
Preliminary Concept of Urban Air Mobility Traffic Rules

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature Review
3. Urban Air Mobility Traffic Rules Framework
3.1. Assumptions
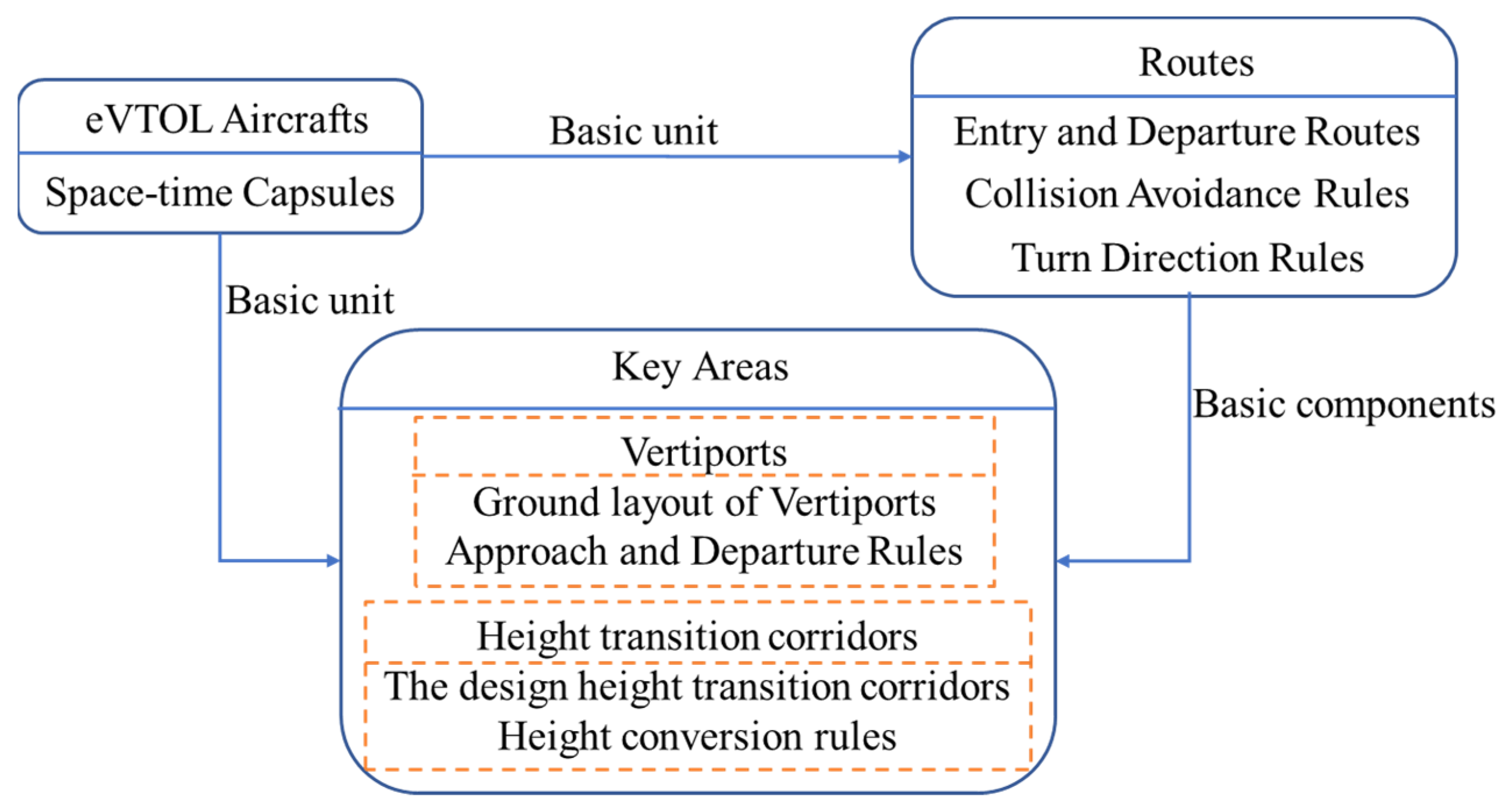
3.2. Analytical Framework
4. Urban Air Mobility Traffic Rules
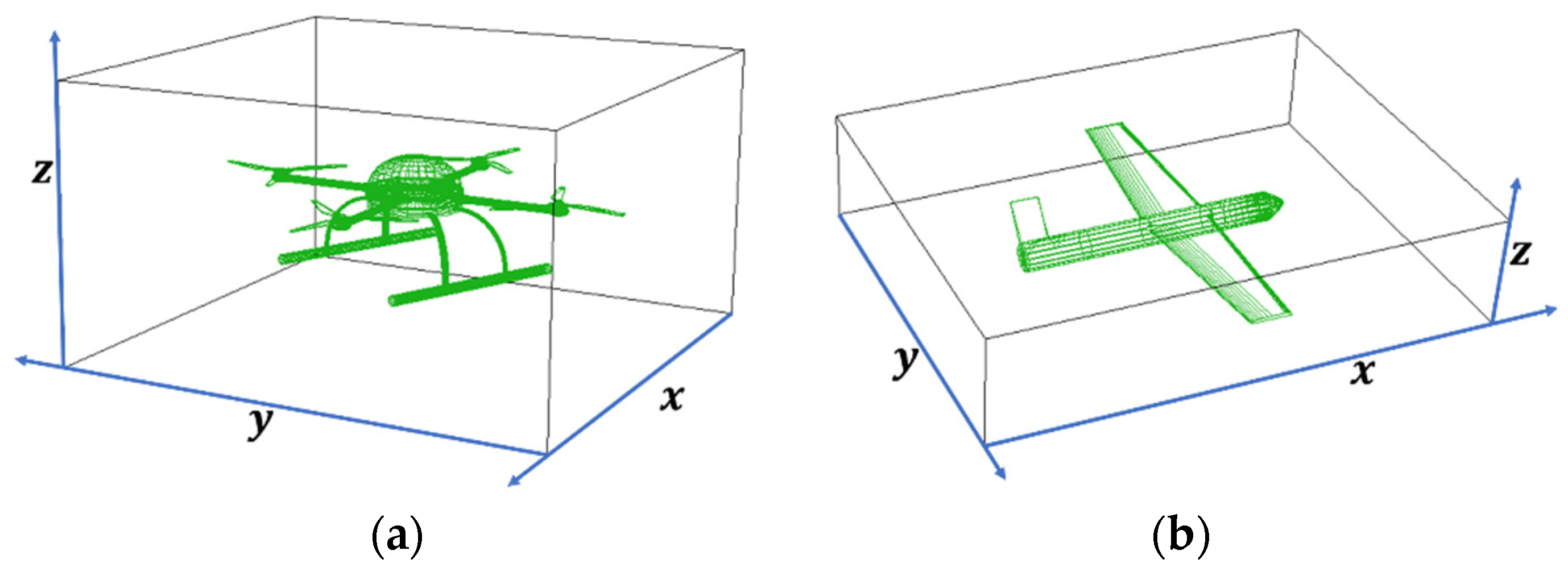
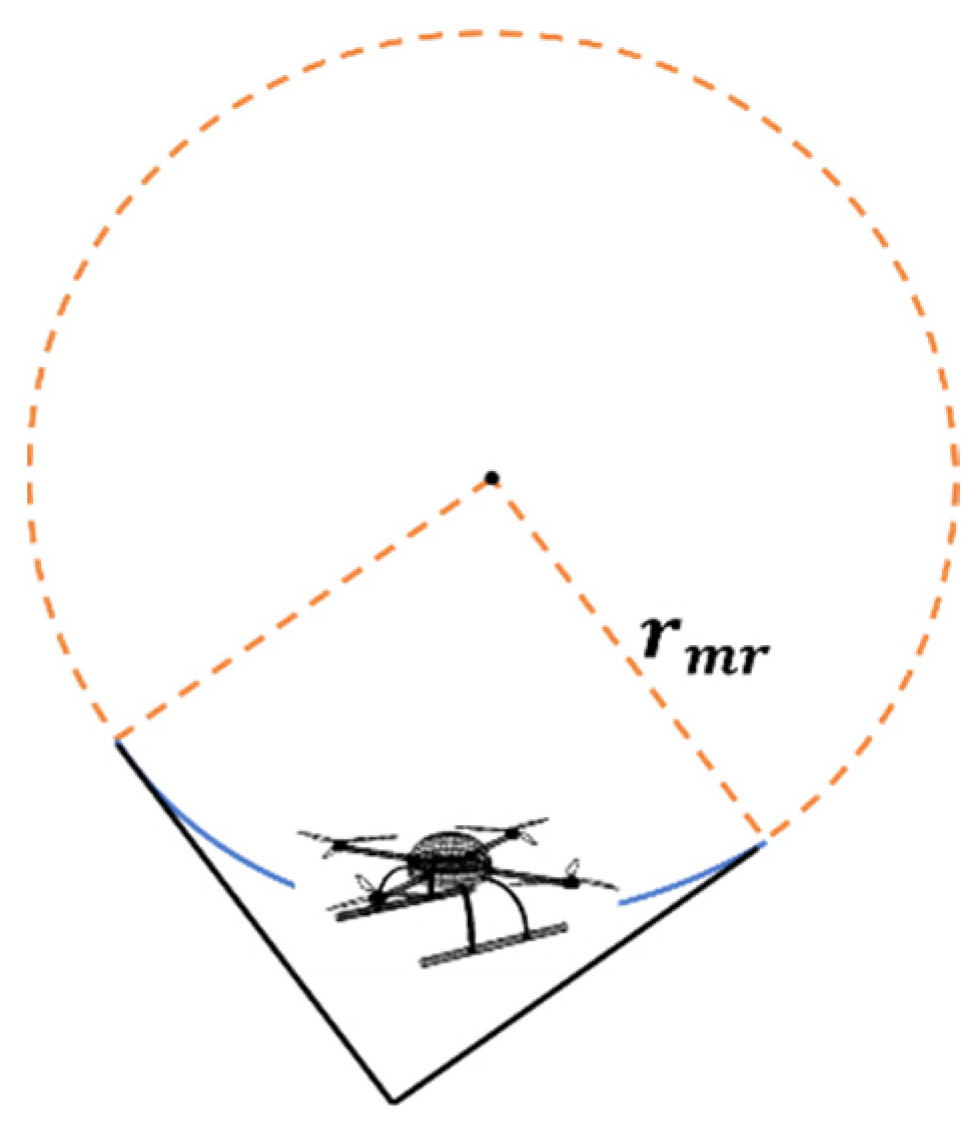
4.1. eVTOL Aircraft as “Space-Time Capsule”
