



Joint Beamforming and Phase Shift Design for Hybrid IRS and UAV-Aided Directional Modulation Networks

 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
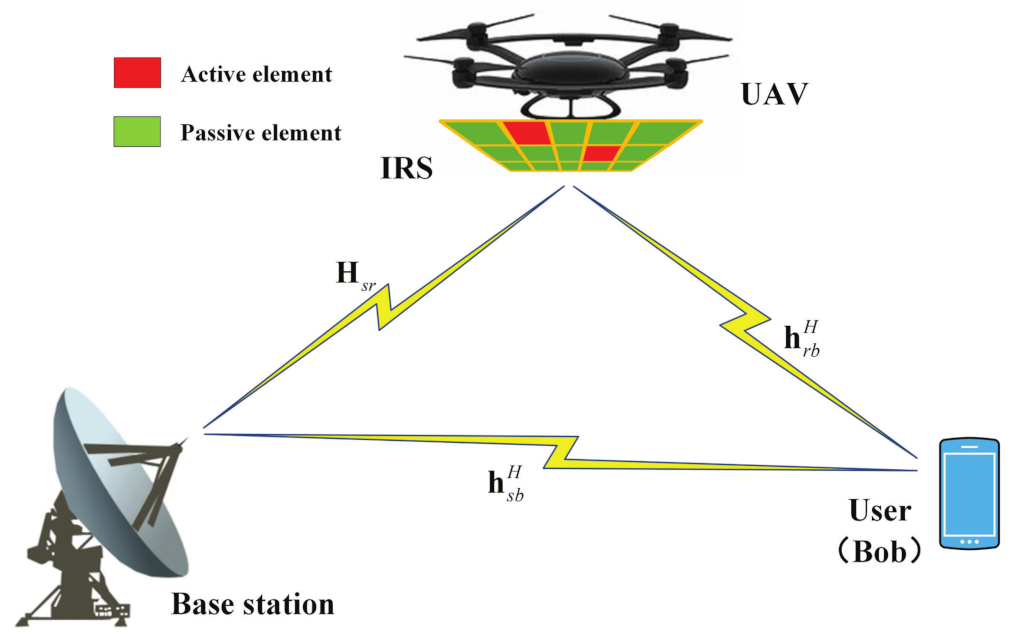
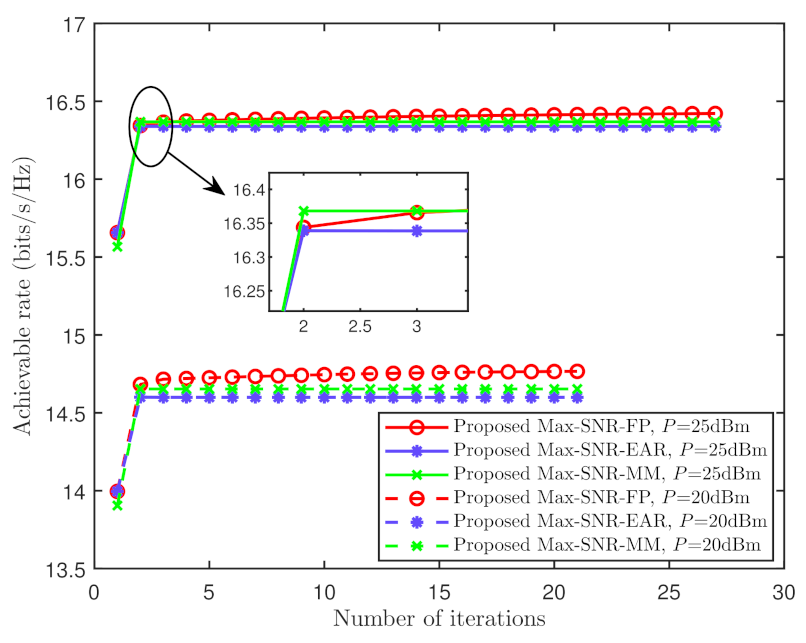
- To balance performance, cost, and power consumption well, a hybrid IRS and UAV-aided DM system model is proposed. Aiming at maximizing the achievable rate, an optimization problem of maximizing the signal-to-noise ratio (SNR) is established, and the maximal SNR-fractional programming (FP) (Max-SNR-FP) method is proposed to jointly optimize the transmit beamforming vector and hybrid IRS PSM by solving one and giving another. In this scheme, the beamforming vector and passive IRS PSM are derived via the SCA algorithm, and the active IRS PSM is computed with the FP method.
