1. Introduction
The use of drones for operations in underground and surface mines has recently increased [
1,
2,
3]. In 2020, Shahmoradi et al. provided a broad review of the applications of drones in the mining industry. Their study presented configurations and specifications of available off-the-shelf drones for applications in the mining industry [
1]. Zimroz et al. investigated the possibility of applying drones in search and rescue missions in a deep underground mine [
4]. In their study, a drone searches for an injured or lost person who can call for help but cannot move or use any communication device [
4]. Jones et al. discussed using Hovermap autonomous flight systems in GPS-denied underground spaces [
5]. Drones can be incredibly adaptable when navigating challenging terrain and carrying various payloads. When LIDAR is used with simultaneous localization and mapping software (SLAM), the unit is a very affordable instrument for monitoring and decision-making [
6].
Shahmoradi et al. explored potential concepts for creating a fully autonomous enclosed drone to monitor the inaccessible parts of underground mines [
2]. Freire and Cota discussed image captures and the challenges of using drones in an underground mine inaccessible areas [
7]. Ilieva-Obretenova presented the management of a ground station and a drone for the aerial surveillance of subsurface processes [
8]. Mirzaeinia et al. explored algorithms to find the quickest and safest route for drone navigation systems in applications for underground mines [
9]. Li et al. outlined a technique for utilizing an autonomous flying robot to investigate and create a 3D map of a tunnel environment [
10]. Zimroz et al. described a method using drones to detect a specified acoustic pattern to assist rescue teams in determining the location of people inside an underground mine [
11]. Furthermore, Wang et al. studied the use of a truck–drone to expand the benefits of this hybrid system in underground coal mines [
12].
The Mine Safety and Health Administration (MSHA) has not set particular guidelines for flying vehicle testing and approval in underground mines. As a result, drones that will be used in underground mines should be designed and prototyped based on the general MSHA recommendations. These designs should satisfy the intrinsic safety-level requirements for hazardous-area classifications Class 1–Division 1 and Class 2–Division 1. It should be emphasized that creating intrinsically safe electrical components and an allowable power system must undergo a systematic feasibility analysis during the drone sizing process to ensure flyability.
Harsh conditions, such as reduced visibility, dust concentration, confined space, air velocity, and the lack of wireless communication systems, pose many obstacles for a flying drone in underground coal mines. Besides these challenges, due to the lack of an available intrinsically safe and permissible drone platform, MSHA prohibits using such a system. Moreover, coal dust and methane gas are other potential substances that can create fire hazards/explosion in underground coal mines. Therefore, it is required that the electrical components and battery must meet the MSHA’s permissibility/safety requirements defined in Title 30 of the Code of Federal Regulations and related criteria [
13]. MSHA currently provides details of the requirements for the mechanical, electrical, and general safety of mining products; however, these requirements for a flying machine are not yet developed.
Generally, the amount of intrinsic safety to be achieved is determined by standard and regulatory requirements. A permissible or inherently safe drone should not generate a spark in a coal mine, even through static discharge. The drone structure must be explosive-proof and capable of keeping the blast while ensuring that no flame, spark, or hot gases are released into the environment. The ability of drones to fly, hover, and navigate in confined spaces is influenced mainly by their size and weight. Encapsulating an inherently safe drone that can satisfy the MSHA’s requirements would add significant weight to the drone due to the added weight to the electrical components, including motors, Electrical Speed Controllers (ESCs), and batteries. Fortunately, material improvements have resulted in robust and lightweight materials for selection.
An intrinsically safe drone will be substantially heavier than a non-permissible or safe drone. Generally, the efficiency of flying vehicles like drones is dramatically affected by their weight [
14,
15]. As a result, the two key issues in creating an inherently safe drone platform for use in confined spaces are (1) demonstrating the vehicle’s intrinsic safety and permissibility and (2) designing a propulsion system that can generate enough thrust force and provide reasonable endurance. To this end, designing and prototyping a drone platform with suitable size and flight characteristics is challenging.
Currently, there is no data regarding drone design for underground coal mines; therefore, this paper presents an effort and contribution to designing an intrinsically safe drone. As there has been no previous effort in this area, any output from this study would be novel. The unique problems that appeared in the research and their solution should be an addition to the body of knowledge.
The rest of the paper is organized as follows: in
Section 2, the design strategy of an intrinsically safe multi-rotor drone and its propulsion system for underground mine applications are discussed. The experimental setup for propulsion system performance measurement and mechanical couplers are presented in
Section 3 and
Section 4, respectively.
