
High Precision Mesh-Based Drone Image Stitching Based on Salient Structure Preservation and Regular Boundaries



Abstract
:1. Introduction
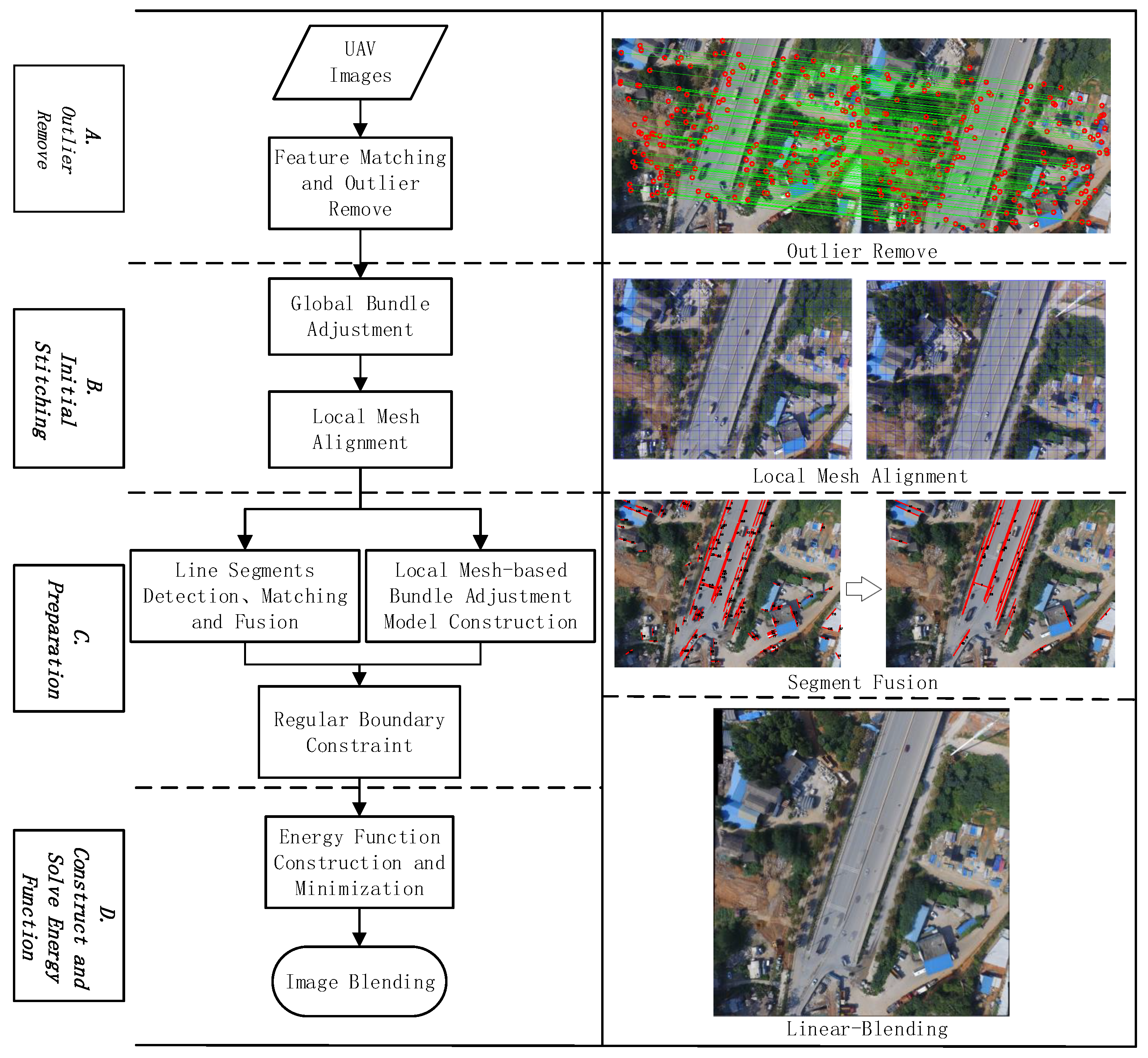
- A novel image-stitching method is designed using a comprehensive strategy involving global bundle adjustment and a local mesh-based alignment model which can reduce the global transfer error through global bundle adjustment, and reduce the local parallax error by constructing mesh-based local feature alignment energy functions.
- New energy functions guided by a global collinear structure are designed to prevent global linear structure distortions and improve the performance of line segments alignment, addressing the decline of stitching quality caused by salient structural distortions. Furthermore, regular boundary constraint combined with mesh-based shape-preserving transform is introduced to obtain more natural stitching results.
- Two new quantitative evaluation metrics of linear structure are developed to quantify the preservation and alignment performance of linear structure for image stitching. Comprehensive experimental results and comparisons show that our proposed method is superior to some existing image-stitching methods.
2. Methodology
2.1. Initial Image Stitching
2.2. Construction of Energy Functions Guided by Double Feature and Structure Preservation
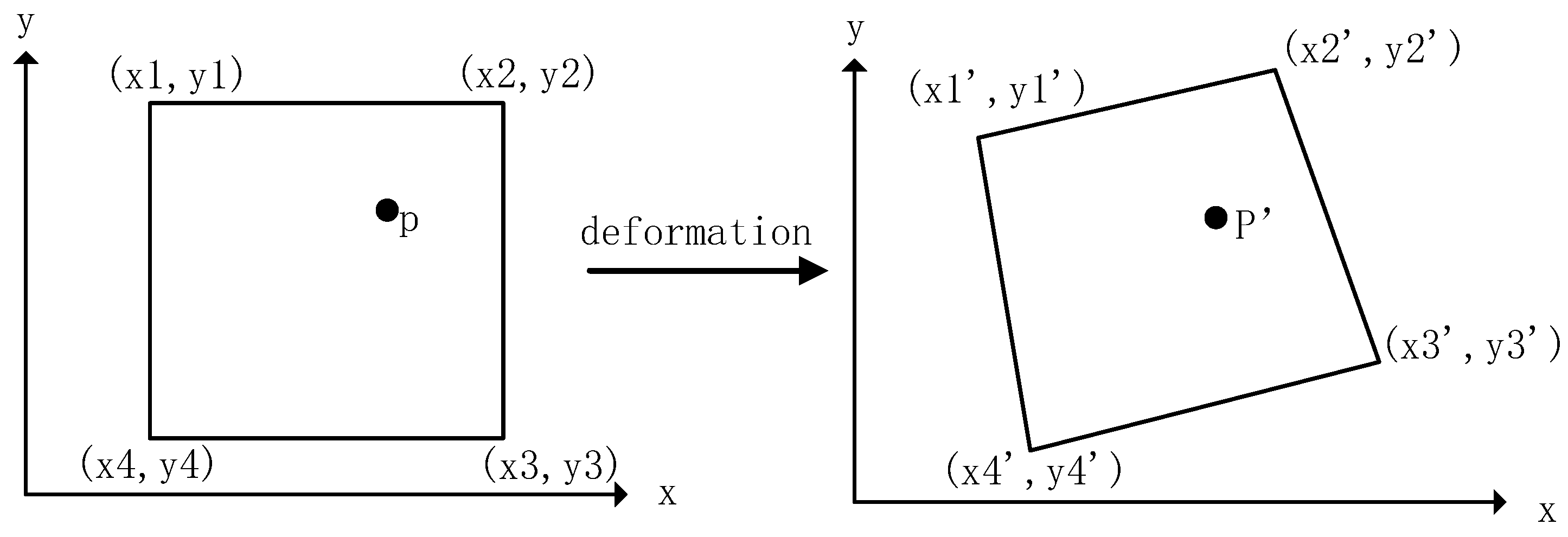
2.2.1. Mesh Optimization
2.2.2. Salient Structure Preservation Term
2.2.3. Alignment Term
- Point Alignment Term
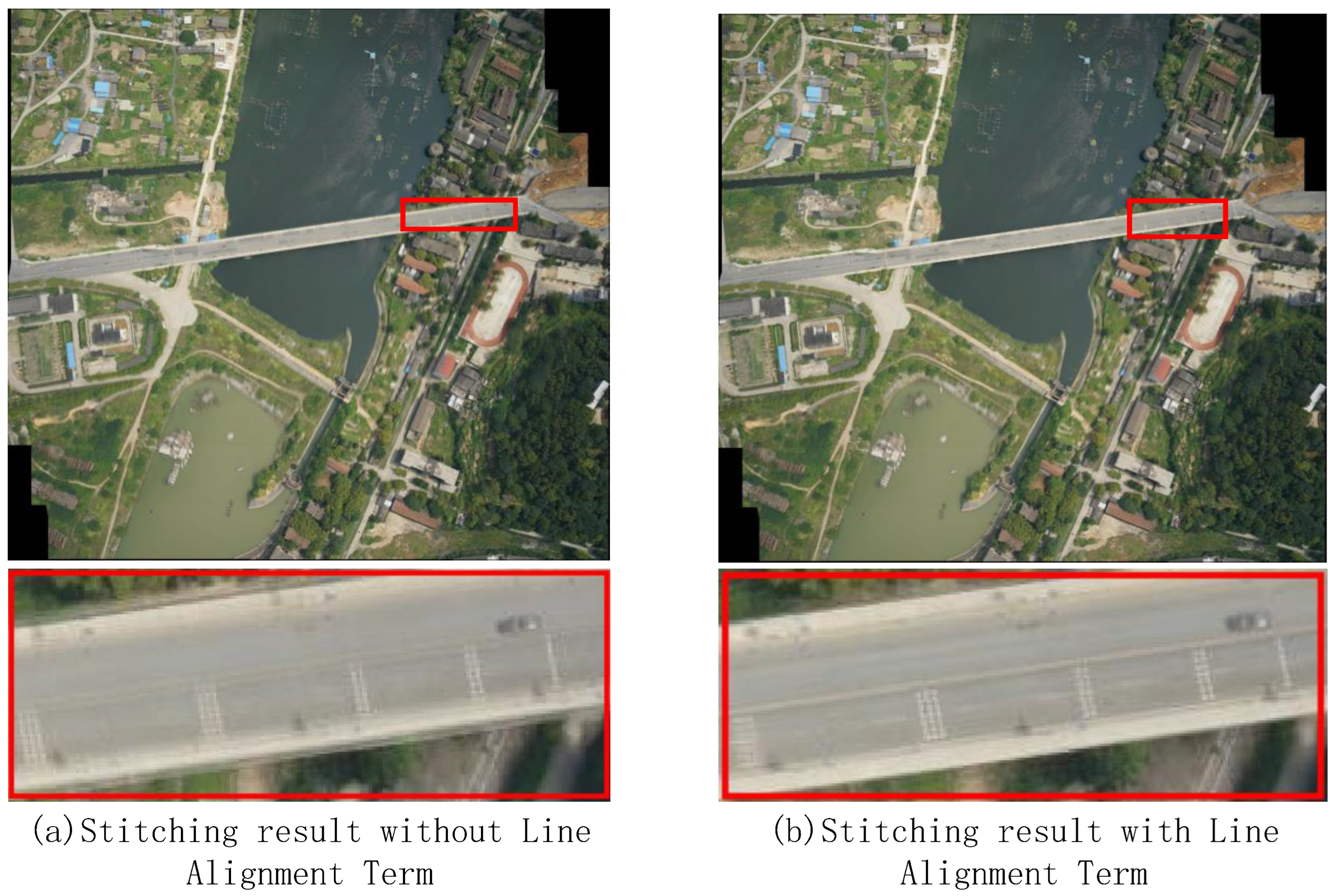
- Line Alignment Term
| Algorithm 1 Find extended line segments corresponding to matching line segments |
| Input: detected original line segments and matching line segments ; |
| Output: the extended line segments corresponding to matching line segments; |
| 1: for do |
| 2: for do |
| 3: if then |
| 4: if and can be regarded as a straight line then |
| 5: merge and into a new line ; |
| 6: |
| 7: |
| 8: |
| 9: end if |