- 2.
- Given the high computational complexity of the Max-SNR-FP scheme, a low-complexity alternating iteration method named maximum SNR-equal amplitude reflecting (EAR) (Max-SNR-EAR) is subsequently proposed. In this method, by utilizing the maximal signal-to-leakage-noise ratio (SLNR) criterion, the beamforming vector is obtained. Then, the phases of passive and active IRS phase shift matrices are computed on the basis of the criteria of phase alignment, while the amplitude of the active IRS PSM is obtained via the EAR criterion.
- 3.
- Given that the passive and active IRS phase shift matrices of the proposed Max-SNR-FP and Max-SNR-EAR methods were designed separately, to investigate the effect of jointly optimizing them on performance improvement, low-complexity alternating optimization algorithm Max-SNR-MM is proposed to maximize the achievable rate. The majorization–minimization (MM) criterion was employed to optimize the hybrid IRS phase-shift matrix. The simulation results clearly show that the achievable rates harvested with the three proposed methods were higher than those without IRS, random-phase IRS, and passive IRS. In addition, when the number of hybrid IRS phase shift elements tended towards a large scale, the difference in achievable rates among these three proposed methods was trivial.
2. System Model
3. Proposed Max-SNR-FP Scheme
3.1. Optimize Given and
3.2. Optimizing Given and
3.3. Optimizing Given and
| Algorithm 1 Proposed Max-SNR-FP algorithm |
|
4. Proposed Max-SNR-EAR Scheme
4.1. Optimizing Given and
4.2. Optimizing and given
5. Proposed Max-SNR-MM Scheme
5.1. Optimizing Given
5.2. Optimize Given
| Algorithm 2 Proposed Max-SNR-MM algorithm |
|
6. Simulation Results
- (1)
- No-IRS: Without the IRS, the channel matrix and vector of IRS-related links become a zero matrix and zero vector, i.e., and , and only beamforming is optimized.
- (2)
- Random phase: the hybrid IRS PSM is set to , where is randomly selected from , and only beamforming is optimized.
- (3)
- Passive IRS: the number of active IRS elements is equal to 0, and only beamforming and passive IRS PSM are optimized.
- (4)
- Active IRS: the number of passive IRS elements is equal to 0, and only beamforming and active IRS PSM are optimized.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IRS | Intelligent reflecting surface |
| UAV | Unmanned aerial vehicle |
| DM | Directional modulation |
| SNR | Signal-to-noise ratio |
| FP | Fractional programming |
| Max-SNR-FP | Maximum SNR-FP |
| EAR | Equal amplitude reflecting |
| Max-SNR-EAR | Maximum SNR-EAR |
| MM | Majorization-minimization |
| Max-SNR-MM | Maximum SNR-MM |
| PSM | Phase shift matrix |
| LoP | Line-of-propagation |
| SCA | Successive convex approximation |
| SR | Secrecy rate |
| AN | Artificial noise |
| PSM | Phase shift matrix |
| MISO | Multiple-input single-output |
| PL | Path loss |
| SLNR | Signal-to-leakage-noise ratio |
| BS | Base station |
| FLOPs | Float-point operations |
References
- Wu, Y.; Khisti, A.; Xiao, C.; Caire, G.; Wong, K.K.; Gao, X. A Survey of Physical Layer Security Techniques for 5G Wireless Networks and Challenges Ahead. IEEE J. Sel. Areas Commun. 2018, 36, 679–695. [Google Scholar] [CrossRef]