Section 5 shows the thermal effects of the motor’s enclosure. The motor’s enclosure flow blockage and spinner design are indicated in
Section 6. The summary and conclusions are given in
Section 7.
2. Design Strategy of an Intrinsically Safe Drone
Sizing is one of the critical steps in the design process of different types of aerial vehicles, which results in the optimum values of their size and weights, and it consists of five steps [
16,
17,
18], including (1) mission definition, (2) flight modes, (3) configuration and shape, (4) weight estimation, and (5) propulsion system design [
19]. In the mission definition, initially, the needs analyses are carried out. Considering the drone’s permissibility, safety, durability, functionality, and objectives, the kinematic requirements, flight time, cruise speed, etc., will be determined. After that, flight modes (hovering and forward flights) and the shape of the drone are determined based on application requirements. Then, analyses are conducted to extract the flight’s kinematic and dynamic equations, which result in the appropriate thrust loading of the drone. In parallel, different weight estimation methods can be employed. The outcome of the sizing process will be the geometry and dimensions of an intrinsically safe drone and the calculation of aerodynamic parameters. The optimum weight and dimensions of the drone and the components of the propulsion system, such as the battery, motors, propellers, and ESCs, will be specified during the sizing process [
20]. In
Figure 1, the proposed sizing process for the mono/multi-rotor drone with applications in underground coal mines is shown.
Designing a propulsion system is one of the most challenging steps in the overall design process of an intrinsically safe/permissible drone. A propulsion system of a drone is made up of motors, propellers, and ESCs. The drone’s propellers are defined by three primary parameters: pitch, diameter, and blade number. Increasing the values of these parameters would generate higher values of thrust, resulting in higher torque on the motors. Generally, two-bladed, long, slowly spinning propellers in multirotors, compared to multibladed, compact, fast-spinning ones, are more aerodynamically efficient. Propeller properties are mainly determined by incoming air speed and rotating speed.