4.1.1. Safety Distance in x-Axis Positive Direction
4.1.2. Safety Distance in x-Axis Opposite Direction
4.1.3. Safety Distance of y-Axis
4.1.4. Safety Distance of z-Axis
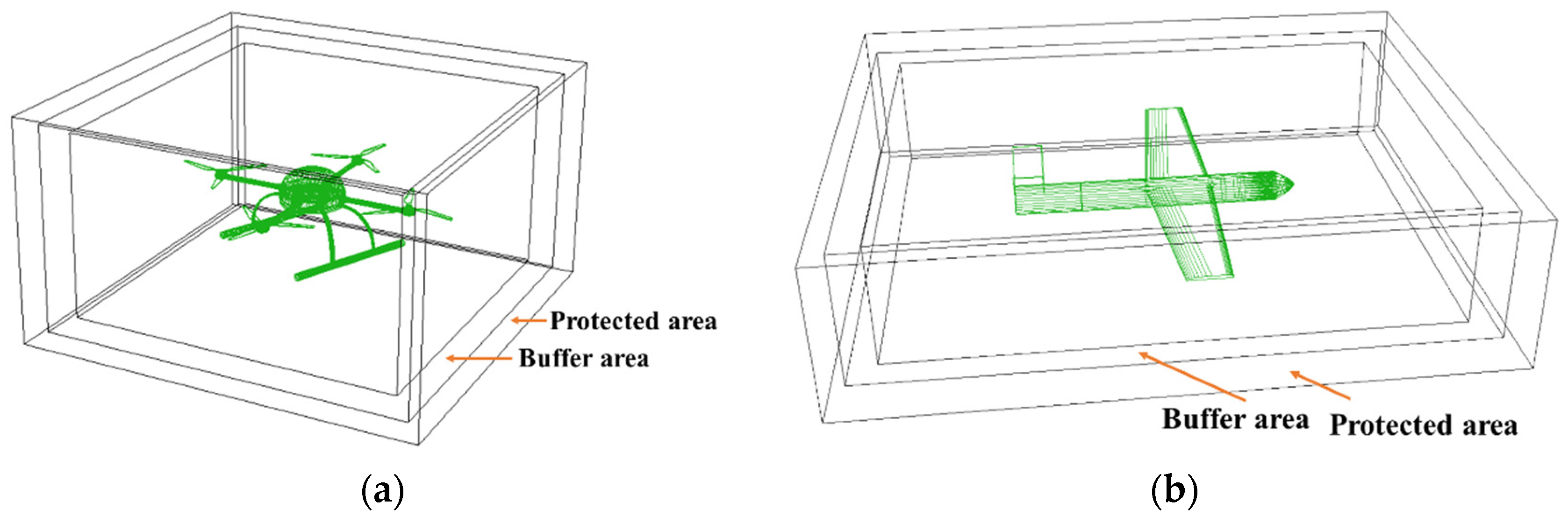
4.1.5. Design of Buffer and Protected Areas
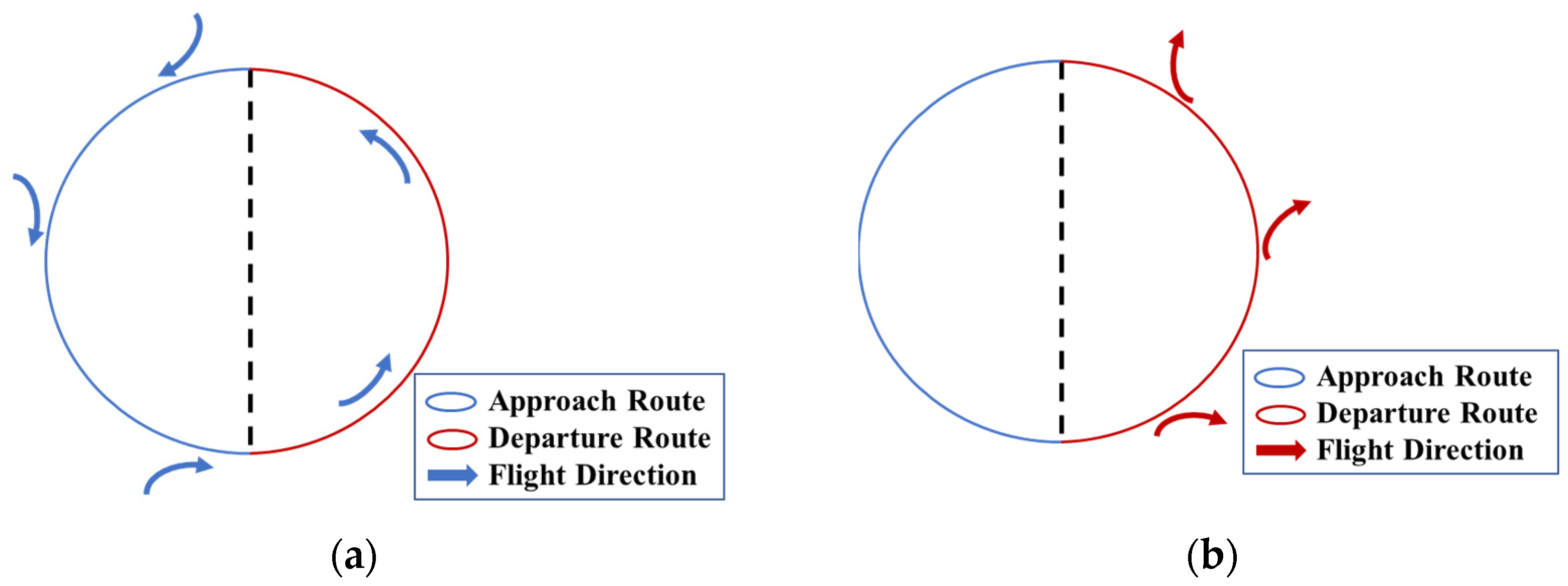
4.2. Route Traffic Rules
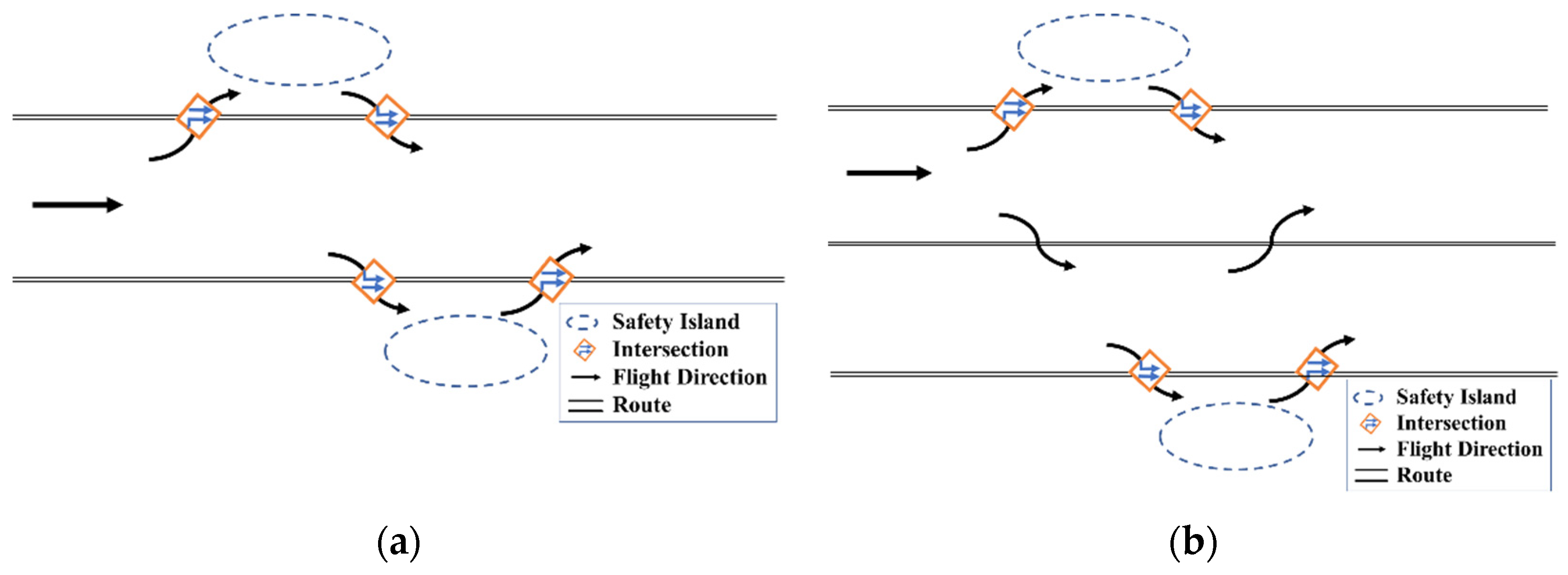
4.2.1. Entering and Leaving the Route Rules
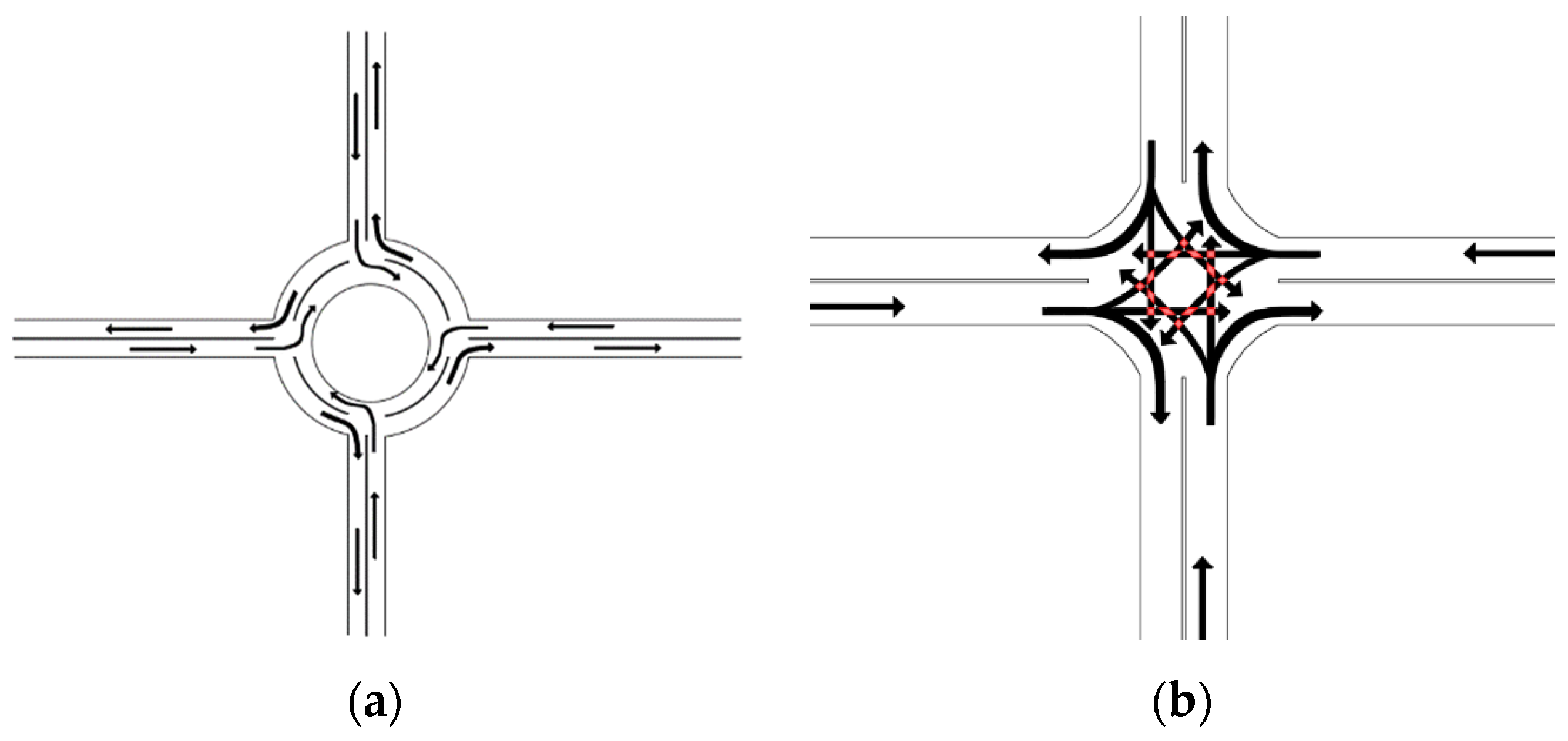
