
Modeling, Guidance, and Robust Cooperative Control of Two Quadrotors Carrying a “Y”-Shaped-Cable-Suspended Payload


Abstract
:1. Introduction
- We propose a novel “Y”-shaped suspension method to improve payload carrying and dropping efficiency, and a payload swing model is derived specifically for the “Y”-shaped suspension to show explicitly how swing disturbance affects the motion of the quadrotors.
- A novel, comprehensive design of the guidance law and UDE-based cooperative control is proposed for the “Y”-shaped quadrotor–payload system to achieve not only robust formation control but also high-accuracy trajectory tracking under the communication constraint of only one quadrotor having access to the global trajectory reference. Moreover, the proposed guidance law features formation transformation and flight mode variation capabilities to achieve complex flight manners, such as cooperative obstacle avoidance in a cluttered environment.
- In contrast to the frequency domain analysis [16], this paper provides a rigorous time domain-based stability and robustness analysis using singular perturbation theory, where a parameter mapping method is proposed to unify the parameter tuning of different control channels. The analysis shows that the formation trajectory tracking accuracy and robustness against payload swing disturbance are related monotonically to a single designable parameter, , by which the system performance can be easily and quantitatively improved.
2. Problem Formation
2.1. Frame Setup
2.2. Modeling of Quadrotors
2.3. Modeling of Payload Motion
2.4. Model Simplification
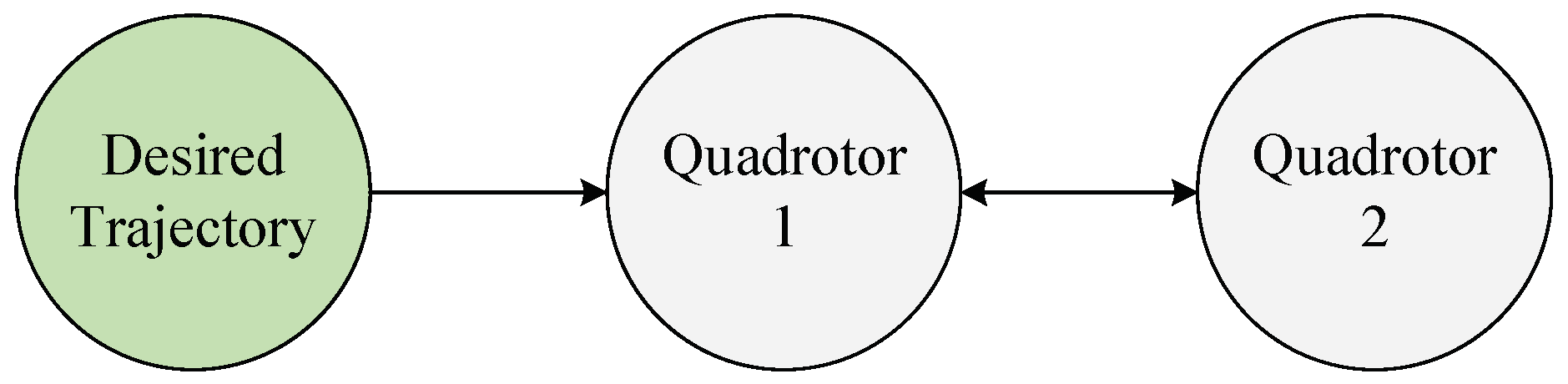
2.5. Communication Topology and Control Objectives
- (i)
- The quadrotors achieve synchronized yaw angle tracking, i.e., as ;
- (ii)
- The quadrotors asymptotically track the desired trajectory in the desired, possibly time-varying formation specified by in the absence of disturbances;
- (iii)
- In the presence of disturbances, the trajectory tracking error and the formation error can be quantitatively regulated within a small neighborhood of zero.