| 10: end if |
| 11: end for |
| 12: end for |
| 13: for do |
| 14: find the index of in the original line segments set ; |
| 15: while do |
| 16: |
| 17: end while |
| 18: the is the extended line segments corresponding to |
| 19: end for |
2.2.4. Global Alignment Term
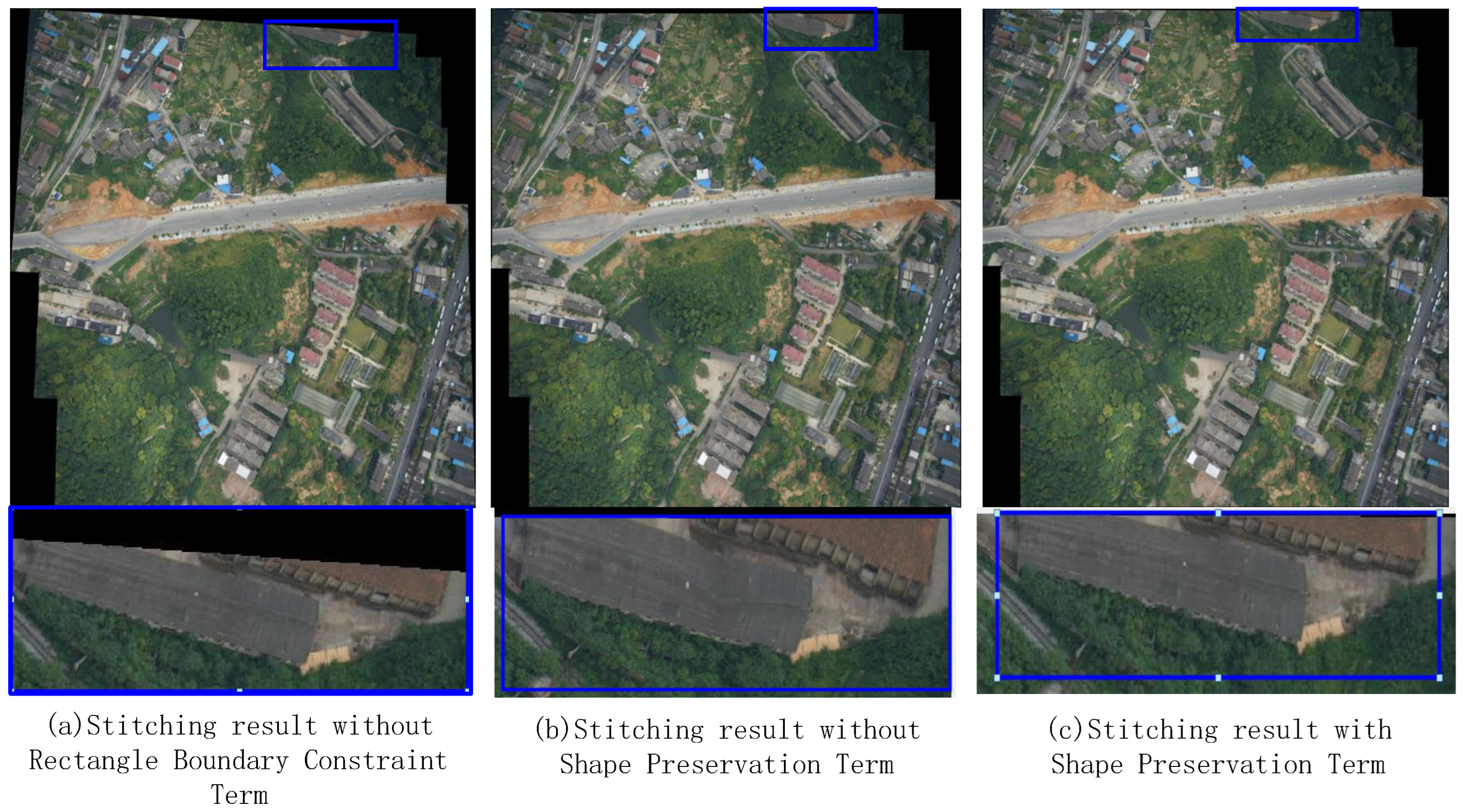
2.3. Regular Boundary Constraint Combined with Shape Preservation Transform
2.3.1. Rectangle Boundary Constraint Term
| Algorithm 2 Algorithm of the Rectangle Boundary Constraint Term |
| Input: Boundary point coordinate set of the pre-warping images , S is the number of input images; |
| Output: Indexes of boundary points and its target value , represent the four directions of boundary points; |
|
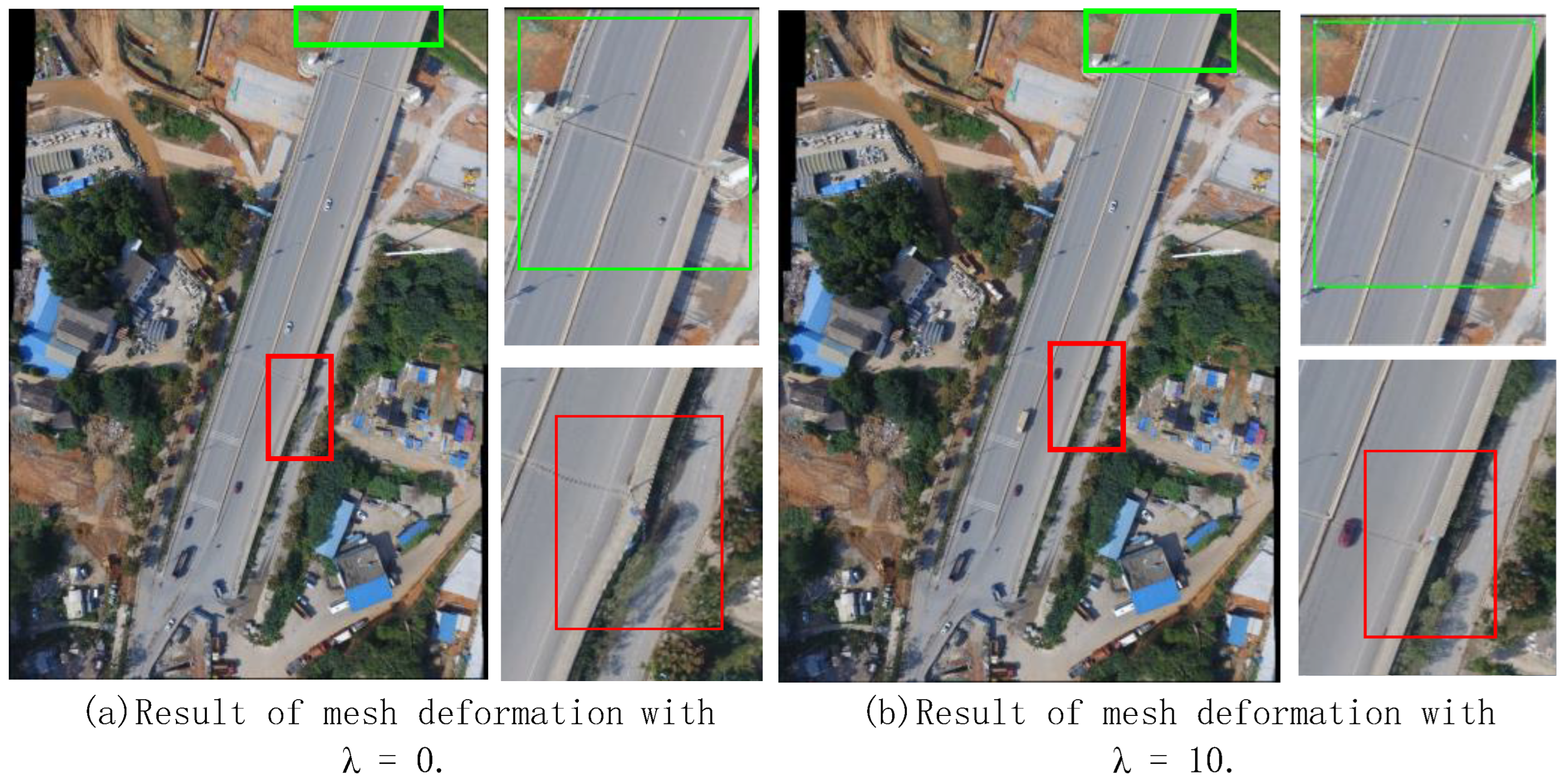
2.3.2. Shape Preservation Term
2.4. Multiple-Image Stitching
2.4.1. Global Bundle Adjustment
2.4.2. Energy Terms under Multiple-Image Stitching
- Point Alignment Term
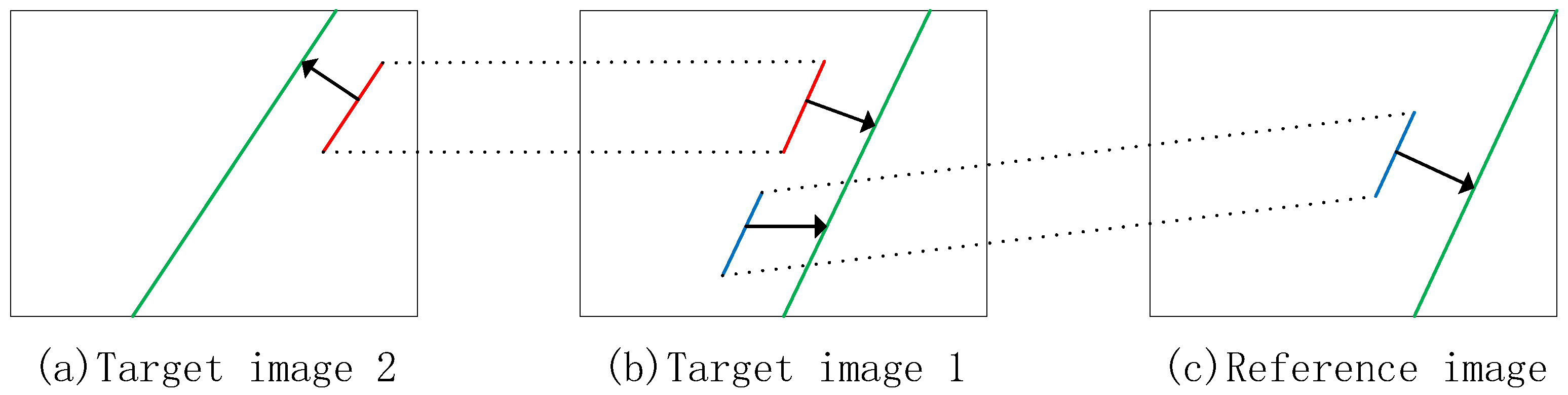
- Line Alignment Term Based on Transfer Thought
| Algorithm 3 High Precision Mesh-based Drone Image Stitching Based on Salient Structure Preservation and Regular Boundary |
| Input: input images with order |
| Output: A natural panorama |
|
3. Experiment and Result
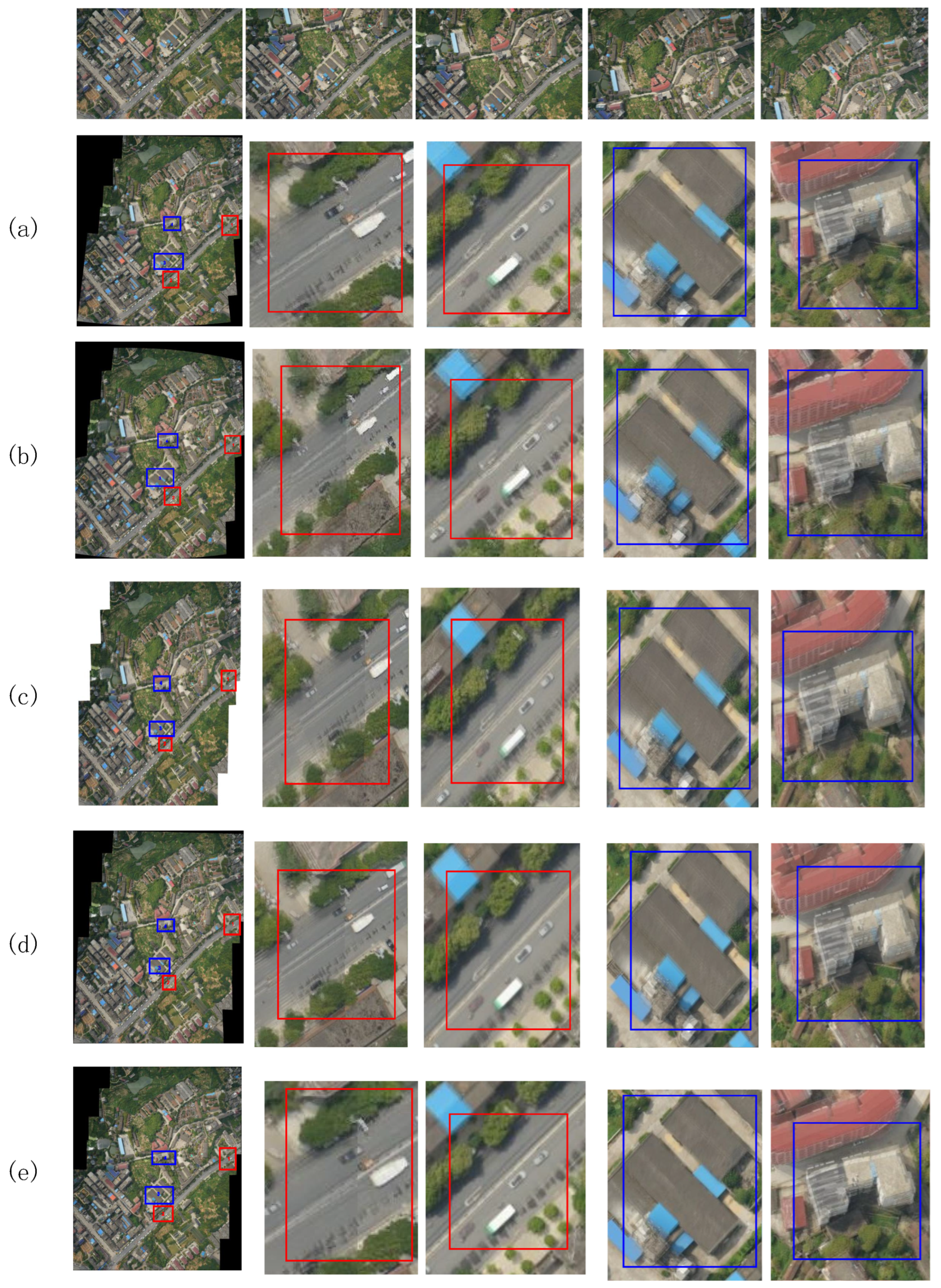
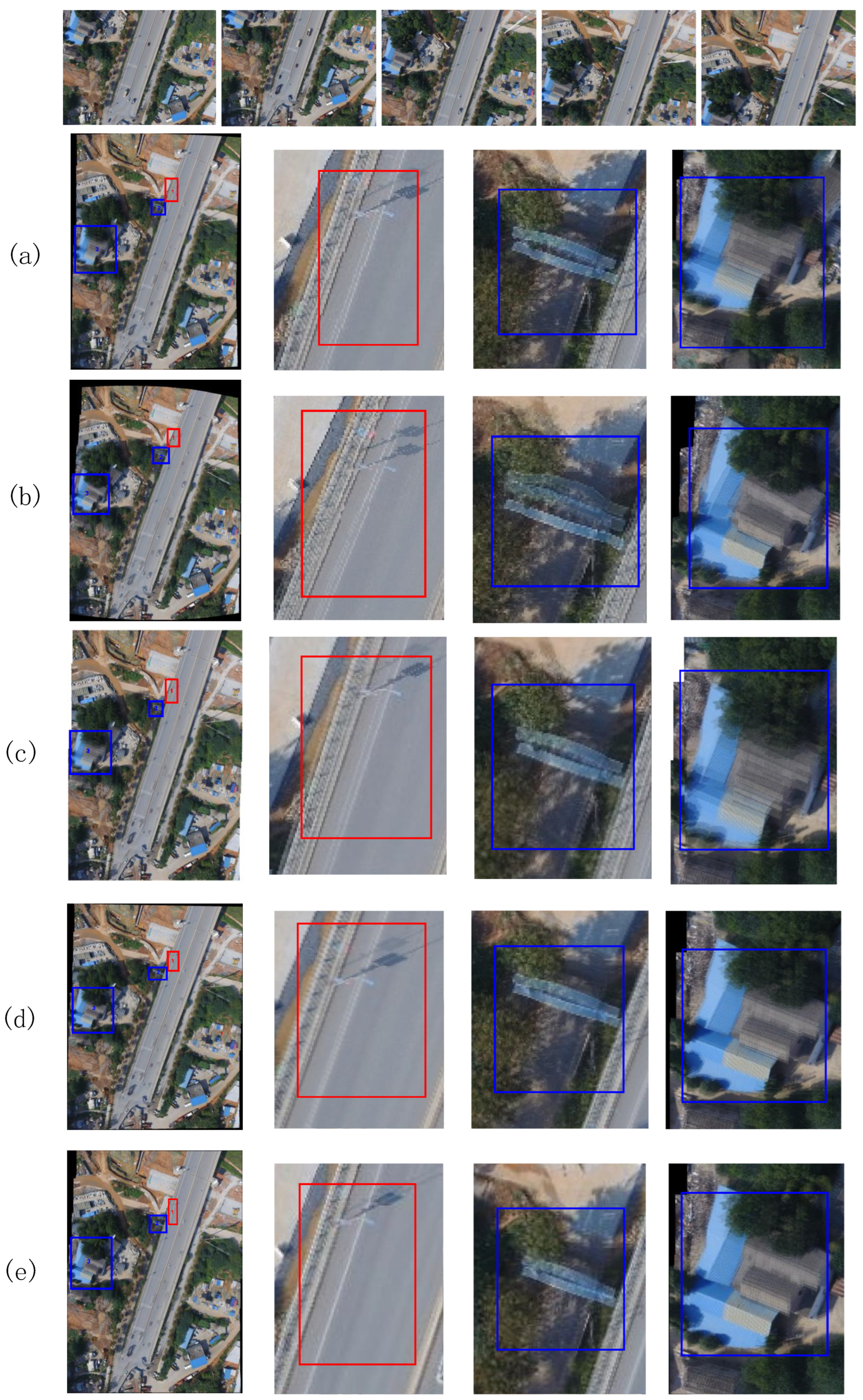
3.1. Comparison of Alignment Accuracy
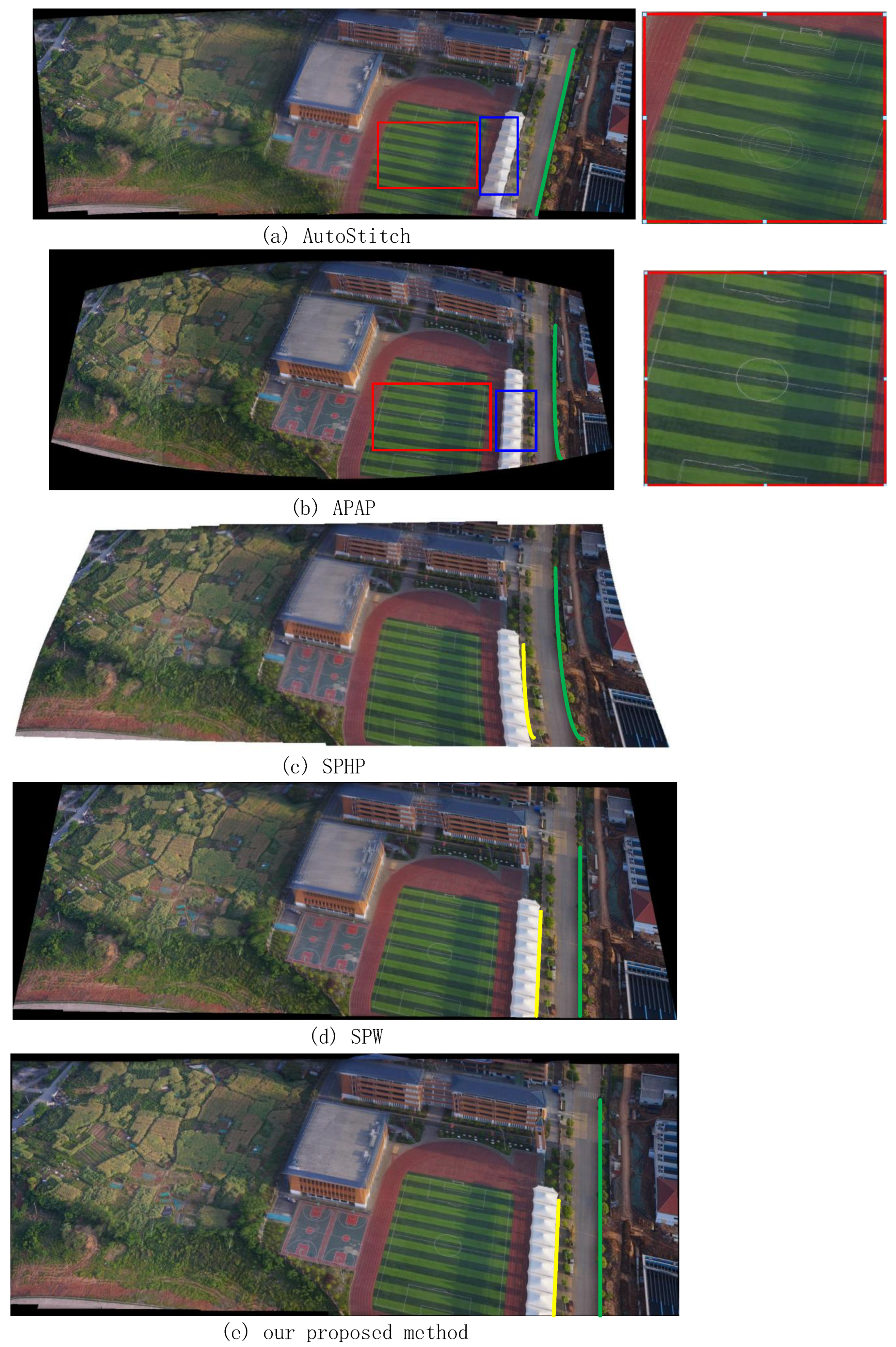
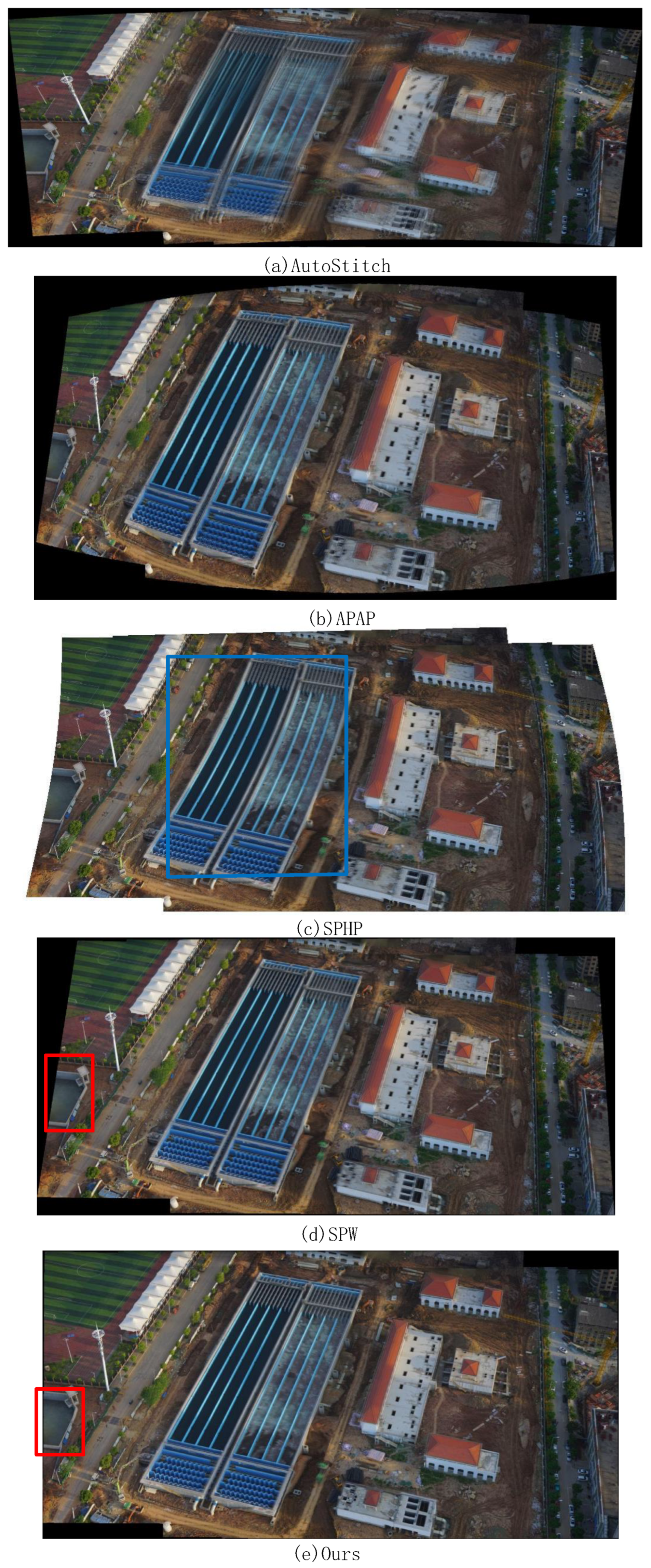
3.2. Comparison of Structure Preservation
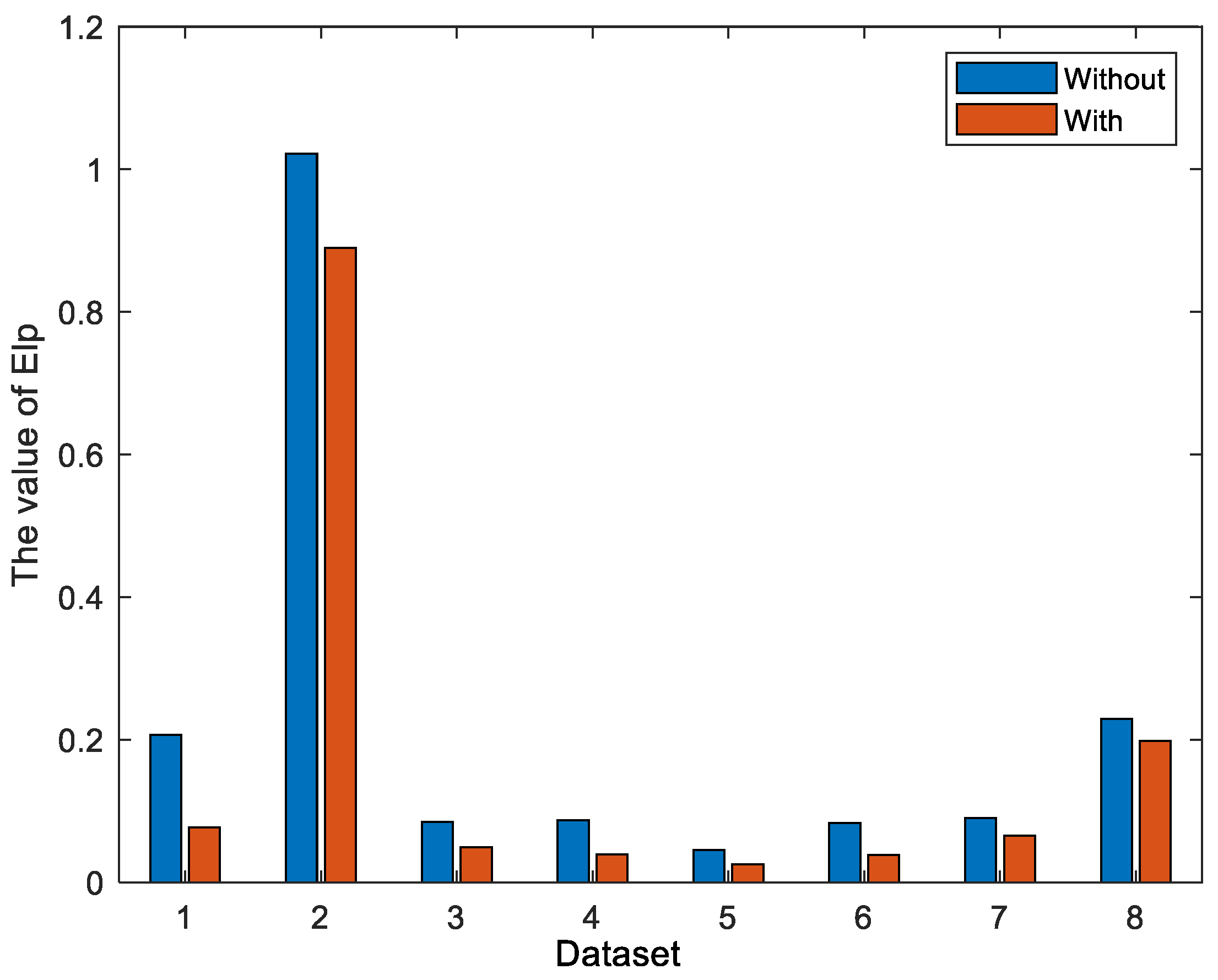
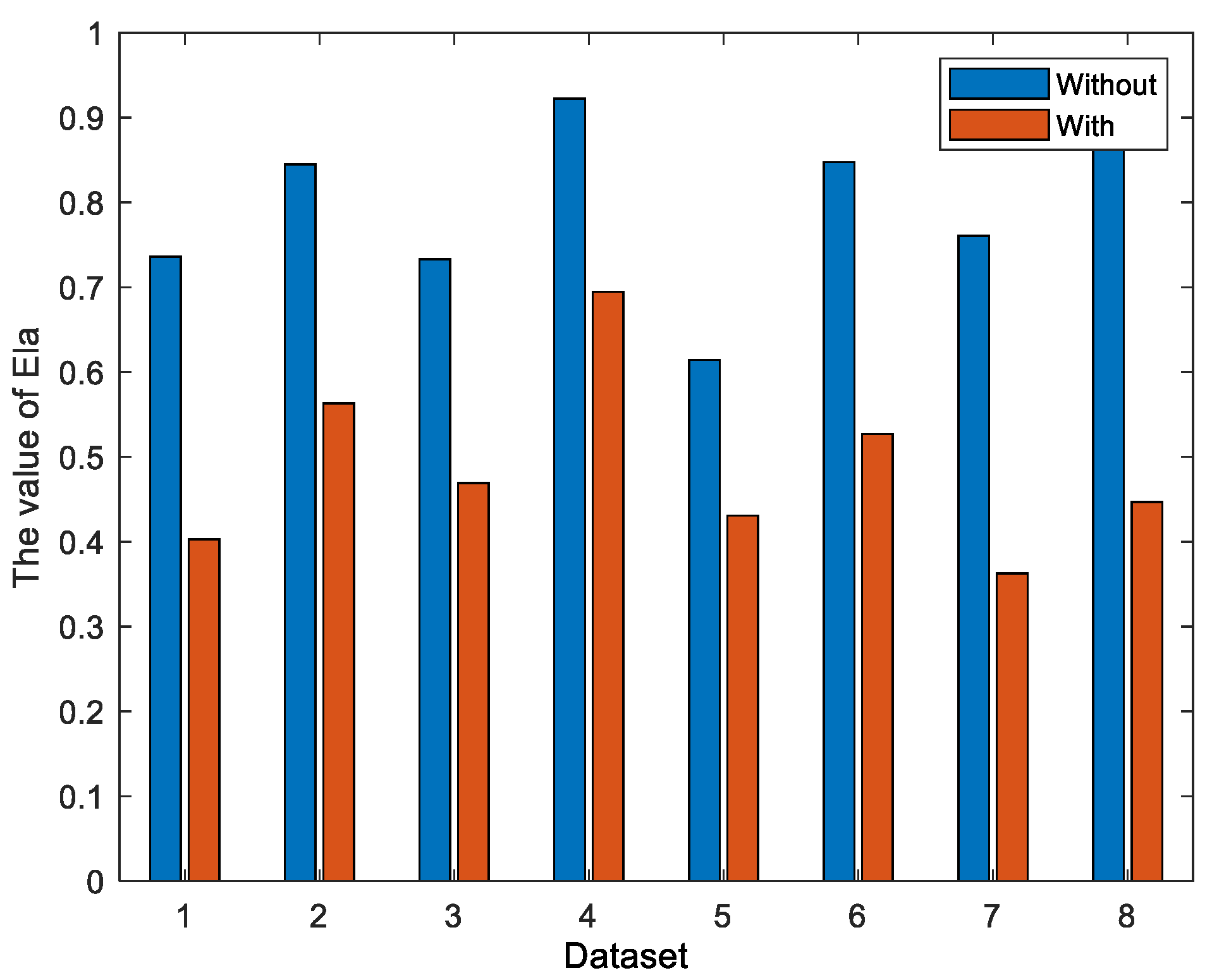
3.3. Quantitative Comparison of Linear Structure
3.4. Comparison of Time Efficiency
3.5. Failure Cases and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bryson, M.; Reid, A.; Ramos, F.; Sukkarieh, S. Airborne vision-based mapping and classification of large farmland environments. J. Field Robot. 2010, 27, 632–655. [Google Scholar] [CrossRef]