Furthermore, the mass and materials of the propellers are crucial factors that need to be taken into consideration during propeller selection or design. The motors of multirotor drones are the propellers’ driving force and can change speeds quickly. A brushless DC electric motor’s principal limits are speed and current. Although speed controllers (ESCs) play an essential part in multirotor drones, they play a lesser function in the propulsion chain concept. ESCs deliver current from the battery to the motor while maintaining a steady voltage. When constructing a multirotor drone, speed controllers must still be defined based on the maximum current flowing to the motors.
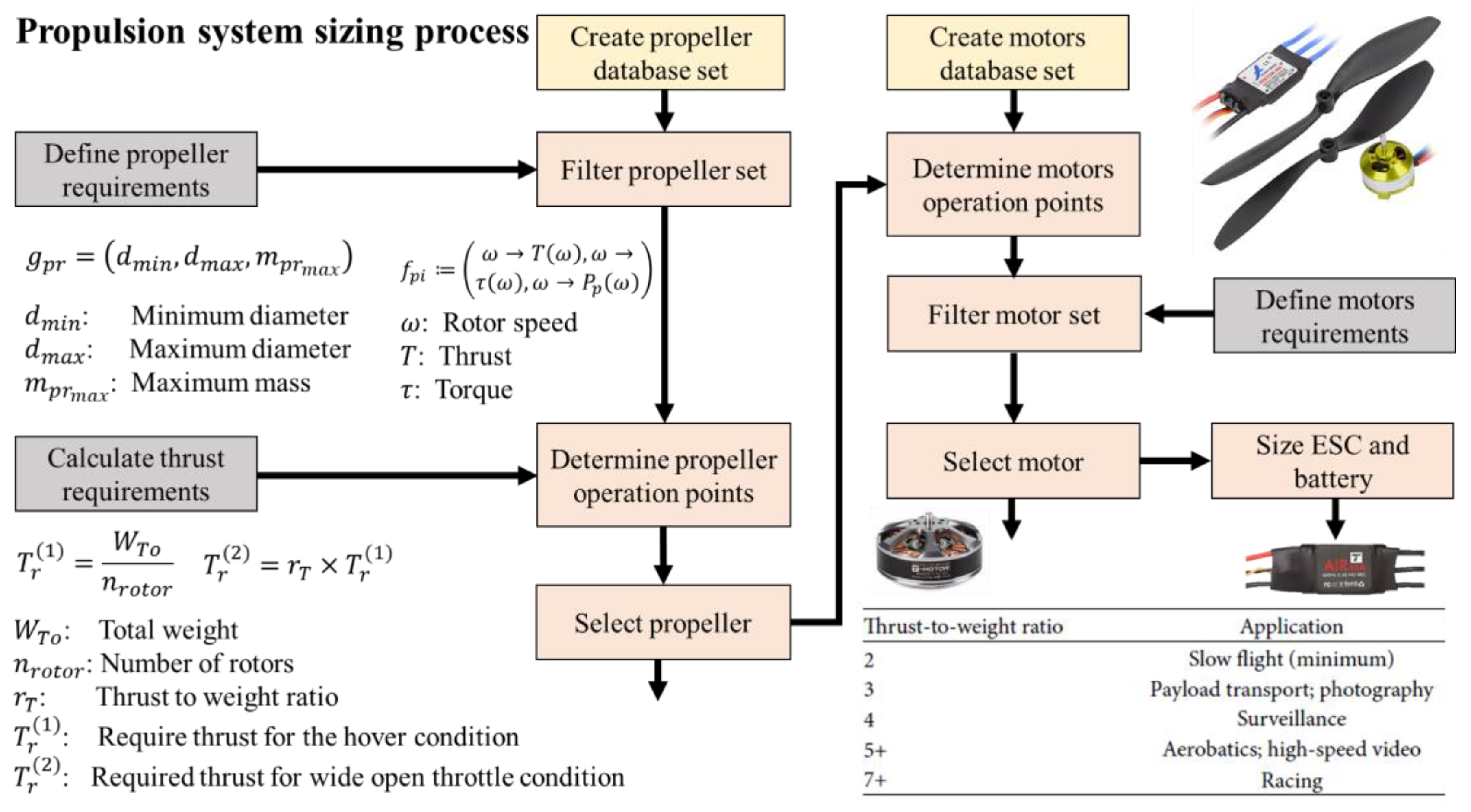
Figure 2 and
Figure 3 depict a view of the multirotor propulsion chain diagram and the multirotor propulsion system sizing approach, respectively.
Flight time and range are also important aspects in determining the effectiveness of a flying system which are determined by the defined mission and the drone’s design specifications [
21,
22,
23]. Analytical and empirical tests need to be carried out to specify the flight range and endurance and assess the propulsion system’s performance (i.e., battery, motors, propeller, and ESCs). The results of these analyses can be utilized to optimize and improve the system.
Figure 2.
Multirotor propulsion chain diagram [
24].
Figure 2.
Multirotor propulsion chain diagram [
24].
The propulsion system sizing methodology in
Figure 3 shows the sizing of the motors depends on the speed controller, propeller, and battery specifications.
Figure 3.
Propulsion system design methodology.
Figure 3.
Propulsion system design methodology.
The primary goal of this paper is to create an acceptable near-permissible (inherently safe) drone propulsion system that will allow the drone to fly in underground coal mines. The motors will be housed inside a composite-made casing with the same thickness as all drone sections in the basic design. The thickness is chosen to resist a 150 PSI explosive force. Consequently, this requirement will increase the drone’s overall weight, which, as mentioned above, is a critical parameter during the sizing process. Therefore, an alternative concept for lowering drone weight is being investigated. As shown in
Figure 4, the proposed approach divides the drone’s assembly into two portions. The red areas (motor and battery casing) have a greater armor thickness to withstand a 150 PSI explosion, while the green sections (connecting rods between the motor and battery casings) have a lower danger probability and are designed to manage propulsion system stresses due to torque and thrust. This proposed design will decrease the overall drone’s weight.
Figure 5 depicts the whole procedure, as well as the current state of the drone propulsion system design and performance data.
