1. Introduction
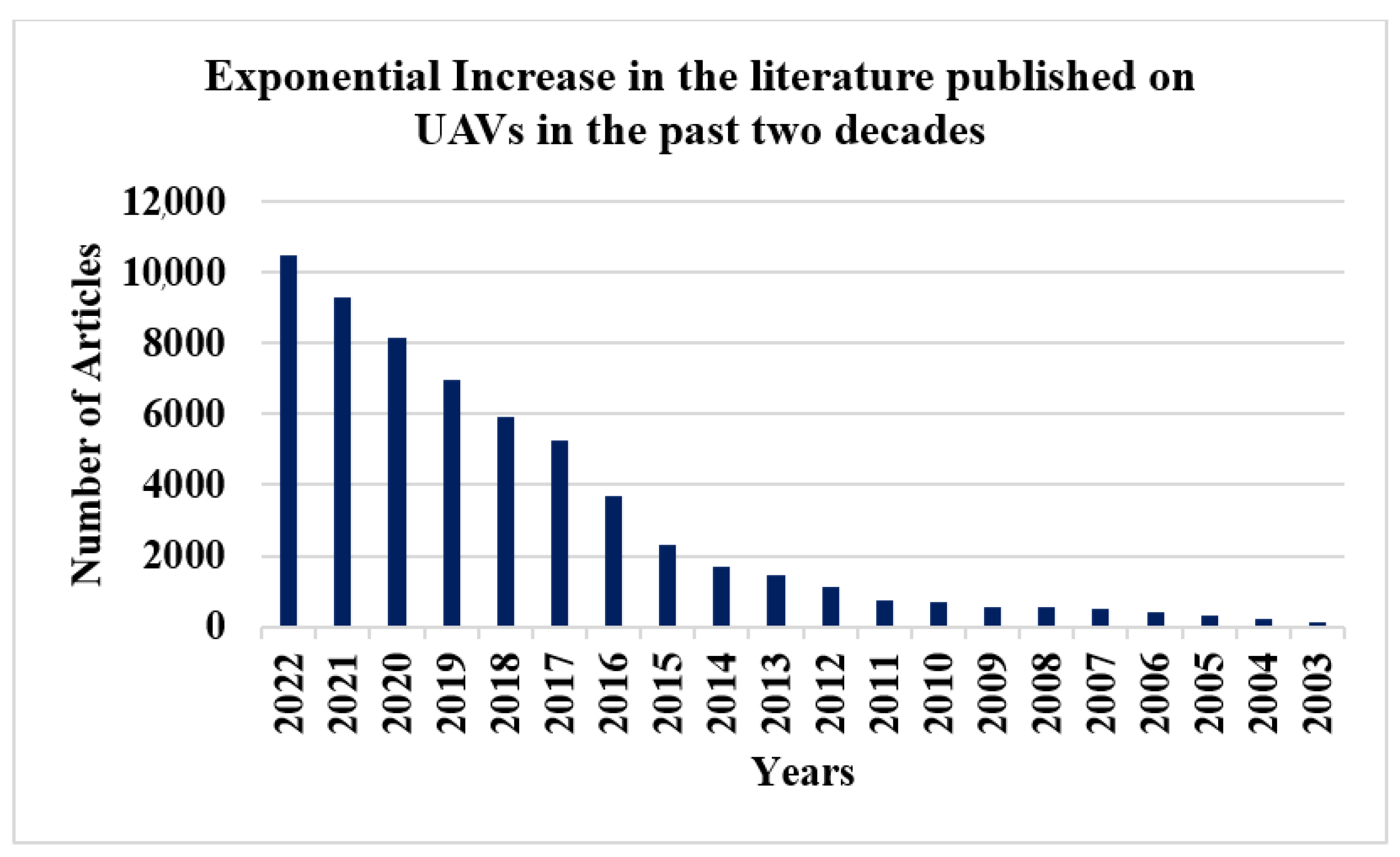
Research progress, in terms of published literature, on unmanned aerial vehicles (UAVs) has observed exponential growth, as shown in
Figure 1. The graph depicts the published literature indexed by the Web of Science for the keyword “UAV” for the past 20 years, and it shows that more than 70% of the articles on UAVs have been published in the past five years, hence validating the necessity of a review for the duration.
One of the major factors for such a surge in the published literature is the growing contributions and collaboration of UAVs in multi-disciplinary research. Data collection operations are the prime motive for most UAV applications. This extends to many disparate research areas, even geology, chemistry, physical geography, agriculture, water resources, transportation, and environmental sciences, other than engineering, robotics, telecommunication, and computer sciences, as presented in
Figure 2.
One of the most eminent components of any autonomous UAV is its ability to generate its path or trajectory. From ability, it is referred to as the effectiveness of the mechanism of generating a path from an algorithm and translating it into maneuvering instructions. One way to see such autonomy is the mere absence of human intervention in robot operations. However, the highest level of autonomy for unmanned systems stands as an unclear goal.
A few possible reasons behind this are the ever-increasing complexity of their applications, mutual collaborations, workspace structures, environment perception, and performance metrics. Nonetheless, this study attempts to establish and present viewpoints to categorize and rank the extent of autonomy for unmanned systems.
The outcome of this study can be viewed in a two-fold manner:
Identify various parameters that are usually considered for the selection of literature from the primary studies and offer them as a look-up referral for the readers; and
Establish research directions, open challenges, and highlight state-of-the-art solutions through SLR methodology.
The article is organized as the following sequences of sections and subsections. The SLR starts by refereeing to a study that asserted the importance of the adaptation of SLRs in engineering and has been the guiding light for this work. Thereafter, a section explaining the deployed SLR methodology with the research questions is presented. There is a formal emphasis on the fact that there has not been a published ‘SLR’ on this subject. The next phase offers the core process of doing SLR through the parametric classification of the literature with percentages, based on which the research directions, open challenges, and some worth-mentioning contributions are added in the penultimate section.
Why Systematic Literature Review (SLR)?
An SLR is a structural research study in which the plan and criteria to search, assess, and analyze the literature against a set of questions are defined before executing the review. A notable study [
1] has emphasized the need and significance of SLRs in engineering and has also been the guiding light for crafting this SLR. The same study reported that engineering education requires improvements under progression, model publications, and seminal publications. The study also recommended that SLRs possess the tremendous potential to become the model and seminal publications for research review.