4.2.2. Collision Avoidance Rules
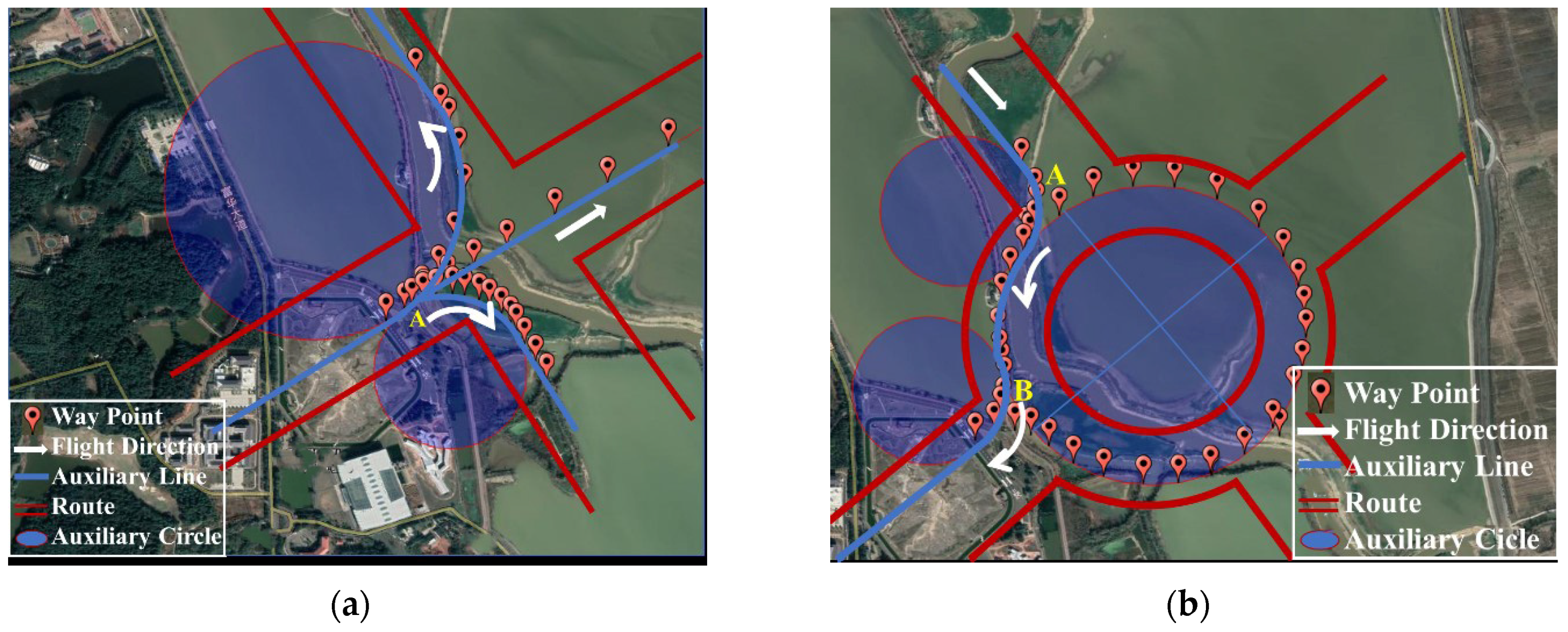
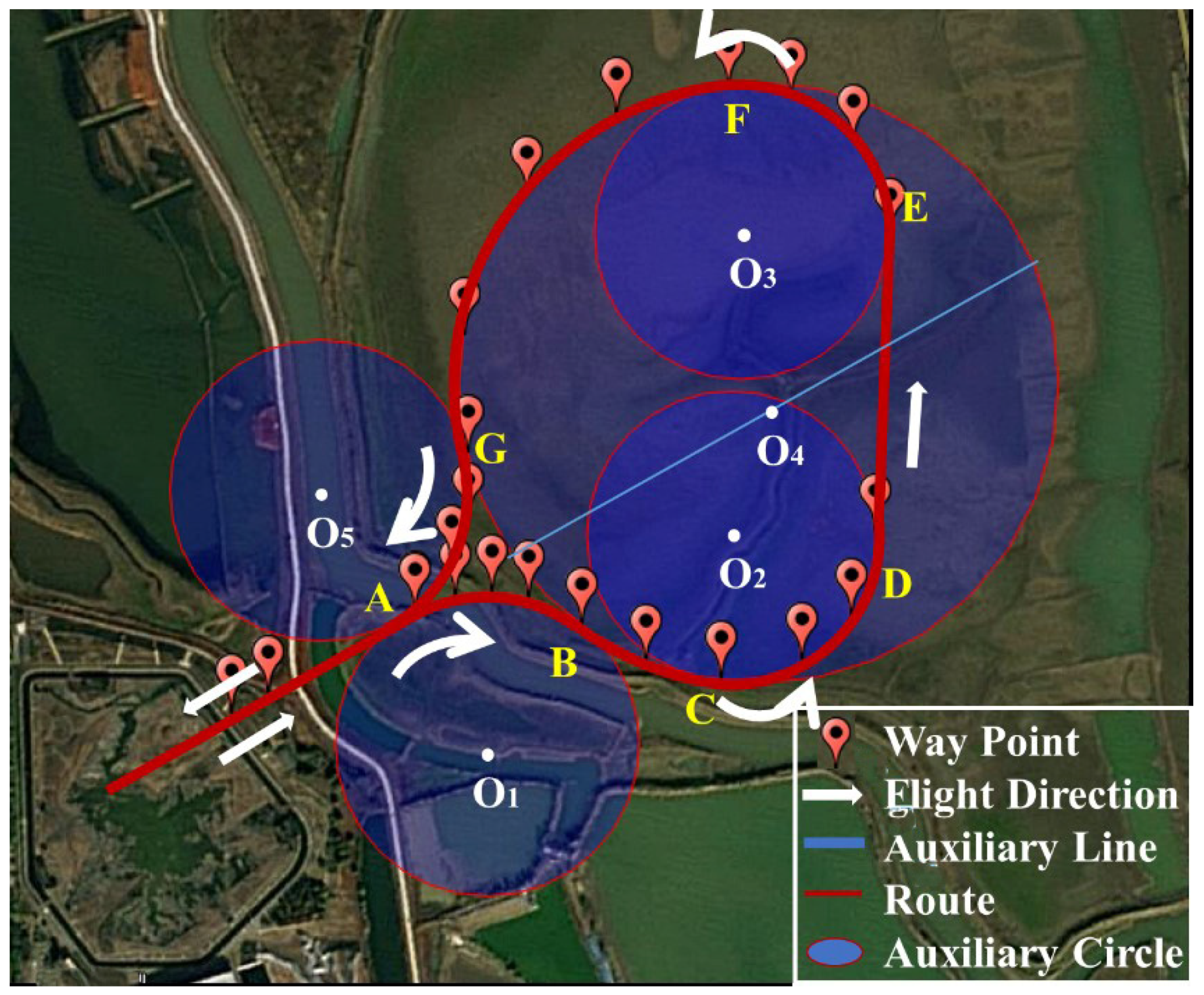
4.2.3. Turning Rules
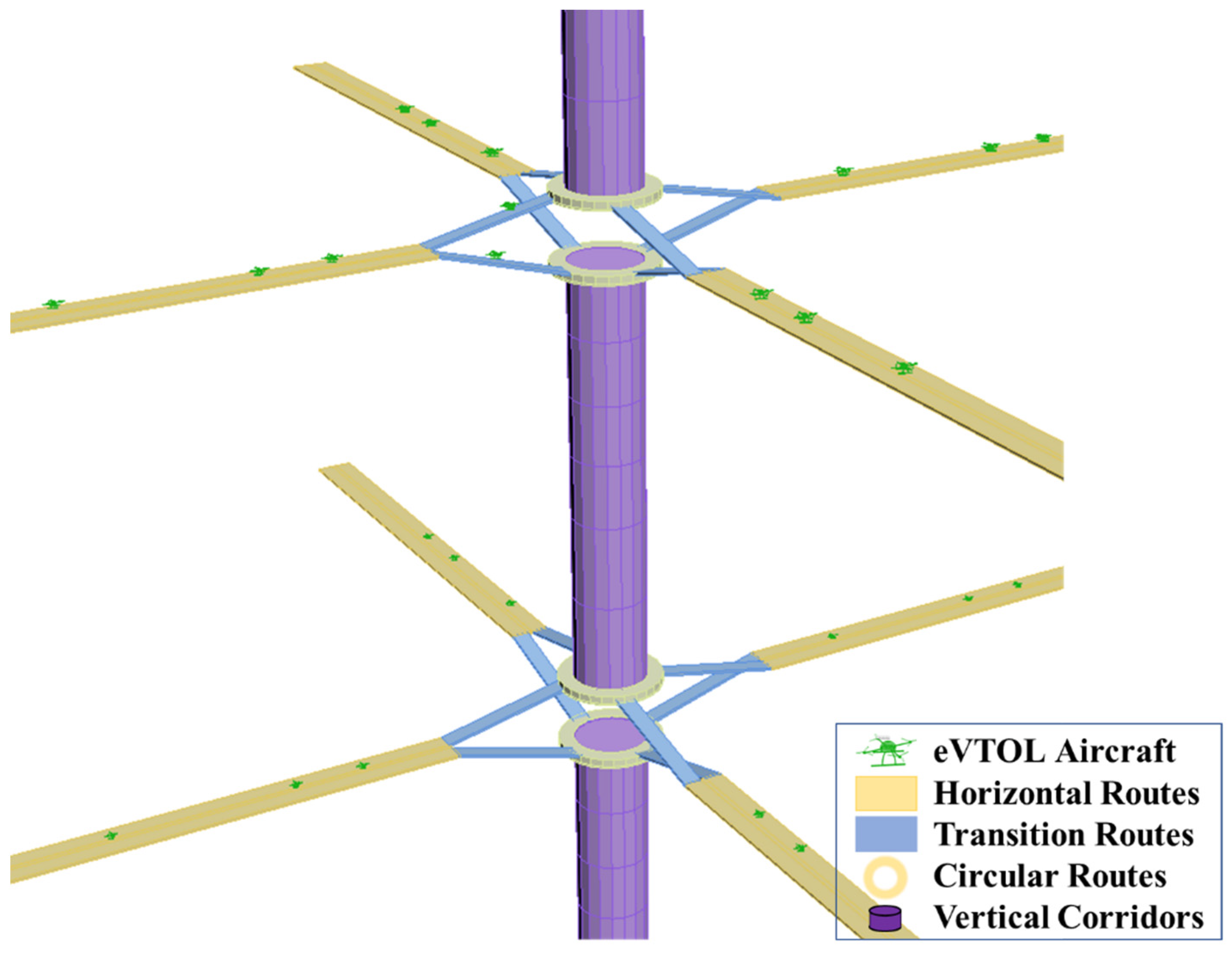
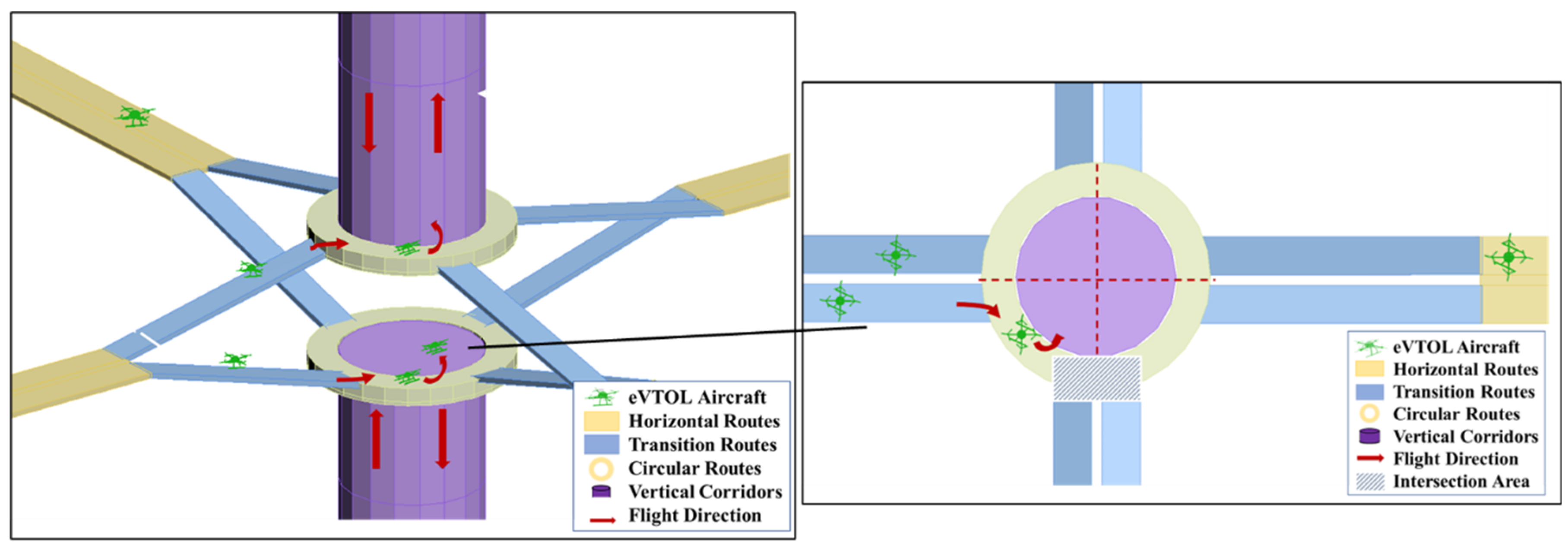
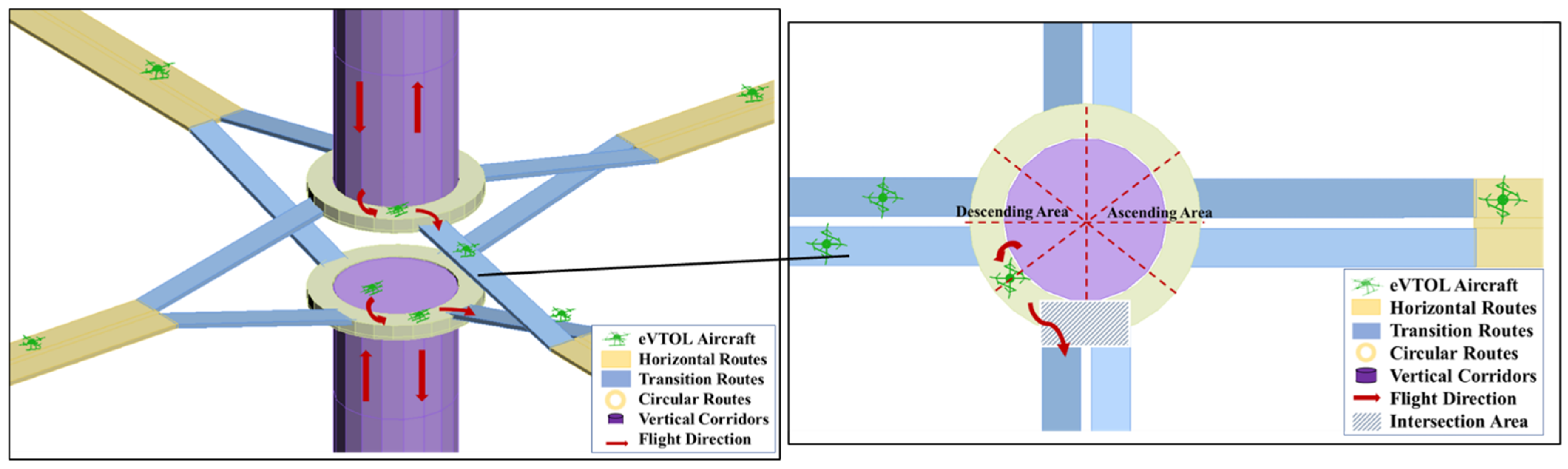
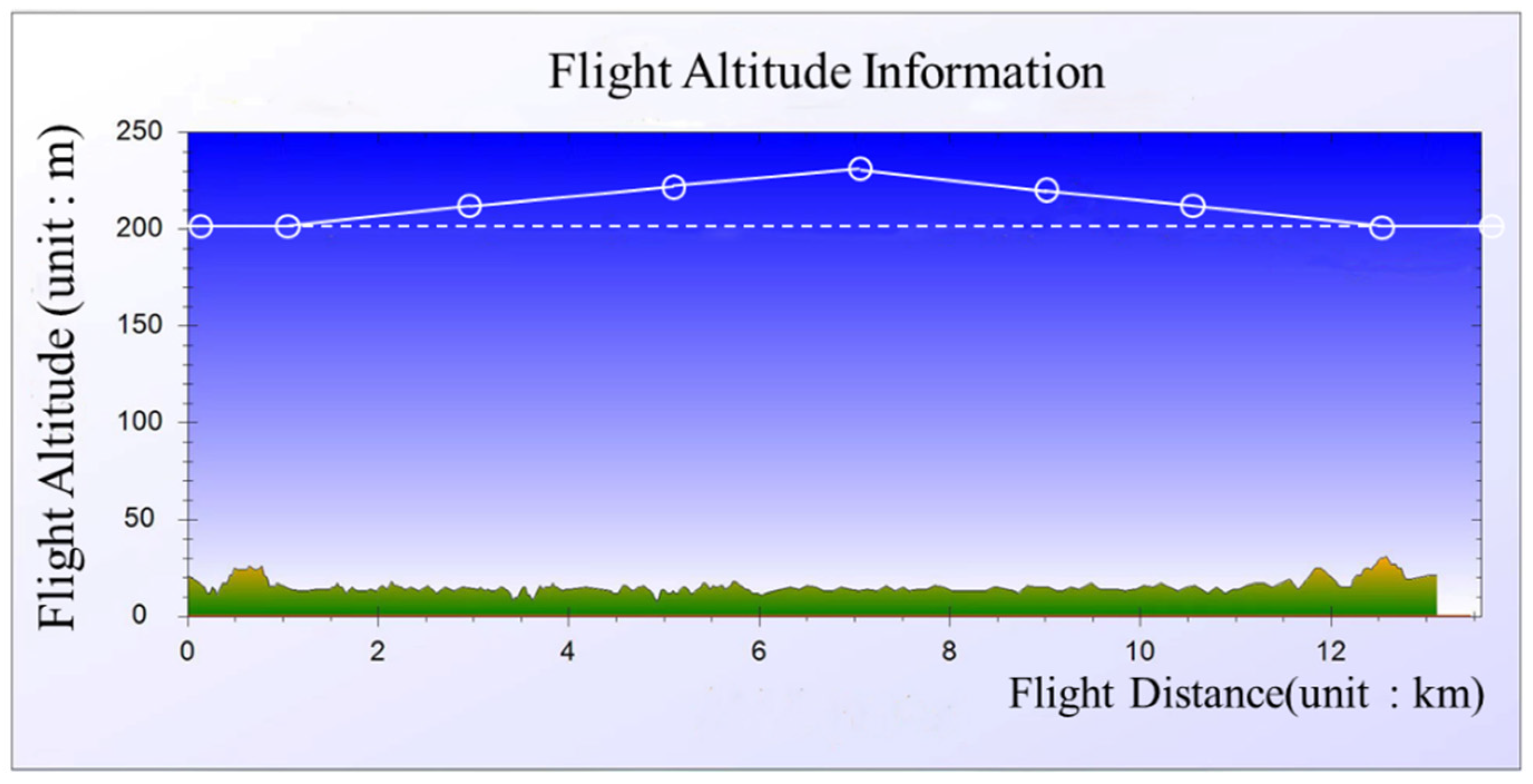
4.2.4. Altitude Transition Rules
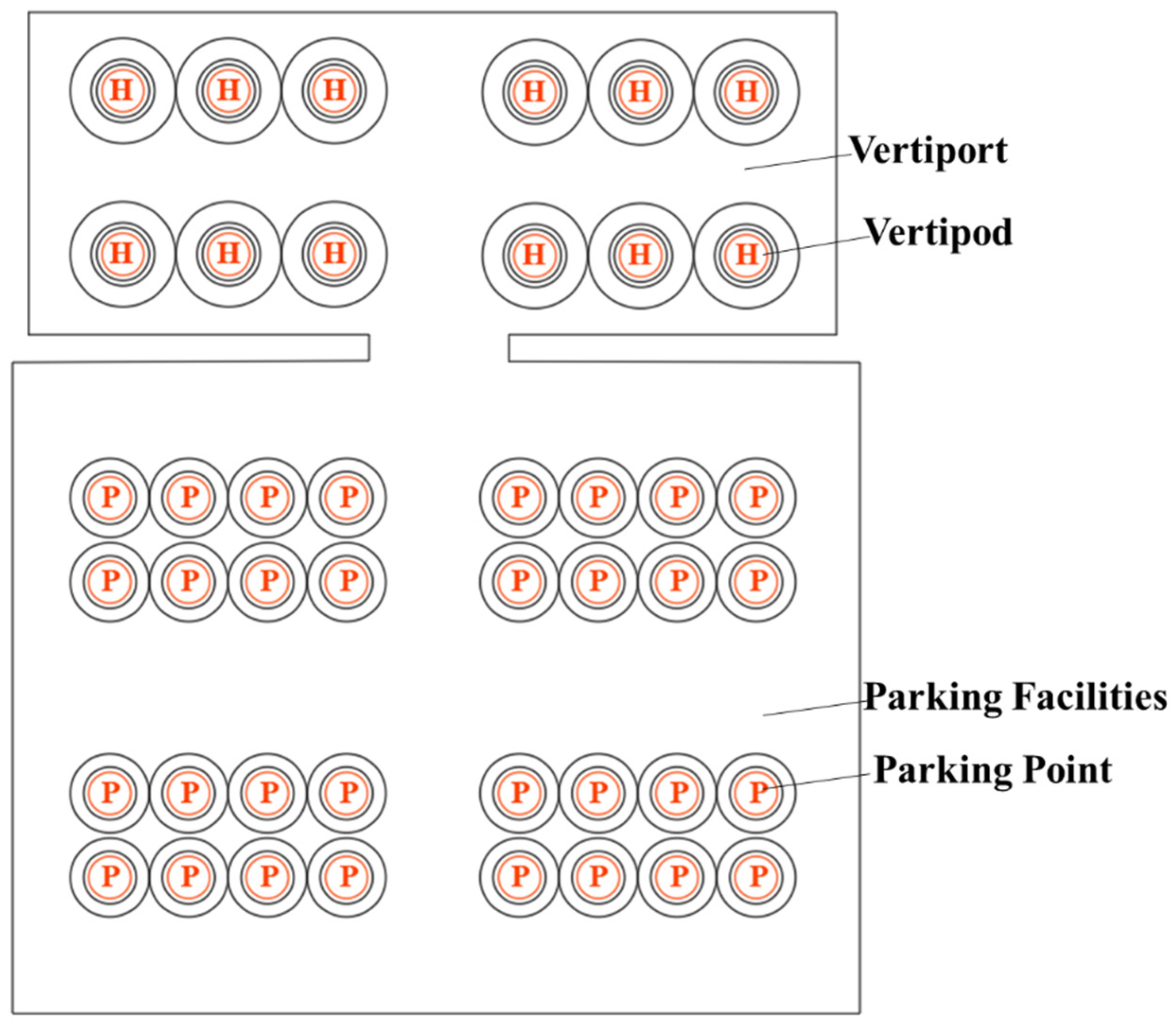
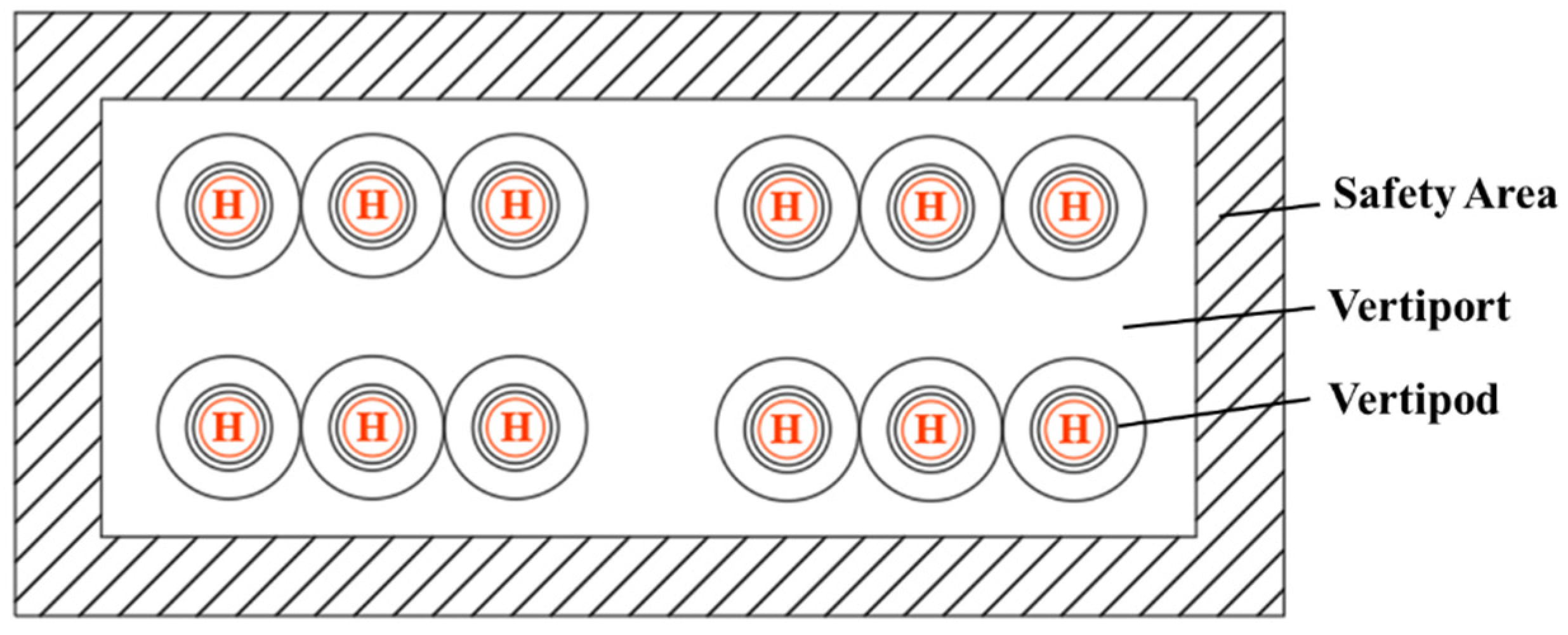
