1. Introduction
In order to meet the demand for broadband access at any time and in any region, not only for people but also for a wide variety of things, the 6G will build a space-air-ground integrated network (SAGIN) [
1,
2]. The deployment of UAVs as part of the aerial network component of the SAGIN can help address the challenges of constructing 6G networks. Since 6G networks will operate at higher frequencies, there are tradeoffs in coverage area, path loss, and infrastructure costs [
3,
4]. However, UAVs provide new capabilities as aerial communication nodes to complement the overall 6G network architecture. Their mobility and positioning flexibility make them well-suited for on-demand coverage and relaying in hard-to-reach areas.
UAV-assisted communications can provide wide-area IoT access to temporary hotspots and areas without terrestrial network coverage. For example, it can provide services, such as ensuring emergency communications, crop monitoring, and monitoring rare animal-inhabited areas. Moreover, by integrating communication and radar integration functions on UAVs, centimeter-level high-precision positioning and high-precision ground imaging can also be achieved. It further realizes services, such as high-precision navigation, precision agriculture, emergency rescue, and intelligent traffic scheduling. In this way, the goal of 6G communication and perception integration can be well realized, further helping to realize the true meaning of the everything intelligent connection. The integrated hardware equipment and intelligent application software can greatly reduce the energy consumption of IoTs and achieve sustainable green IoTs.
Moreover, the bandwidth, frequency overlap, and exponential increase in devices driven by 6G requirements can be mitigated through advances in UAV technology for green IoTs applications. UAVs can incorporate mmWave radios to take advantage of the abundant bandwidth at high frequencies. With wider channels above 400 MHz [
5], the throughput for UAV-based green IoT services can be significantly improved. In addition, the integration of communication and radar on UAVs can also reduce the volume, energy consumption, and cost of communication equipment and radar equipment and realize the green IoTs based on UAVs. Intelligent UAV deployment and coordination will help unlock the full potential of 6G for a wide range of transformative applications.
The efficiency of a system and the intelligence of UAVs in flight can be significantly enhanced through the application of traffic simulation and virtual testing. This is especially important in the context of IoT, where optimal resource utilization and energy efficiency are paramount. Advanced virtual simulation technologies such as DT facilitate the formulation of optimal routes for autonomous aerial vehicles and vehicular traffic, contributing to reduced energy consumption and carbon footprint, which are key goals of green IoT.
DT, due to its ability to model the entire life cycle of an operating system and synchronize with real entities, has emerged as a groundbreaking technology. The methodologies developed through DT are anticipated to find extensive applications in modern communication infrastructure, particularly in green IoT systems where real-time monitoring and management of devices can lead to significant energy savings [
6].
Realizing a network digital twin requires several potentials, including network perception, network modeling, and intelligent data processing. These advanced methodologies, central to green IoT, enable the construction of a digital twin of a physical network, which serves critical functions, such as physical network querying, virtual network evaluation, and virtual-real network interaction. This can contribute to energy-efficient network operation, a core principle of green IoT.
Despite the complexity and intricacies of intelligent UAV swarm collaboration, which considerably limit its widespread application, the utilization of DT in intelligent UAV networks is recommended. This technology can play a significant role in green IoT by enabling more efficient flight paths, reducing energy consumption, and thus enhancing the environmental sustainability of these systems.
The integration of digital twins for UAVs with cloud servers facilitates advanced route planning for UAV operators, effectively diminishing the resources and duration dedicated to path formulation. In the context of edge networks, the swift synchronization between digital twins and the mobile edge computing (MEC) platform minimizes the necessity for recurrent data exchanges. This not only amplifies energy conservation and traffic fluency for UAV users but also resonates with the ethos of green IoT [
7,
8,
9].
The requirement for multiple UAVs to communicate concurrently further complicates the already intricate wireless channel characteristics. The DT platform can provide an accurate virtual representation of UAVs’ wireless channels, thus enabling the platform to carry out reliable and energy-efficient channel modeling by employing artificial intelligence (AI) technology, an essential feature for green IoT systems. This study investigates the potential of DT technology for modeling wireless channels for UAVs using radar imaging and ray-tracing techniques, with a focus on their implications for energy efficiency in green IoT systems. Specifically, this research considers the reflection properties of incident waves by moving UAVs and the reflection effects of radio waves between multiple UAVs, both of which have significant implications for the energy efficiency and environmental sustainability of IoT systems [
10].