2. SLR Methodology
An SLR methodology is a standardized process, in general, that comprises the following sequence of steps and may also serve as a checklist of the process:
Identify the key Research Questions (RQs);
Define the Review Protocol (RP) based on the following:
Related work;
Review parameters and synthesis; and
Research Directions (RDs)
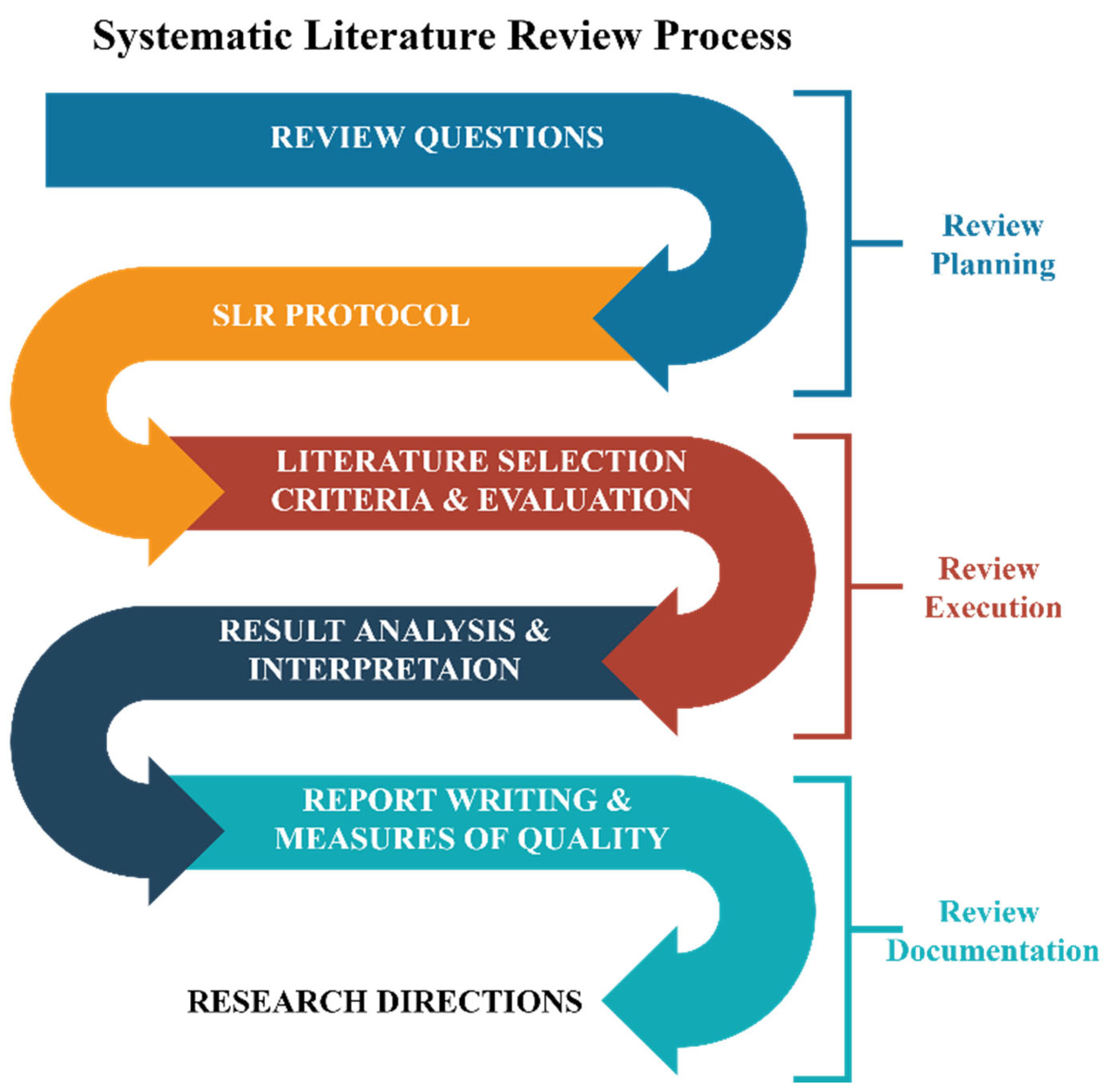
These steps are organized into three phases: review planning, review execution, and review documentation.
Figure 3 presents the adopted process of the SLR.
Research Questions
The first step in an SLR methodology is to identify the Research Questions (RQs) that actually are the work objectives and lead to the research directions (RDs). This SLR addresses the following four RQs while exploring the selected literature through 20 vital parameters:
- RQ1:
What are the key research tracks, their open challenges, and their significant contributions to autonomous path planning of UAVs?
- RQ2:
How the extent of a UAV’s autonomy can be or should be measured?
- RQ3:
What frameworks and technologies have been used by researchers to research autonomous UAVs?
- RQ4:
What and if there has been a critique or a fundamental challenge that AI faces and which may affect the future of autonomous systems?
3. Review Protocol
SLRs are bound to observe a review protocol. The protocol for this study is borrowed from PRISMA (Preferred Reporting Items for Systematic Reviews and Meta-Analyses). PRISMA is a reporting guideline for systematic reviews and meta-analyses. It provides a standardized, evidence-based minimum set of items for reporting in this type of study, aimed at improving the transparency, completeness, and accuracy of their reporting, making them more helpful to readers and easier to compare between studies [
2]. Moreover, PRISMA recommends following a checklist adopted and outlined under the SLR methodology. It comprises the following steps and subsections: ‘employed database’ for the selection of primary studies, ‘inclusion criteria’, ‘exclusion criteria’ to filter the primary studies search results, and ‘quality assurance’ to identify and overcome any bias in the selection of primary studies.
This SLR was not registered anywhere, and the protocol for this study has not been reported as well, as is how it is practiced in health and social science research. However, the adopted methodology followed the recommended guidelines published under [
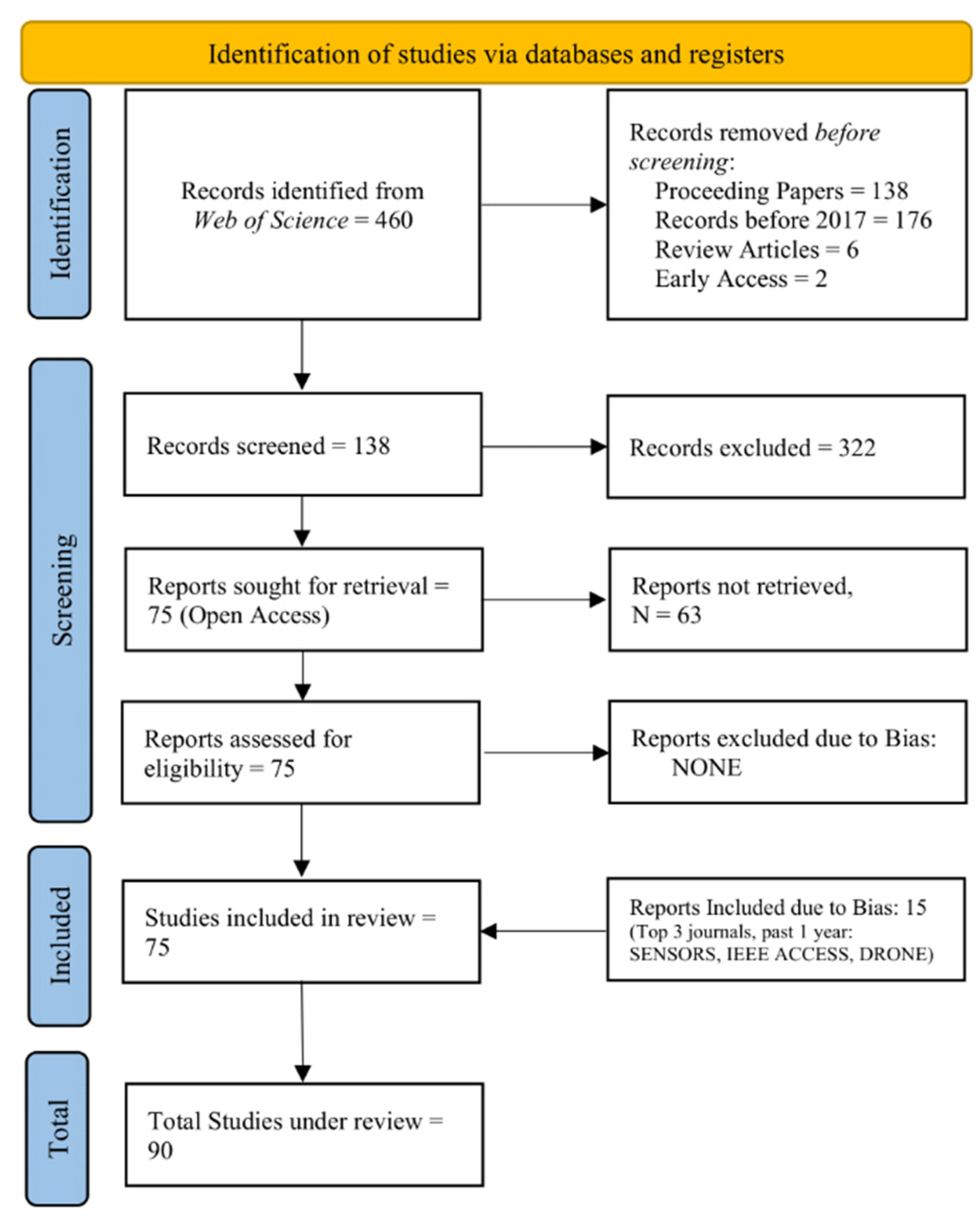
1]. Moreover, SLRs have just started to gain acceptance in the engineering disciplines. The selection criteria are presented in
Figure 4.
