330. [Google Scholar] [CrossRef]
- Woollard, M.; Blacknell, D.; Griffiths, H.; Ritchie, M.A. SARCASTIC v2.0—High-Performance SAR Simulation for Next-Generation ATR Systems. Remote Sens. 2022, 14, 2561. [Google Scholar] [CrossRef]
- Amir, H.; Maresca, S.; Serafino, G.; Ghelfi, P.; Bogoni, A. Modelling of Extended Targets with Dual-Band MIMO Radar Networks. In Proceedings of the 18th European Radar Conference (EuRAD)/European Microwave Week (EuMW), London, UK, 5 April 2022; Volume 1. [Google Scholar]
- Yang, F.; Xu, F.; Fioranelli, F.; Le Kernec, J.; Chang, S.; Long, T. Practical Investigation of a MIMO Radar System Capabilities for Small Drones Detection. IET Radar Sonar Navig. 2021, 15, 760–774. [Google Scholar] [CrossRef]
- MeshLab. Available online: https://www.meshlab.net/#download (accessed on 14 September 2022).
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. MeshLab: An Open-Source Mesh Processing Tool. Eurographics Ital. Chapter Conf. 2008, 2008, 129–136. [Google Scholar] [CrossRef]
- Wang, Z.; Tamijani, A.Y. Computational Synthesis of Large-Scale Three-Dimensional Heterogeneous Lattice Structures. Aerosp. Sci. Technol. 2022, 120, 107258. [Google Scholar] [CrossRef]
- Ceruti, A.; Gambacorta, D.; Marzocca, P. Unconventional Hybrid Airships Design Optimization Accounting for Added Masses. Aerosp. Sci. Technol. 2018, 72, 164–173. [Google Scholar] [CrossRef]
- Chen, G.; Yang, J.; Sergeev, A.; Wang, M.; Wei, C.; Yeh, J.; Morris, P.J.; Fournier, N.J.; Chen, Y.; Cheng, X.; et al. Coupled Crash Mechanics and Biomechanics of Aircraft Structures and Passengers. Commun. Nonlinear Sci. Numer. Simul. 2021, 101, 105850. [Google Scholar] [CrossRef]
- Das, S.; Kumar, U. Modeling of Bi-Polar Leader Inception and Propagation from Flying Aircraft Prior to a Lightning Strike. Atmosphere 2022, 13, 943. [Google Scholar] [CrossRef]
- DJI INSPIRE PRO|3D CAD Model Library|GrabCAD. Available online: https://grabcad.com/library/dji-inspire-pro-1 (accessed on 14 September 2022).
- How Can Models Be Used and Shared?—GrabCAD Help Center. Available online: https://help.grabcad.com/article/246-how-can-models-be-used-and-shared?locale=en (accessed on 14 September 2022).
- DJI Inspire 1 Propeller|3D CAD Model Library|GrabCAD. Available online: https://grabcad.com/library/dji-inspire-1-propeller-1 (accessed on 14 September 2022).
- Inspire 2-Features-DJI. Available online: https://www.dji.com/gr/inspire-2/features (accessed on 3 August 2022).
- Inspire 1-Aircraft-DJI. Available online: https://www.dji.com/gr/inspire-1/aircraft (accessed on 3 August 2022).