The rest of this paper is structured as follows.
Section 2 introduces the fundamentals of digital twin-enabled UAV networks, with a specific focus on their applications in green IoT systems.
Section 3 delves into the exploration of UAV radar imaging in the mmWave Band and
Section 4 takes this a step further by developing ray-tracing-based aerial mmWave channel modeling, a crucial aspect for energy-efficient communication in green IoT. Then,
Section 5 provides the simulation results to validate our proposed method, followed by
Section 6 to conclude this paper by summarizing the potential impacts of our findings.
2. Digital Twin-Based UAV Communications for Green IoT
For the purpose of this study, we chose a professional UAV model, the DJI Phantom 4 Pro quadcopter, produced by SZ DJI Technology Co., Ltd. (Shenzhen, China). This UAVs is a technologically advanced aerial imaging solution. Its 1-inch CMOS sensor allows 20 MP and 4 K/60 fps video capture, while the OcuSync 2.0 system guarantees reliable connectivity. Enhanced with five-direction obstacle sensing for safety and a specialized remote controller for precision, this drone’s intelligent features streamline its operation, making it a preferred choice for professional creators.
Figure 1 provides a schematic representation of the measurement setup, which includes a UAVs being tested and a radar front-end that is supported by a tripod and connected via microwave wires [
11,
12].
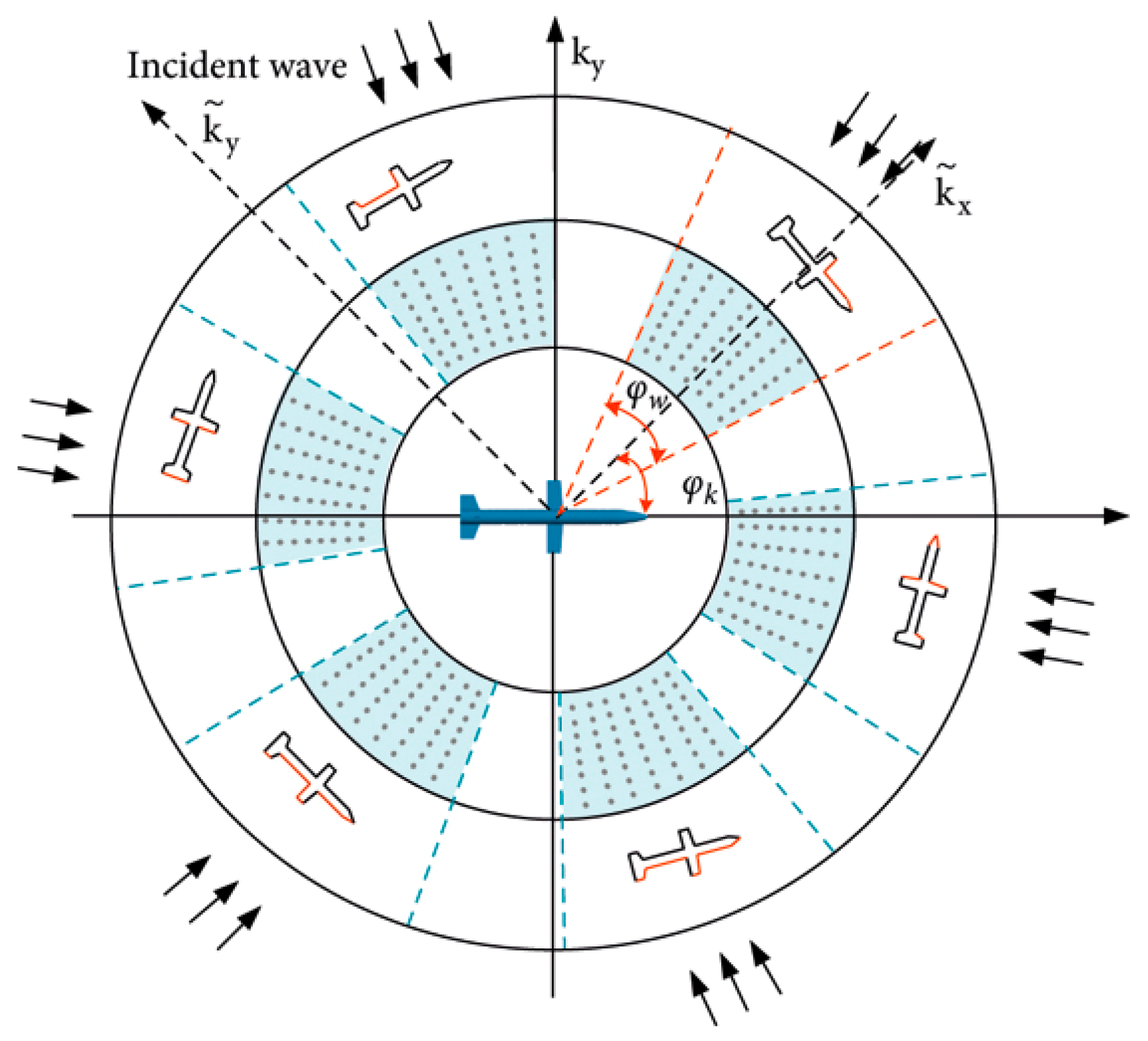
The significance of UAV specification in radar imaging lies in augmenting the perception and recognition capabilities of UAVs, which, in turn, fosters enhanced flight safety and mission execution efficiency [
13]. Radar imaging, as an active sensing technology, employs the transmission of radar signals and the reception of reflected signals to ascertain information pertaining to the distance, direction, and speed of a target.