3.1. Employed Database
The following criteria were used to collect the initial set of primary studies:
| Database: | Web of Science Core Collection |
| Keywords set: | Autonomous + path planning + UAV |
| Search Field: | All Fields |
3.2. Inclusion Criteria
| Duration: | 5 years approx. (2017–2022). |
| Publications Type: | Journal Articles. |
| Journals Credibility: | Q1–Q4 (JCR 2020). |
| Access Consideration: | Open access |
3.3. Exclusion Criteria
| Publication Type: | Review Articles. |
| Meetings: | Conference Proceedings. |
| Language: | Other than the English language. |
| Access Consideration: | Early Access. |
3.4. Quality Assurance
The quality measures applied to the collected articles after the exclusion and inclusion criteria were based on the following steps:
3.5. Bias Evasion
Bias reflects the influence on the exclusion or inclusion criteria from the author. This can also come from research areas or any particular interest or research focus. Therefore, it becomes essential to mention any bias in an SLR. However, all the retrieved studies were included in this study, as shown in
Figure 4.
3.6. Internal Peer Review
The SLR methodology recommends the addition of research peers to coordinate and verify the process, as per SLR guidelines, for collecting primary studies and reviewing synthesis. Therefore, peer researchers regularly compared and cross-checked the collected studies and data through shared spreadsheets.
4. Related Work
The ‘all field’ search category of the Web of Science (WOS) database search engines seeks to find the given keywords in many fields, including title, abstract, and topic. However, the search results against the query “UAV + (AND) Systematic Literature Review” did not retrieve any single article for the search query. Henceforth, this is the first SLR on autonomous path planning of UAVs as per the search criteria mentioned in the review protocol.
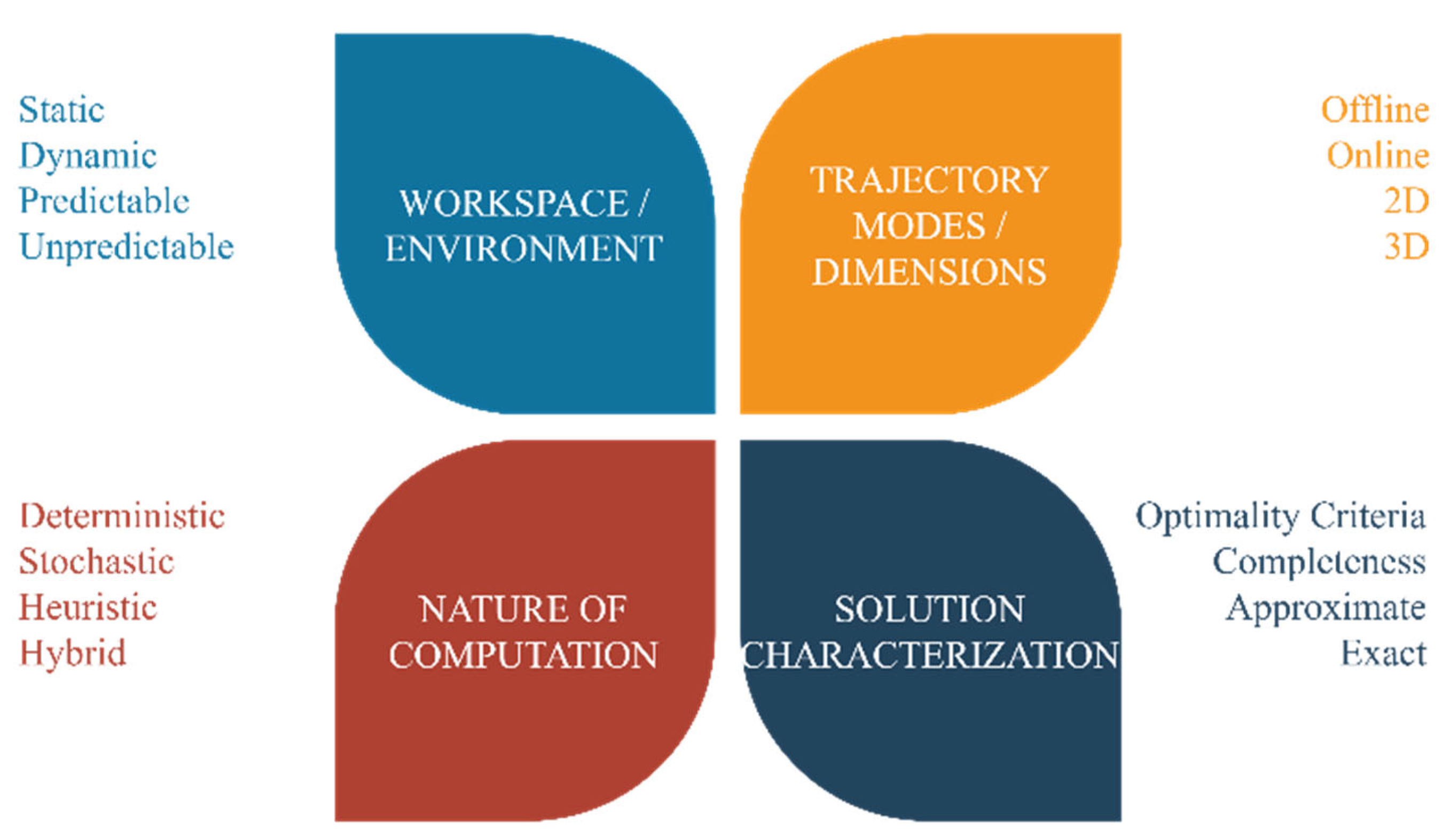
5. Review Parameters and Synthesis
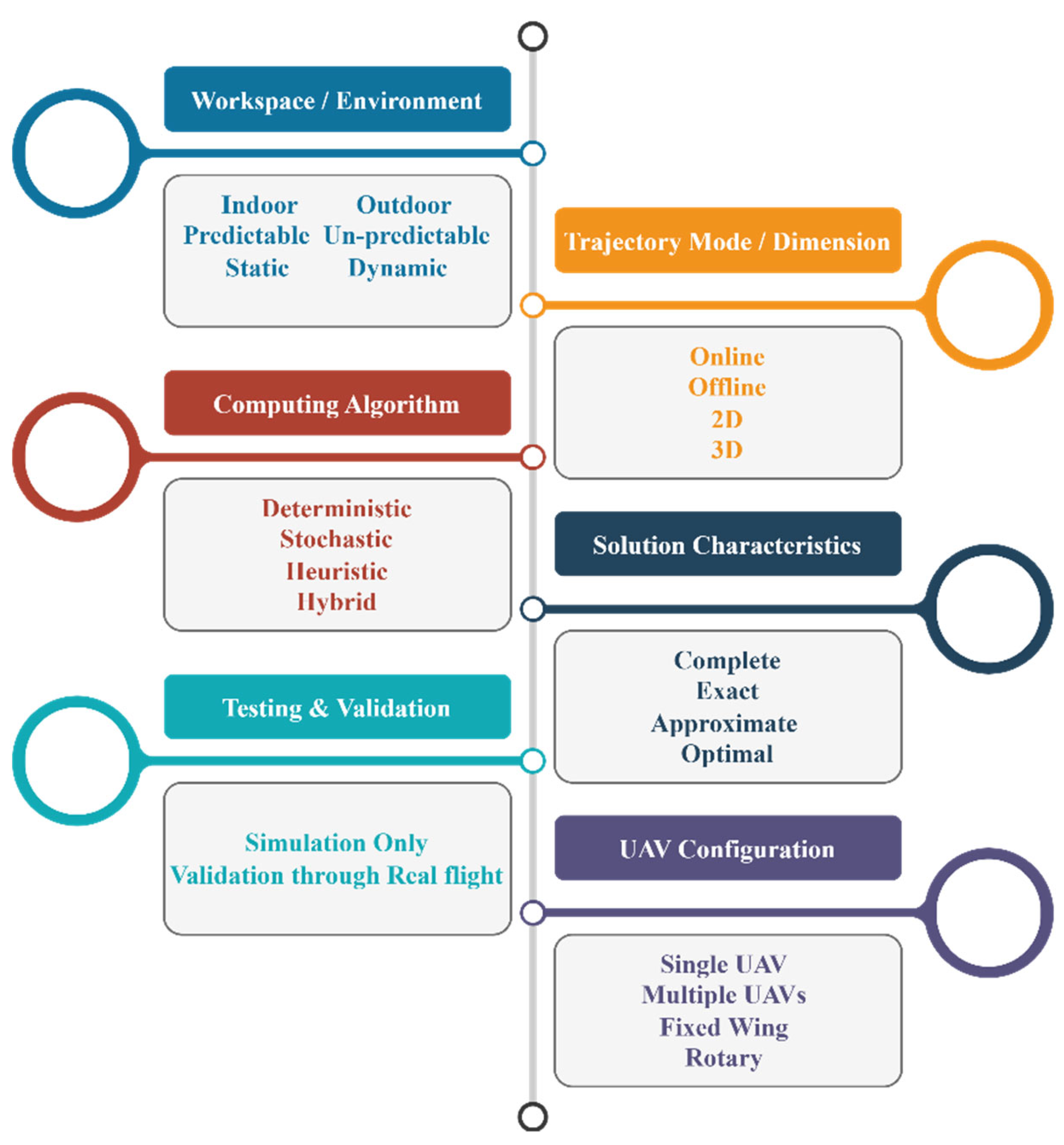
Ninety studies were filtered and distributed to the reviewers to be reviewed independently according to the parameters shown in
