
Decomposition and Modeling of the Situational Awareness of Unmanned Aerial Vehicles for Advanced Air Mobility

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Situational Awareness
- Perception of the status, attributes and dynamics of the elements of the environment that are relevant to understanding a specific situation.
- Understanding of the meaning and importance of the elements perceived in the first stage, depending on the situation and the intended goals.
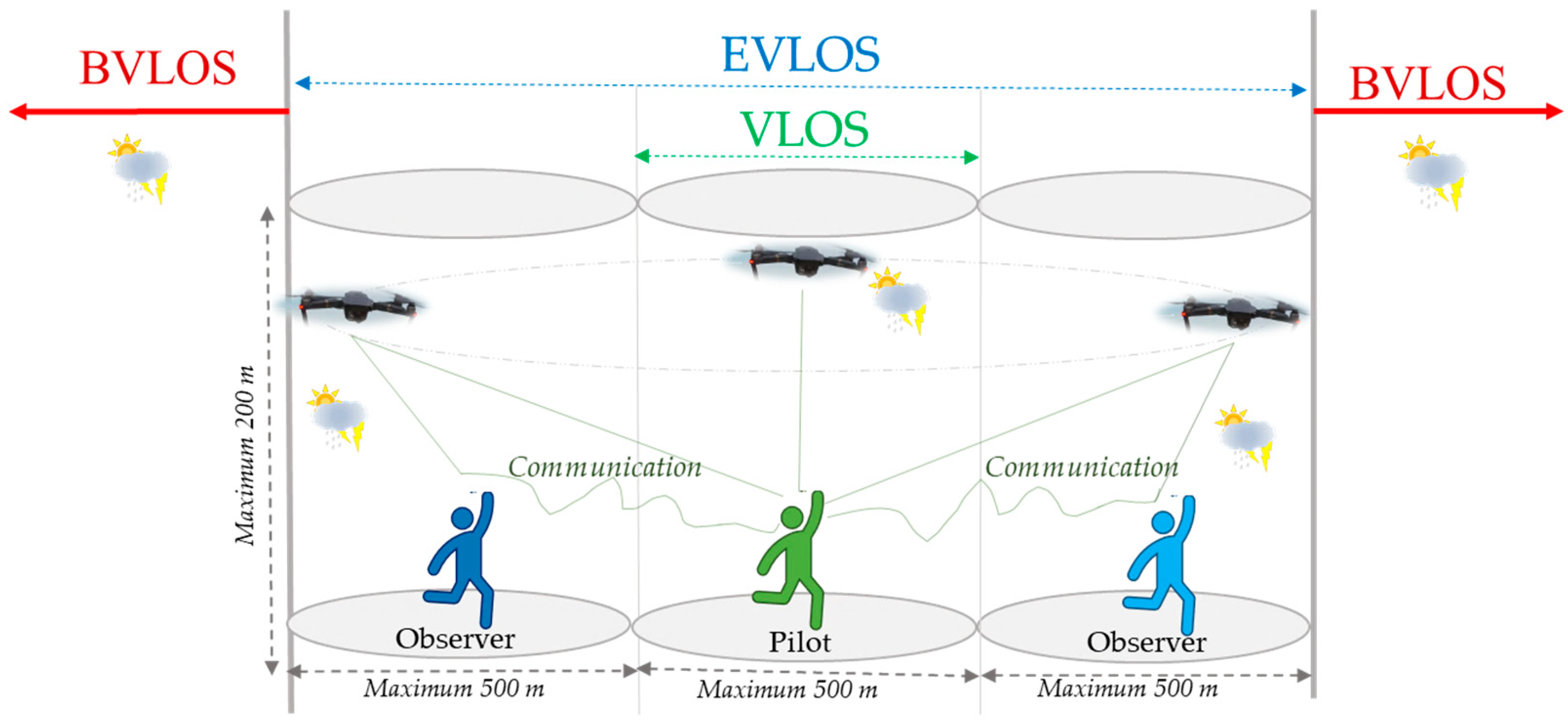
3. Analysis of Technologies and Procedures for beyond Visual Line-of-Sight Operations
3.1. Command and Control of the UAV
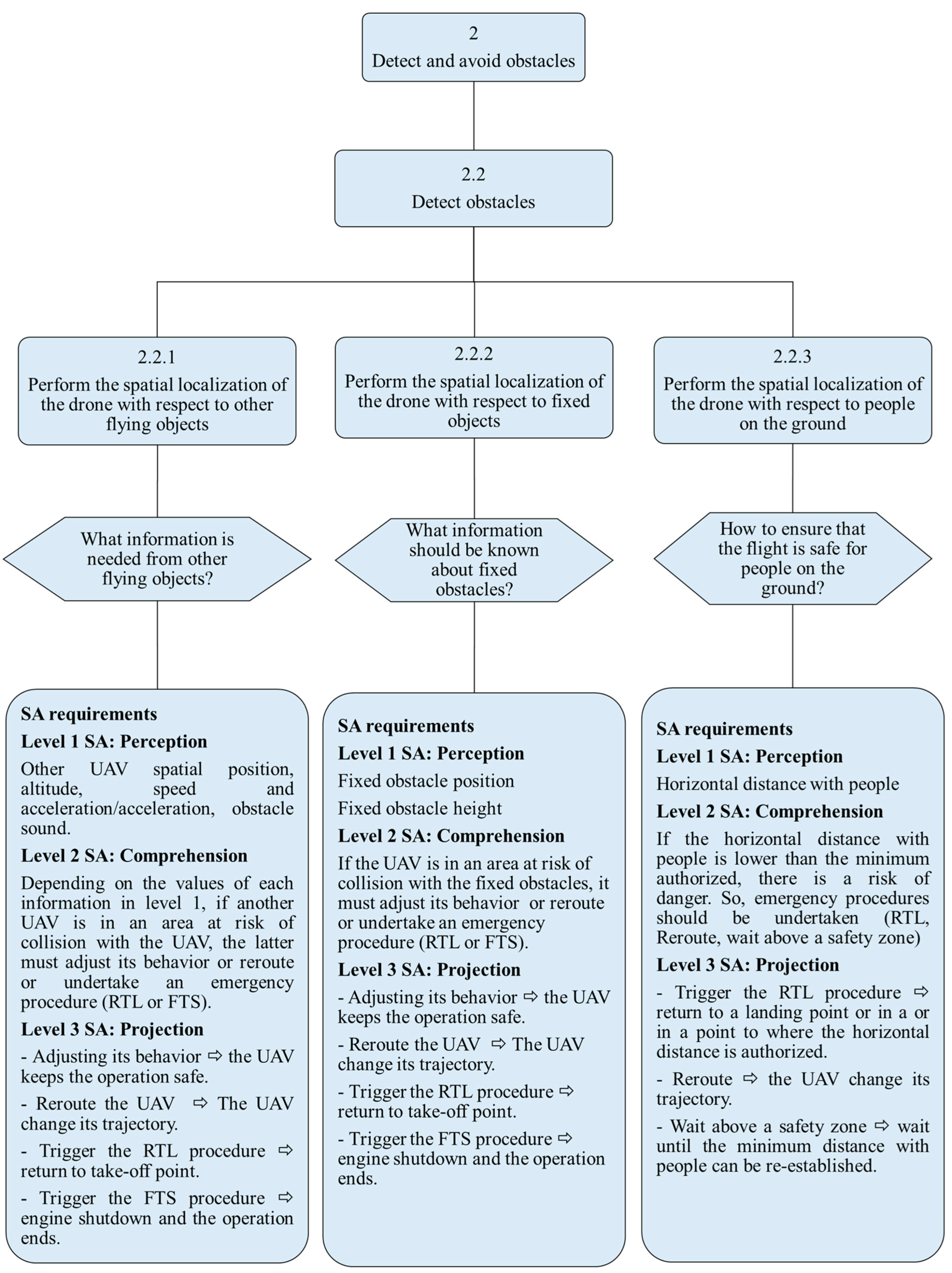
3.2. Detect and Avoid
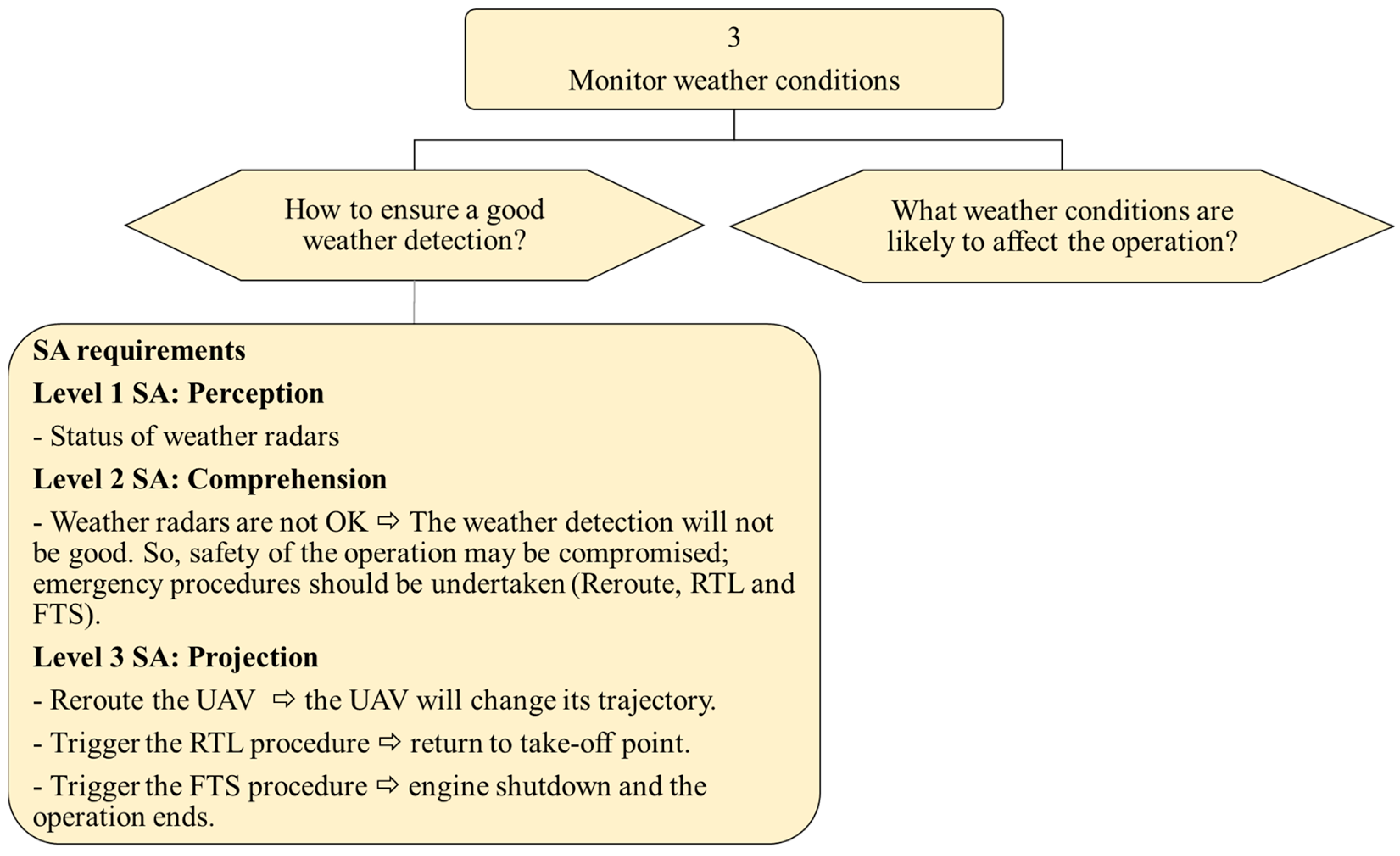
3.3. Detection of Weather Conditions
3.4. Awareness of the State of the UAV
4. Analysis of Technologies and Procedures for beyond Visual Line-of-Sight Operations
4.1. Related Work