The DT concept is a burgeoning proposition that has attracted notable attention in recent years, particularly within the context of IoT [
8]. DT’s ability to faithfully replicate physical systems on digital platforms offers substantial potential for augmenting the energy efficiency and sustainability of IoT systems [
14].
Currently, the most salient applications of DT are manifested in engineering and construction, with intense research and focus being channeled towards its utilization in intelligent manufacturing, including the fabrication of energy-efficient IoT devices [
15]. DT encompasses a diverse range of data types, such as physical models, sensor updates, and operational histories. It synthesizes multi-disciplinary, multi-physical, multi-scale, and multi-probability simulation processes, thereby achieving a virtual mapping. This facilitates the monitoring and optimization of the entire lifecycle of corresponding physical equipment, aligning with the principles of green IoT and resulting in significant energy savings [
16].
DT transcends mere conceptualization and may be considered a comprehensive digital mapping system for one or more essential and interdependent equipment systems, inclusive of those engaged in green IoT [
17]. As a universally applicable theoretical and technical system, DT has vast potential applications across various domains. Its relevance to green IoT is pronounced, enabling the creation of more energy-efficient products in design and manufacturing, reducing energy consumption in medical analyses, and fostering the development of sustainable structures in engineering construction.
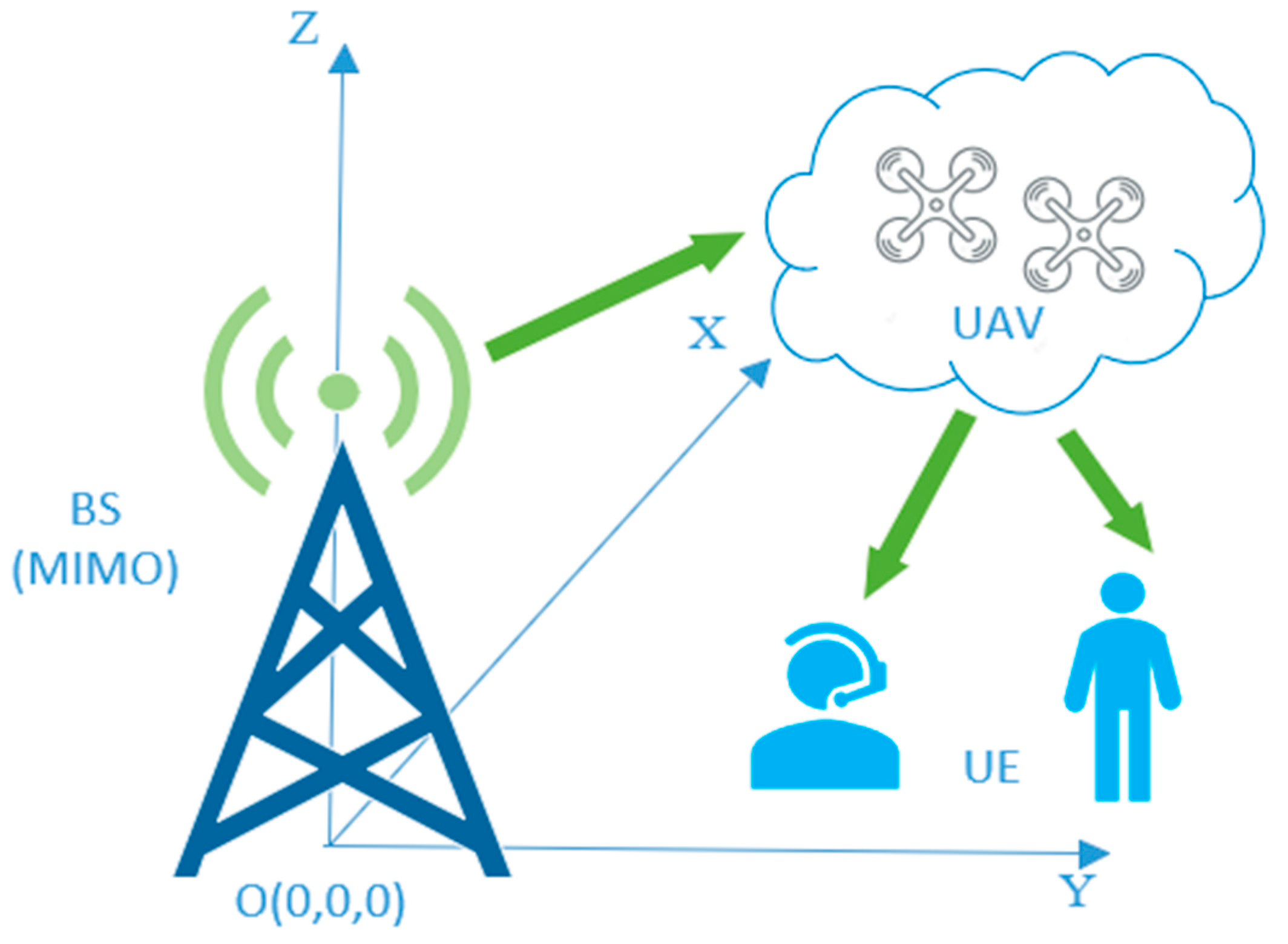
As depicted in