Figure 5 that were identified through certain aspects of a UAV application and research. This study covers six diverse aspects: UAV’s workspace or environment, type of UAV’s design, flight configurations, nature of path computing algorithms, and type of solutions they offered. However, the parameters are not limited to only these. Furthermore, the findings from the literature were organized into six groups with their parameters and percentages. The primary studies were skimmed through independently and assorted according to 20 parameters in a spreadsheet. To ensure consistency in reviewing the primary studies, results were shared with peer researchers periodically to confirm and validate.
5.1. Metrics for Workspace and Environment Configuration
The workspace or environment directly influences the algorithm’s complexity governing the UAV’s path computations. The most challenging factors in an environment are its size, the nature of obstacles, whether dynamic or static and their predictability. However, addressing the workspace complexity was not a concern in some studies. Therefore, those have not been listed, while the rest are summarized in
Table 1.
5.2. Trajectory Modes and Dimensions
Adding an extra dimension adds a significant computing constraint to onboard path computing resources. Therefore, it was thought to be helpful to add this category so that readers can pick from
Table 2 according to their trajectory preference.
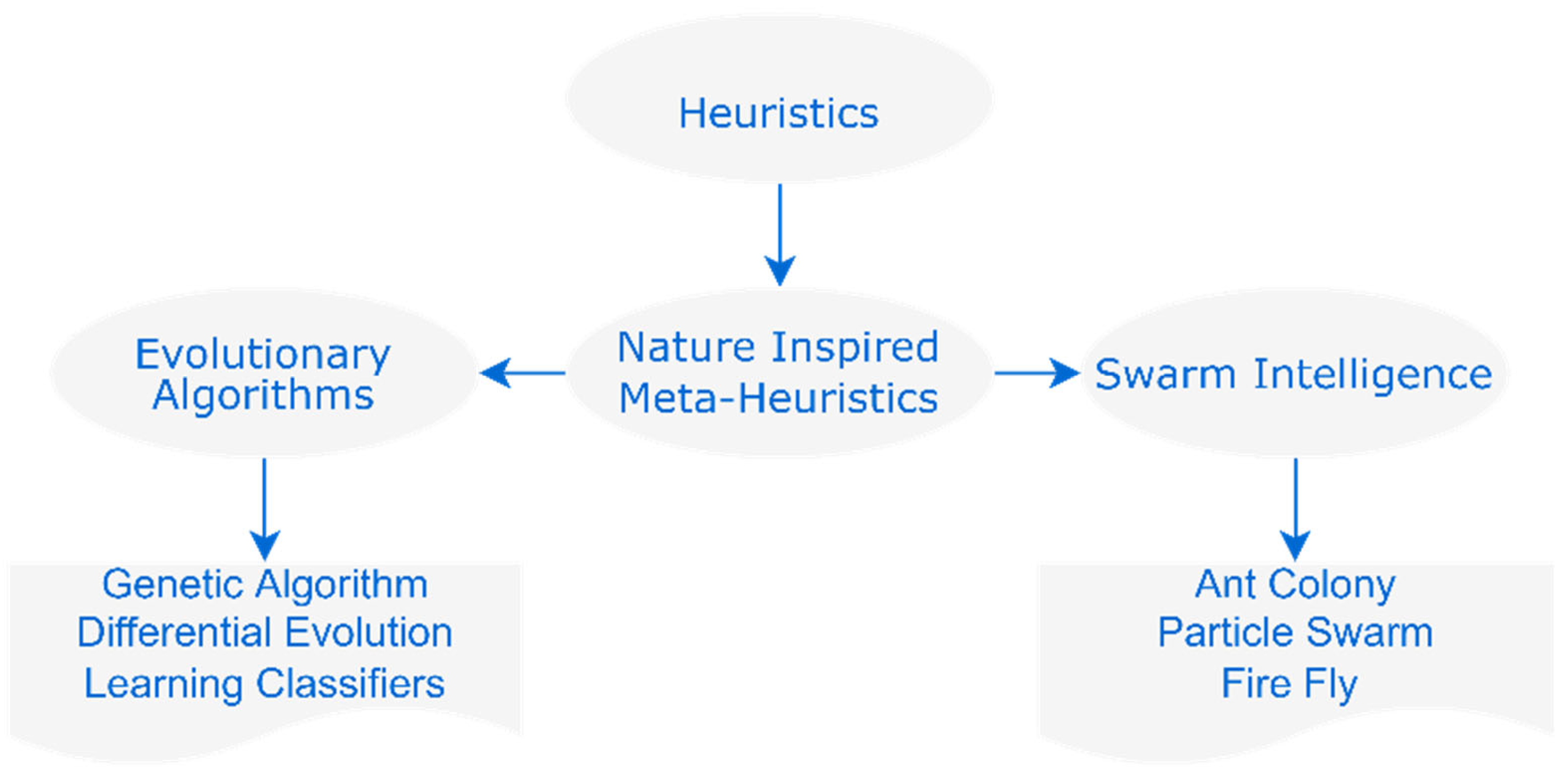
5.3. Nature of Computation
Many path-planning solutions studied in the literature combine heuristics and deterministic or stochastic methods. As these computing modes are fundamentally different, it is suggested that an algorithm’s computing nature should be assessed based on the nature of the dominating component of an algorithm. For example, the well-known particle swarm optimization is initially based on randomness and starts to converge at a specific point; however, it is regarded as a meta-heuristic approach because of the conditions that help the method to converge. Hence, it is graded as a meta-heuristic approach rather than stochastic alone. However, this may also be regarded as a hybrid algorithm. The generalized illustrations are shown in
Figure 6, demonstrating the meta-heuristics possibility.
