
Robust Path-Following Control for AUV under Multiple Uncertainties and Input Saturation


Abstract
:1. Introduction
- (1)
- A robust controller is constructed to achieve the path-following control of the underactuated AUV with multiple uncertainties and input saturation. The multiple uncertainties, including external environmental disturbances, internal uncertainties, and unmodeled dynamics, are treated as lumped uncertainties, and then the ESOs are employed to estimate and eliminate them. The input saturation constraints are compensated by the auxiliary dynamic compensators. In addition, two command filters are employed to simplify controller design and address the “complexity explosion”. Distinct from the previous literature, both the multiple uncertainties and input saturation are considered in this paper, which makes the designed control strategy more suitable for complex marine environments;
- (2)
- A semi-physical simulation experiment platform is built to further validate the effectiveness of the proposed control algorithm. The underactuated AUV actuators are connected to the control system, and the real-time data of the actuators is read by the NI Compact cRIO-9068 real-time control computer and PLC S7-1200 industrial control computer. A human–machine interaction interface is developed based on LabVIEW, which visualizes the simulation results and can intuitively display information such as AUV position and velocity. Compared with computer simulation, semi-physical simulation experiments involve actual actuators, which can verify the effectiveness of the control strategy on actual hardware devices and reduce uncertainties caused by differences between theoretical models and actual systems.
2. Problem Formulation
2.1. Underactuated AUV Model in the Horizon Plane
2.2. The Error Dynamics Model
3. Control Law Design
3.1. The Design of the LOS Guidance Law
3.2. The Design of the Kinematic Control Law
3.3. The Design of Dynamic Control Law
4. Stability Analysis
5. Computer Simulation Analysis
6. Semi-Physical Simulation Experiment
6.1. Hardware Part
6.1.1. Propeller
6.1.2. Rudder
6.1.3. PLC S7-1200
6.1.4. NI Compact cRIO-9068
6.2. Software Part
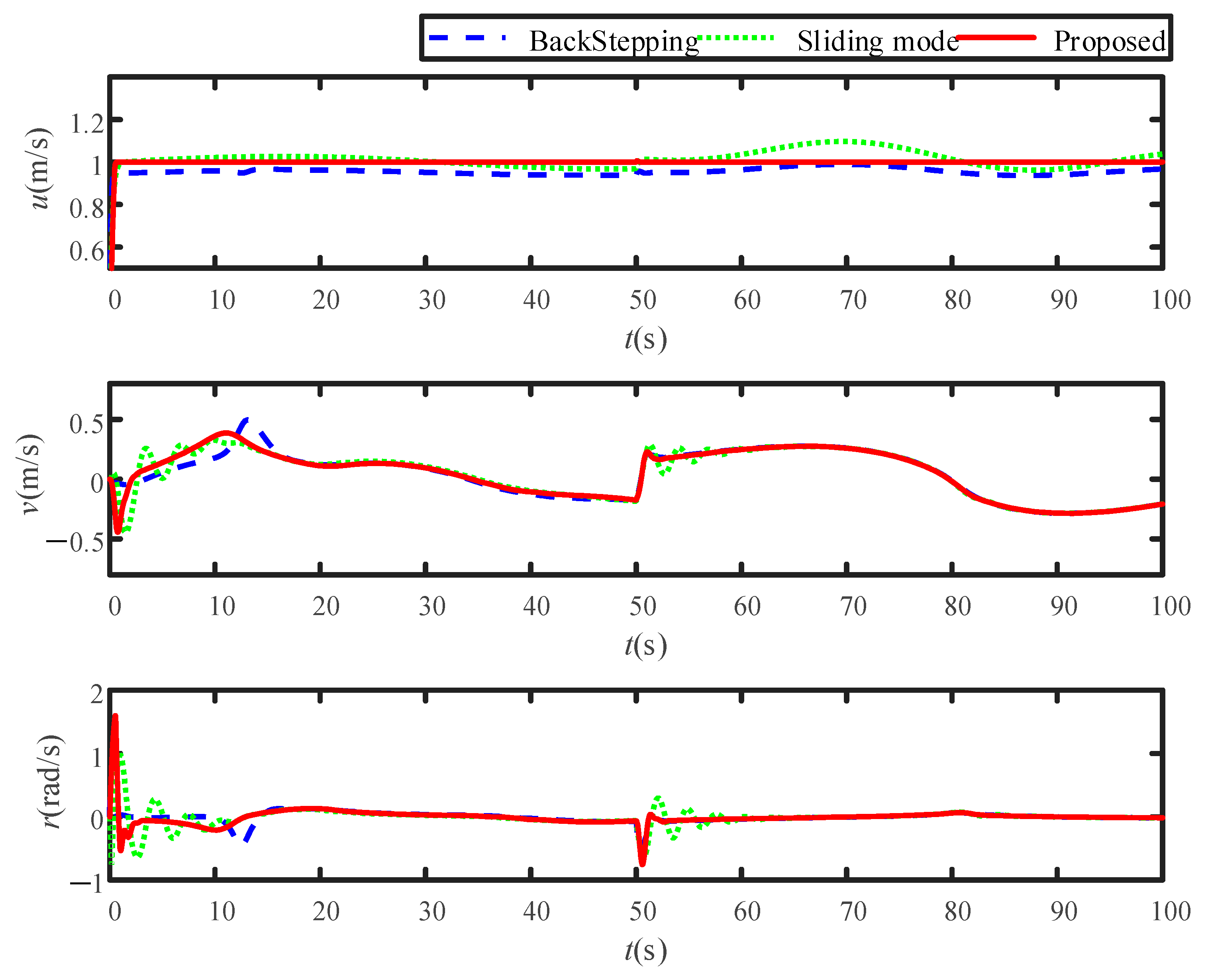
6.3. Experimental Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ahmed, F.; Xiang, X.; Jiang, C.; Xiang, G.; Yang, S. Survey on traditional and AI based estimation techniques for hydrodynamic coefficients of autonomous underwater vehicle. Ocean Engineering 2023, 268, 113300. [Google Scholar] [CrossRef]
- Hung, N.; Rego, F.; Quintas, J.; Cruz, J.; Jacinto, M.; Souto, D.; Potes, A.; Sebastiao, L.; Pascoal, A. A review of path following control strategies for autonomous robotic vehicles: Theory, simulations, and experiments. J. Field Robot. 2022, 40, 747–779. [Google Scholar] [CrossRef]