Figure 2, a UAVs physically integrates several components, such as NVIDIA’s physics engine, moments, rigid bodies, and joints. This not only allows for a realistic simulation of the UAVs’ six degrees of freedom but also enables the optimization of the UAVs’ energy consumption, making it a key tool for green IoT. The force and moment components, extensively utilized in propellers and motors, can be optimized for energy efficiency. The joint components aid in connecting the internal parts of the UAVs, and their efficient design can contribute to the overall energy efficiency of the UAVs, an important consideration in green IoT [
18].
The physics of multi-rotor UAVs encompasses both internal forces and external forces resulting from contact with other objects. These dynamics play a vital role in the context of IoT, where efficient energy use and sustainable operations are paramount. The physical motion of a multi-rotor UAVs is primarily governed by the differential in propeller speeds. A significant consequence of the disparate speeds of the propellers is a shift in the UAV’s total thrust across all directions [
19]. This, in turn, allows for precise adjustments to the UAV’s acceleration and attitude angles in all directions, leading to an optimized state of mobility. This optimization can contribute to energy savings, which is a key objective in green IoT.
In intelligent UAV networking based on DT, the closed-loop interaction between the digital and physical domains enables UAVs to swiftly adapt to complex and dynamic environments. This facilitates the autonomous execution of advanced functions, such as trajectory optimization and resource allocation, both crucial for energy efficiency in green IoT systems [
20]. In order to ensure precise DT modeling and meet the data volume requirements for simulation verification, base stations necessitate extensive bandwidths and high transmission rates, which can lead to efficient and sustainable data service responses.