4.3. Vertiport Design
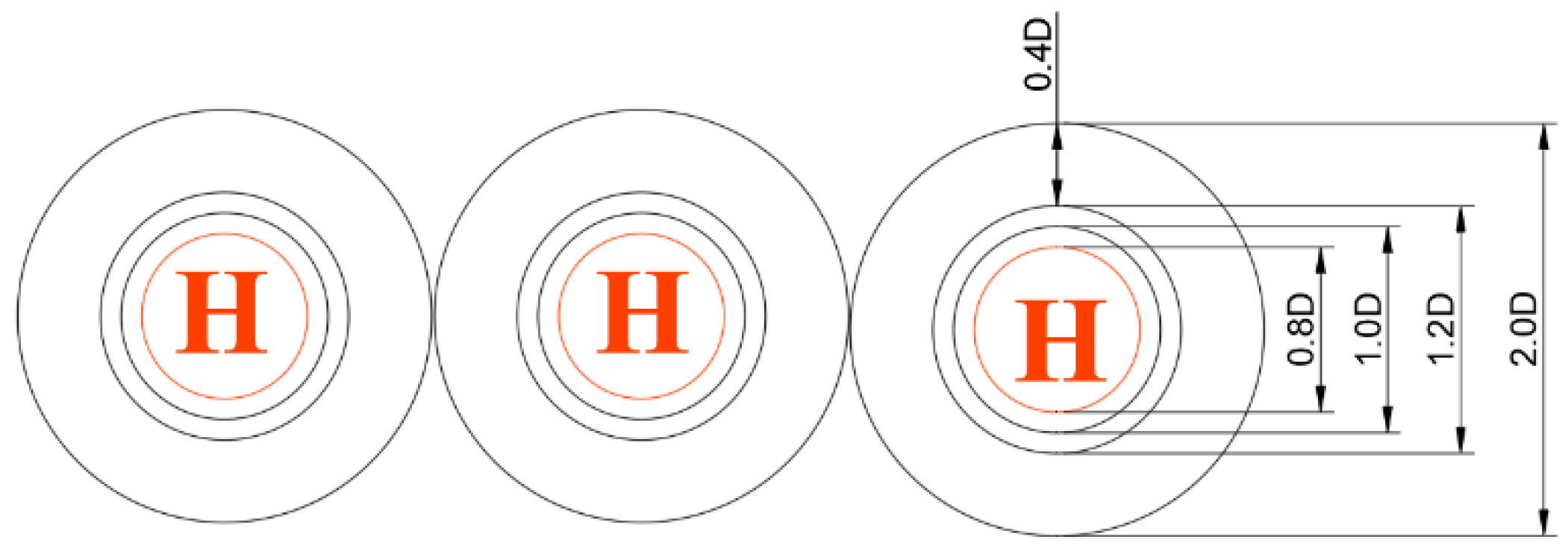
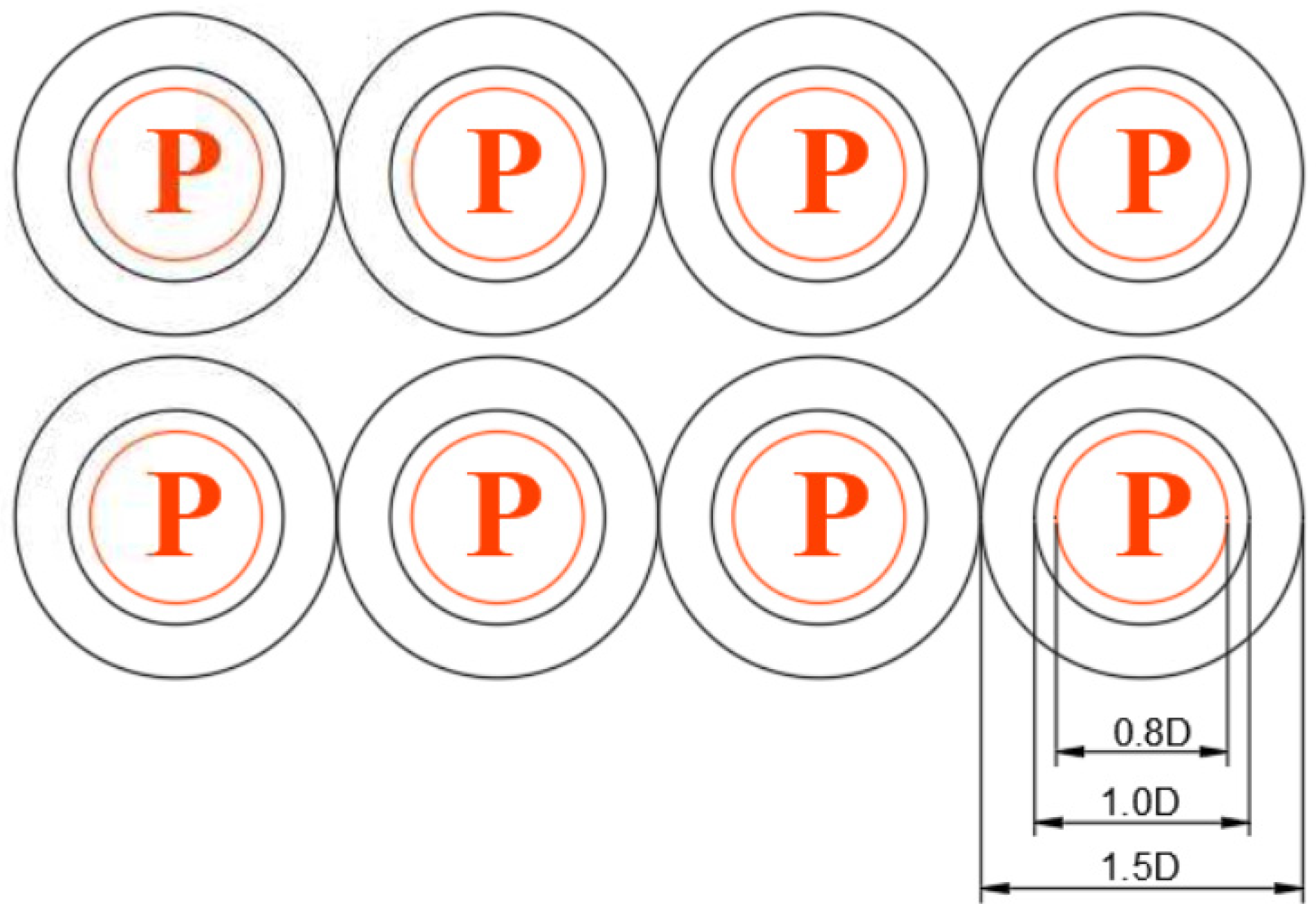
4.3.1. Vertipod and Parking Point Design
4.3.2. Vertiport Ground Layout
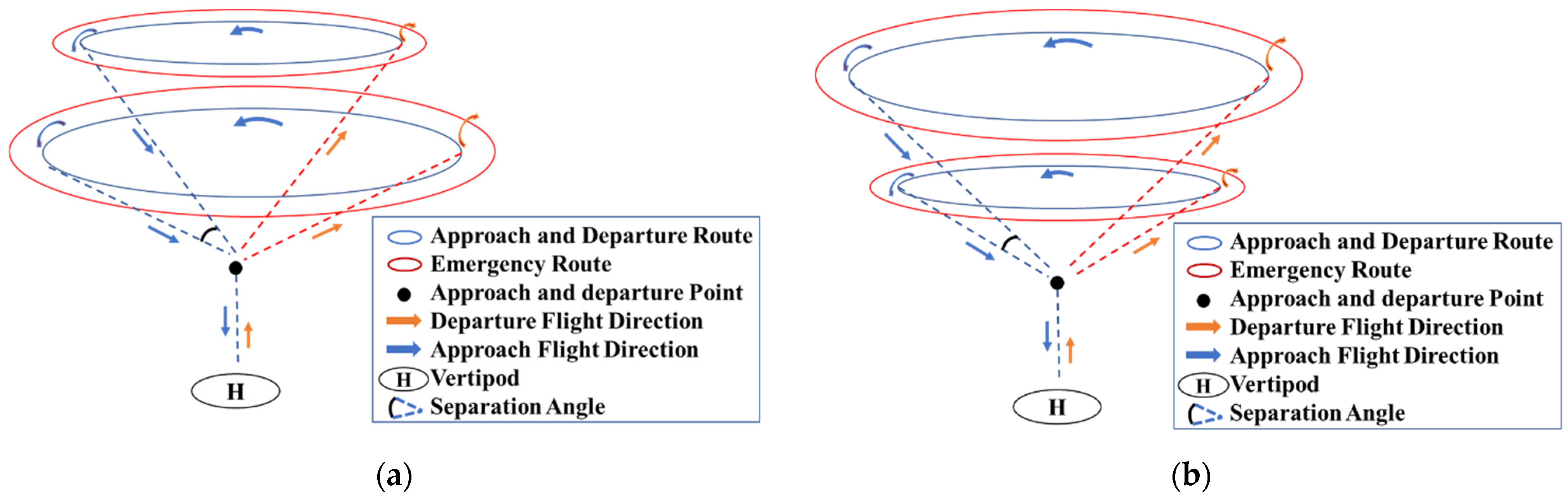
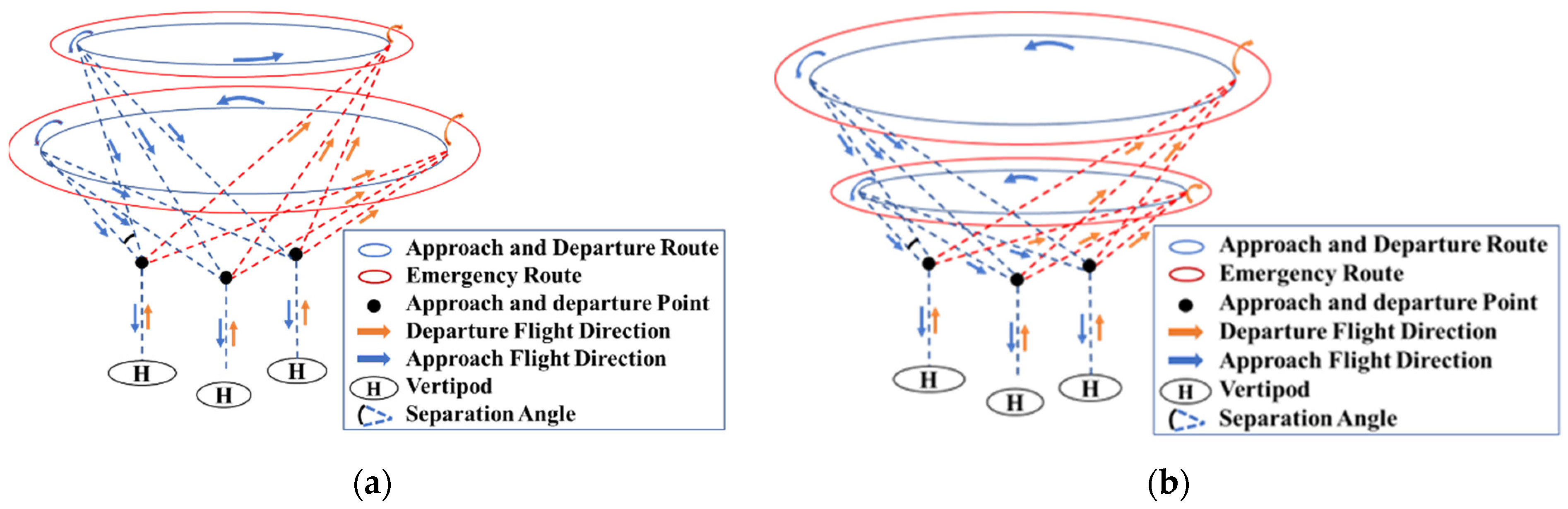
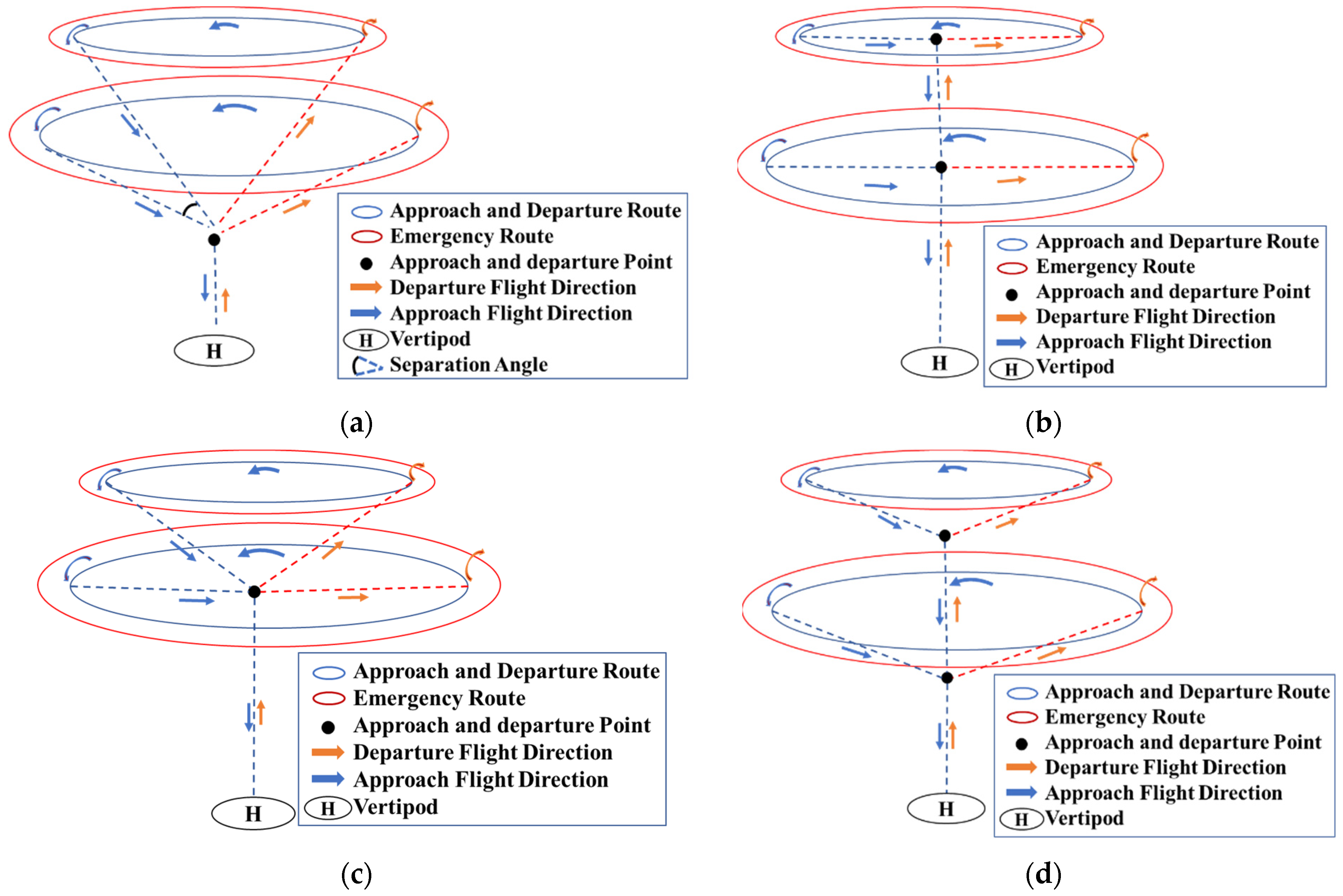
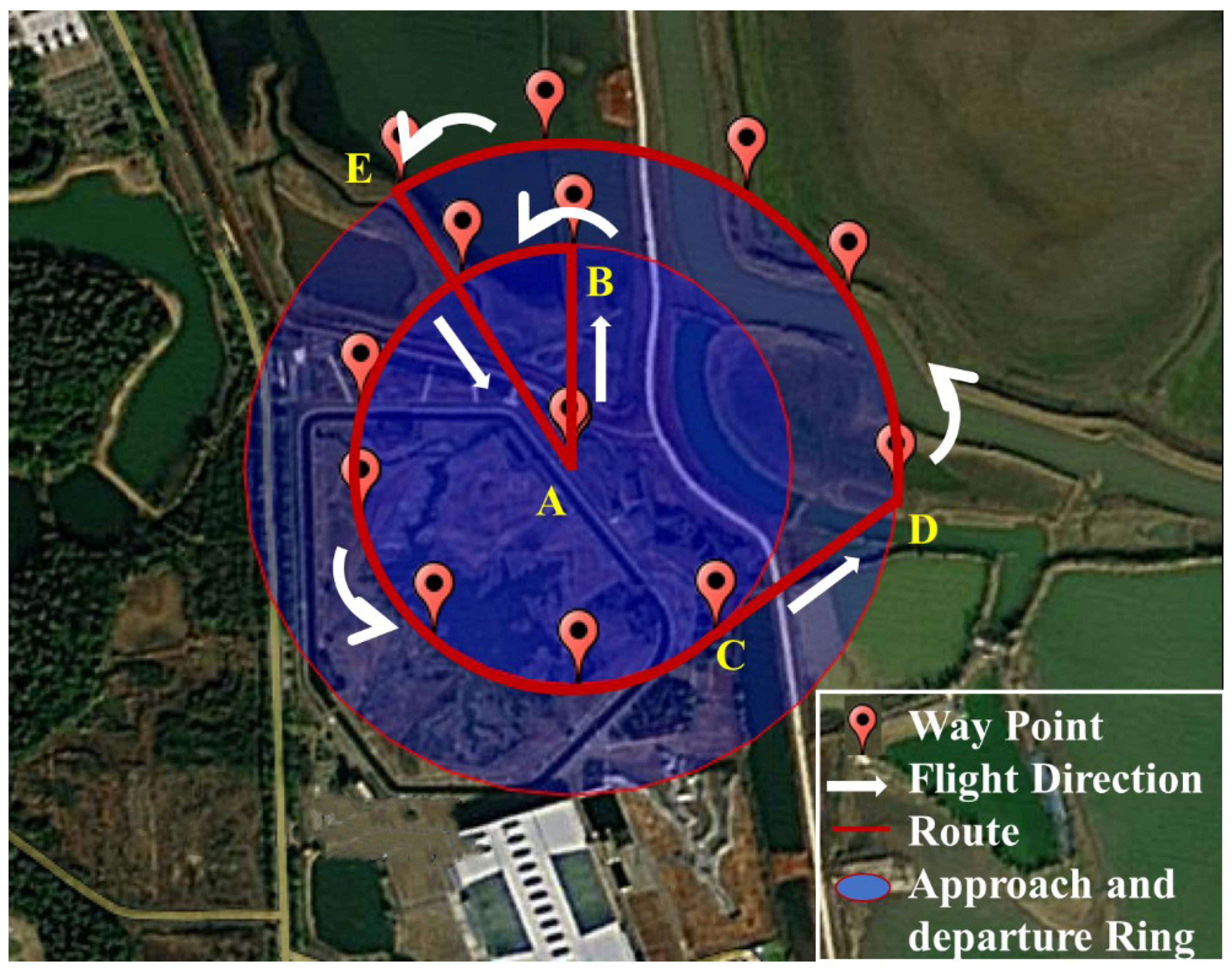
4.3.3. Terminal Area Approach and Departure Rules
- Terminal Area Route