As mentioned, a computational algorithm can be deterministic, stochastic, or heuristic. Deterministic algorithms guarantee an exact solution that may or may not be optimal based on the model selection. Stochastic and heuristics can solve more complex problems whose solutions are usually approximate and optimal in general.
Table 3 presents references based on the nature of the computation.
5.4. Solution Characterization
Due to the arbitrarily complex nature of specific path planning problems, there appears to be a trade-off among the solutions choices. These include completeness, speed, exactness, approximate, optimal, sub-optimal, etc. Therefore, these may sometimes become necessary conditions to hold, and researchers may look for them from
Table 4. In the ‘optimality’ row of
Table 4, only those studies are cited where the researchers considered optimality a necessary part of their path-planning solution.
5.5. Testing and Validation
Generally, a solution is preferred to meet certain computing constraints that may be conducted within the simulation frameworks rather than validation through hardware. However, some researchers prefer hardware validation. Based on this idea,
Table 5 distinguishes between studies with and without hardware validations.
5.6. UAV Configuration by Flight & Design
The structure and formation of UAVs in action mainly depend on mission objectives and applications. Therefore, we offer a summary of this need, presented in
Table 6. However, some work addressed problems irrelevant to the UAV’s structural or flight configurations.
6. Research Directions (RD)
6.1. RD1: Research Sectors and Challenges in Autonomous Path Planning
6.1.1. Research Sectors
While reviewing primary studies, it was inferred from the specific problem domains in autonomous UAV research. Four distinct research sectors, each had four more sub-sectors, were established to identify a research stream, as presented in
Figure 7.
The driving factor for the first research sector comes from the complexity of the workspace or environment. The more complex the environment is, the higher efficacy of the computational algorithms would be needed. Or, interchangeably, it can be put like this: the higher the complexity, the greater the performance would be; hence, establishing a parameter to measure the extent of UAV autonomy. Second is the trajectory of the UAV, whether it is generated offline, online, 2D, 3D, or a combination of these. Third and fourth are the nature of computing algorithms and the solutions they offer, respectively.
The nature of computing algorithms is essential; for example, heuristic algorithms would demand a higher computational requirement because the solution they offer must be complete. Accordingly, such algorithms are also graded as exhaustive; for example, a grid-search algorithm on a 2D map that goes through every location to reach the goal. Another stream of algorithms falls under the stochastic nature, with the element of randomness in their search. This would iteratively improve the solution till it converges on one. Therefore, if the nature of a computational algorithm is already known, a tentative perspective for the solution may also be perceived. Hence, viewing the literature with these aspects or classifying it in these perspectives may help and serve the process of reviewing the published research more efficiently.
6.1.2. Current Challenges and Significant Contributions
This part of the work highlights some significant contributions under open research challenges; however, it is not limited to the following studies.
One of the challenges, particularly for learning-based technologies, is a large and dynamic environment in which the computational requirement of training is arbitrarily high. This challenge remains open, and some recent approaches are presented.
- ⚬
Machine learning-based approaches:
In machine learning techniques, the training overhead can increase for larger environments. One of cited works [
9] demonstrated that deploying multiple homogenous UAVs could be decentralized with centralized training. Considering larger environments, this approach reduces the training overhead. In reinforcement learning, an agent must explore or exploit an environment. Focusing on reducing the training time, the work presented in [
24] offered a deep RL-based methodology to reduce meaningless exploration in large workspaces. However, the risk of reducing the exploration may affect missing the valuable data, as it might have been left meaningless and may lead to an inefficient global path. To address this problem, the research by [
69] proposed a solution by establishing an upfront information structure that is incrementally updated during the exploration. Another unique approach was presented by [
9] in which the intent was to imitate the environment as closely as possible to reality using gaming engines. The simulated climate should offer sufficient data to train ML agents. Once trained, agents with pre-learned experience may exhibit the desired performance.
- ⚬
Efficient Mapping Techniques:
Another way to address the problem of large environments is efficiently mapping the environment for the computation-friendly navigation of UAVs. One such effort was presented by [
64], where a mapping framework comprised three layers: awareness, local, and global. This study is also offered as an open source for the research community.
One or more UAVs in a swarm or collaboration structure might generate an incorrect perception, leading to critical mistakes in path planning or decision-making. This usually occurs for numerous reasons, such as sensor inefficiency, noisy communication, data lag, or loss. Ref. [
22] proposed the use of cooperative UAVs to track and localize intermittent radio frequencies. However, ref. [
34] attempted to solve it through a cooperative perception approach for a group of UAVs; however, this solution is at the stage of proving its concept and remains open. Similarly, ref. [
88] presented a solution for cellular-connected UAVs to manage their interference based on the optimal path, transmission power, and associated cells. Another domain under this category is UAV-to-UGV cooperation, where either or both assist the other in carrying out a ground or aerial operation. Another notable attempt was made by [
45,
72], that also attempted to settle the coordination problems among heterogeneous unmanned systems. However, both efforts were successful efforts to localize the sources of radiation using different approaches though.
The challenge of collision avoidance in a highly dynamic environment and tracking has many applications; therefore, it is significant. A novel control framework in this regard was proposed by [
81] that decomposes the task into subtasks and efficiently transfers the pre-learned decision-making capabilities of a UAV to track a moving target. There has also been another notable contribution based on robust control where a 250 gm quadrotor, equipped only with a monocular camera and IMU, was able to perform aggressive flights, developed by [
49]. The quadrotor recorded a speed of 4.5 m/s with accelerations over 1.5 g roll and pitch angles of up to 90. Hence, set a high-performance benchmark for autonomous trajectory generation.
Proximity inspections in cluttered environments are among the open challenges, and some excellent solutions have been offered. A deep learning-based technique was crafted by [
82] for the object detection and localization of a target through multi-sensor fusion. The mission objective was to carry out proximity inspections. This technique does not require prior information regarding the environment. Another approach, developed by [
89], is a distributed deep RL framework that divides the navigation tasks into subtasks and solves them individually. The sub-solutions were integrated to establish the navigation paths to avoid data loss through a data-loss computing function.