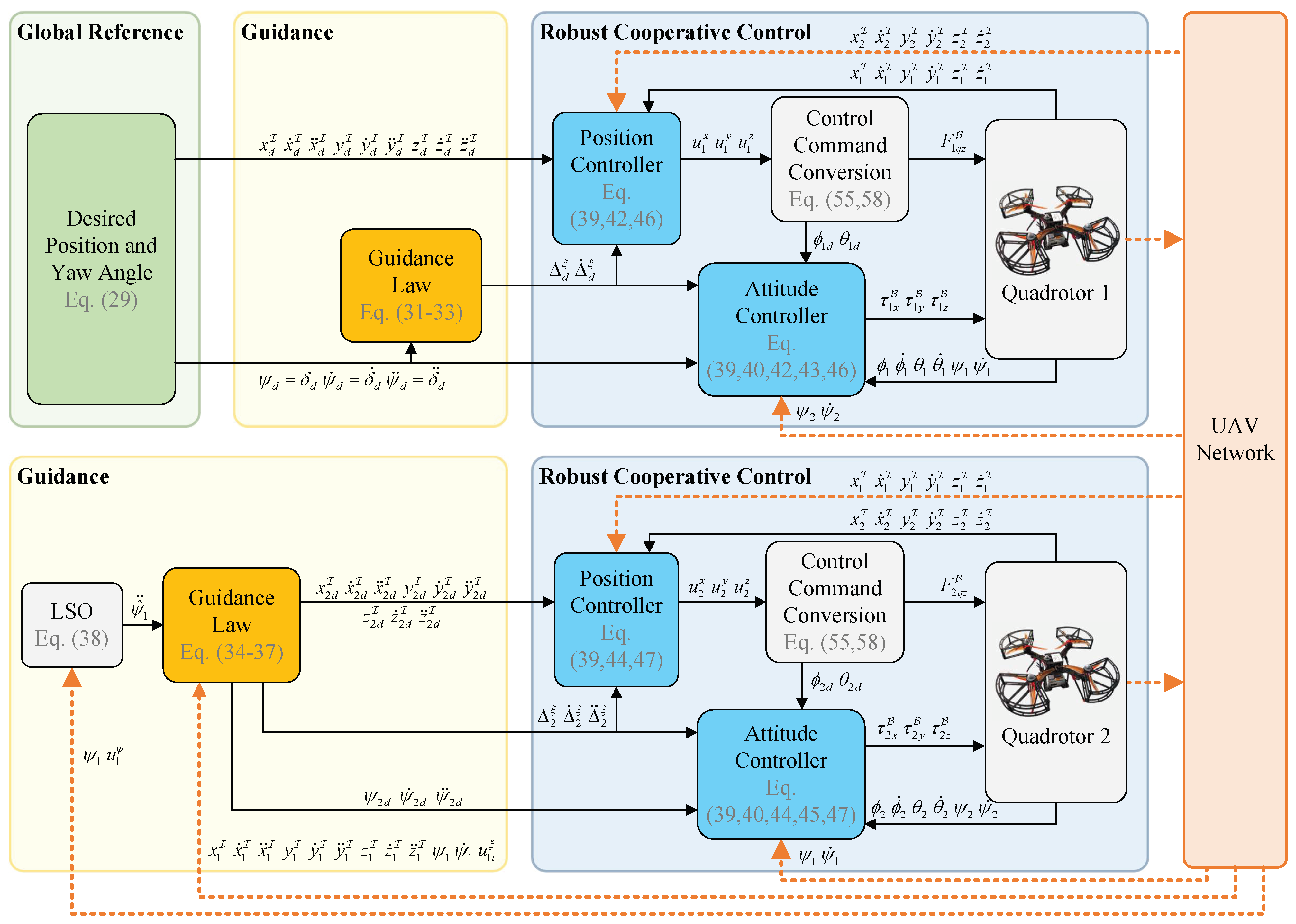
3. Guidance and Robust Control Design
3.1. Design of the Guidance Law
3.2. Design of the Robust Controller
3.3. Design of UDE
3.4. Control Command Conversion
3.5. Stability and Performance Analysis
- Stability Condition 1. For the channels, , , , and . For the channels, , and .