- Yahyanejad, S.; Wischounig-Strucl, D.; Quaritsch, M.; Rinner, B. Incremental mosaicking of images from autonomous, small-scale uavs. In Proceedings of the 2010 7th IEEE International Conference on Advanced Video and Signal Based Surveillance, Boston, MA, USA, 29 August–1 September 2010; pp. 329–336. [Google Scholar]
- Ezequiel, C.A.F.; Cua, M.; Libatique, N.C.; Tangonan, G.L.; Alampay, R.; Labuguen, R.T.; Favila, C.M.; Honrado, J.L.E.; Canos, V.; Devaney, C.; et al. UAV aerial imaging applications for post-disaster assessment, environmental management and infrastructure development. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 274–283. [Google Scholar]
- Shao, R.; Du, C.; Chen, H.; Li, J. Fast anchor point matching for emergency UAV image stitching using position and pose information. Sensors 2020, 20, 2007. [Google Scholar] [CrossRef] [Green Version]
- Bu, S.; Zhao, Y.; Wan, G.; Liu, Z. Map2DFusion: Real-time incremental UAV image mosaicing based on monocular SLAM. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 4564–4571. [Google Scholar]
- Xu, Y.; Ou, J.; He, H.; Zhang, X.; Mills, J. Mosaicking of unmanned aerial vehicle imagery in the absence of camera poses. Remote Sens. 2016, 8, 204. [Google Scholar] [CrossRef]
- Yuan, Y.; Fang, F.; Zhang, G. Superpixel-based seamless image stitching for UAV images. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1565–1576. [Google Scholar] [CrossRef]
- Wan, Q.; Chen, J.; Luo, L.; Gong, W.; Wei, L. Drone Image Stitching Using Local Mesh-Based Bundle Adjustment and Shape-Preserving Transform. IEEE Trans. Geosci. Remote Sens. 2020, 59, 7027–7037. [Google Scholar] [CrossRef]
- Guo, D.; Chen, J.; Luo, L.; Gong, W.; Wei, L. UAV Image Stitching Using Shape-Preserving Warp Combined with Global Alignment. IEEE Geosci. Remote Sens. Lett. 2021, 19, 8016005. [Google Scholar] [CrossRef]