Data of varying values can be distributed across core clouds, edge computing devices, and terminal devices, optimizing resource use and energy consumption. AI technology can then perform data value mining, enabling dynamic scenario adaptation and intelligent policy optimization, key features in the pursuit of green IoT.
The DT of the UAV network, being its digital mirror, replicates the same environment, UAVs, topologies, and various data as the actual UAV network. It serves as a sophisticated “replica” of the actual network [
10], providing a platform for energy-efficient operation, a critical aspect of green IoT. The DT application platform can provide a digital verification environment that closely resembles the actual UAV network, allowing for the optimization of energy-efficient UAV path planning, driving strategy, and network operation and maintenance.
The reliability of AI models and pre-validation results trained on the DT application platform surpasses that of traditional simulation platforms. Consequently, as depicted in
Figure 2, the AI intelligent decisions, which are trained on the DT application platform, can be directly dispatched to the actual UAVs via the MEC server. This integration allows UAVs to make real-time, informed, and energy-efficient decisions without human intervention, an important consideration in green IoT.
The amalgamation of DT and MEC servers within UAV networks can culminate in augmented performance, heightened safety, and decreased expenditures. These outcomes are congruous with the guiding principles of IoT. Therefore, the utilization of DT and MEC servers represents a pivotal approach to furthering the objectives of green IoT, particularly in relation to the promotion of efficient and sustainable operations.
5. Simulation Study on DT-Based UAV Networks
The simulation scenarios of DT-based UAV network are shown in
Figure 7. The provided parameter values represent characteristics and specifications of a communication system involving antenna elements, beamwidth, gain, physical separation, bandwidth, carrier frequency, transmit power range, channel path loss index, AWGN spectral density, and noise figure. The communication system utilizes 512 antenna elements arranged in a 3-dimensional array with dimensions of 16 × 16 × 2. Each antenna element supports 256 elements per polarization. The beamwidth of the antenna is 90 degrees at −3 dB. The maximum gain of the antenna is 5 dBi. The physical separation between adjacent antenna elements is 0.5 wavelengths (λ). The communication system has a net transfer bandwidth of 800 MHz. The communication system operates at a carrier frequency of 100 GHz. The system’s transmit power can be adjusted within a range of 40–100 W. The channel path loss index is 3. The spectral density of AWGN in the channel is −170 dBm/Hz. The noise figure of the system is 5 dB.
Subsequently, simulation experiments are conducted on the proposed use cases (Use case 1: UAV flies along a straight line and Use case 2: UAV flies along a 30-degree inclined path). In each experiment, a comparative analysis is performed between the designed scheme and the finite-difference time-domain (FDTD) model to assess their respective performances. The use of actual radar measurements can be utilized to validate and verify the results obtained from the FDTD model.
“Use case 1: UAV flies along a straight line” represents a fundamental and commonly encountered scenario in UAV operations. In this case, the UAV follows a linear trajectory without any deviations, which allows us to study the basic channel characteristics and evaluate the impact of path loss and fading in a straightforward setting. Understanding the channel behavior in this scenario provides a foundation for comparison and benchmarking against more complex flight paths. On the other hand, “Use case 1: UAV flies along a 30-degree inclined path” introduces an essential element of real-world UAV applications, non-linear flight paths. Many practical UAV missions involve navigating through varying terrain, avoiding obstacles, or following specific routes for surveillance and data collection. By simulating an inclined path, we can investigate the effects of elevation changes on signal propagation, assess the impact of obstacles or terrain irregularities, and gain insights into the implications for communication link quality and performance. These chosen scenarios reflect crucial aspects of UAV networks in realistic operating conditions. By focusing on a straight-line flight and an inclined path, we cover both simple and complex flight trajectories, allowing us to draw meaningful conclusions about the UAV communication channel’s behavior across various operational scenarios. This approach enables us to design more robust communication protocols, antenna configurations, and network strategies tailored to the challenges presented by real-world UAV deployments. The combination of these distinct scenarios in our simulation analysis ensures that the derived channel model is practical, comprehensive, and capable of supporting the optimization of UAV network performance in diverse and dynamic environments.