- Wang, Z.; Guan, X.; Liu, C.; Yang, S.; Xiang, X.; Chen, H. Acoustic communication and imaging sonar guided AUV docking: System infrastructure, docking methodology and lake trials. Control. Eng. Pract. 2023, 136, 105529. [Google Scholar] [CrossRef]
- Miao, J.; Wang, S.; Zhao, Z.; Li, Y.; Tomovic, M.M. Spatial curvilinear path following control of underactuated AUV with multiple uncertainties. ISA Trans. 2017, 67, 107–130. [Google Scholar] [CrossRef] [PubMed]
- Du, P.; Yang, W.; Chen, Y.; Huang, S.H. Improved indirect adaptive line-of-sight guidance law for path following of under-actuated AUV subject to big ocean currents. Ocean. Eng. 2023, 281, 114729. [Google Scholar] [CrossRef]
- Fossen, T.I. How to Incorporate Wind, Waves and Ocean Currents in the Marine Craft Equations of Motion. IFAC Proc. Vol. 2012, 45, 126–131. [Google Scholar] [CrossRef]
- Miao, J.; Sun, X.; Peng, C.; Liu, W. DOPH∞-based path-following control for underactuated marine vehicles with multiple disturbances and constraints. Ocean. Eng. 2022, 266, 113160. [Google Scholar] [CrossRef]
- Kim, S.; Cho, H.; Jung, D. Robust Path Following Control Via Command-Filtered Backstepping Scheme. Int. J. Aeronaut. Space Sci. 2021, 22, 1141–1153. [Google Scholar] [CrossRef]
- Li, M.; Guo, C.; Yu, H.; Yuan, Y. Line-of-sight-based global finite-time stable path following control of unmanned surface vehicles with actuator saturation. ISA Trans. 2022, 125, 306–317. [Google Scholar] [CrossRef]
- Sun, H.; Zong, G.; Cui, J.; Shi, K. Fixed-time sliding mode output feedback tracking control for autonomous underwater vehicle with prescribed performance constraint. Ocean. Eng. 2022, 247, 110673. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Castaneda, H. Guidance and Control Based on Adaptive Sliding Mode Strategy for a USV Subject to Uncertainties. IEEE J. Ocean. Eng. 2021, 46, 1144–1154. [Google Scholar] [CrossRef]
- Guo, X.-G.; Zhang, D.-Y.; Wang, J.-L.; Park, J.H.; Guo, L. Observer-Based Event-Triggered Composite Anti-Disturbance Control for Multi-Agent Systems Under Multiple Disturbances and Stochastic FDIAs. IEEE Trans. Autom. Sci. Eng. 2022, 20, 528–540. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, X.; Wang, S.; Miao, J. DO-LPV-based robust 3D path following control of underactuated autonomous underwater vehicle with multiple uncertainties. ISA Trans. 2020, 101, 189–203. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Wen, T.; He, X.; Xu, G. Robust trajectory tracking and control allocation of X-rudder AUV with actuator uncertainty. Control. Eng. Pract. 2023, 136, 105535. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, G.; Sun, Y.; Cao, J.; Wan, L.; Sheng, M.; Liu, Y. AUV near-wall-following control based on adaptive disturbance observer. Ocean. Eng. 2019, 190, 106429. [Google Scholar] [CrossRef]