- Zheng, G.; Krikidis, I.; Li, J.; Petropulu, A.P.; Ottersten, B. Improving Physical Layer Secrecy Using Full-Duplex Jamming Receivers. IEEE Trans. Signal Process. 2013, 61, 4962–4974. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Yin, S.; Li, L.; Yu, F.R. Resource Allocation and Basestation Placement in Downlink Cellular Networks Assisted by Multiple Wireless Powered UAVs. IEEE Trans. Veh. Technol. 2020, 69, 2171–2184. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; He, Q.; Bian, K.; Song, L. Joint Trajectory and Power Optimization for UAV Relay Networks. IEEE Commun. Lett. 2018, 22, 161–164. [Google Scholar] [CrossRef]
- Zhou, X.; Yan, S.; Shu, F.; Chen, R.; Li, J. UAV-Enabled Covert Wireless Data Collection. IEEE J. Sel. Areas Commun. 2021, 39, 3348–3362. [Google Scholar] [CrossRef]
- Wen, F.; Shi, J.; Gui, G.; Gacanin, H.; Dobre, O.A. 3-D Positioning Method for Anonymous UAV Based on Bistatic Polarized MIMO Radar. IEEE Internet Things J. 2023, 10, 815–827. [Google Scholar] [CrossRef]
- Azari, M.M.; Geraci, G.; Garcia-Rodriguez, A.; Pollin, S. UAV-to-UAV Communications in Cellular Networks. IEEE Trans. Wirel. Commun. 2020, 19, 6130–6144. [Google Scholar] [CrossRef]
- Zeng, S.; Zhang, H.; Di, B.; Song, L. Trajectory Optimization and Resource Allocation for OFDMA UAV Relay Networks. IEEE Trans. Wirel. Commun. 2021, 20, 6634–6647. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, W.; Guan, X.; Wu, Q. UAV-Enabled Relay Communication Under Malicious Jamming: Joint Trajectory and Transmit Power Optimization. IEEE Trans. Veh. Technol. 2021, 70, 8275–8279. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef]
- Hua, M.; Yang, L.; Wu, Q.; Pan, C.; Li, C.; Swindlehurst, A.L. UAV-Assisted Intelligent Reflecting Surface Symbiotic Radio System. IEEE Trans. Wirel. Commun. 2021, 20, 5769–5785. [Google Scholar] [CrossRef]
- Su, Y.; Pang, X.; Chen, S.; Jiang, X.; Zhao, N.; Yu, F.R. Spectrum and Energy Efficiency Optimization in IRS-Assisted UAV Networks. IEEE Trans Commun. 2022, 70, 6489–6502. [Google Scholar] [CrossRef]
- Fang, S.; Chen, G.; Li, Y. Joint optimization for secure intelligent reflecting surface assisted UAV networks. IEEE Wirel. Commun. Lett. 2021, 10, 276–280. [Google Scholar] [CrossRef]
- Pang, X.; Zhao, N.; Tang, J.; Wu, C.; Niyato, D.; Wong, K.K. IRS-Assisted Secure UAV Transmission via Joint Trajectory and Beamforming Design. IEEE Trans. Commun. 2022, 70, 1140–1152. [Google Scholar] [CrossRef]
- Pan, Y.; Wang, C.; Pan, C.; Zhu, H.; Wang, J. UAV-assisted and intelligent reflecting surfaces-supported terahertz communication. Wirel. Commun. Lett. 2021, 10, 1256–1260. [Google Scholar] [CrossRef]
- Cheng, Q.; Wang, S.; Fusco, V.; Wnag, F.; Zhu, J.; Gu, C. Physical-layer security for frequency diverse array-based directional modulation in fluctuating two-ray fading channels. IEEE Trans. Wirel. Commun. 2021, 20, 4190–4204. [Google Scholar]
- Wang, W.Q.; Zheng, Z. Hybrid MIMO and phased-array directional modulation for physical layer security in mmWave wireless communications. IEEE J. Sel. Areas Commun. 2018, 36, 1383–1396. [Google Scholar]
- Nusenu, S.Y. Development of frequency modulated array antennas for millimeter-wave communications. Wirel. Commun. Mob. Comput. 2019, 2019, 1–16. [Google Scholar] [CrossRef]
- Qiu, B.; Wang, L.; Xie, J.; Zhang, Z.; Wang, Y.; Tao, M. Multi-beam index modulation with cooperative legitimate users schemes based on frequency diverse array. IEEE Trans. Veh. Technol. 2020, 69, 11028–11041. [Google Scholar] [CrossRef]