In a disastrous situation, the collaboration of UAVs with heterogeneous groups of robots with objectives like search and rescue, search, and track, establishes an ad-hoc communication network that is critically essential. Such robots’ real-time information exchange and coordination come with strict timing constraints. A simulated collaboration between as fixed and rotary wind was developed by [
71] to identify victims in a disastrous scenario. The data were taken from the Haiti earthquake in 2010, and it was claimed that the presented technique was 25% efficient compared to the state-of-the-art.
Similarly, another such coordination was performed by [
72], where a coordinated mission was performed using a UAV and a UGV. The purpose of UGV was to search for radiation hotspots. At the same time, UAV was utilized to capture and process aerial imagery data into object identification like roads, buildings, vehicles, grass, and shadows from the images. The information was further passed to the UGV for its navigation.
6.2. RD2: The Measure of Autonomy among Autonomous Systems
An arbitrary question has been coined over the years regarding the extent of being autonomous for an autonomous system. Different models have been proposed, and it is an arbitrary stage to comprehend because of the increasing abilities of artificial intelligence. One such model was proposed by the National Institute of Standards and Technology (NIST) and is known as ALFUS (Autonomy Levels For Unmanned Systems), illustrated in
Figure 8 [
90].
According to this model, the operator to UMS (Units of Meaningful Semantics) ratio refers to the ratio of the number of control or command operators used to control the unmanned system, to the number of UMS units required to achieve a desired outcome. This ratio is used to determine the level of autonomy of the unmanned system, with a higher ratio indicating a higher level of autonomy, as the system requires fewer control operators to achieve its goals.
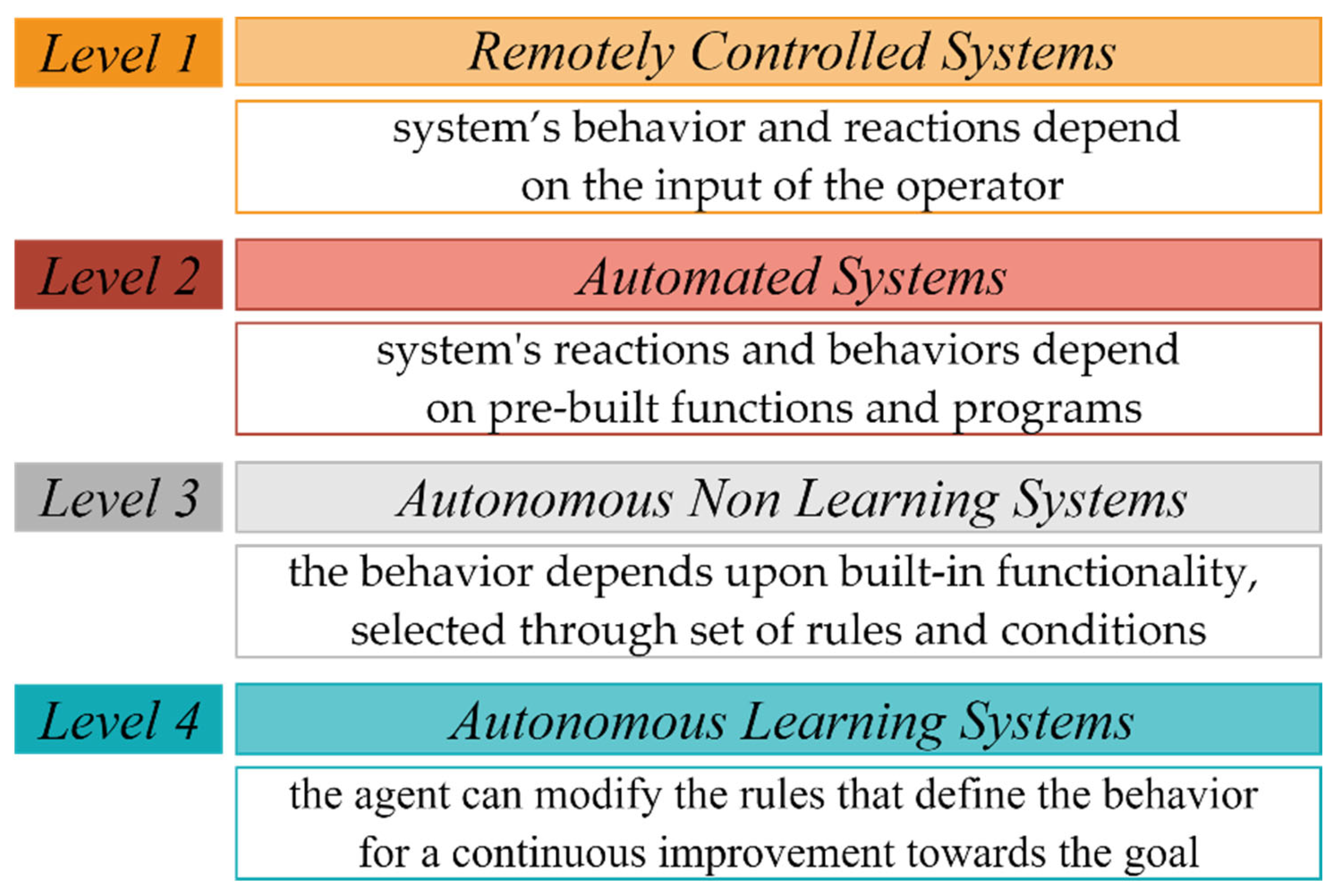
Other than the ALFUS model, North Atlantic Treaty Organization (NATO), a military alliance, published a pre-feasibility study for autonomous UAV operations [
90], where the autonomy was graded into four levels, as depicted in
Figure 9. These levels provide a standardized framework for evaluating and comparing the level of autonomy of unmanned systems across different domains and applications.