- (i)
- All the states of the two quadrotors are bounded by applying the proposed guidance law and UDE-based robust controllers to the six channels;
- (ii)
- The trajectory tracking errors of the quadrotor formation, as well as the low-level attitude angle tracking errors, can be quantitatively regulated and satisfy
4. Simulation
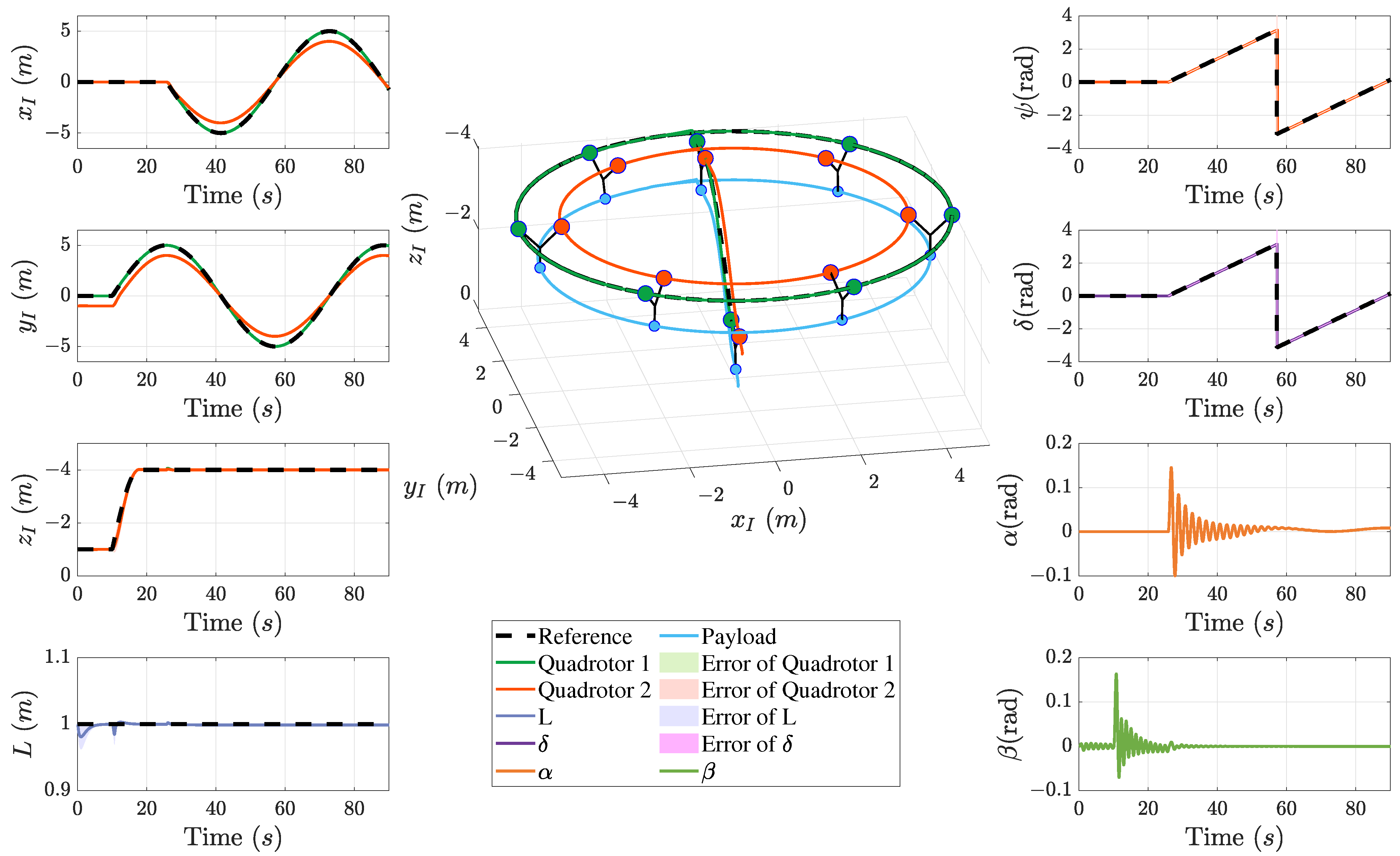
4.1. Scenario 1
4.2. Scenario 2
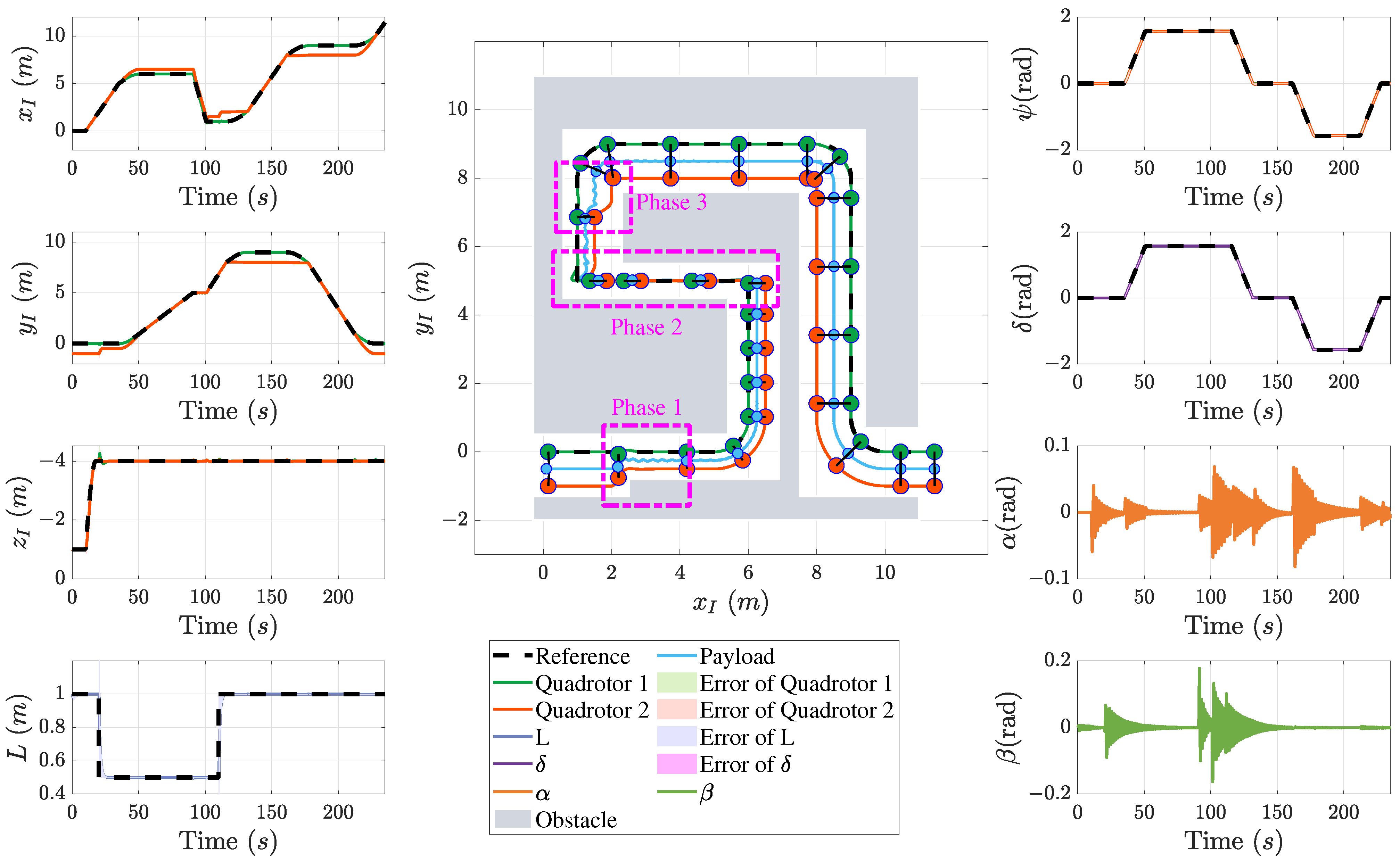
4.3. Scenario 3
4.4. Scenario 4
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UDE | uncertainty and disturbance estimator |
| LSO | Luenberger state observer |
Appendix A. Proof of Theorem 1
References
- Liang, X.; Fang, Y.C.; Sun, N.; Lin, H. Nonlinear Hierarchical Control for Unmanned Quadrotor Transportation Systems. IEEE Trans. Ind. Electron. 2017, 65, 3395–3405. [Google Scholar] [CrossRef]
- Qian, L.H.; Graham, S.; Liu, H.H.T. Guidance and Control Law Design for a Slung Payload in Autonomous Landing: A Drone Delivery Case Study. IEEE ASME Trans. Mechatronics 2020, 25, 1773–1782. [Google Scholar] [CrossRef]
- Yang, S.; Xian, B. Energy-based Nonlinear Adaptive Control Design for the Quadrotor UAV System with a Suspended Payload. IEEE Trans. Ind. Electron. 2019, 67, 2054–2064. [Google Scholar] [CrossRef]
- Gimenez, J.; Gandolfo, D.C.; Salinas, L.R.; Rosales, C.; Carelli, R. Multi-objective Control for Cooperative Payload Transport with Rotorcraft UAVs. ISA Trans. 2018, 80, 491–502. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Zhang, Z.; Yu, H.; Wang, Y.; Fang, Y.C.; Han, J.D. Antiswing Control for Aerial Transportation of the Suspended Cargo by Dual Quadrotor UAVs. IEEE/ASME Trans. Mechatronics 2022, 27, 5159–5172. [Google Scholar] [CrossRef]
- Alothman, Y.; Guo, M.H.; Gu, D.B. Using Iterative LQR to Control Two Quadrotors Transporting a Cable-suspended Load. IFAC-PapersOnLine 2017, 50, 4324–4329. [Google Scholar] [CrossRef]