- Daly, M.P.; Bemhard, J.T. Directional modulation technique for phased arrays. IEEE Trans. Antennas Propag. 2009, 57, 2633–2640. [Google Scholar] [CrossRef]
- Daly, M.P.; Bernhard, J.T. Beamsteering in Pattern Reconfigurable Arrays Using Directional Modulation. IEEE Trans. Antennas Propag. 2010, 58, 2259–2265. [Google Scholar] [CrossRef]
- Shu, F.; Wu, X.; Li, J.; Chen, R.; Vucetic, B. Robust synthesis scheme for secure multi-beam directional modulation in broadcasting systems. IEEE Access 2016, 4, 6614–6623. [Google Scholar] [CrossRef]
- Xie, T.; Zhu, J.; Li, Y. Artificial-Noise-Aided Zero-Forcing Synthesis Approach for Secure Multi-Beam Directional Modulation. IEEE Commun. Lett. 2018, 22, 276–279. [Google Scholar] [CrossRef]
- Teng, Y.; Li, J.; Huang, M.; Liu, L.; Xia, G.; Zhou, X.; Shu, F.; Wang, J. Low-complexity and high-performance receive beamforming for secure directional modulaion networks against an eavesdropping-enabled full-duplex attacker. Sci. China Inf. Sci. 2022, 65, 119302. [Google Scholar] [CrossRef]
- Shu, F.; Teng, Y.; Li, J.; Huang, M.; Shi, W.; Li, J.; Wu, Y.; Wang, J. Enhanced Secrecy Rate Maximization for Directional Modulation Networks via IRS. IEEE Trans. Commun. 2021, 69, 8388–8401. [Google Scholar] [CrossRef]
- Dong, R.; Jiang, S.; Hua, X.; Teng, Y.; Shu, F.; Wang, J. Low-complexity joint phase adjustment and receive beamforming for directional modulation networks via IRS. IEEE Open J. Commun. Soc. 2022, 3, 1234–1243. [Google Scholar] [CrossRef]
- Chen, J.; Xiao, Y.; Lei, X.; Niu, H.; Yuan, Y. Artificial noise aided directional modulation via reconfigurable intelligent surface: Secrecy guarantee in range domain. IET Commun. 2022, 16, 1558–1569. [Google Scholar] [CrossRef]
- Zhang, Z.; Dai, L.; Chen, X.; Liu, C.; Yang, F.; Schober, R.; Poor, H.V. Active RIS vs. passive RIS: Which will previal in 6G? IEEE Trans. Commun. 2022, 71, 1707–1725. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, Z.; Dai, L.; Xu, S.; Yang, F. Active reconfigurable intelligent surface: Fully-Connected or Sub-Connected? IEEE Commun. Lett. 2022, 26, 167–171. [Google Scholar] [CrossRef]
- Ren, H.; Chen, Z.; Hu, G.; Peng, Z.; Pan, C.; Wang, J. Transmission Design for Active RIS-Aided Simultaneous Wireless Information and Power Transfer. IEEE Wirel. Commun. Lett. 2023, 12, 600–604. [Google Scholar] [CrossRef]
- Dong, L.; Wang, H.M.; Bai, J. Active Reconfigurable Intelligent Surface Aided Secure Transmission. IEEE Trans. Veh. Technol. 2022, 71, 2181–2186. [Google Scholar] [CrossRef]
- Lv, W.; Bai, J.; Yan, Q.; Wang, H.M. RIS-Assisted Green Secure Communications: Active RIS or Passive RIS? IEEE Wirel. Commun. Lett. 2023, 12, 237–241. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Nguyen, V.D.; Wu, Q.; Tölli, A.; Chatzinotas, S.; Juntti, M. Hybrid Active-Passive Reconfigurable Intelligent Surface-Assisted Multi-User MISO Systems. In Proceedings of the 2022 IEEE 23rd International Workshop on Signal Processing Advances in Wireless Communication (SPAWC), Oulu, Finland, 4–6 July 2022; pp. 1–5. [Google Scholar]