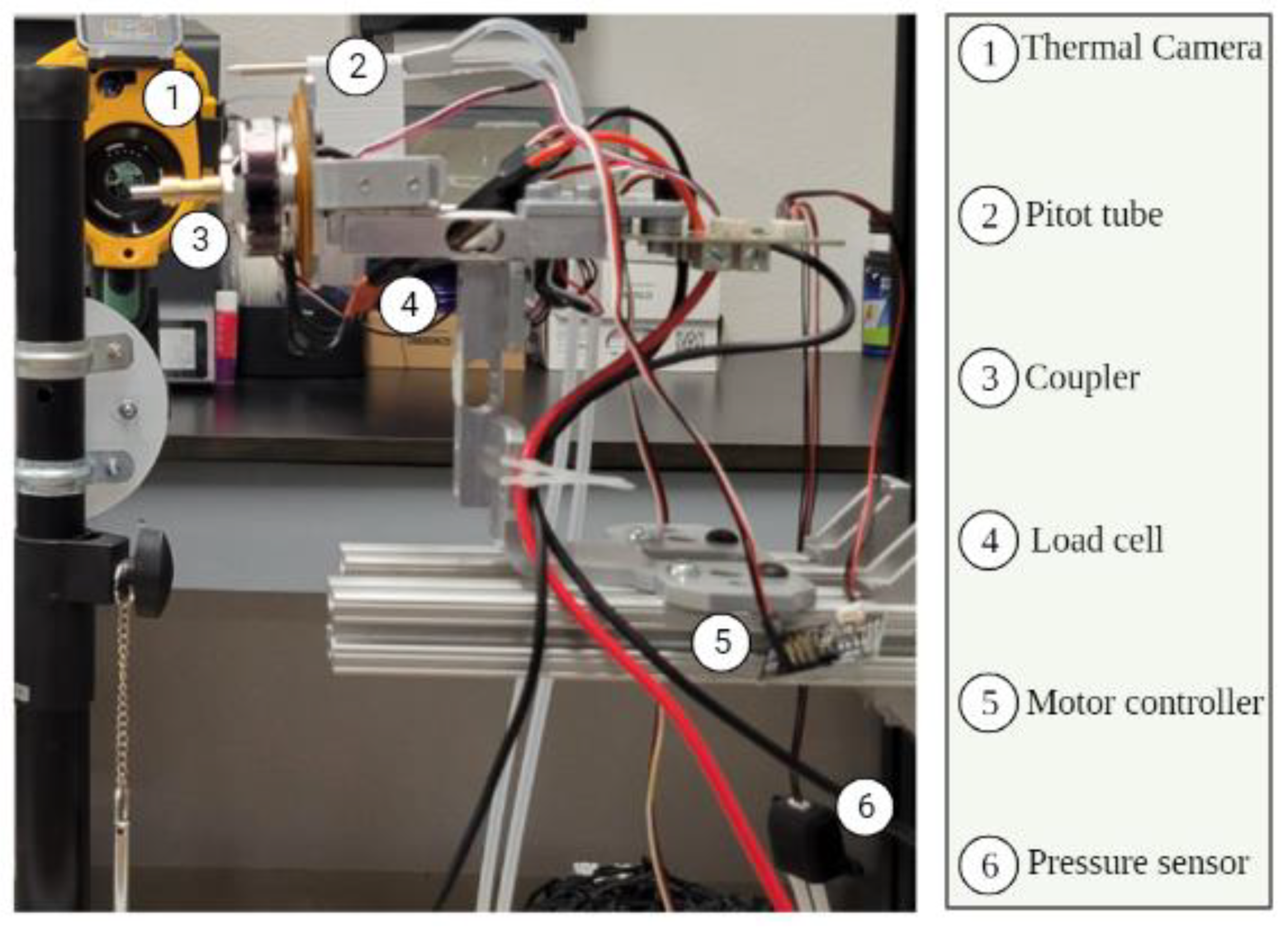
The current paper’s research began with the creation of a testing setup. A performance test rig for propulsion systems was built from scratch. The flow surrounding the drone propulsion system is visualized using a smoke generator and a laser generator. Furthermore, a thermal camera is utilized to visualize the thermal effect of the motor housing on the motor itself. After the trials are set up, the first research will look into the coupling effect on the propulsion system’s performance. After that, the thermal effects of the motor enclosure on the motor temperature and how this affects the motor’s temperature are investigated. In addition, a thermal problem solution is provided and evaluated. Finally, because the motor enclosure causes airflow obstruction, a motor spinner is created and tested experimentally.
A test rig to measure the propulsion system’s performance is designed and manufactured. With some additions to the test rig, it is possible to conduct flow visualization using a laser and smoke generator. Furthermore, applying a thermal camera makes it possible to capture the thermal images of the propulsion system. The measurement system was used to evaluate the coupling system of the propulsion system. Furthermore, the motor enclosure’s thermal and aerodynamic effect on the propulsion is investigated, which will be discussed in the following sections.