4.2. UAV-Related Situational Awareness in Advanced Air Mobility
 ) or decisions (represented by hexagonal shapes
) or decisions (represented by hexagonal shapes  ) and the leaves are the elementary SA requirements necessary for the achievement of these sub-goals and, consequently, the main goal. The goal, sub-goals and SA requirements are defined in relation to the other entities in the system [13].
) and the leaves are the elementary SA requirements necessary for the achievement of these sub-goals and, consequently, the main goal. The goal, sub-goals and SA requirements are defined in relation to the other entities in the system [13].5. High-Level SysML Modeling of the Advanced Air Mobility
5.1. Block Definition Diagram for the Advanced Air Mobility
 ) represent composition relationships (i.e., the block at the filled diamond end of the arrow is composed of the object at the other end). Arrows with an empty diamond at one end (
) represent composition relationships (i.e., the block at the filled diamond end of the arrow is composed of the object at the other end). Arrows with an empty diamond at one end ( ) indicate aggregation relationships (i.e., the block at the empty diamond end of the arrow may contain the object at the other end). Simple arrows with a triangle at one end (
) indicate aggregation relationships (i.e., the block at the empty diamond end of the arrow may contain the object at the other end). Simple arrows with a triangle at one end ( ) represent specialization relationships (i.e., the block at the triangle end is a generalization of the object at the other end). Simple arrows (
) represent specialization relationships (i.e., the block at the triangle end is a generalization of the object at the other end). Simple arrows ( ) represent independent associations between two blocks.