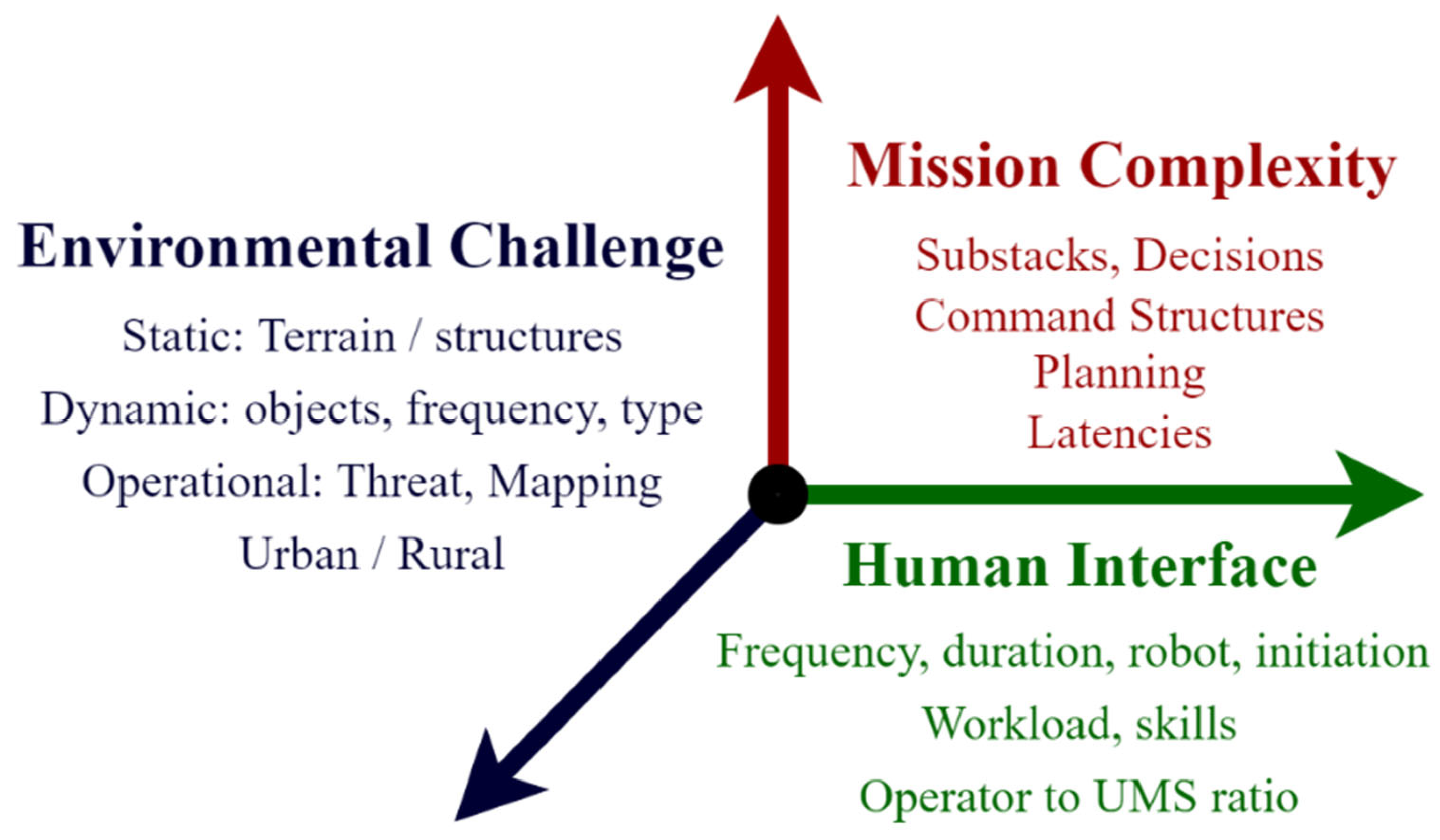
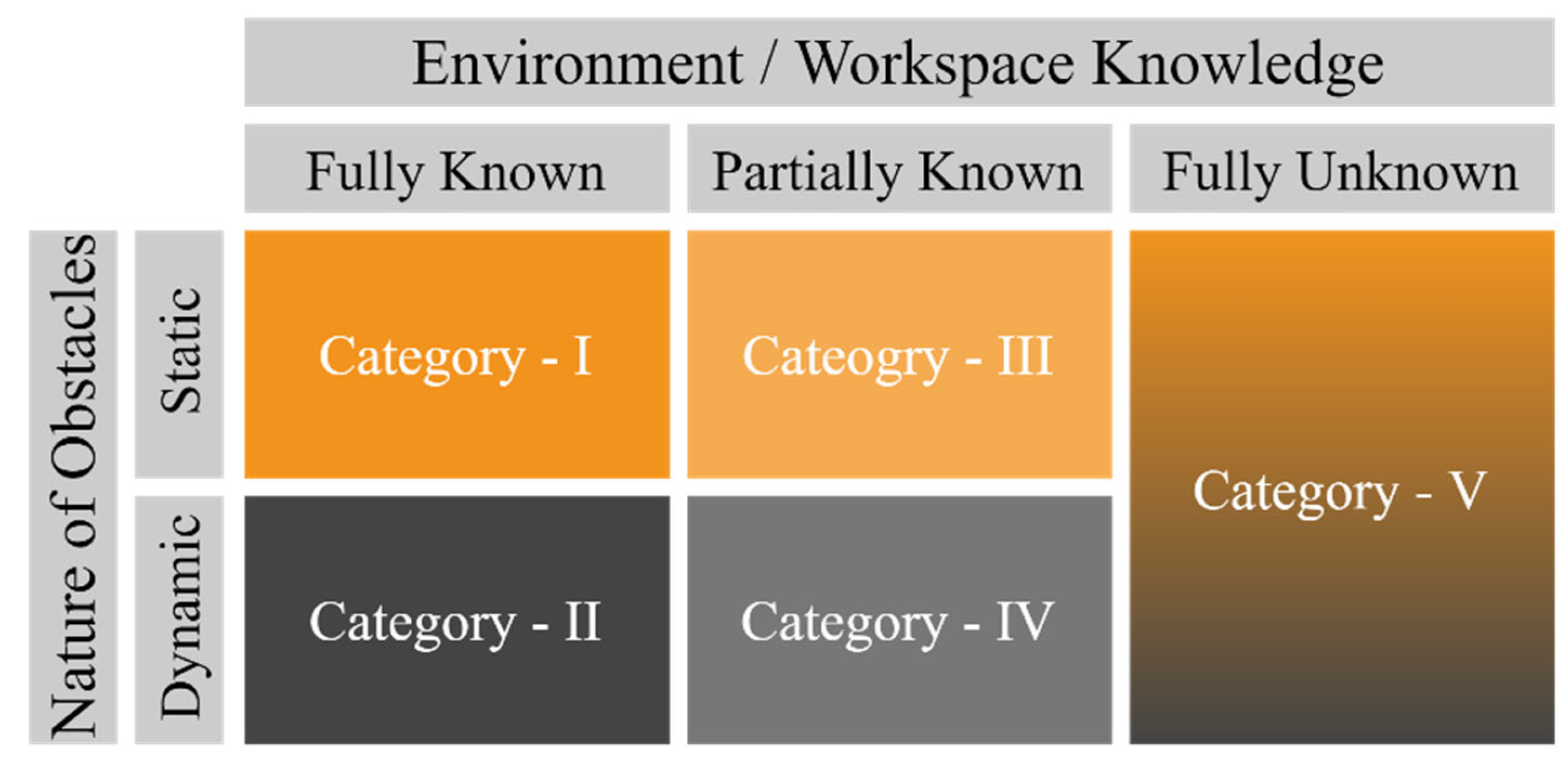
However, if we further ponder the possible complexities and dynamics of an environment, an autonomous system and the amount of information available to the system play a crucial role in the extent of autonomy. Therefore, a novel approach is presented in this study that is based on the nature of the UAV’s environment. A complexity matrix is presented in
Figure 10. It is stated that any autonomous UAV operating successfully in an entirely unknown workspace should be regarded as operating at the highest level of autonomy.
This offers a choice to see autonomy through the complexity and nature of obstacles in the environment or workspace of the unmanned systems. Though the measure of autonomy is not restricted only to this perspective,
Figure 9 and
Figure 10 are offered here to express how complexity and autonomy go hand in hand with the futuristic applications of unmanned systems. The readers are invited to walk through this gateway of research direction, and the scale to the true or absolute measure of the extent of the autonomy in unmanned systems is yet far from clear.
6.3. RD3: Employed Technologies
Dedicated open-source and closed-source projects have been observed to work independently or collaboratively to address a specific set of UAV applications. A few leading platforms, summarized in
Table 7, were collected from the literature used in drone research. As evident from
Table 7, MATLAB and Robot Operating System (ROS) have been the most dominating platforms for UAV’s path simulations, followed by V-REP for environment mapping. The rest of the software included Kestral, Air-Learning, Unreal Engine (UE), QGroundControl, and ArduPilot. Among the hardware controllers for UAVs, PIXHAWK was used by most of the researchers. The rest included HK Pilot, Raspberry Pie, ODroidXU, and Beaglebone.