- Nguyen, N.T.; Vu, Q.D.; Lee, K.; Juntti, M. Hybrid Relay-Reflecting Intelligent Surface-Assisted Wireless Communications. IEEE Trans. Veh. Technol. 2022, 71, 6228–6244. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Vu, Q.D.; Lee, K.; Juntti, M. Spectral Efficiency Optimization for Hybrid Relay-Reflecting Intelligent Surface. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Ngo, K.H.; Nguyen, N.T.; Dinh, T.Q.; Hoang, T.M.; Juntti, M. Low-Latency and Secure Computation Offloading Assisted by Hybrid Relay-Reflecting Intelligent Surface. In Proceedings of the 2021 International Conference on Advanced Technologies for Communications (ATC), Ho Chi Minh City, Vietnam, 14–16 October 2021; pp. 306–311. [Google Scholar]
- Hu, J.; Shi, X.; Yan, S.; Chen, Y.; Zhao, T.; Shu, F. Hybrid Relay-Reflecting Intelligent Surface-Aided Covert Communications. arXiv 2022, arXiv:2203.12223. [Google Scholar]
- Sankar, R.P.; Chepuri, S.P. Beamforming in Hybrid RIS assisted Integrated Sensing and Communication Systems. In Proceedings of the 2022 30th European Signal Processing Conference (EUSIPCO), Belgrade, Serbia, 29 August–2 September 2022; pp. 1082–1086. [Google Scholar]
- Pan, C.; Ren, H.; Wang, K.; Xu, W.; Elkashlan, M.; Nallanathan, A.; Hanzo, L. Multicell MIMO communications relaying on intelligent reflecting surfaces. IEEE Trans. Wirel. Commun. 2020, 19, 5218–5233. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, L.; Cui, S. Channel estimation for intelligent reflecting surface assisted multiuser communications: Framework, algorithms, and analysis. IEEE Trans. Wirel. Commun. 2020, 19, 6607–6620. [Google Scholar] [CrossRef]
- Shi, W.; Li, J.; Xia, G.; Wang, Y.; Zhou, X.; Zhang, Y.; Shu, F. Secure multigroup multicast communication systems via intelligent reflecting surface. China Commun. 2021, 18, 39–51. [Google Scholar] [CrossRef]
- Dinkelbach, W. On nonlinear fractional programming. Manag. Sci. 1967, 13, 492–498. [Google Scholar] [CrossRef]
- Sadek, M.; Tarighat, A.; Sayed, A.H. A leakage-based precoding scheme for downlink multi-user MIMO channels. IEEE Trans. Wirel. Commun. 2007, 6, 1711–1721. [Google Scholar] [CrossRef]
- Nasir, A.A.; Tuan, H.D.; Duong, T.Q.; Poor, H.V. Secrecy Rate Beamforming for Multicell Networks With Information and Energy Harvesting. IEEE Trans. Signal Process. 2017, 65, 677–689. [Google Scholar] [CrossRef]
- Sun, Y.; Babu, P.; Palomar, D.P. Majorization-Minimization Algorithms in Signal Processing, Communications, and Machine Learning. IEEE Trans. Signal Process. 2017, 65, 794–816. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, R.; He, H.; Shu, F.; Zhang, Q.; Chen, R.; Yan, S.; Wang, J. Joint Beamforming and Phase Shift Design for Hybrid IRS and UAV-Aided Directional Modulation Networks. Drones 2023, 7, 364. https://doi.org/10.3390/drones7060364
Dong R, He H, Shu F, Zhang Q, Chen R, Yan S, Wang J. Joint Beamforming and Phase Shift Design for Hybrid IRS and UAV-Aided Directional Modulation Networks. Drones. 2023; 7(6):364. https://doi.org/10.3390/drones7060364
Chicago/Turabian StyleDong, Rongen, Hangjia He, Feng Shu, Qi Zhang, Riqing Chen, Shihao Yan, and Jiangzhou Wang. 2023. "Joint Beamforming and Phase Shift Design for Hybrid IRS and UAV-Aided Directional Modulation Networks" Drones 7, no. 6: 364. https://doi.org/10.3390/drones7060364
APA StyleDong, R., He, H., Shu, F., Zhang, Q., Chen, R., Yan, S., & Wang, J. (2023). Joint Beamforming and Phase Shift Design for Hybrid IRS and UAV-Aided Directional Modulation Networks. Drones, 7(6), 364. https://doi.org/10.3390/drones7060364