- Jiang, X.; Ma, J.; Xiao, G.; Shao, Z.; Guo, X. A review of multimodal image matching: Methods and applications. Inf. Fusion 2021, 73, 22–71. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Gool, L.V. Surf: Speeded up robust features. Lect. Notes Comput. Sci. 2006, 3951, 404–417. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Torr, P.H.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef] [Green Version]
- Raguram, R.; Chum, O.; Pollefeys, M.; Matas, J.; Frahm, J.M. USAC: A universal framework for random sample consensus. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 2022–2038. [Google Scholar] [CrossRef]
- Ma, J.; Zhao, J.; Jiang, J.; Zhou, H.; Guo, X. Locality preserving matching. Int. J. Comput. Vis. 2019, 127, 512–531. [Google Scholar] [CrossRef]
- Jiang, X.; Xia, Y.; Zhang, X.P.; Ma, J. Robust image matching via local graph structure consensus. Pattern Recognit. 2022, 126, 108588. [Google Scholar] [CrossRef]
- Yi, K.M.; Trulls, E.; Ono, Y.; Lepetit, V.; Salzmann, M.; Fua, P. Learning to find good correspondences. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2666–2674. [Google Scholar]
- Ma, J.; Jiang, X.; Jiang, J.; Zhao, J.; Guo, X. LMR: Learning a two-class classifier for mismatch removal. IEEE Trans. Image Process. 2019, 28, 4045–4059. [Google Scholar] [CrossRef] [PubMed]
- Szeliski, R. Image alignment and stitching: A tutorial. Found. Trends Comput. Graph. Vis. 2007, 2, 1–104. [Google Scholar] [CrossRef]
- Brown, M.; Lowe, D.G. Automatic panoramic image stitching using invariant features. Int. J. Comput. Vis. 2007, 74, 59–73. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.Y.; Liu, S.; Matsushita, Y.; Ng, T.T.; Cheong, L.F. Smoothly varying affine stitching. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 345–352. [Google Scholar]
- Zaragoza, J.; Chin, T.J.; Brown, M.S.; Suter, D. As-projective-as-possible image stitching with moving DLT. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2339–2346. [Google Scholar]
- Zhang, F.; Liu, F. Parallax-tolerant image stitching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3262–3269. [Google Scholar]