- 2.
- Layout of Approaching and Departure Positioning Points in the Terminal Area
- 3.
- Operating Rule for Approach and Departure Route
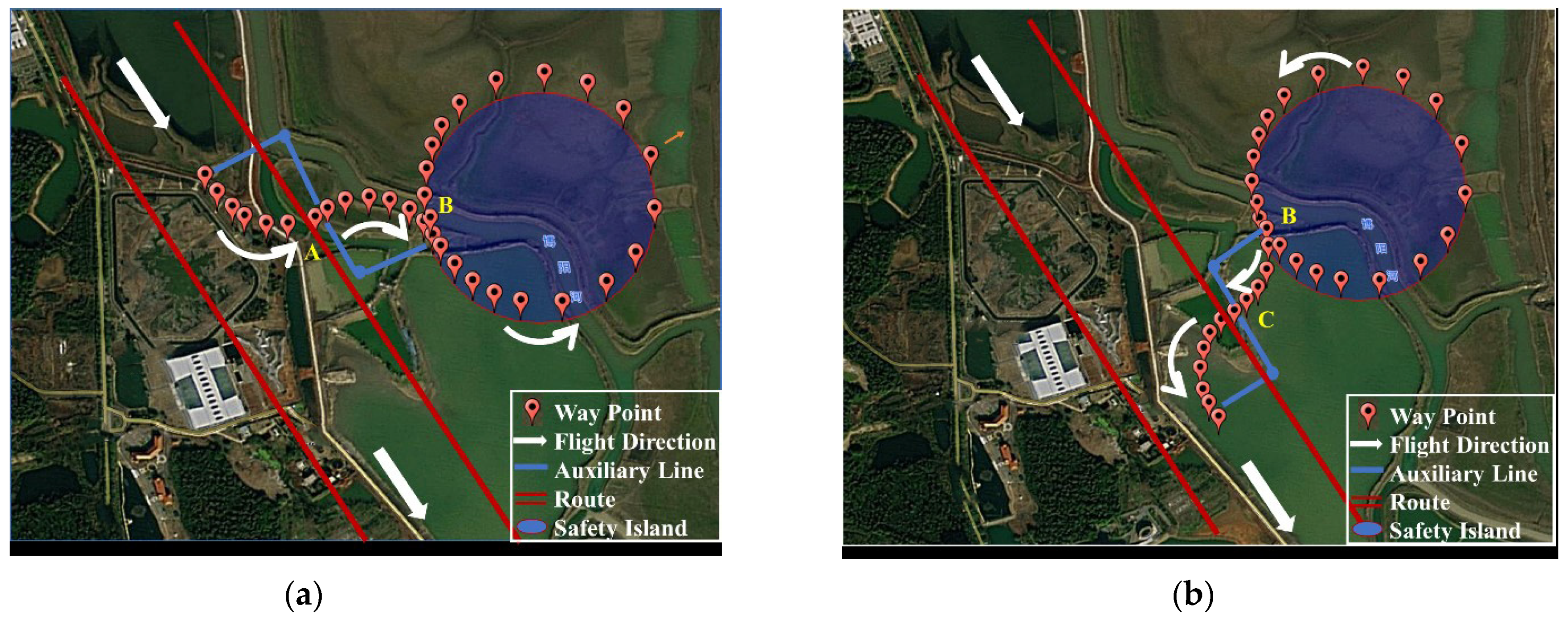
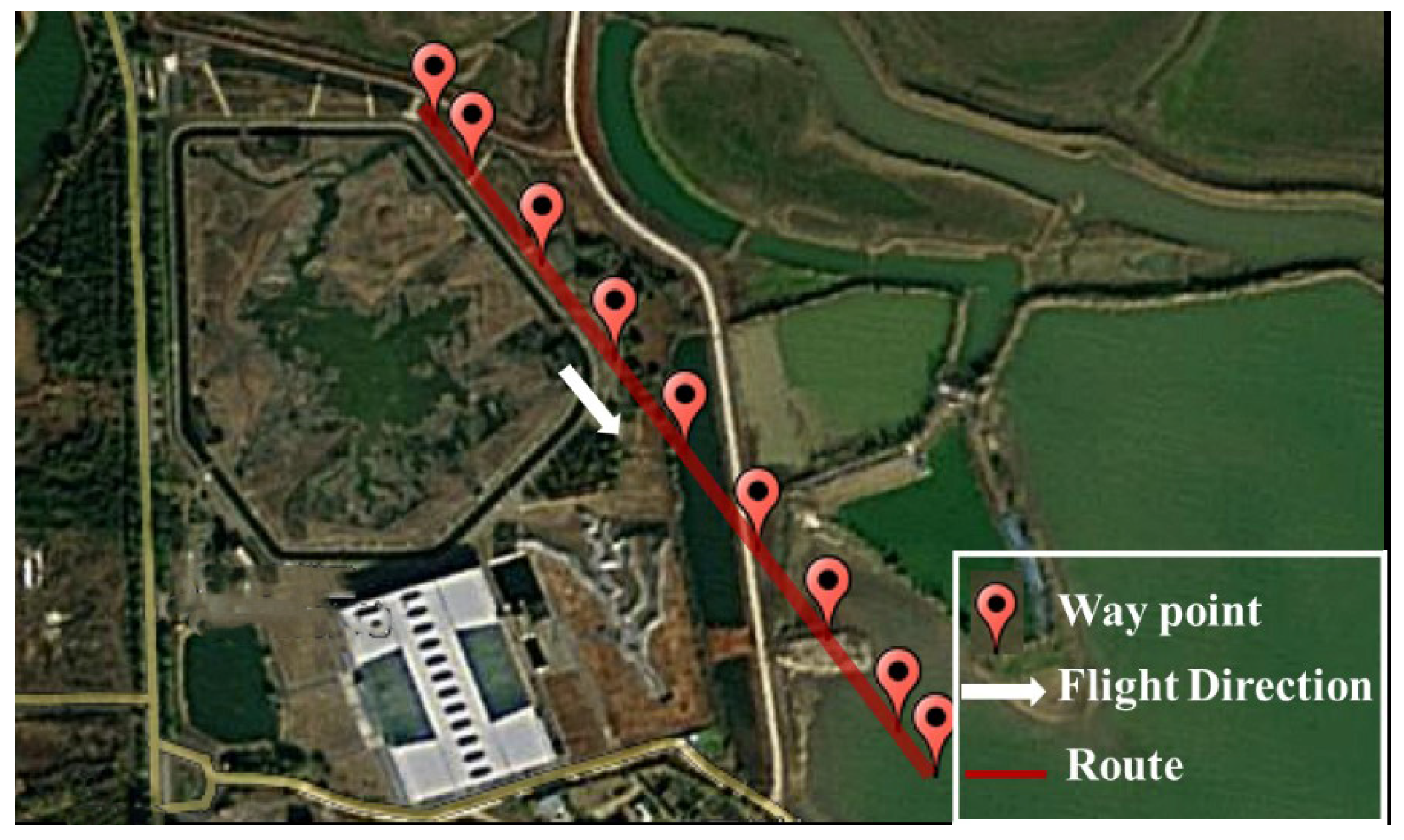
5. Simulation
5.1. Simulation of Entering and Leaving Route Rules
5.2. Simulation of Collision Avoidance Rules
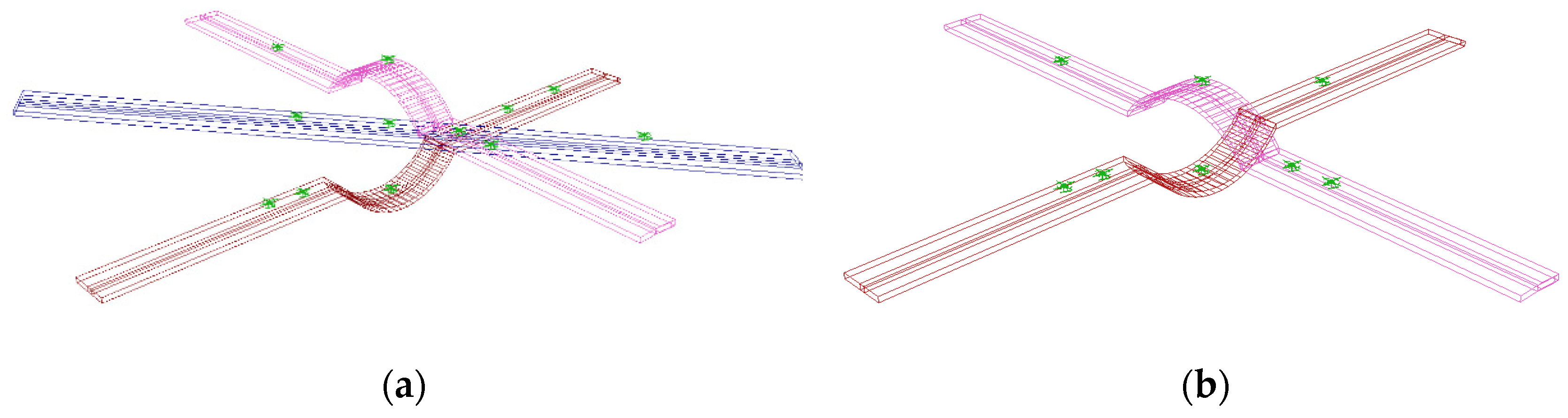
5.3. Simulation of Turning Rules
5.4. Simulation of Altitude Transition Rules
5.5. Simulation of Terminal Area Approach and Departure Rules
6. Conclusions and Research Limitations
6.1. Conclusions
6.2. Research Limitations
Author Contributions
Funding
Conflicts of Interest
References
- Schweiger, K.; Preis, L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones 2022, 6, 179. [Google Scholar] [CrossRef]
- Piancastelli, L.; Sali, M.; Leon-Cardenas, C. Basic Considerations and Conceptual Design of a VSTOL Vehicle for Urban Transportation. Drones 2022, 6, 102. [Google Scholar] [CrossRef]
- Sherman, J. eVTOLS—What are they? Presentation for: An Introduction to Urban Air Mobility for State and Local Decision Makers: A Virtual Workshop Sponsored by the Community Air Mobility Initiative (CAMI). Available online: https://www.communityairmobility.org/uam101 (accessed on 4 May 2021).