The two approaches, actual radar imaging and FDTD models, can be employed to derive the channel model of UAVs. Both actual radar imaging and FDTD models can be employed to derive the channel model of UAVs. Actual radar imaging involves collecting real-world radar data and analyzing it to accurately describe the signal propagation characteristics, including path loss, multipath effects, and fading, between the radar transmitter and the UAV receiver. Despite its advantages in realism and comprehensiveness, this method may not be suitable for all scenarios due to its high cost, complexity, and limitations in results. On the other hand, FDTD models are numerical methods used to solve Maxwell’s equations and simulate electromagnetic wave propagation in a given environment. In the context of deriving the UAV channel model, FDTD models simulate the electromagnetic behavior between the radar transmitter and the UAV receiver based on the geometry of the surroundings. This approach offers advantages in flexibility and cost-effectiveness, as it can be applied to various scenarios and UAV configurations. However, FDTD models also have limitations, such as simplified assumptions and high computational requirements, which may result in some degree of accuracy loss. In practical applications, a combination of both approaches may be used to obtain a more comprehensive and accurate UAV channel model. Actual radar imaging provides valuable data for validating and calibrating the FDTD models, while FDTD models allow for exploring a wider range of scenarios and conditions without the constraints of physical experiments.
5.1. Use Case 1: UAV Flies along a Straight Line
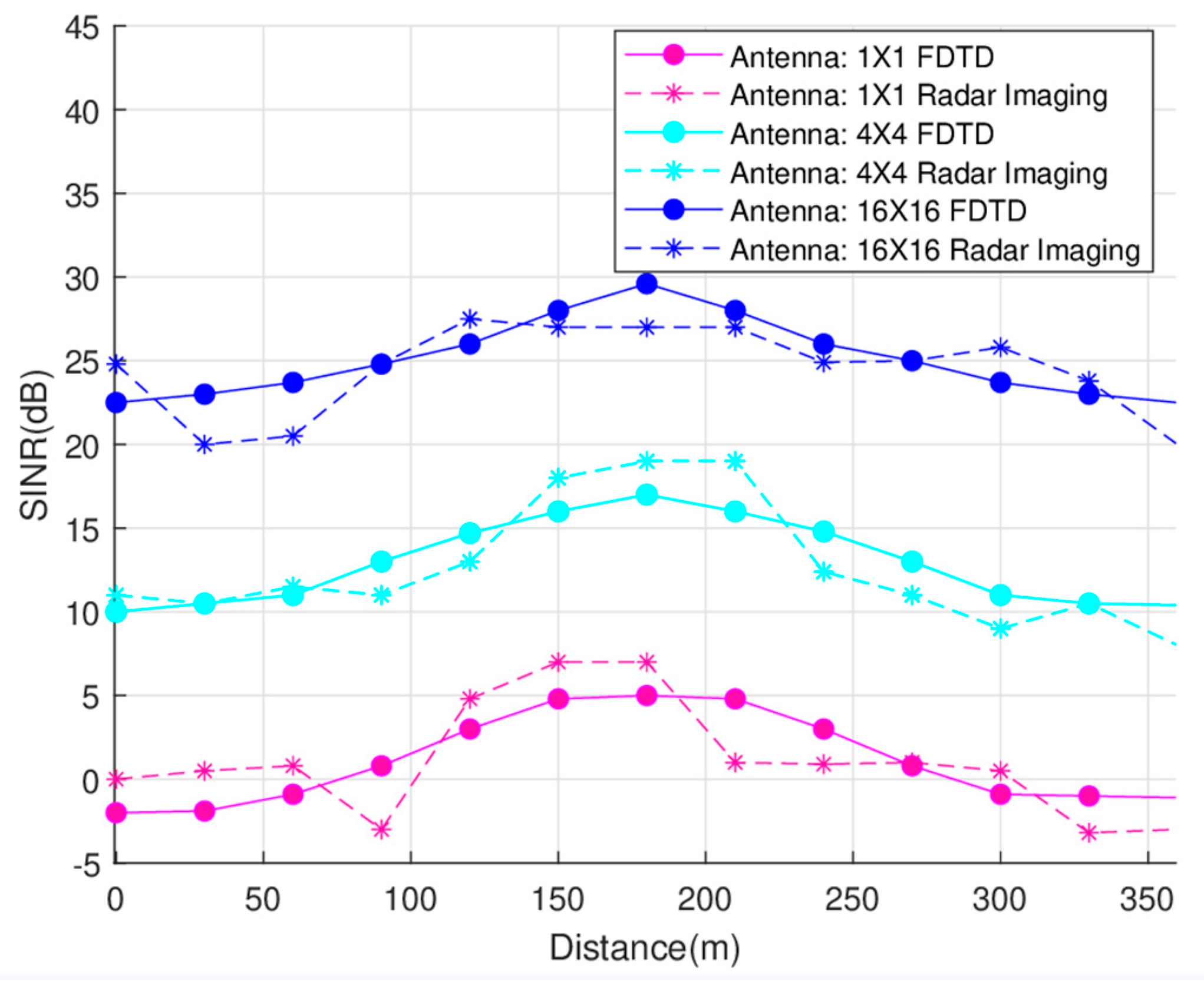
Figure 8 depicts the SINR as a function of the UAVs’ location or distance along a straight line for different numbers of transmit antennas: 1, 16, and 256 antennas, respectively. Notably, when the number of antennas is increased to 256, the beamforming gain experiences a substantial rise, resulting in a significant increase in SINR. The solid line in