- Guo, J.; Wang, J.; Bo, Y. An Observer-Based Adaptive Neural Network Finite-Time Tracking Control for Autonomous Underwater Vehicles via Command Filters. Drones 2023, 7, 604. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-Based Line-of-Sight Guidance Law for Path Following of Underactuated Marine Surface Vehicles With Exact Sideslip Compensation. IEEE J. Ocean. Eng. 2017, 42, 477–487. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y. On uniform semiglobal exponential stability (USGES) of proportional line-of-sight guidance laws. Automatica 2014, 50, 2912–2917. [Google Scholar] [CrossRef]
- Fossen, T.I. Line-of-sight path-following control utilizing an extended Kalman filter for estimation of speed and course over ground from GNSS positions. J. Mar. Sci. Technol. 2022, 27, 806–813. [Google Scholar] [CrossRef]
- Miao, J.; Wang, S.; Tomovic, M.M.; Zhao, Z. Compound line-of-sight nonlinear path following control of underactuated marine vehicles exposed to wind, waves, and ocean currents. Nonlinear Dyn. 2017, 89, 2441–2459. [Google Scholar] [CrossRef]
- Yu, C.; Liu, C.; Xiang, X.; Zeng, Z.; Wei, Z.; Lian, L. Line-of-sight guided time delay control for three-dimensional coupled path following of underactuated underwater vehicles with roll dynamics. Ocean. Eng. 2020, 207, 107410. [Google Scholar] [CrossRef]
- Wang, S.; Sun, M.; Xu, Y.; Liu, J.; Sun, C. Predictor-Based Fixed-Time LOS Path Following Control of Underactuated USV With Unknown Disturbances. IEEE Trans. Intell. Veh. 2023, 8, 2088–2096. [Google Scholar] [CrossRef]
- Li, M.; Guo, C.; Yu, H. Extended state observer-based integral line-of-sight guidance law for path following of underactuated unmanned surface vehicles with uncertainties and ocean currents. Int. J. Adv. Robot. Syst. 2021, 18, 172988142110110. [Google Scholar] [CrossRef]
- Ma, J.; Liu, K.; Tan, C. Finite-time robust containment control for autonomous surface vehicle with input saturation constraint. Ocean. Eng. 2022, 252, 111111. [Google Scholar] [CrossRef]
- Zheng, Z.; Xie, L. Finite-time path following control for a stratospheric airship with input saturation and error constraint. Int. J. Control 2017, 92, 368–393. [Google Scholar] [CrossRef]
- Zheng, Z.; Sun, L.; Xie, L. Error-Constrained LOS Path Following of a Surface Vessel With Actuator Saturation and Faults. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1794–1805. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Improved line-of-sight trajectory tracking control of under-actuated AUV subjects to ocean currents and input saturation. Ocean. Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R.; Zheng, S.; Dong, S.; Sun, G. Fixed-time disturbance observer-based robust fault-tolerant tracking control for uncertain quadrotor UAV subject to input delay. Nonlinear Dyn. 2022, 107, 2363–2390. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R. Antisaturation Command Filtered Backstepping Control-Based Disturbance Rejection for a Quadrotor UAV. IEEE Trans. Circuits Syst. II: Express Briefs 2021, 68, 3577–3581. [Google Scholar]