- Lin, K.; Jiang, N.; Cheong, L.F.; Do, M.; Lu, J. Seagull: Seam-guided local alignment for parallax-tolerant image stitching. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 370–385. [Google Scholar]
- Chang, C.H.; Sato, Y.; Chuang, Y.Y. Shape-preserving half-projective warps for image stitching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3254–3261. [Google Scholar]
- Lin, C.C.; Pankanti, S.U.; Natesan Ramamurthy, K.; Aravkin, A.Y. Adaptive as-natural-as-possible image stitching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1155–1163. [Google Scholar]
- Chen, Y.S.; Chuang, Y.Y. Natural image stitching with the global similarity prior. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 186–201. [Google Scholar]
- Li, N.; Xu, Y.; Wang, C. Quasi-homography warps in image stitching. IEEE Trans. Multimed. 2017, 20, 1365–1375. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Wang, Z.; Lai, S.; Zhai, Y.; Zhang, M. Parallax-tolerant image stitching based on robust elastic warping. IEEE Trans. Multimed. 2017, 20, 1672–1687. [Google Scholar] [CrossRef]
- Joo, K.; Kim, N.; Oh, T.H.; Kweon, I.S. Line meets as-projective-as-possible image stitching with moving DLT. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 1175–1179. [Google Scholar]
- Chang, C.H.; Chuang, Y.Y. A line-structure-preserving approach to image resizing. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1075–1082. [Google Scholar]
- Zhang, G.; He, Y.; Chen, W.; Jia, J.; Bao, H. Multi-viewpoint panorama construction with wide-baseline images. IEEE Trans. Image Process. 2016, 25, 3099–3111. [Google Scholar] [CrossRef]
- Xiang, T.Z.; Xia, G.S.; Bai, X.; Zhang, L. Image stitching by line-guided local warping with global similarity constraint. Pattern Recognit. 2018, 83, 481–497. [Google Scholar] [CrossRef] [Green Version]
- Liao, T.; Li, N. Single-perspective warps in natural image stitching. IEEE Trans. Image Process. 2019, 29, 724–735. [Google Scholar] [CrossRef] [Green Version]
