

Finite-Time Robust Flight Control of Logistic Unmanned Aerial Vehicles Using a Time-Delay Estimation Technique

 , ,
, ,
Abstract
:1. Introduction
- Construction of a cascaded dual-loop SMC controller. The inner loop adopts the fast nonsingular terminal sliding mode to achieve the finite-time convergence of the system state and improve the response speed. The outer loop employs a PID-type sliding mode surface to enhance the control accuracy.
- TDE technology is introduced for the robust control of rotor logistic UAVs to achieve the online estimation and real-time compensation of unknown disturbances, thereby improving the nominal dynamic model of the controlled object.
- Flight capability tests of the rotor logistic UAV are conducted in three complex scenarios to verify the ability of the proposed algorithm to hover, maneuver flight, and perform self-recovery during fault tolerance.
2. Dynamic Modeling of Quadcopter UAVs
3. Controller Design and Stability Analysis
3.1. Position Loop Controller Design
3.2. Design of the Attitude Control System
3.3. Stability Analysis of the FNTSM-TDE Controller
4. Simulation and Experimentation
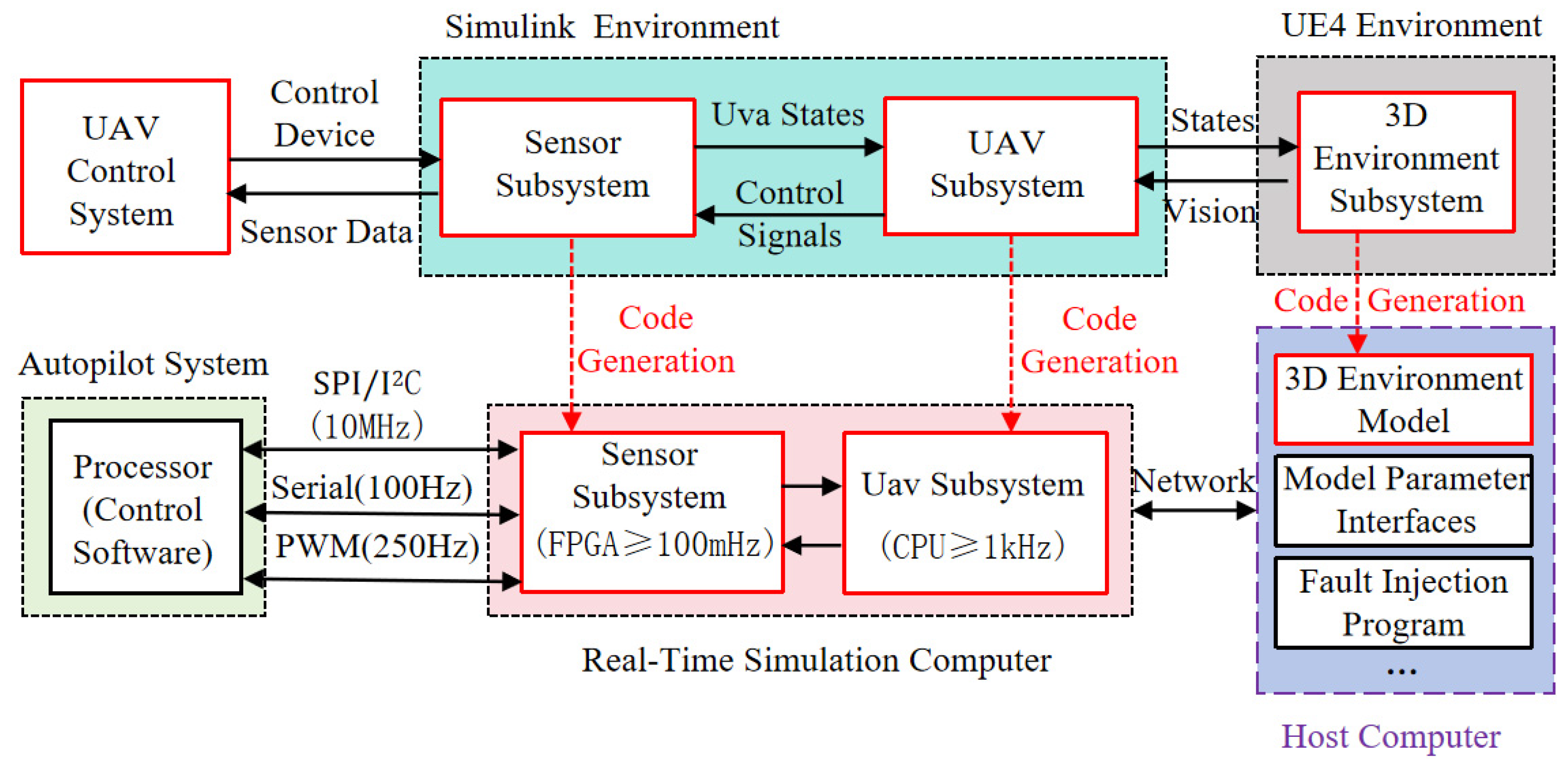
4.1. MBD-HIL UAV Development Strategy
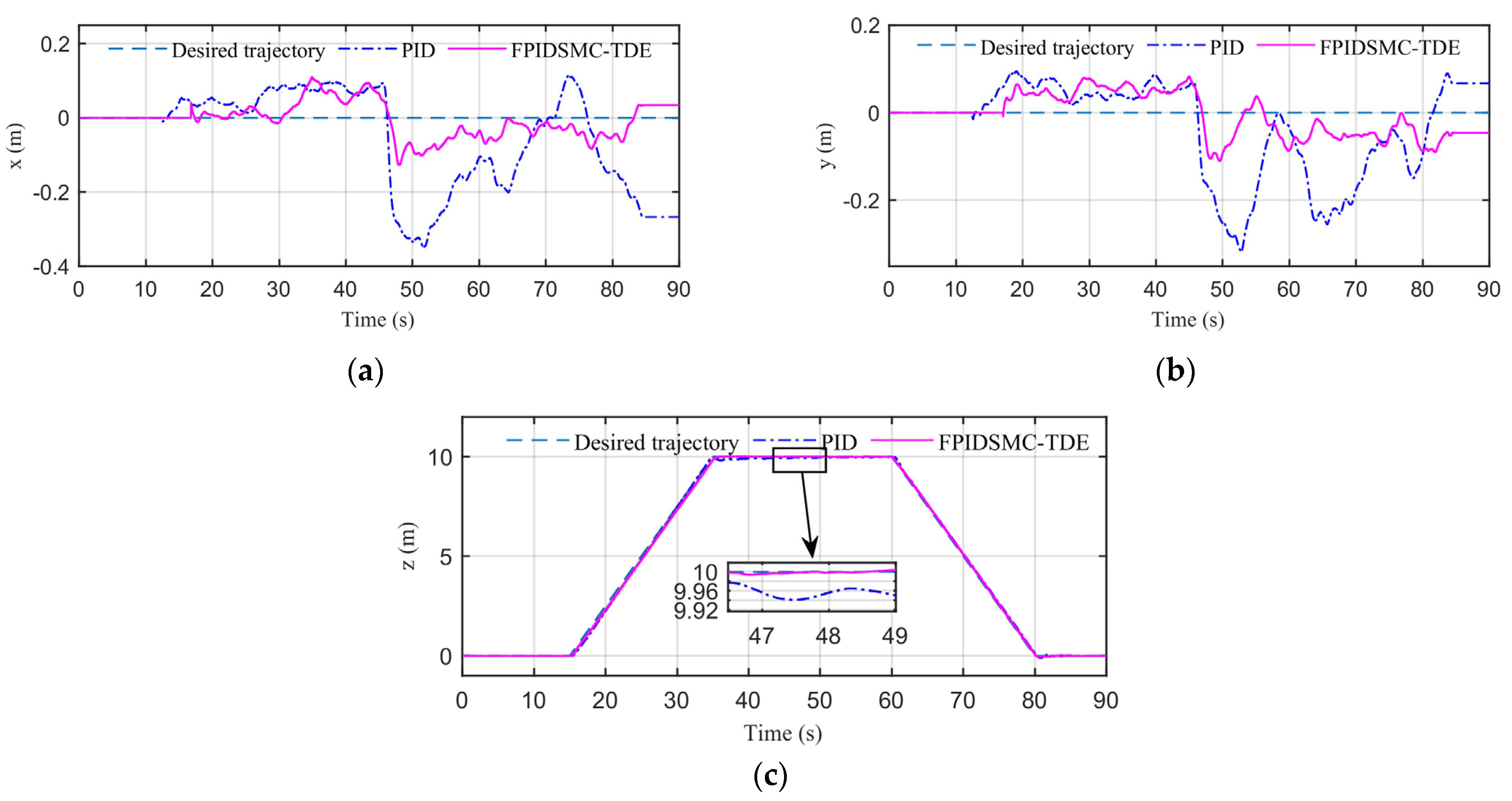
4.1.1. HIL for the Hovering Experiment
4.1.2. HIL Experiment for the Crash Recovery
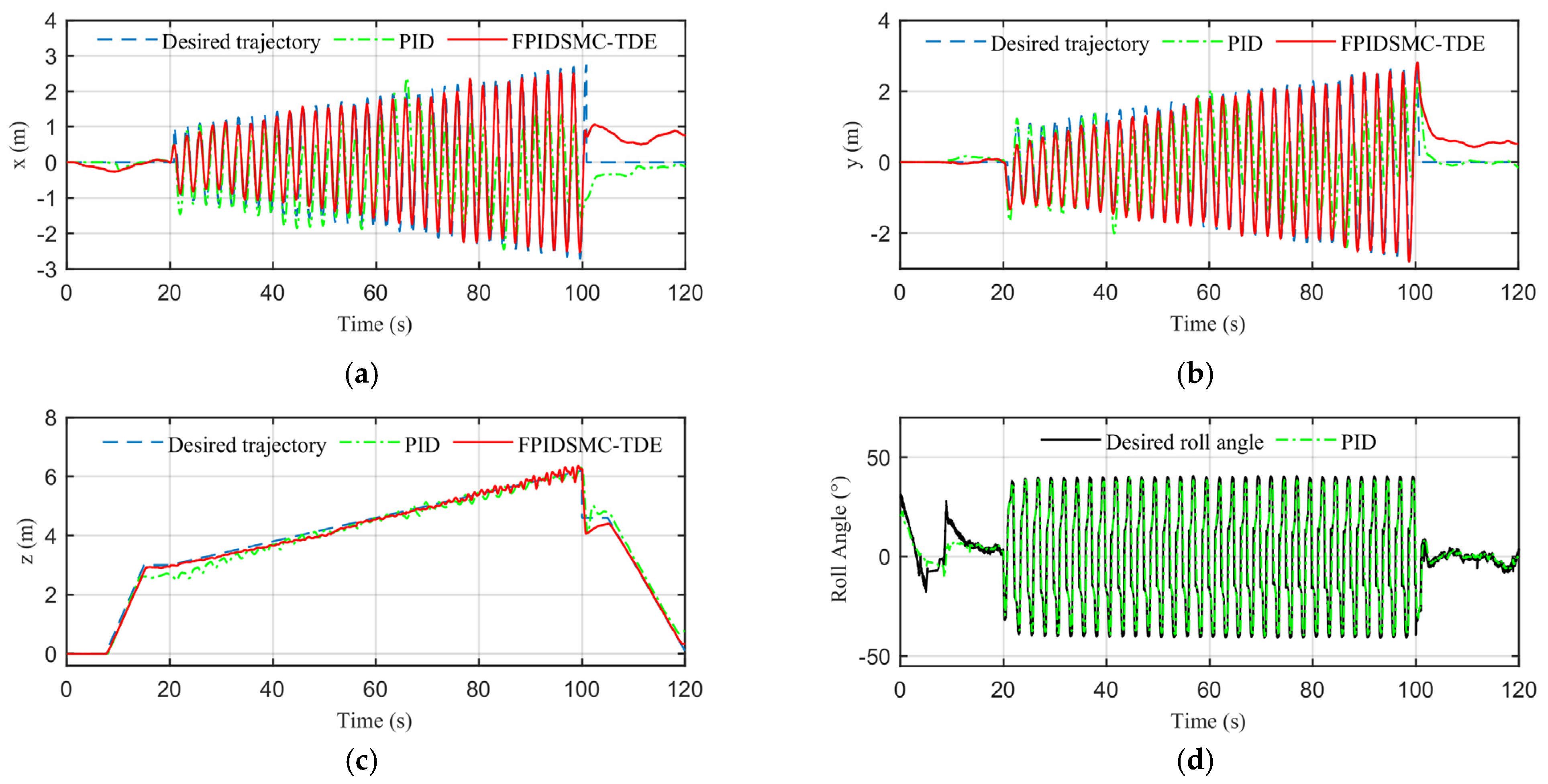
4.1.3. HIL for High Maneuverability Flight
4.2. In-Flight Experiments
4.2.1. The In-Flight Hover Experiment
4.2.2. The Actual Flight Crash Experiment
4.2.3. High Maneuverability Flight Field Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhai, D.; Wang, C.; Cao, H.; Garg, S.; Hassan, M.M.; AlQahtani, S.A. Deep neural network based UAV deployment and dynamic power control for 6G-Envisioned intelligent warehouse logistics system. Future Gener. Comput. Syst. 2022, 137, 164–172. [Google Scholar] [CrossRef]