6. Motor Enclosure Flow Blockage and Spinner Design
A smoke-visualization setup that applies a fog generator and laser is made to visualize the flow around the propulsion system, as shown in
Figure 16. As can be seen, the flow is bent around the motor enclosure corner (the yellow circle), and that could reduce the system’s efficacy. To solve this problem, nine motor spinners, shown in
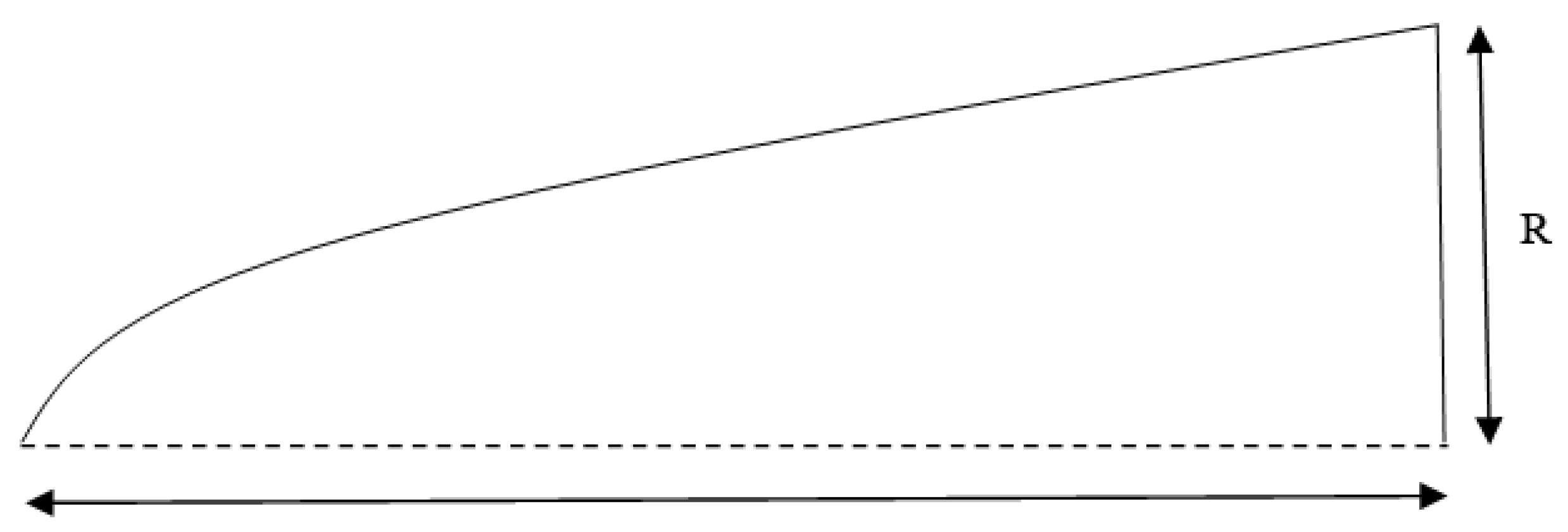
Figure 17, are designed and prototyped. The spinners are tested using the performance test rig, and the performance of each one of them is evaluated. The spinner weight should be taken into consideration; however, for the current research, only the aerodynamic effects are considered. The spinner geometry is shown in
Figure 18, and Equation (10) is used to design the spinner. In
Table 2, the summary of different spinner equations, which all have the same diameter with different lengths and curve equations, are shown.
Figure 19 compares the different spinners, and
Figure 20 shows the 3d-printed spinners.
A balancing system shown in
Figure 21 is used to balance the spinners before testing and reduce the operation vibration. Increasing the vibration could lead to breaking the motor’s shaft.