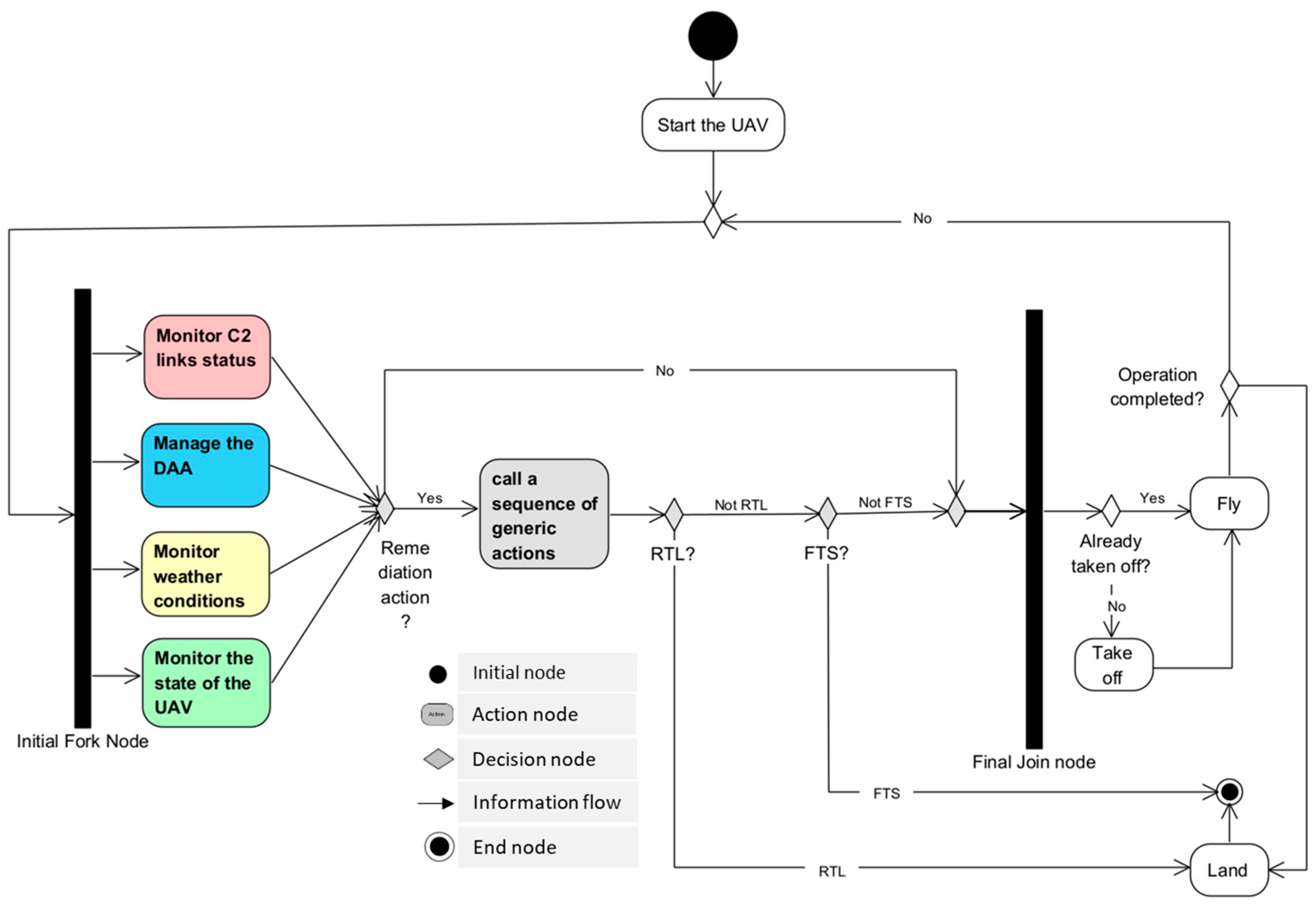
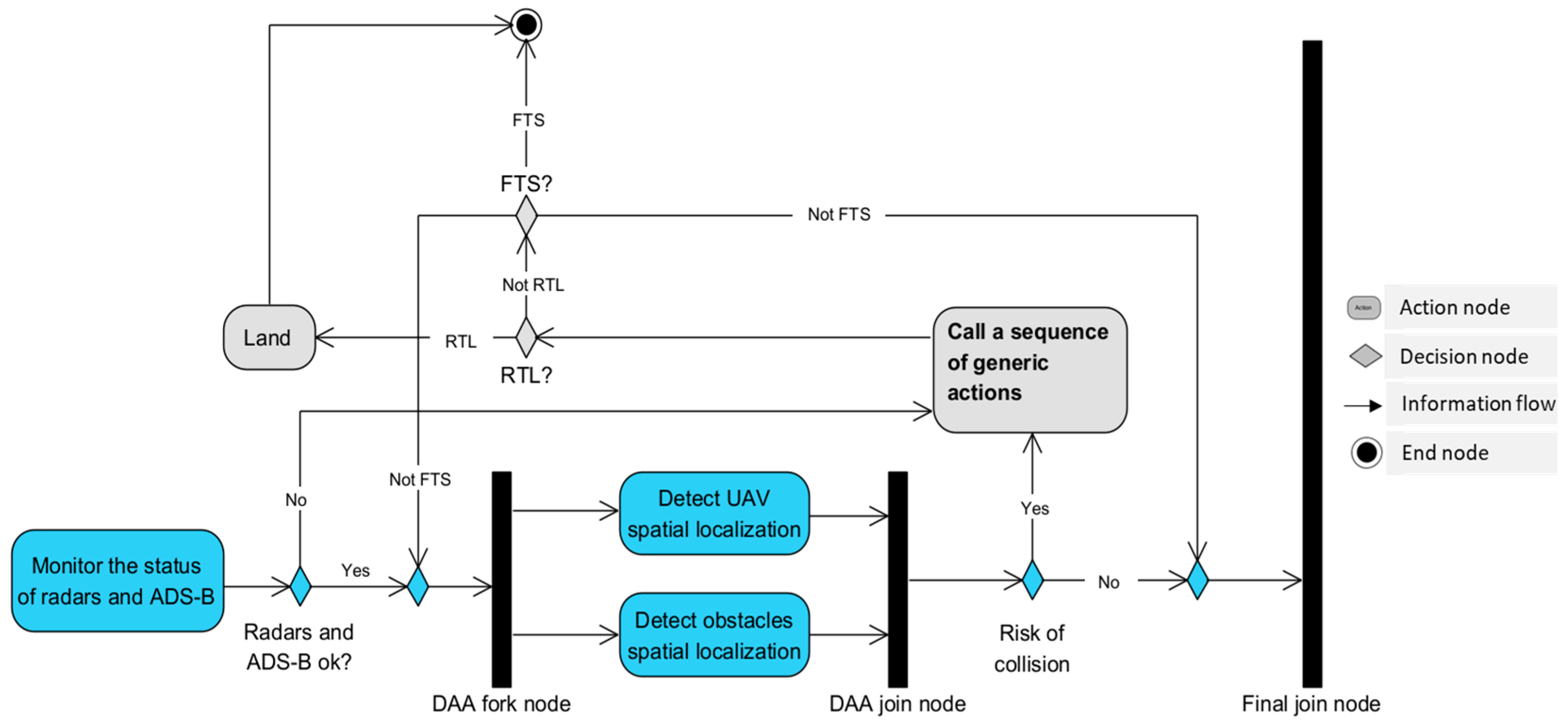
) represent independent associations between two blocks.5.2. Activity Diagram of the UAV in the Advanced Air Mobility
 ), actions (represented by rectangles with rounded corners
), actions (represented by rectangles with rounded corners  ), control flows between actions (represented by arrows
), control flows between actions (represented by arrows  ), decisions/merges (represented by diamonds
), decisions/merges (represented by diamonds  ) and one or more final nodes (represented by an empty circle containing a solid one
) and one or more final nodes (represented by an empty circle containing a solid one  ). An activity diagram can also contain fork nodes which allow an action to be duplicated into a set of parallel sub-actions, each of which produces a token at the end of its execution. For the main action of the fork node to be considered complete, all of the tokens produced by the parallel actions must compose a join node which produces the result of the action (the input of the associated fork node). Both fork and join nodes are represented by a thick line (
). An activity diagram can also contain fork nodes which allow an action to be duplicated into a set of parallel sub-actions, each of which produces a token at the end of its execution. For the main action of the fork node to be considered complete, all of the tokens produced by the parallel actions must compose a join node which produces the result of the action (the input of the associated fork node). Both fork and join nodes are represented by a thick line ( ).