- Villa, D.K.D.; Brandão, A.S.; Carelli, R.; Sarcinelli-Filho, M. Cooperative Load Transportation With Two Quadrotors Using Adaptive Control. IEEE Access 2021, 9, 129148–129160. [Google Scholar] [CrossRef]
- Pereira, P.O.; Dimarogonas, D.V. Nonlinear Pose Tracking Controller for Bar Tethered to Two Aerial Vehicles with Bounded Linear and Angular Accelerations. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 4260–4265. [Google Scholar]
- Prajapati, P.; Parekh, S.; Vashista, V. Collaborative Transportation of Cable-Suspended Payload using Two Quadcopters with Human in the loop. In Proceedings of the 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019; pp. 1–6. [Google Scholar]
- Ccari, L.F.C.; Yanyachi, P.R. A Novel Neural Network-Based Robust Adaptive Formation Control for Cooperative Transport of a Payload Using Two Underactuated Quadcopters. IEEE Access 2023, 11, 36015–36028. [Google Scholar] [CrossRef]
- Aliyu, A.; El Ferik, S. Control of Multiple-UAV Conveying Slung Load With Obstacle Avoidance. IEEE Access 2022, 10, 62247–62257. [Google Scholar] [CrossRef]
- Chen, T.; Shan, J.J. Cooperative Transportation of Cable-suspended Slender Payload Using Two Quadrotors. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–19 October 2019; pp. 432–437. [Google Scholar]
- Tang, S.; Sreenath, K.; Kumar, V. Aggressive Maneuvering of a Quadrotor with a Cable-Suspended Payload. In Proceedings of the Robotics: Science and Systems, Workshop on Women in Robotics, Berkeley, CA, USA, 12–16 July 2014; pp. 1–20. [Google Scholar]
- Chai, Y.; Liang, X.; Yang, Z.C.; Han, J.D. Energy-based Nonlinear Adaptive Control for Collaborative Transportation Systems. Aerosp. Sci. Technol. 2022, 126, 107510. [Google Scholar] [CrossRef]
- Lin, D.S.; Han, J.D.; Li, K.; Zhang, J.L.; Zhang, C.Y. Payload Transporting with Two Quadrotors by Centralized Reinforcement Learning Method. IEEE Trans. Aerosp. Electron. Syst. 2023, 60, 239–251. [Google Scholar] [CrossRef]