- Jia, Q.; Li, Z.; Fan, X.; Zhao, H.; Teng, S.; Ye, X.; Latecki, L.J. Leveraging line-point consistence to preserve structures for wide parallax image stitching. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 12186–12195. [Google Scholar]
- He, K.; Chang, H.; Sun, J. Rectangling panoramic images via warping. ACM Trans. Graph. (TOG) 2013, 32, 1–10. [Google Scholar] [CrossRef]
- Zhang, Y.; Lai, Y.K.; Zhang, F.L. Content-preserving image stitching with piecewise rectangular boundary constraints. IEEE Trans. Vis. Comput. Graph. 2020, 27, 3198–3212. [Google Scholar] [CrossRef] [PubMed]
- Nie, L.; Lin, C.; Liao, K.; Liu, S.; Zhao, Y. Deep Rectangling for Image Stitching: A Learning Baseline. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 8–24 June 2022; pp. 5740–5748. [Google Scholar]
- Von Gioi, R.G.; Jakubowicz, J.; Morel, J.M.; Randall, G. LSD: A fast line segment detector with a false detection control. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 32, 722–732. [Google Scholar] [CrossRef]
- Heckbert, P.S. Fundamentals of Texture Mapping and Image Warping. Master’s Thesis, University of California, Berkeley, CA, USA, 1989. [Google Scholar]
- Hejazifar, H.; Khotanlou, H. Fast and robust seam estimation to seamless image stitching. Signal Image Video Process. 2018, 12, 885–893. [Google Scholar] [CrossRef]
- Jia, Q.; Gao, X.; Fan, X.; Luo, Z.; Li, H.; Chen, Z. Novel coplanar line-points invariants for robust line matching across views. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 599–611. [Google Scholar]
- Martinez, F.; Ogayar, C.; Jiménez, J.R.; Rueda, A.J. A simple algorithm for Boolean operations on polygons. Adv. Eng. Softw. 2013, 64, 11–19. [Google Scholar] [CrossRef]
- Zhang, G.X.; Cheng, M.M.; Hu, S.M.; Martin, R.R. A shape-preserving approach to image resizing. In Computer Graphics Forum; Wiley Online Library: Oxford, UK, 2009; Volume 28, pp. 1897–1906. [Google Scholar]