Figure 8 represents the SINR data obtained through the FDTD approach, while the dashed line corresponds to the results derived from RF imaging. Remarkably, the findings predominantly exhibit a close match, effectively capturing the correct trend, thus reaffirming their reliability and mutual consistency. In
Figure 9, the relationship between throughput and the UAVs’ location is presented. The results demonstrate a close alignment between the data obtained through the FDTD method and the measured values. This compelling agreement validates the validity and soundness of our approach to radar imaging for RF digital twin modeling.
5.2. Use Case 2: UAV Flies along a 30-Degree Inclined Path
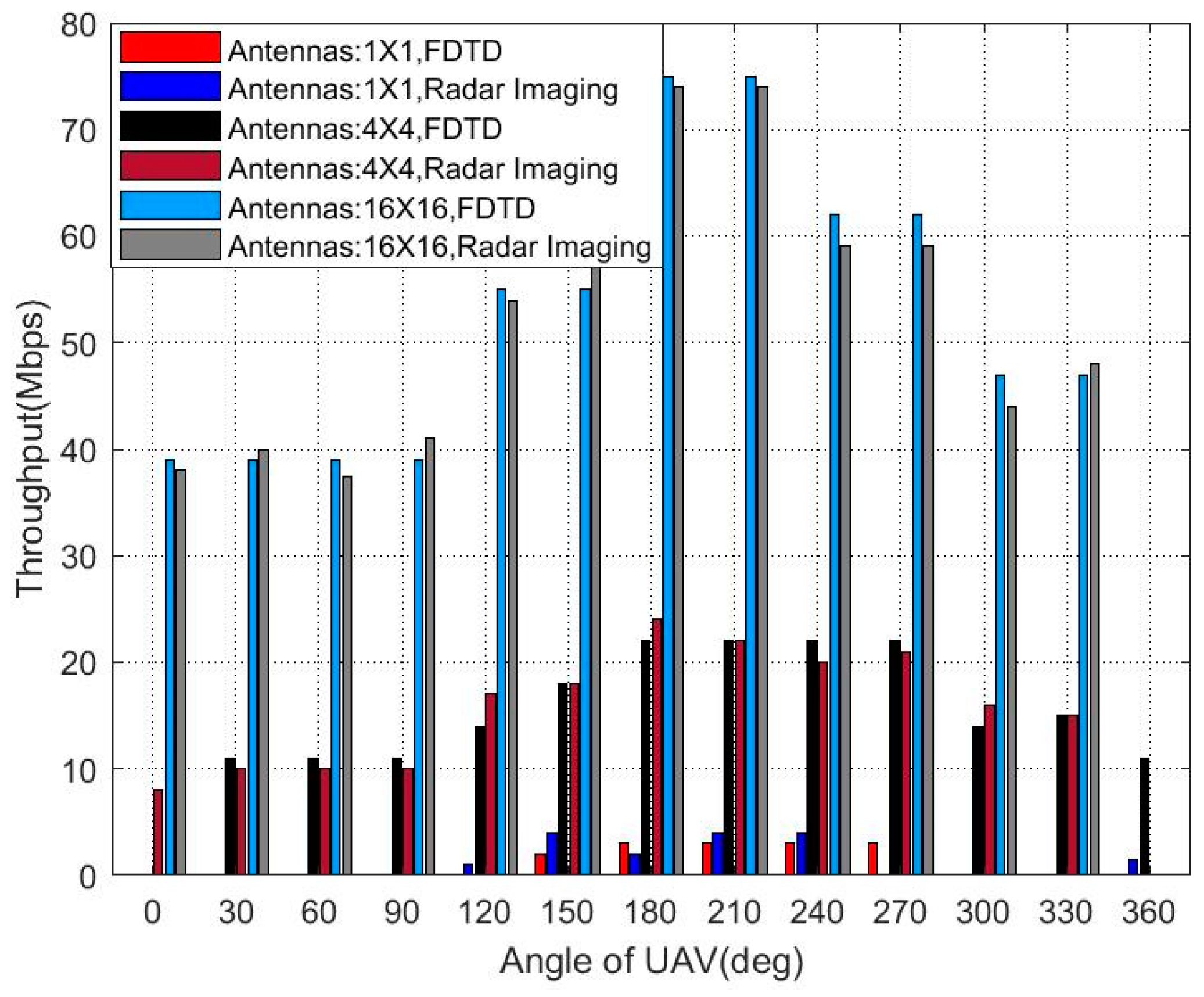
In
Figure 10, we present the SINR results, while
Figure 11 showcases the throughput outcomes. The UAVs’ flight trajectory incorporates a 30-degree inclination angle, which introduces asymmetry in its distance from both the user equipment (UE) and the base station (BS). As a consequence of this asymmetry, the SINR and throughput results exhibit variations across the entire 360-degree range. The noticeable asymmetrical patterns in both figures underscore the significant influence of the UAVs’ flight angle on the communication system’s performance. These findings emphasize the importance of considering such flight angles in the design and evaluation of UAV communication systems, as they play a crucial role in determining overall communication quality and efficiency.
When comparing the results for straight and inclined path scenarios in UAV communication channel models, several patterns and differences emerge that reveal the impact of flight trajectories on signal propagation. In straight-line scenarios, changes in signal strength along a linear trajectory are attenuated. However, in oblique path scenarios, significant differences are observed. When the drone rises along a 30-degree slope, the signal strength roughly shows a trend of first rising and then