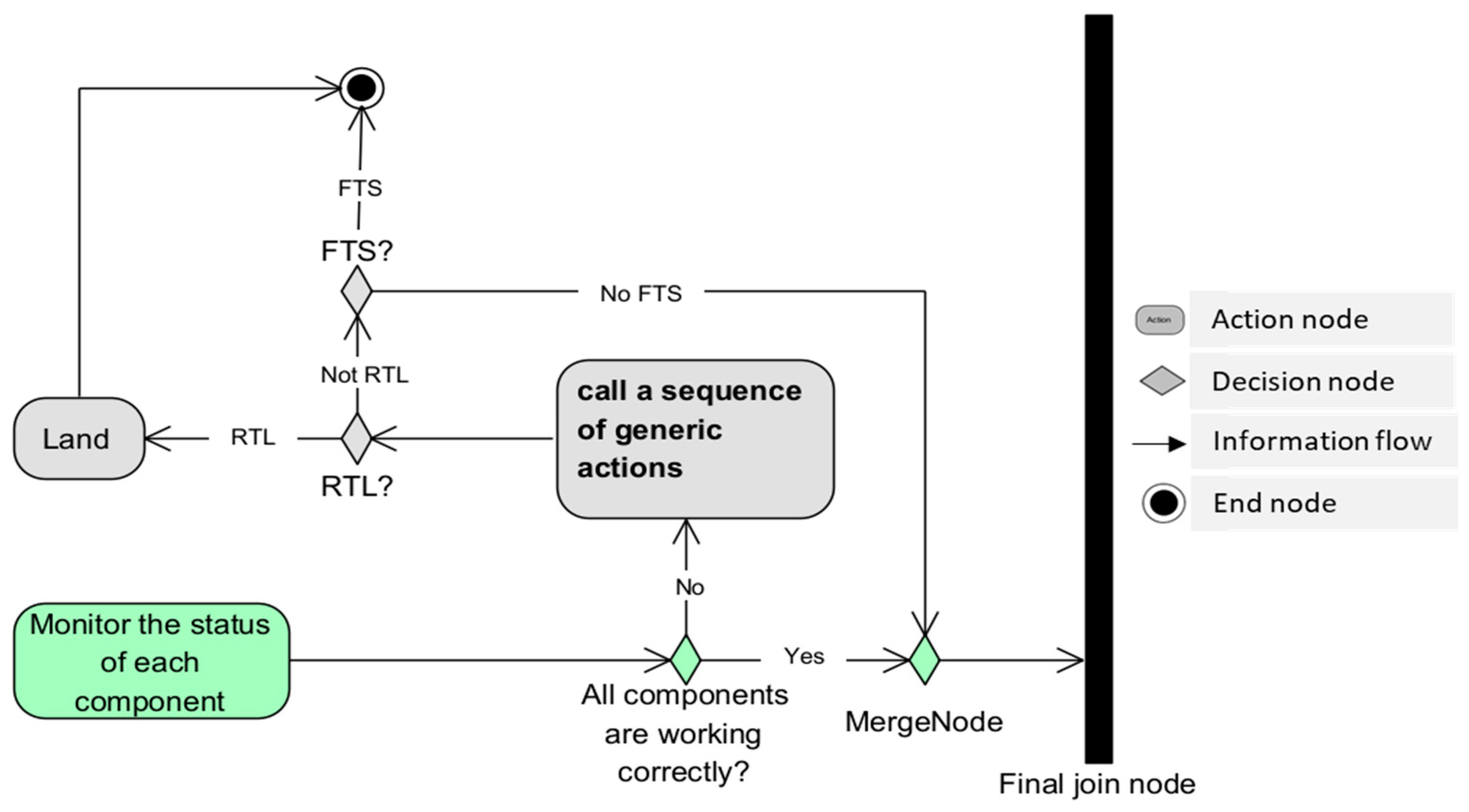
).5.2.1. The Sub-Activity Call a Sequence of Generic Actions
5.2.2. The Sub-Activity Monitor C2 Links Status
5.2.3. The Sub-Activity Monitor Threats
5.2.4. The Sub-Activity Monitor Weather Conditions
5.2.5. The Sub-Activity Monitor the State of the UAV
6. Case Study
6.1. Analysis of the DJI Matrice 300 RTK
6.2. Results and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Transport Canada. Transport Canada’s Drone Strategy to 2025; Transport Canada: Ottawa, ON, Canada, 2021.
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Sweeney, N. Civilian Drone Use in Canada. 2017. Available online: https://lop.parl.ca/sites/PublicWebsite/default/en_CA/ResearchPublications/201723E? (accessed on 22 April 2022).
- Government of Canada. Canadian Aviation Regulations (SOR/96-433); Government of Canada: Ottawa, ON, Canada, 2022.
- Transport Canada. Aeronautical Information Manual; Transport Canada: Ottawa, ON, Canada, 2021.