- Lu, Q.; Ren, B.B.; Parameswaran, S. Uncertainty and Disturbance Estimator-Based Global Trajectory Tracking Control for a Quadrotor. IEEE/ASME Trans. Mechatronics 2020, 25, 1519–1530. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Rees, D. Control of Uncertain LTI Systems Based on an Uncertainty and Disturbance Estimator. J. Dyn. Sys. Meas. Control 2004, 126, 905–910. [Google Scholar] [CrossRef]
- Khalil, H.K.; Grizzle, J.W. Nonlinear Systems, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002; pp. 176–177. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Variable Description |
|---|---|
| Position of the i-th quadrotor | |
| Position of the payload | |
| Rotation angles of the i-th quadrotor | |
| Linear velocity of the i-th quadrotor | |
| Linear velocity of the payload | |
| Angular velocity of the i-th quadrotor | |
| Rotor rotation speeds of the i-th quadrotor | |
| Sum of the rotor rotation speeds of the i-th quadrotor | |
| Thrust command for the i-th quadrotor | |
| Torque command for the i-th quadrotor | |
| Air drag on the i-th quadrotor | |
| Air drag on the payload | |
| Cable pulling force on the payload | |
| Cable pulling force on the i-th quadrotor | |
| Total disturbance force on the i-th quadrotor | |
| , | Payload swing angles |
| Quadrotor formation yaw angle | |
| The angle between the cables that connect the quadrotors | |
| L | Formation size: the distance between the two quadrotors |
| Payload acceleration induced by the rotation of | |
| Payload acceleration induced by the rotation of | |
| Payload acceleration induced by the rotation of | |
| Acceleration of the midpoint of the two quadrotors | |
| Acceleration of the i-th quadrotor |
| Symbols | Parameter Description | Nominal Values |
|---|---|---|
| Quadrotor mass | 1 kg | |
| Payload mass | 0.05 kg | |