- Klein, S.; Xia, F.; Etzold, K.; Andert, J.; Amringer, N.; Walter, S.; Blochwitz, T.; Bellanger, C. Electric-Motor-in-the-Loop: Efficient Testing and Calibration of Hybrid Power Trains. IFAC Pap. OnLine 2018, 51, 240–245. [Google Scholar] [CrossRef]
- Chiah, T.L.; Hoo, C.L. Hardware simulation of semi-decoupled tuning gain anti-windup PI controllers for motor speed application. In Proceedings of the International Engineering Research Conference—12th Eureca 2019, Kedah, Malaysia, 3–4 July 2019. [Google Scholar]
- Suo, B.; Wang, M.; Yuan, F.; Geng, H.; Yan, Y. Integrity Detection and Supplementary Experimental Design of Semi-Physical Simulation Data on Aircraft Landing Points. Appl. Sci. 2023, 13, 2889. [Google Scholar] [CrossRef]
- Jun, N. Research on Path Following Robust Control for Underactuated Marine Surface Vessel. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2019. [Google Scholar]
- Xing, Z.; Jian, L.; Yibo, L. Design of AUV semi-physical simulation system based on LabVIEW/Matlab. Comput. Eng. Appl. 2014, 50, 48–53. [Google Scholar]
- Do, K.D. Robust adaptive tracking control of underactuated ODINs under stochastic sea loads. Robot. Auton. Syst. 2015, 72, 152–163. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Wang, W.; Xu, G.; Xiang, X.; Li, Y. Optimal robust trajectory tracking control of an X-rudder AUV with velocity sensor failures and uncertainties. Ocean. Eng. 2020, 198, 106949. [Google Scholar] [CrossRef]
- Miao, J.; Deng, K.; Zhang, W.; Gong, X.; Lyu, J.; Ren, L. Robust Path-Following Control of Underactuated AUVs with Multiple Uncertainties in the Vertical Plane. J. Mar. Sci. Eng. 2022, 10, 238. [Google Scholar] [CrossRef]
- Zhuang, Y.; Sun, X.; Li, Y.; Huai, J.; Hua, L.; Yang, X.; Cao, X.; Zhang, P.; Cao, Y.; Qi, L.; et al. Multi-sensor integrated navigation/positioning systems using data fusion: From analytics-based to learning-based approaches. Inf. Fusion 2023, 95, 62–90. [Google Scholar] [CrossRef]
- Yu, C.; Liu, C.; Lian, L.; Xiang, X.; Zeng, Z. ELOS-based path following control for underactuated surface vehicles with actuator dynamics. Ocean. Eng. 2019, 187, 106139. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Han, Q.-L. Path-Following Control of Autonomous Underwater Vehicles Subject to Velocity and Input Constraints via Neurodynamic Optimization. IEEE Trans. Ind. Electron. 2019, 66, 8724–8732. [Google Scholar] [CrossRef]
- Shao, X.; Wang, H. Active disturbance rejection based trajectory linearization control for hypersonic reentry vehicle with bounded uncertainties. ISA Trans. 2015, 54, 27–38. [Google Scholar] [CrossRef]
- Xingling, S.; Honglun, W. Back-stepping active disturbance rejection control design for integrated missile guidance and control system via reduced-order ESO. ISA Trans. 2015, 57, 10–22. [Google Scholar] [CrossRef]
- Lapierre, L.; Soetanto, D. Nonlinear path-following control of an AUV. Ocean. Eng. 2007, 34, 1734–1744. [Google Scholar] [CrossRef]