- Mesquita, G.P.; Rodríguez-Teijeiro, J.D.; de Oliveira, R.R.; Mulero-Pázmány, M. Steps to Build a DIY Low-Cost Fixed-Wing Drone for Biodiversity Conservation. PLoS ONE 2021, 16, e0255559. [Google Scholar] [CrossRef]
- Friedlander, R.A.; Levie, H.S.; Musch, D.J.; Alexander, Y.; Lovelace, D.C. (Eds.) Terrorism: Commentary on Security Documents Volume 133: The Drone Wars of the 21st Century: Costs and Benefits, 1st ed.; Oceana Publications: Dobbs Ferry, NY, USA, 1979; Volume 133, ISBN 978-0-19-935104-6. [Google Scholar]
- Chen, L. (Ed.) Microwave Electronics: Measurement and Materials Characterisation; John Wiley: Chichester, UK, 2004; ISBN 978-0-470-84492-2. [Google Scholar]
- Krupka, J. Microwave Measurements of Electromagnetic Properties of Materials. Materials 2021, 14, 5097. [Google Scholar] [CrossRef] [PubMed]
- Chao, H.-W.; Chen, H.-H.; Chang, T.-H. Measuring the Complex Permittivities of Plastics in Irregular Shapes. Polymers 2021, 13, 2658. [Google Scholar] [CrossRef] [PubMed]
- Hegler, S.; Plettemeier, D. Simulative Investigation of the Radar Cross Section of Wind Turbines. Appl. Sci. 2019, 9, 4024. [Google Scholar] [CrossRef] [Green Version]
- Sykora, J. Additive Manufacturing of Unmanned Aerial Vehicle. In DAAAM Proceedings; Katalinic, B., Ed.; DAAAM International: Vienna, Austria, 2020; Volume 1, pp. 0836–0841. ISBN 978-3-902734-29-7. [Google Scholar]
- Behzadnezhad, B.; Collick, B.D.; Behdad, N.; McMillan, A.B. Dielectric Properties of 3D-Printed Materials for Anatomy Specific 3D-Printed MRI Coils. J. Magn. Reson. 2018, 289, 113–121. [Google Scholar] [CrossRef] [PubMed]
- Alves, M.A.; Peixoto, G.G.; Rezende, M.C. Simulations of the Radar Cross Section of a Generic Air-to-Air Missile Coated with Radar Absorbing Materials. In Proceedings of the 2007 SBMO/IEEE MTT-S International Microwave and Optoelectronics Conference, Salvador, Brazil, 29 October–1 November 2007; pp. 603–606. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wingspan (m) | UAV Special Attributes | Reference |
|---|---|---|
| 21.6 | Flying wing | [17] |
| 14.73 | Inverted V-Tail | [18] |
| 8.7 | Twin Vertical Tail (Boom Mounted [19]) | [20] |
| 3.6 | V-Tail and Vertical Take-Off and Landing (VTOL) | [21] |
| 2.9 | Twin Vertical Tail (Boom Mounted [19]) | [22] |
| 2.1 | Conventional, Tractor Engine | [23] |
| Aircraft Type | RCS Estimation (m2) | RCS Estimation (dBsm) |
|---|---|---|
| B52 | 100 | 20.00 |
| Blackjack (Tu-160) | 15 | 11.76 |
| FB-111 | 7 | 8.45 |
| F-4 | 6 | 7.78 |
| Mig-21 | 4 | 6.02 |
| Su-27 | 3 | 4.77 |
| Rafale-D | 2 | 3.01 |
| B1-B | 0.75 | −1.25 |
| B-2 | 0.1 | −10.00 |
| F-117A | 0.025 | −16.02 |
| Bird | 0.01 | −20.00 |
| Brand | Model | Frequency band | Frequencies (GHz) | DJI Drone classification distance | Power draw (W) | Transmitted power (W) | Elevation coverage | ||
| Inspire (3 kg) | Phantom (1 kg) | Mavic Mini (<249 g) | |||||||
| Robin radar systems | ELVIRA | X | 8.7 to 9.65 | 1.6 km to 1.8 km | 1.2 km to 1.5 km | 0.4 km to 0.6 km | 70 to 150 | 4 | 10° (−5° to + 17°, adjustable) |
| Multicopter Type | RCS (dBsm) | Frequency (GHz) | Reference |
|---|---|---|---|
| 3DR Solo | −14.1 | 12–15 | [50] |
| DJI Inspire 1 | −14.24 | 15–25 | [51] |
| Trimble ZX5 | −14.39 | 15–25 | [51] |
| DJI Inspire 1 | −15 | 18–27 | [52] |
| Cheerson-CX-20 | −16 | 9 | [50] |
| DJI F450 | −17 | 5.8–8.2 | [50] |
| DJI Phantom 3 | −20 | 18–27 | [52] |
| Parrot AR | −20.9 | 8.5 | [50] |
| UAV | Main structural parts | Material |
| DJI Inspire 1 | Shell | Plastic [76] |
| Arms | Carbon fiber [77] | |