Though all these resources are mentioned here to help readers with the selection of various platforms used by many, a unified ecosystem dedicated to autonomous unmanned systems is still required in which different standards and regulations can interoperate. ROS, one of the leading platforms for programming autonomous, heterogeneous robots, has been working on and developing the project through an open-source believing ROS community. ROS is a standing-out candidate where the challenges in the interoperability of autonomous robots can be handled.
6.4. RD4: The ‘Explain-Ability’ in AI Decisions (XAI)
As discussed in RD1, ML-based methods are the largest contributors to solving autonomous path-planning challenges, and a fundamental critique of the ML technique is worth mentioning here. Researchers have posed questions regarding the reasons behind decisions made by machine learning (ML) algorithms. As ML models are trained over massive datasets to obtain better approximations, estimations, or classifications, this has led to a question on the inconsistencies while fitting the data curves, especially in precision-critical decisions. Researchers want to measure the level of trust behind a machine’s decisions. Thus, tossing a new coin that a machine should be able to explain the reasons for the inconsistencies in its decisions, which is Explainable Artificial Intelligence (XAI).
XAI suggests modifications to existing ML architectures that may offer reasons or explanations behind its decisions. XAI also promises to make these reasons visible to the user, proposing a Whitebox process. The U.S.’s Defense Advanced Research Projects Agency (DARPA), although in the development phase, currently leads this project. This can be expected to be a potential replacement or modification of the current ML architecture [
91]. Identifying and addressing the same problem of explain-ability, an open-source framework named ECCO, a python library for explaining Natural Language Processing models, has been launched [
92]. This comprises a set of tools that help to capture, analyze, and explore the inner mechanisms of machine learning. However, this toolset is limited to natural language processing (NLP) applications and neural network architectures.
7. Discussion
It is important to mention that UAVs and Unmanned Aircrafts (UAs) fall under Unmanned Aerial Systems (UAS). Therefore, the directions provided in this SLR, for instance, the nature of computing algorithms and the type of solutions they offer, can also facilitate the researchers seeking the literature resources for UAS and UAs. One of the key strengths of the SLR methodology is that it recommends future work as a continuation of an existing one. Since this study covers a broad range of parameters for literature synthesis, presented under
Section 5, alongside highlighting the key research sectors under
Section 6.1, by citing the literature only for UAVs. Therefore, it is recommended as one of the future works for researchers to establish an SLR on UAS to cater other forms of autonomous systems under systematic reviews as well.
We believe that the methodology to examine the literature on robotics, specifically UAVs, can be improved by proposing a parametric approach that can offer a cross-sectional view of the primary studies. The rationale behind this confidence is that the role of AI and Robotics in multi-disciplinary research has increased more than ever, due to which the amount of research published each year only related to UAVs is exponentially rising. Moreover, while searching through online databases, the search queries and their combinations for a specific set of primary studies must be kept generic to fetch good results. Therein, adding more keywords tends to curtail the results, which is undesirable.
The research subjects like UAVs have numerous distinct aspects, from their design philosophies, flight configurations, path planning algorithms, and types of onboard computing resources to the nature of their environments to be deployed. Multi-disciplinary research applications often demand critical conditions to hold. These conditions can include the sensory perceptions of robots of their environment, path planning limitations, and the nature of robust solutions. Therefore, looking through the literature with these perspectives has been made possible with the literature synthesis phase of this work.
There has also been a debate for quite some time on the extent of the UAV’s autonomy. Although this arbitrarily complex goal is still unclear, autonomy has always been observed as a subsystem, primarily through the measure of human involvement in their flight path. Another perspective that enforces human intervention for autonomous systems is the impact of the size and dynamics of a robot’s environment on the usefulness of the information from the environment. A highly efficient autonomous UAV can get challenged in an unknown cluttered environment with randomly flying objects or obstacles. Therefore, a parallel perspective offered in this study helps the researchers see autonomy through the dynamics of a robot’s environment rather than entirely as the robot’s ability.
We, at this stage, speculate what can be an expected higher level of intelligence considering the current state of the art about the future of UAVs. We infer that soon, AI and robotics will look forward to pre-trained, model-free, and model-based learning technologies to possess the autonomous ability to select those data-processed models that fit the need of their current state, simply stated as autonomous model selections. A preliminary approach to mention in this regard is the efficacy of transfer learning technology for a distributed swarm of robots where the experience of a single entity from its surrounding can share the experience with the peers in that swarm. Hence, we look forward to more rapid and runtime training technologies that may open the doors to deploy robots in unknown dynamic environments. However, at this stage, training the robots in unfamiliar workspaces demands quite a lot of data at the deployment stage and computational resources.
We learned that the umbrella of machine learning technologies is expanding, especially for autonomous technologies. However, despite ML algorithms performing well across many fronts, there is an ongoing debate on the explanation of its decisions, the XAI factor. Explaining AI is an emerging area of research to establish trust in its decisions. This came with new gateways for research challenges, primarily when it becomes known why a machine learning algorithm does not pick a specific competitive solution.
Through this work, we have observed that independent platforms for UAV research are being established, irrespective of their scopes. This stresses the dire need for integrated consortiums on global level regarding the standards and regulations for civilian applications. We also believe that accepting UAVs on social and governance levels will be a great challenge that needs to be addressed. The social implications and the need for policies would require consortiums from social sciences and technologies to address this unattended aspect of UAV research.
Lastly, it is important to mention the limitation of this work. As engineering disciplines have just started to adopt systematic reviews, this work comes up with limitations for using statistical or formal methods in data collection, bias removal, and others, as mentioned in PRISMA 2020 checklist [
2]. The work was carried out independently among the reviewers, and findings were validated periodically to check for inconsistencies, errors, or omissions that might be expected due to human nature.
8. Conclusions
The adaptation of systematic reviews for engineering disciplines started to gain acceptance because of their crucial requirement of transparency and an objective approach to reviewing the literature. Therefore, this work reviews a set of 20 application-oriented parameters organized into six distinct categories through the SLR methodology. The categories are workspace/environment metrics, trajectory modes and dimensions, nature of computing algorithms, characteristics of the solutions, path validation through simulation or hardware, and UAV’s structure and flight configurations. It is concluded to discern UAV’s research knowledge regarding the fundamental differences in its subfields. It is an opening for the researchers to establish novel knowledge streams under UAV research. The extent of autonomy for the robots has always been under speculated questions regarding their future, so it was investigated if there is any process or method available to measure it. The model proposed by NATO was cited, and a fresh approach perspective to explore this problem has been presented to observe the extent of autonomy based on the types of UAV environments. This perspective can tap into some overlooked aspects of autonomous robot research. A segment of the article was dedicated to presenting the top-notch research and development platforms and the technologies identified through literature to offer a jump start for young researchers. Their work in terms of tools n technology selection. It is important to mention the Robot Operating System (ROS) that possesses an unparalleled and promising future because of its scalability and futuristic integrability with heterogeneous robots. UAV’s research currently is facing technical challenges to enhance the modeling of larger, more complex, and unknown environments through onboard sensors, specifically, the time required to model, effectiveness for the desired application, and coordinated modeling. Coordination among autonomous, heterogeneous robots is also challenging due to the continuous expansion in diversity and differences in robots.
As the applicability of UAVs for remote sensing and inspection missions is increasing, so to is the desire to collect more data from multiple perspectives, objectives, locations, and proximities. As the challenges and the efforts to overcome them are destined to go hand in hand with research, a few are highlighted here to appeal to extraordinary attention. The end of every effort in research is bound to bring opportunities to look further ahead of its time, and it is optimistically stated that this work would serve the need to fulfill this obligation for peer researchers.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}