- Zheng, Z. Moving path following control for a surface vessel with error constraint. Automatica 2020, 118, 109040. [Google Scholar] [CrossRef]
- Farrell, J.A.; Polycarpou, M.; Sharma, M.; Wenjie, D.; Backstepping, C.F. Command Filtered Backstepping. IEEE Trans. Autom. Control. 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Zheng, Z.; Ruan, L.; Zhu, M.; Guo, X. Reinforcement learning control for underactuated surface vessel with output error constraints and uncertainties. Neurocomputing 2020, 399, 479–490. [Google Scholar] [CrossRef]
- Arnold, V. Mathematical Method of Classic Mechanics; Springer: New York, NY, USA, 1988. [Google Scholar]
- Yao, X.; Wang, X.; Jiang, X.; Wang, F. Control for 3D path-following of underactuated autonomous underwater vehicle under current disturbance. J. Harbin Inst. Technol. 2019, 51, 37–45. [Google Scholar]
- Hu, C.; Wang, R.; Yan, F. Integral Sliding Mode-Based Composite Nonlinear Feedback Control for Path Following of Four-Wheel Independently Actuated Autonomous Vehicles. IEEE Trans. Transp. Electrif. 2016, 2, 221–230. [Google Scholar] [CrossRef]
- Xiang, X.; Lapierre, L.; Jouvencel, B. Smooth transition of AUV motion control: From fully-actuated to under-actuated configuration. Robot. Auton. Syst. 2015, 67, 14–22. [Google Scholar] [CrossRef]
- Lapierre, L.; Jouvencel, B. Robust nonlinear path-following control of an AUV. IEEE J. Ocean. Eng. 2008, 33, 89–102. [Google Scholar] [CrossRef]
- Liu, K.; Yang, P.; Wang, R.; Jiao, L.; Li, T.; Zhang, J. Observer-Based Adaptive Fuzzy Finite-Time Attitude Control for Quadrotor UAVs. IEEE Trans. Aerosp. Electron. Syst. 2023, 9, 69481–69491. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Value | |||
|---|---|---|---|---|
| The proposed controller | 9 | 5.1 | 1.4 | 6.1245 |
| The backstepping controller | 19 | 7.1 | 2.8 | 30 |
| The sliding mode controller | 14 | 7.5 | 11.1 | 6.4145 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, J.; Sun, X.; Chen, Q.; Zhang, H.; Liu, W.; Wang, Y. Robust Path-Following Control for AUV under Multiple Uncertainties and Input Saturation. Drones 2023, 7, 665. https://doi.org/10.3390/drones7110665
Miao J, Sun X, Chen Q, Zhang H, Liu W, Wang Y. Robust Path-Following Control for AUV under Multiple Uncertainties and Input Saturation. Drones. 2023; 7(11):665. https://doi.org/10.3390/drones7110665
Chicago/Turabian StyleMiao, Jianming, Xingyu Sun, Qichao Chen, Haosu Zhang, Wenchao Liu, and Yanyun Wang. 2023. "Robust Path-Following Control for AUV under Multiple Uncertainties and Input Saturation" Drones 7, no. 11: 665. https://doi.org/10.3390/drones7110665
APA StyleMiao, J., Sun, X., Chen, Q., Zhang, H., Liu, W., & Wang, Y. (2023). Robust Path-Following Control for AUV under Multiple Uncertainties and Input Saturation. Drones, 7(11), 665. https://doi.org/10.3390/drones7110665