- Eun, J.; Song, B.D.; Lee, S.; Lim, D.E. Mathematical investigation on the sustainability of UAV logistics. Sustainability 2019, 11, 5932. [Google Scholar] [CrossRef]
- Elmokadem, T.; Savkin, A.V. Towards fully autonomous UAVs: A survey. Sensors 2021, 21, 6223. [Google Scholar] [CrossRef] [PubMed]
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, J.; Ahn, C.K.; Xiang, Z. Neural adaptive distributed formation control of nonlinear multi-UAVs with unmodeled dynamics. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 9555–9561. [Google Scholar] [CrossRef] [PubMed]
- Garofano-Soldado, A.; Sanchez-Cuevas, P.J.; Heredia, G.; Ollero, A. Numerical-experimental evaluation and modelling of aerodynamic ground effect for small-scale tilted propellers at low Reynolds numbers. Aerosp. Sci. Technol. 2022, 126, 107625. [Google Scholar] [CrossRef]
- Pan, Y.; Chen, Q.; Zhang, N.; Li, Z.; Zhu, T.; Han, Q. Extending delivery range and decelerating battery aging of logistics UAVs using public buses. IEEE Trans. Mob. Comput. 2022, 22, 5280–5295. [Google Scholar] [CrossRef]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A detailed survey and future directions of unmanned aerial vehicles (uavs) with potential applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
- Liang, S.; Zhang, S.; Huang, Y.; Zheng, X.; Cheng, J.; Wu, S. Data-driven fault diagnosis of FW-UAVs with consideration of multiple operation conditions. ISA Trans. 2022, 126, 472–485. [Google Scholar] [CrossRef]
- Bateman, F.; Noura, H.; Ouladsine, M. Fault diagnosis and fault-tolerant control strategy for the aerosonde UAV. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2119–2137. [Google Scholar] [CrossRef]
- Zheng, E.H.; Xiong, J.J.; Luo, J.L. Second order sliding mode control for a quadrotor UAV. ISA Trans. 2014, 53, 1350–1356. [Google Scholar] [CrossRef] [PubMed]