- Drury, J.L.; Riek, L.; Rackliffe, N. A decomposition of UAV-related situation awareness. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006. [Google Scholar]
- Davies, L.; Bolam, R.C.; Vagapov, Y.; Anuchin, A. Review of unmanned aircraft system technologies to enable beyond visual line of sight (BVLOS) operations. In Proceedings of the 2018 X International Conference on Electrical Power Drive Systems (ICEPDS), Novocherkassk, Russia, 3–6 October 2018; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Bloise, N.; Primatesta, S.; Antonini, R.; Fici, G.P.; Gaspardone, M.; Guglieri, G.; Rizzo, A. A survey of unmanned aircraft system technologies to enable safe operations in urban areas. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Politi, E.; Panagiotopoulos, I.E.; Varlamis, I.; Dimitrakopoulos, G. A Survey of UAS Technologies to Enable beyond Visual Line of Sight (BVLOS) Operations. In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), Prague, Czech Republic, 28–30 April 2021. [Google Scholar]
- National Academies of Sciences, Engineering and Medicine. Advancing Aerial Mobility: A National Blueprint; National Academies Press: Cambridge, MA, USA, 2020. [Google Scholar] [CrossRef]
- Prevot, T.; Rios, J.; Kopardekar, P.; Robinson, J.E., III; Johnson, M.; Jung, J. UAS traffic management (UTM) concept of operations to safely enable low altitude flight operations. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Blake, T. What Is Unmanned Aircraft Systems Traffic Management; NASA: Washington, DC, USA, 2021. [Google Scholar]
- Endsley, M.R.; Bolté, B.; Jones, D.G. Designing for Situation Awareness: An Approach to User-Centered Design; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Vankipuram, M.; Kahol, K.; Cohen, T.; Patel, V.L. Toward automated workflow analysis and visualization in clinical environments. J. Biomed. Inform. 2011, 44, 432–440. [Google Scholar] [CrossRef] [PubMed]
- Endsley, M.R. Toward a theory of situation awareness in dynamic systems. Hum. Factors 1995, 37, 32–64. [Google Scholar] [CrossRef]
- Jane, G.V. Human Performance and Situation Awareness Measures; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- NASA. Advanced Air Mobility: What Is AAM? Student Guide; NASA: Washington, DC, USA, 2020. [Google Scholar]
- Goyal, R.; Cohen, A. Advanced Air Mobility: Opportunities and Challenges Deploying eVTOLs for Air Ambulance Service. Appl. Sci. 2022, 12, 1183. [Google Scholar] [CrossRef]
- Fang, S.X.; O’Young, S.; Rolland, L. Development of small uas beyond-visual-line-of-sight (bvlos) flight operations: System requirements and procedures. Drones 2018, 2, 13. [Google Scholar] [CrossRef] [Green Version]
- Jacob, J.; Chilson, P.B.; Houston, A.L.; Pinto, J.O.; Smith, S. Real-time Weather Awareness for Enhanced Advanced Aerial Mobility Safety Assurance. In Proceedings of the AGU Fall Meeting Abstracts, Online, Everywhere, 1–17 December 2020. [Google Scholar]
- Vasile, P.; Cioacă, C.; Luculescu, D.; Luchian, A.; Pop, S. Consideration about UAV command and control. Ground Control Station. In Proceedings of the 5th International Scientific Conference SEA-CONF 2019, Constanta, Romania, 17–18 May 2019; IOP Publishing: Bristol, UK, 2019. [Google Scholar]
- Unmanned Systems Technology. UAV Autopilot Systems. 13 January 2022. Available online: https://www.unmannedsystemstechnology.com/expo/uav-autopilot-systems/ (accessed on 30 May 2022).
- Nickols, F.; Lin, Y.J. Creating Precision Robots: A Project-Based Approach to the Study of Mechatronics and Robotics; Butterworth-Heinemann: Oxford, UK, 2018. [Google Scholar]
- Stevenson, J.D.; O’Young, S.; Rolland, L. Assessment of alternative manual control methods for small unmanned aerial vehicles. J. Unmanned Veh. Syst. 2015, 3, 73–94. [Google Scholar] [CrossRef] [Green Version]
- Ro, K.; Oh, J.-S.; Dong, L. Lessons learned: Application of small uav for urban highway traffic monitoring. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007. [Google Scholar]
- Stansbury, R.; Wilson, T.; Tanis, W. A technology survey of emergency recovery and flight termination systems for uas. In Proceedings of the AIAA Infotech@Aerospace Conference, Seattle, WA, USA, 6–9 April 2009. [Google Scholar]
- Kim, D.-H.; Go, Y.-G.; Choi, S.-M. An aerial mixed-reality environment for first-person-view drone flying. Appl. Sci. 2020, 10, 5436. [Google Scholar]
- Smolyanskiy, N.; Gonzalez-Franco, M. Stereoscopic first person view system for drone navigation. Front. Robot. AI 2017, 4, 11. [Google Scholar] [CrossRef] [Green Version]
- Transport Canada. Flying Your Drone Safely and Legally; Transport Canada: Ottawa, ON, Canada, 2020.
- Lyu, H. Detect and avoid system based on multi sensor fusion for UAV. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 17–19 October 2018; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Minucci, F.; Vinogradov, E.; Pollin, S. Avoiding collisions at any (low) cost: ADS-B like position broadcast for UAVs. IEEE Access 2020, 8, 121843–121857. [Google Scholar] [CrossRef]
- Shadab, N.; Xu, H. A systematic approach to mission and scenario planning for UAVs. In Proceedings of the 2016 Annual IEEE Systems Conference (SysCon), Orlando, FL, USA, 18–21 April 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Fasano, G.; Accado, D.; Moccia, A.; Moroney, D. Sense and avoid for unmanned aircraft systems. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 82–110. [Google Scholar] [CrossRef]
- Zimmerman, J. ADS-B 101: What It Is and Why You Should Care. Air Facts Journal. January 2013. [Online]. Available online: https://airfactsjournal.com/2013/01/ads-b-101-what-it-is-and-why-you-should-care/ (accessed on 12 June 2023).