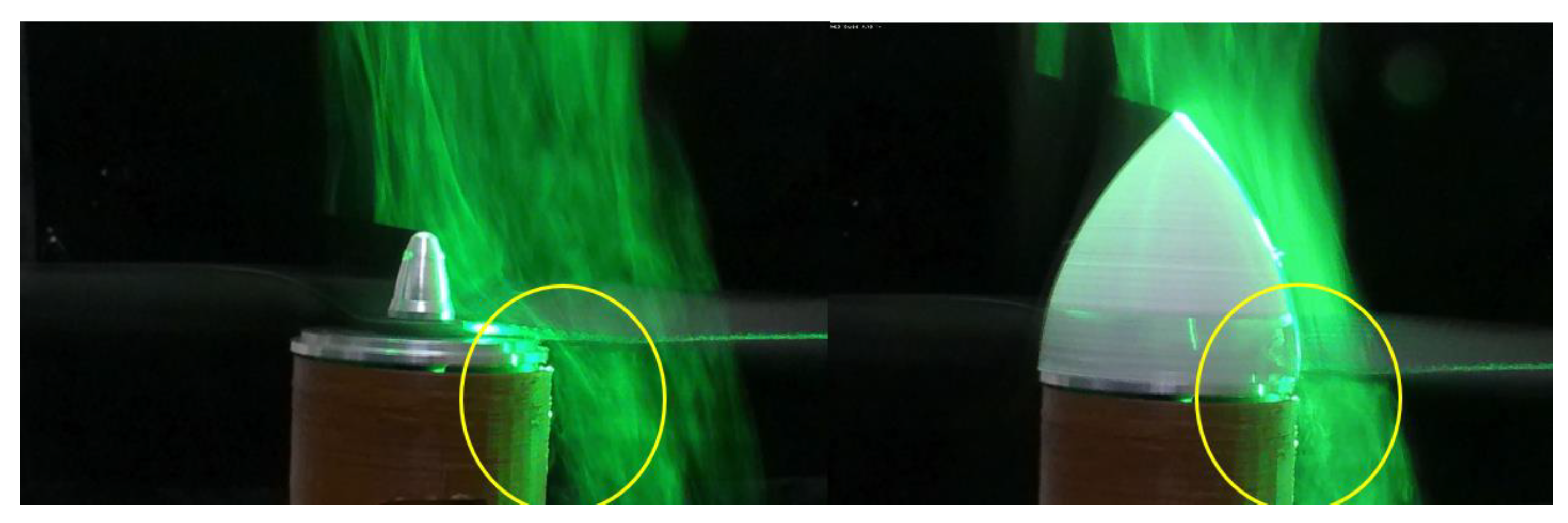
Figure 22 presents the difference in airflow between the casing without a spinner and the casing with a spinner case.
Each spinner is installed on the propeller, and the thrust from each of them is shown in
Figure 22. From the thrust perspective, the K3L2 is the best choice. For the torque case in
Figure 23, the difference is much smaller and will not considered in the selection. The slipstream velocity for K3L2 is the highest, as shown in
Figure 24. Furthermore, from a propeller-efficiency point of view, K3L2, as indicated in
Figure 25, has the highest efficiency. For the overall system efficiency, K3L1 is the highest, and K3L2 is in second place. Overall system efficiency for the different spinners is shown in
Figure 26. The vibration results in
Figure 27 indicate the success in balancing the spinners, but the spinners K2L1 need to be rebalanced if it will be used further, as it shows a higher level of vibration compared with the other spinners. Based on the previous analysis, K3L2 is selected.
The smoke-visualization experiment for the case with and without a spinner is shown in
Figure 28. As shown, the flow field with yellow is different in the two cases, especially the region with a yellow circle. Further measurements should be considered to evaluate the effect of these spinners on the thrust and torque. Moreover, the added weight should be taken into consideration.
7. Conclusions
Experimental research was done to determine a permissible drone propulsion mechanism. The motor shaft needs to be connected because the propeller will be outside the casing due to the motor being enclosed in a housing. A mechanical coupler with an extended shaft was designed. The torque might be successfully transmitted by this mechanical coupler. The performance of the propulsion system was tested under two different circumstances, one for the motor without a casing and the other for the motor with a casing. In contrast to the usual situation, when the propellers cool the motors down, the motor housing heats the motors. As a result, an experimental investigation and heat-sink calculation was carried out. The performance of the propulsion system was tested under two different circumstances, one for the motor without a casing and the other for the motor with a casing. The most important advantage of the heat sink is that it reduces motor temperature, which can boost thrust, torque, and efficiency. Based on the numerical calculations, the heat sink has a fin with a length of 15 mm.
During the experimental investigation, the motor was operated with two RPMs: 50% and 75%. With the help of the heat sink, the motor temperature could be reduced from 70 °C to 40 °C in the case of 50% RPM. In comparison, The motor’s temperature could be reduced from 120 °C to 70 °C in the case of 75% RPM. This improvement in cooling the motor could increase the thrust by about 5%. The most crucial benefit of the heat sink is the reduction in motor’s temperature, which can also increase thrust, torque, and efficiency. To visualize the flow surrounding the propulsion system, a smoke-visualization experiment was conducted. It was shown through this experiment that the flow is bent around the corner of the motor enclosure, and spinners were prototyped and experimentally tested to study this effect. Based on the experiment results, a spinner with a height-to-diameter ratio (L/D) equal to 3/2 should be used. The spinner could increase the thrust by 2.6%. The work described in this paper may lead to the development of a drone propulsion system suitable for use in underground coal mines. However, since numerous pieces were added to the system, additional optimization is required to decrease the increased weight of the drone and increase its durability.




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















