- Xuan-Mung, N.; Hong, S.K. Improved altitude control algorithm for quadcopter unmanned aerial vehicles. Appl. Sci. 2019, 9, 2122. [Google Scholar] [CrossRef]
- Kazim, M.; Azar, A.T.; Koubaa, A.; Zaidi, A. Disturbance-rejection-based optimized robust adaptive controllers for UAVs. IEEE Syst. J. 2021, 15, 3097–3108. [Google Scholar] [CrossRef]
- Borase, R.P.; Maghade, D.K.; Sondkar, S.Y.; Pawar, S.N. A review of PID control, tuning methods and applications. Int. J. Dyn. Control 2021, 9, 818–827. [Google Scholar] [CrossRef]
- Meier, L.; Tanskanen, P.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision. Auton. Robot. 2012, 33, 21–39. [Google Scholar] [CrossRef]
- Okasha, M.; Kralev, J.; Islam, M. Design and Experimental Comparison of PID, LQR and MPC Stabilizing Controllers for Parrot Mambo Mini-Drone. Aerospace 2022, 9, 298. [Google Scholar] [CrossRef]
- Kim, H.S.; Lee, K.; Joo, Y.H. Decentralized sampled-data fuzzy controller design for a VTOL UAV. J. Frankl. Inst. 2021, 358, 1888–1914. [Google Scholar] [CrossRef]
- Dumitrescu, C.; Ciotirnae, P.; Vizitiu, C. Fuzzy logic for intelligent control system using soft computing applications. Sensors 2021, 21, 2617. [Google Scholar] [CrossRef]
- Peitz, S.; Dellnitz, M. A survey of recent trends in multiobjective optimal control—Surrogate models, feedback control and objective reduction. Math. Comput. Appl. 2018, 23, 30. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.; Hussain, S.S.; Ustun, T.S.; Sarker, M.R.; Hannan, M.A.; Mohamed, R.; Ali, J.A.; Mekhilef, S.; Milad, A. Artificial neural networks based optimization techniques: A review. Electronics 2021, 10, 2689. [Google Scholar] [CrossRef]
- Effati, S.; Pakdaman, M. Optimal control problem via neural networks. Neural Comput. Appl. 2013, 23, 2093–2100. [Google Scholar] [CrossRef]