- Thipphavong, D.P.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Feary, M.; Go, S.; Goodrich, K.H.; Homola, J.; et al. Urban Air Mobility Airspace Integration Concepts and Considerations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Holden, J.; Goel, N. Fast-Forwarding to a Future of On-Demand Urban Air Transportation; Elevate: San Francisco, CA, USA, 2016. [Google Scholar]
- Collins, C.A.; Roberson, G.T.; Hale, S.A. FAA 14 CFR Part 107 for Commercial UAS and UAS as Agriculture Field Equipment: A Review for Agriculture Safety Standards; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2018. [Google Scholar]
- Kopardekar, P.; Rios, J.; Prevot, T.; Johnson, M.; Jung, J.; Robinson, J.E. Unmanned Aircraft System Traffic Management (UTM) Concept of Operations. In Proceedings of the American Institute of Aeronautics and Astronautics, Washington, DC, USA, 13 June 2016. [Google Scholar]
- SESAR. U-Space Blueprint; European Union: Brussels, Belgium, 2017. [Google Scholar]
- Çetin, E.; Cano, A.; Deransy, R.; Tres, S.; Barrado, C. Implementing Mitigations for Improving Societal Acceptance of Urban Air Mobility. Drones 2022, 6, 28. [Google Scholar] [CrossRef]
- EASA. Easy Access Rules for Standardised European Rules of the Air (SERA); European Union: Brussels, Belgium, March 2022.
- Xu, C.; Liao, X.; Ye, H.; Yue, H. Iterative construction of low-altitude UAV air route network in urban areas: Case planning and assessment. J. Geogr. Sci. 2020, 30, 1534–1552. [Google Scholar] [CrossRef]
- Pathiyil, L.; Low, K.H.; Soon, B.H.; Mao, S. Enabling Safe Operations of Unmanned Aircraft Systems in an Urban Environment: A Preliminary Study. In The International Symposium on Enhanced Solutions for Aircraft and Vehicle Surveillance Applications (ESAVS 2016); German Institute of Navigation and the German Aerospace Center (DLR): Berlin, Germany, 2016. [Google Scholar]
- UNICEF. Africa’s First Humanitarian Drone Testing Corridor Launched in Malawi by Government and UNICEF. Available online: https://www.unicef.org/press-releases/africas-first-humanitarian-drone-testing-corridor-launched-malawi-government (accessed on 29 June 2017).
- Handler, C.H. New York State Creates Nation’s First Air Corridor For Unmanned Aerial Vehicles. Available online: https://suffolklaw.com/new-york-state-creates-nations-first-air-corridor-for-unmanned-aerial-vehicles/#:~:text=New%20York%20State%20Creates%20Nation%E2%80%99s%20First%20Air%20Corridor,beyond%20line%20of%20sight%20for%20testing%20and%20development (accessed on 1 February 2018).
- Zazulia, N. Airbus Testing Unmanned Package Delivery in Singapore. Available online: https://www.aviationtoday.com/2018/02/07/airbus-testing-unmanned-package-delivery-singapore/#:~:text=Airbus%20plans%20to%20use%20unmanned%20aircraft%20systems%20%28UAS%29,robotic%20arm%2C%20and%20they%20will%20be%20delivered%20%5D (accessed on 7 February 2018).
- Kopardeka, P. Unmanned Aerial System (UAS) Traffic Management (UTM):Enabling Low-Altitude Airspace and UAS Operations; National Aeronautics and Space Administration: Pasadena, CA, USA, 2014.
- Hartley, R.J.a.L.; Henderson, I.L.; Jackson, C.L. BVLOS Unmanned Aircraft Operations in Forest Environments. Drones 2022, 6, 167. [Google Scholar] [CrossRef]
- Giliam, M.; Ellerbroek, J.; Badea, C.A.; Veytia, A.M. A Tactical Conflict Resolution Method for UAVs in Geovectored Airspace. In Proceedings of the SESAR Innovation Days, Budapest, Hungary, 5–8 December 2022. [Google Scholar]
- Ribeiro, M.; Ellerbroek, J.; Hoekstra, J. Improving Algorithm Conflict Resolution Manoeuvres with Reinforcement Learning. Aerospace 2022, 9, 847. [Google Scholar] [CrossRef]
- Veytia, A.M.; Badea, C.A.; Ellerbroek, J.; Hoekstra, J. Metropolis II: Benefits of Centralised Separation Management in HighDensity Urban Airspace. In Proceedings of the SESAR Innovation Days, Budapest, Hungary, 5–8 December 2022. [Google Scholar]
- Sunil, E.; Hoekstra, J.; Ellerbroek, J.; Bussink, F.; Vidosavljevic, A.; Delahaye, D.; Aalmoes, R. The Influence of Traffic Structure on Airspace Capacity. In Proceedings of In 7th International Conference on Research in Air; Transportation: Philadelphia, PA, USA, 2016. [Google Scholar]
- FAA. UTM Concept of Operations; FAA: Washington, DC, USA, 2 March 2020.
- Xue, M. Urban Air Mobility Conflict Resolution: Centralized or Decentralized? In Proceedings of the AIAA AVIATION 2020 FORUM, Online, 15–19 June 2020. [Google Scholar]
- Jang, D.-S.; Ippolito, C.A.; Sankararaman, S.; Stepanyan, V. Concepts of Airspace Structures and System Analysis for UAS Traffic flows for Urban Areas. In Proceedings of the AIAA Information Systems-AIAA Infotech @ Aerospace, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Shao, Q.; Shao, M.; Lu, Y. Terminal area control rules and eVTOL adaptive scheduling model for multi-vertiport system in urban air Mobility. Transp. Res. Part C: Emerg. Technol. 2021, 132, 103385. [Google Scholar] [CrossRef]
- Song, K.; Yeo, H. Development of optimal scheduling strategy and approach control model of multicopter VTOL aircraft for urban air mobility (UAM) operation. Transp. Res. Part C: Emerg. Technol. 2021, 128, 103181. [Google Scholar] [CrossRef]
- Dong, X.; Chong, P.; Xianshi, Y.; Ruiqing, L. Experomental investigation on the characteristics of wingtip vortex at low Reynolds number. J. Exp. Fluid Mech. 2019, 33, 36–41. [Google Scholar] [CrossRef]
- Saffman, P.G. Vortex Dynamics; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar] [CrossRef]
- EASA. Vertiports Prototype Technical Specifications for the Design of VFR Vertiports for Operation with Manned VTOL-Capable Aircraft Certified in the Enhanced Category; European aviation industry; EASA: Cologne, Germany, March 2022.
- FAA. Vertiport Design; Subject: Engineering Brief No. 105, Vertiport Design; FAA: Washington, DC, USA, 21 September 2022.



























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, W.; Xu, C.; Tan, X.; Tang, A.; He, H.; Liao, X. Preliminary Concept of Urban Air Mobility Traffic Rules. Drones 2023, 7, 54. https://doi.org/10.3390/drones7010054
Qu W, Xu C, Tan X, Tang A, He H, Liao X. Preliminary Concept of Urban Air Mobility Traffic Rules. Drones. 2023; 7(1):54. https://doi.org/10.3390/drones7010054
Chicago/Turabian StyleQu, Wenqiu, Chenchen Xu, Xiang Tan, Anqi Tang, Hongbo He, and Xiaohan Liao. 2023. "Preliminary Concept of Urban Air Mobility Traffic Rules" Drones 7, no. 1: 54. https://doi.org/10.3390/drones7010054
APA StyleQu, W., Xu, C., Tan, X., Tang, A., He, H., & Liao, X. (2023). Preliminary Concept of Urban Air Mobility Traffic Rules. Drones, 7(1), 54. https://doi.org/10.3390/drones7010054