- Paige, C.C.; Saunders, M.A. LSQR: An algorithm for sparse linear equations and sparse least squares. ACM Trans. Math. Softw. (TOMS) 1982, 8, 43–71. [Google Scholar] [CrossRef] [Green Version]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle adjustment—A modern synthesis. In Proceedings of the International Workshop on Vision Algorithms, Corfu, Greece, 21–22 September 1999; Springer: Berlin/Heidelberg, Germany, 1999; pp. 298–372. [Google Scholar]
- Agarwal, S.; Mierle, K. Ceres Solver; Google Inc.: Mountain View, CA, USA, 2012. [Google Scholar]
- Vedaldi, A.; Fulkerson, B. VLFeat: An open and portable library of computer vision algorithms. In Proceedings of the 18th ACM international conference on Multimedia, Firenze, Italy, 25–29 October 2010; pp. 1469–1472. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Index | Before BA | After BA | APAP | SPHP | SPW | Ours |
|---|---|---|---|---|---|---|---|
| Data1 | RMSE | 8.5970 | 8.5933 | 6.0377 | 6.1574 | 6.0629 | 5.5972 |
| Figure 13 | MAE | 3.3678 | 3.3686 | 3.2540 | 3.3420 | 3.3219 | 1.9391 |
| Data2 | RMSE | 2.1240 | 2.1266 | 5.6750 | 5.6471 | 5.5147 | 1.7673 |
| Figure 14 | MAE | 1.7257 | 1.7159 | 3.1976 | 3.4526 | 2.4515 | 1.3377 |
| Data3 | RMSE | 4.0980 | 3.9971 | 4.1204 | 4.0186 | 3.6397 | 2.2896 |
| MAE | 3.2134 | 2.9791 | 2.7285 | 2.5143 | 2.0645 | 1.4130 | |
| Data4 | RMSE | 7.4242 | 7.3383 | 5.6271 | 6.0172 | 5.4306 | 5.0339 |
| Figure 12 | MAE | 4.0264 | 3.8054 | 3.9023 | 3.8165 | 3.5662 | 2.4688 |
| Data5 | RMSE | 4.7913 | 4.6823 | 5.0560 | 4.7183 | 3.6900 | 1.7478 |
| MAE | 3.6084 | 3.4613 | 3.2635 | 3.1875 | 2.3887 | 1.3112 | |
| Data6 | RMSE | 5.1488 | 5.0816 | 5.0320 | 5.1276 | 4.4688 | 2.6228 |
| Figure 11 | MAE | 4.1076 | 4.0113 | 3.8081 | 3.7981 | 3.0834 | 1.9424 |
| Data7 | RMSE | 4.1558 | 4.0995 | 4.7475 | 4.5742 | 3.9555 | 1.6042 |
| Figure 7 | MAE | 3.3132 | 3.1776 | 2.9829 | 2.8156 | 1.9492 | 1.1854 |
| Data8 | RMSE | 3.9221 | 3.9119 | 4.7154 | 4.5639 | 4.3168 | 2.3277 |
| MAE | 3.1401 | 3.1309 | 3.0517 | 2.9813 | 2.7530 | 1.8276 |