| Euclid | Fuselage (front) | PLA (PolyLactic Acid) [54] |
| Fuselage (aft) | Carbon fiber [54] | |
| Wing and empennage | PLA (PolyLactic Acid) [54] | |
| Volantex Ranger | Fuselage | Plastic [78] |
| Wing and empennage | EPO (Expanded PolyOlefin) [78] | |
| RQ-11 Raven | Fuselage and wings | Kevlar [79] |
| Material | Remarks | Relative Permittivity () | Loss Tangent ( ) |
|---|---|---|---|
| Plastic | Electrical property range cited from [82] for the following widely used plastics: High Density PolyEthylene (HDPE), Linear Low Density PolyEthylene (LLDPE), Low Density PolyEthylene (LDPE), PolyPropylene (PP), Nylon, ThermoPlastic Vulcanizates (TPV). | 2.09–3.11 | 0.0005–0.0665 |
| Carbon fiber and Kevlar | values cited from [83], where a similar RCS study was performed on wind turbines’ unwanted interference with radar. All these synthetic materials treated as Fiber-Reinforced Plastics (FRP) or Carbon-Reinforced Plastics (CRP). | 4.35 | 0.05 |
| PLA (PolyLactic Acid) | A common material used in 3D printers. LightWeight PLA (LW-PLA) is also a commercial name of a PLA type with lower density of the standard PLA, used in Radio Controlled (RC) applications [84]. Electrical property range for PLA cited from [85]. | 2.1–3.549 | 0.008–0.013 |
| Scenario A | Scenario B | |
|---|---|---|
| θ, φ angles (degrees) | θ = 85°, φ = 0° to 360° with 1° step | θ = 85°, φ = 45° |
| Radar Frequencies (GHz) | First: 8.7; Second: 9.175; Third: 9.65 | 3 to 16 with 0.1 step |
| Radar type | Monostatic | |
| Target material electrical properties | = 3.7, = 0.0045 | |
| Incident Polarization | Theta (TM-z) | |
| Targets | Euclid UAV and DJI Inspire | |
| f = 8.7 Ghz | f = 9.175 Ghz | f = 9.65 Ghz | |
|---|---|---|---|
| DJI Inspire 1 | = −9.89 dBsm | = −10.06 dBsm | = −9.29 dBsm |
| Euclid UAV | = −16.96 dBsm | = −17.69 dBsm | = −18.21 dBsm |
| Mean RCS () for θ = 85° and f = 9.175 GHz (dBsm) | Mean RCS () ) for θ = 85° and f = 9.175 GHz (m2) | Detection Range (m) | Classification Range (m) | |
|---|---|---|---|---|
| DJI Inspire 1 | −10.06 | 0.098628 | 2768 | 1686 |
| Euclid UAV | −17.69 | 0.017021 | 1784 | 1087 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kapoulas, I.K.; Hatziefremidis, A.; Baldoukas, A.K.; Valamontes, E.S.; Statharas, J.C. Small Fixed-Wing UAV Radar Cross-Section Signature Investigation and Detection and Classification of Distance Estimation Using Realistic Parameters of a Commercial Anti-Drone System. Drones 2023, 7, 39. https://doi.org/10.3390/drones7010039
Kapoulas IK, Hatziefremidis A, Baldoukas AK, Valamontes ES, Statharas JC. Small Fixed-Wing UAV Radar Cross-Section Signature Investigation and Detection and Classification of Distance Estimation Using Realistic Parameters of a Commercial Anti-Drone System. Drones. 2023; 7(1):39. https://doi.org/10.3390/drones7010039
Chicago/Turabian StyleKapoulas, Ioannis K., Antonios Hatziefremidis, A. K. Baldoukas, Evangelos S. Valamontes, and J. C. Statharas. 2023. "Small Fixed-Wing UAV Radar Cross-Section Signature Investigation and Detection and Classification of Distance Estimation Using Realistic Parameters of a Commercial Anti-Drone System" Drones 7, no. 1: 39. https://doi.org/10.3390/drones7010039
APA StyleKapoulas, I. K., Hatziefremidis, A., Baldoukas, A. K., Valamontes, E. S., & Statharas, J. C. (2023). Small Fixed-Wing UAV Radar Cross-Section Signature Investigation and Detection and Classification of Distance Estimation Using Realistic Parameters of a Commercial Anti-Drone System. Drones, 7(1), 39. https://doi.org/10.3390/drones7010039