- Xie, M.; Yu, S.; Lin, H.; Ma, J.; Wu, H. Improved sliding mode control with time delay estimation for motion tracking of cell puncture mechanism. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 3199–3210. [Google Scholar] [CrossRef]
- Abro, G.E.M.; Zulkifli, S.A.B.; Asirvadam, V.S.; Ali, Z.A. Model-free-based single-dimension fuzzy SMC design for underactuated quadrotor UAV. Actuators 2021, 10, 191. [Google Scholar] [CrossRef]
- Wang, X.; van Kampen, E.-J.; Chu, Q. Quadrotor fault-tolerant incremental nonsingular terminal sliding mode control. Aerosp. Sci. Technol. 2019, 95, 105514. [Google Scholar] [CrossRef]
- Yu, S.; Xie, M.; Wu, H.; Ma, J.; Li, Y.; Gu, H. Composite proportional-integral sliding mode control with feedforward control for cell puncture mechanism with piezoelectric actuation. ISA Trans. 2022, 124, 427–435. [Google Scholar] [CrossRef]
- Lin, J.; Zheng, R.; Zhang, Y.; Feng, J.; Li, W.; Luo, K. CFHBA-PID algorithm: Dual-loop PID balancing robot attitude control algorithm based on complementary factor and honey badger algorithm. Sensors 2022, 22, 4492. [Google Scholar] [CrossRef]
- Maurya, P.; Morishita, H.M.; Pascoal, A.; Aguiar, A.P. A path-following controller for marine vehicles using a two-scale inner-outer loop approach. Sensors 2022, 22, 4293. [Google Scholar] [CrossRef] [PubMed]
- Yu, S.; Wu, H.; Xie, M.; Lin, H.; Ma, J. Precise robust motion control of cell puncture mechanism driven by piezoelectric actuators with fractional-order nonsingular terminal sliding mode control. Bio-Des. Manuf. 2020, 3, 410–426. [Google Scholar] [CrossRef]
- Khan MY, A.; Liu, H.; Habib, S.; Khan, D.; Yuan, X. Design and performance evaluation of a step-up DC–DC converter with dual loop controllers for two stages grid connected PV inverter. Sustainability 2022, 14, 811. [Google Scholar] [CrossRef]