falling. Understanding these patterns and differences is critical for designing adaptive communication strategies that can adapt to varying channel conditions, especially when UAVs traverse complex terrain or follow non-linear flight paths in real-world applications. By comparing the results of these different scenarios, researchers and engineers can gain insight into the performance constraints and opportunities for optimizing UAV communication networks under different operating conditions.
The validation process involving the use of actual radar measurements to validate and verify the results obtained from the FDTD model is a critical step in ensuring the accuracy and reliability of the simulated UAV communication channel. The process works by conducting real-world radar measurements in the same environment where UAVs operate. These measurements capture the actual electromagnetic behavior, including signal propagation, reflections, and scattering effects. The FDTD model is then used to simulate the same scenario by taking into account the same geometric parameters and frequency bands used during the radar measurements. By comparing the simulation results with the actual radar data, researchers can assess the accuracy of the FDTD model’s predictions. A close match between the simulation and real-world measurements indicates that the FDTD model accurately represents the UAV communication channel’s behavior, providing confidence in its application for designing and optimizing UAV communication systems. Furthermore, this validation process allows for model improvements based on discrepancies identified during comparison, enhancing the model’s reliability and its generalizability to different UAV scenarios and environments. Ultimately, the use of actual radar measurements for validation ensures that the FDTD model is a robust and reliable tool for supporting the development of efficient and effective UAV communication networks in real-world settings.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