| l | Length of the cable that connects the knot and payload | 0.5 m |
| Length of the cables that connects the knot and quadrotor | 0.707 m | |
| Quadrotor moment of inertia | 0.01 kg·m2 | |
| Rotor moment of inertia | 3.789 × 10−6 kg·m2 | |
| K | Air drag coefficient | 0.04 kg/m |
| g | Gravitational acceleration | 9.8 m/s2 |
| Control Channels | Control Gains | |||||||
|---|---|---|---|---|---|---|---|---|
| x | 3 | 2 | 5 | 5 | 1 | 1 | \ | \ |
| y | 3 | 2 | 5 | 5 | 1 | 1 | \ | \ |
| z | 1 | 5 | 5 | 1 | \ | \ | ||
| 20 | 20 | \ | \ | 1 | \ | \ | ||
| 3 | 2 | 5 | 5 | 1 | 1 | 100 | 100 | |
| Scenario Number | Scenario Description |
|---|---|
| 1 | Take-off and level flight with varying formation size |
| 2 | Coordinated turn in a circular flight |
| 3 | Obstacle avoidance via time-varying formation flight |
| 4 | Robustness verification during hovering |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, E.; Sun, J.; Liang, Y.; Zhou, B.; Jiang, F.; Zhu, Y. Modeling, Guidance, and Robust Cooperative Control of Two Quadrotors Carrying a “Y”-Shaped-Cable-Suspended Payload. Drones 2024, 8, 103. https://doi.org/10.3390/drones8030103
Wang E, Sun J, Liang Y, Zhou B, Jiang F, Zhu Y. Modeling, Guidance, and Robust Cooperative Control of Two Quadrotors Carrying a “Y”-Shaped-Cable-Suspended Payload. Drones. 2024; 8(3):103. https://doi.org/10.3390/drones8030103
Chicago/Turabian StyleWang, Erquan, Jinyang Sun, Yuanyuan Liang, Boyu Zhou, Fangfei Jiang, and Yang Zhu. 2024. "Modeling, Guidance, and Robust Cooperative Control of Two Quadrotors Carrying a “Y”-Shaped-Cable-Suspended Payload" Drones 8, no. 3: 103. https://doi.org/10.3390/drones8030103
APA StyleWang, E., Sun, J., Liang, Y., Zhou, B., Jiang, F., & Zhu, Y. (2024). Modeling, Guidance, and Robust Cooperative Control of Two Quadrotors Carrying a “Y”-Shaped-Cable-Suspended Payload. Drones, 8(3), 103. https://doi.org/10.3390/drones8030103