- Abbas, W.K.A.; Vrabec, J. Cascaded dual-loop organic Rankine cycle with alkanes and low global warming potential refrigerants as working fluids. Energy Convers. Manag. 2021, 249, 114843. [Google Scholar] [CrossRef]
- Ma, J.; Xie, M.; Chen, P.; Yu, S.; Zhou, H. Motion tracking of a piezo-driven cell puncture mechanism using enhanced sliding mode control with neural network. Control Eng. Pract. 2023, 134, 105487. [Google Scholar] [CrossRef]
- Hou, Z.; Lu, P.; Tu, Z. Nonsingular terminal sliding mode control for a quadrotor UAV with a total rotor failure. Aerosp. Sci. Technol. 2020, 98, 105716. [Google Scholar] [CrossRef]
- Hassani, H.; Mansouri, A.; Ahaitouf, A. Performance evaluation of an improved non-singular sliding mode attitude control of a perturbed quadrotor: Experimental validation. J. Vib. Control 2023, 10775463231161848. [Google Scholar] [CrossRef]
- Xiao, L.; Ma, L.; Huang, X. Intelligent fractional-order integral sliding mode control for PMSM based on an improved cascade observer. Front. Inf. Technol. Electron. Eng. 2022, 23, 328–338. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Novel robust super twisting integral sliding mode controller for a quadrotor under external disturbances. Int. J. Dyn. Control 2020, 8, 805–815. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Liu, G.P. Delay compensation-based state estimation for time-varying complex networks with incomplete observations and dynamical bias. IEEE Trans. Cybern. 2021, 52, 12071–12083. [Google Scholar] [CrossRef] [PubMed]
- LaForest, L.; Hasheminasab, S.M.; Zhou, T.; Flatt, J.E.; Habib, A. New strategies for time delay estimation during system calibration for UAV-based GNSS/INS-assisted imaging systems. Remote Sens. 2019, 11, 1811. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Bullock, D.; Johnson, B.; Wells, R.B.; Kyte, M.; Li, Z. Hardware-in-the-loop simulation. Transp. Res. Part C Emerg. Technol. 2004, 12, 73–89. [Google Scholar] [CrossRef]