- Lim, C.; Li, B.; Ng, E.M.; Liu, X.; Low, K.H. Three-dimensional (3D) dynamic obstacle perception in a detect-and-avoid framework for unmanned aerial vehicles. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Müller, T. Robust drone detection for day/night counter-UAV with static VIS and SWIR cameras. In Proceedings of the Ground/Air Multisensor Interoperability, Integration, and Networking for Persistent ISR VIII, Anaheim, CA, USA, 10–13 April 2017; SPIE: Bellingham, WA, USA, 2017. [Google Scholar]
- National Civil Aviation Agency—Brazil. Drones and Meteorology; National Civil Aviation Agency: Brasilia, Brazil, 2020.
- Dai, X.; Ke, C.; Quan, Q.; Cai, K.-Y. RFlySim: Automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations. Aerosp. Sci. Technol. 2021, 114, 106727. [Google Scholar] [CrossRef]
- Object Management Group (Standard Development Organization). OMG System Modeling Language. In SysML; Object Management Group: Milford, MA, USA, 2023. [Google Scholar]
- Holt, J.; Perry, S. What is SysML? In SysML for Systems Engineering: A Model-Based Approach; The Institution of Engineering and Technology, Savoy Place in London, England: London, UK, 2018; p. 110. [Google Scholar]
- Transport Canada. Regulations for Remotely Piloted Aircraft Systems (Civilian Drones); Transport Canada: Ottawa, ON, Canada, 2022; Volume 2022.
- Transport Canada. Advisory Circular (AC) No. 903-001. 2021. Available online: https://tc.canada.ca/en/aviation/reference-centre/advisory-circulars/advisory-circular-ac-no-903-001 (accessed on 26 February 2023).
- Ali, S.; Basit-Ur-Rahim, M.A.; Arif, F. Formal verification of internal block diagram of SysML for modeling real-time system. In Proceedings of the 2015 IEEE/ACIS 16th International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD), Takamatsu, Japan, 1–3 June 2015; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Rahim, M.; Hammad, A.; Boukala-Ioualalen, M. Towards the formal verification of sysml specifications: Translation of activity diagrams into modular petri nets. In Proceedings of the 2015 3rd International Conference on Applied Computing and Information Technology/2nd International Conference on Computational Science and Intelligence, Okayama, Japan, 12–16 July 2015; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Salunkhe, S.; Berglehner, R.; Rasheeq, A. Automatic transformation of SysML model to event-B model for railway CCS application. In Proceedings of the International Conference on Rigorous State-Based Methods, Ulm, Germany, 9–11 June 2021; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Szmuc, W.; Szmuc, T. Towards embedded systems formal verification translation from SysML into Petri nets. In Proceedings of the 2018 25th International Conference” Mixed Design of Integrated Circuits and System”(MIXDES), Gdynia, Poland, 21–23 June 2018; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Wang, H.; Zhong, D.; Zhao, T.; Ren, F. Integrating model checking with SysML in complex system safety analysis. IEEE Access 2019, 7, 16561–16571. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Matrice 300 RTK |
|---|---|
| C2 links management system (autopilot, manual radio control, FPV) | |
| DAA management system |
|
| Weather management system | Not described. |
| Underlined physical parts |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamkuimo, S.A.; Magalhaes, F.; Zrelli, R.; Misson, H.A.; Attia, M.B.; Nicolescu, G. Decomposition and Modeling of the Situational Awareness of Unmanned Aerial Vehicles for Advanced Air Mobility. Drones 2023, 7, 501. https://doi.org/10.3390/drones7080501
Kamkuimo SA, Magalhaes F, Zrelli R, Misson HA, Attia MB, Nicolescu G. Decomposition and Modeling of the Situational Awareness of Unmanned Aerial Vehicles for Advanced Air Mobility. Drones. 2023; 7(8):501. https://doi.org/10.3390/drones7080501
Chicago/Turabian StyleKamkuimo, Sorelle Audrey, Felipe Magalhaes, Rim Zrelli, Henrique Amaral Misson, Maroua Ben Attia, and Gabriela Nicolescu. 2023. "Decomposition and Modeling of the Situational Awareness of Unmanned Aerial Vehicles for Advanced Air Mobility" Drones 7, no. 8: 501. https://doi.org/10.3390/drones7080501
APA StyleKamkuimo, S. A., Magalhaes, F., Zrelli, R., Misson, H. A., Attia, M. B., & Nicolescu, G. (2023). Decomposition and Modeling of the Situational Awareness of Unmanned Aerial Vehicles for Advanced Air Mobility. Drones, 7(8), 501. https://doi.org/10.3390/drones7080501