| Datasets | Line Preservation | Line Alignment | ||
|---|---|---|---|---|
| SPW | Ours | SPW | Ours | |
| Data1 | 0.0528 | 0.0771 | 0.7009 | 0.4026 |
| Data2 | 0.9668 | 0.8897 | 0.8644 | 0.5631 |
| Data3 | 0.0526 | 0.0493 | 0.7470 | 0.4691 |
| Data4 | 0.0220 | 0.0388 | 0.7049 | 0.6947 |
| Data5 | 0.0194 | 0.0251 | 0.8841 | 0.4308 |
| Data6 | 0.0378 | 0.0384 | 1.0798 | 0.5268 |
| Data7 | 0.0670 | 0.0652 | 0.7157 | 0.3625 |
| Data8 | 0.1682 | 0.1986 | 0.8950 | 0.4466 |
| Methods | Index | APAP | SPHP | SPW | Ours |
|---|---|---|---|---|---|
| Data1 | time(s) | 20.694 | 8.352 | 6.750 | 7.283 |
| Data2 | time(s) | 11.197 | 5.5250 | 4.8120 | 4.682 |
| Data3 | time(s) | 12.325 | 7.815 | 5.782 | 5.378 |
| Data4 | time(s) | 10.276 | 8.235 | 4.177 | 3.461 |
| Data5 | time(s) | 31.764 | 20.673 | 15.685 | 14.205 |
| Data6 | time(s) | 34.624 | 30.862 | 21.155 | 16.337 |
| Data7 | time(s) | 31.613 | 17.746 | 14.039 | 13.098 |
| Data8 | time(s) | 25.737 | 15.101 | 11.220 | 9.965 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Q.; Wang, R.; Liu, F.; Xiao, J.; An, J.; Liu, J. High Precision Mesh-Based Drone Image Stitching Based on Salient Structure Preservation and Regular Boundaries. Drones 2023, 7, 230. https://doi.org/10.3390/drones7040230
Yu Q, Wang R, Liu F, Xiao J, An J, Liu J. High Precision Mesh-Based Drone Image Stitching Based on Salient Structure Preservation and Regular Boundaries. Drones. 2023; 7(4):230. https://doi.org/10.3390/drones7040230
Chicago/Turabian StyleYu, Qiuze, Ruikai Wang, Fanghong Liu, Jinsheng Xiao, Jiachun An, and Jin Liu. 2023. "High Precision Mesh-Based Drone Image Stitching Based on Salient Structure Preservation and Regular Boundaries" Drones 7, no. 4: 230. https://doi.org/10.3390/drones7040230
APA StyleYu, Q., Wang, R., Liu, F., Xiao, J., An, J., & Liu, J. (2023). High Precision Mesh-Based Drone Image Stitching Based on Salient Structure Preservation and Regular Boundaries. Drones, 7(4), 230. https://doi.org/10.3390/drones7040230