- Gaviani, G.; Gentile, G.; Stara, G.; Romagnoli, L.; Thomsen, T.; Ferrari, A. From conception to implementation: A model based design approach. IFAC Proc. Vol. 2004, 37, 29–34. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhong, R.; Cui, L. Intelligent recognition of spacecraft components from photorealistic images based on Unreal Engine 4. Adv. Space Res. 2023, 71, 3761–3774. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Acceleration due to gravity g) | 9.8 | ) | 0.0104 |
| UAV mass m/kg | 0.752 | ) | 0.0251 |
| UAV arm length l/m | 0.125 | 0.0165 | |
| ) | 0.0056 | 0.0624 | |
| ) | 0.0056 | 1.184 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Yu, S.; Hu, W.; Wu, H.; Li, X.; Zheng, Y.; Zhang, J.; Chen, P. Finite-Time Robust Flight Control of Logistic Unmanned Aerial Vehicles Using a Time-Delay Estimation Technique. Drones 2024, 8, 58. https://doi.org/10.3390/drones8020058
Ma J, Yu S, Hu W, Wu H, Li X, Zheng Y, Zhang J, Chen P. Finite-Time Robust Flight Control of Logistic Unmanned Aerial Vehicles Using a Time-Delay Estimation Technique. Drones. 2024; 8(2):58. https://doi.org/10.3390/drones8020058
Chicago/Turabian StyleMa, Jinyu, Shengdong Yu, Wenke Hu, Hongyuan Wu, Xiaopeng Li, Yilong Zheng, Junhui Zhang, and Puhui Chen. 2024. "Finite-Time Robust Flight Control of Logistic Unmanned Aerial Vehicles Using a Time-Delay Estimation Technique" Drones 8, no. 2: 58. https://doi.org/10.3390/drones8020058
APA StyleMa, J., Yu, S., Hu, W., Wu, H., Li, X., Zheng, Y., Zhang, J., & Chen, P. (2024). Finite-Time Robust Flight Control of Logistic Unmanned Aerial Vehicles Using a Time-Delay Estimation Technique. Drones, 8(2), 58. https://doi.org/10.3390/drones8020058