


Hybrid Encryption for Securing and Tracking Goods Delivery by Multipurpose Unmanned Aerial Vehicles in Rural Areas Using Cipher Block Chaining and Physical Layer Security


Abstract
:1. Introduction
- Proposing a novel framework for encrypting the transaction logs when using UAVs for autonomous delivery with multiple stops at various destinations;
- Describing how cipher block chaining, physical layer security, and symmetric and asymmetric encryption techniques work in tandem with the proposed approach to track goods delivery and secure the transaction logs;
- Showing that the proposed framework is feasible and securely encrypts the data in the absence of connectivity until the drone returns safely to base;
- Analyzing the proposed approach and showing its robustness to attacks;
- Discussing the suitability of the proposed approach in the face of malicious attempts to tamper with the UAV or its payload; and
- Demonstrating that the proposed approach can work with existing encryption techniques to achieve the desired objectives.
2. System Model
2.1. RFID Tracking of Goods Delivery
2.2. Hybrid Encryption Approach with CBC
3. Proposed Approach
- -
- Use a different key for encrypting each transaction data, i.e., generate a key Ki for transaction number i;
- -
- Generate this key on the spot, using physical layer security (PLS) techniques;
- -
- After symmetric key encryption using CBC, use asymmetric encryption to encrypt the key only, with the public key of the Control Center Kpublic; and
- -
- Store the symmetric key Ki encrypted with Kpublic as , but never the unencrypted key Ki as it is.
4. Results
- -
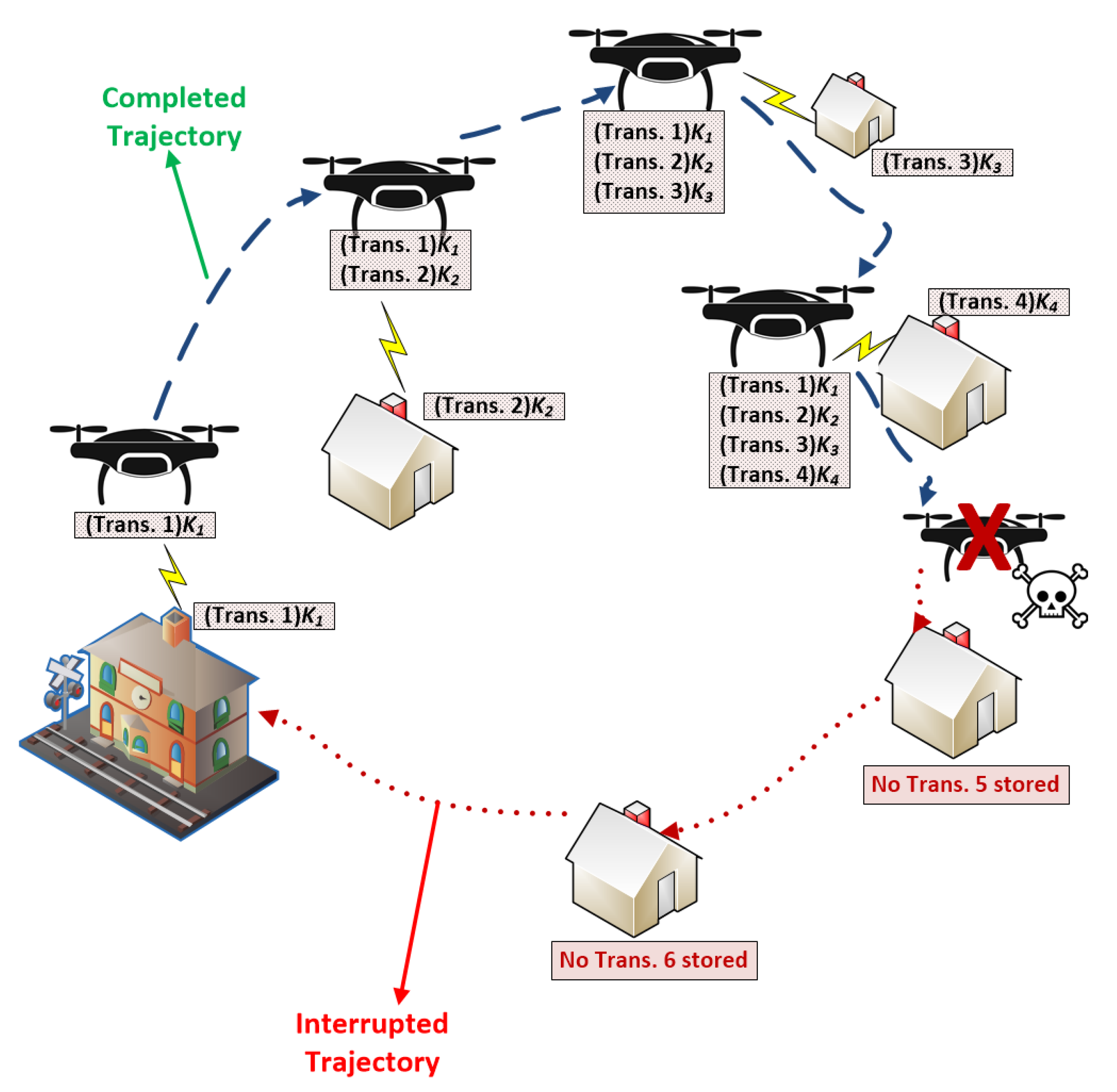
- The UAV that performed the delivery (let us denote it by UAV j) does not store the encrypted transaction (although it performs the encryption process). It stores only the symmetric keys, encrypted with the Control Center’s public key. It needs only to store the encrypted version of the last transaction to use it with the next XOR operation, and then it can discard it. For example, it stores encrypted transaction i to use it for encrypting transaction (i + 1), then discards it, keeping encrypted transaction (i + 1) only to use it for encrypting transaction (i + 2), and so on.
- -
- However, the encrypted block of each transaction is stored at that transaction’s location (the actual location where the delivery happened, e.g., BS, AP, or CPE at a house, etc.), to be “picked up” later.
- -
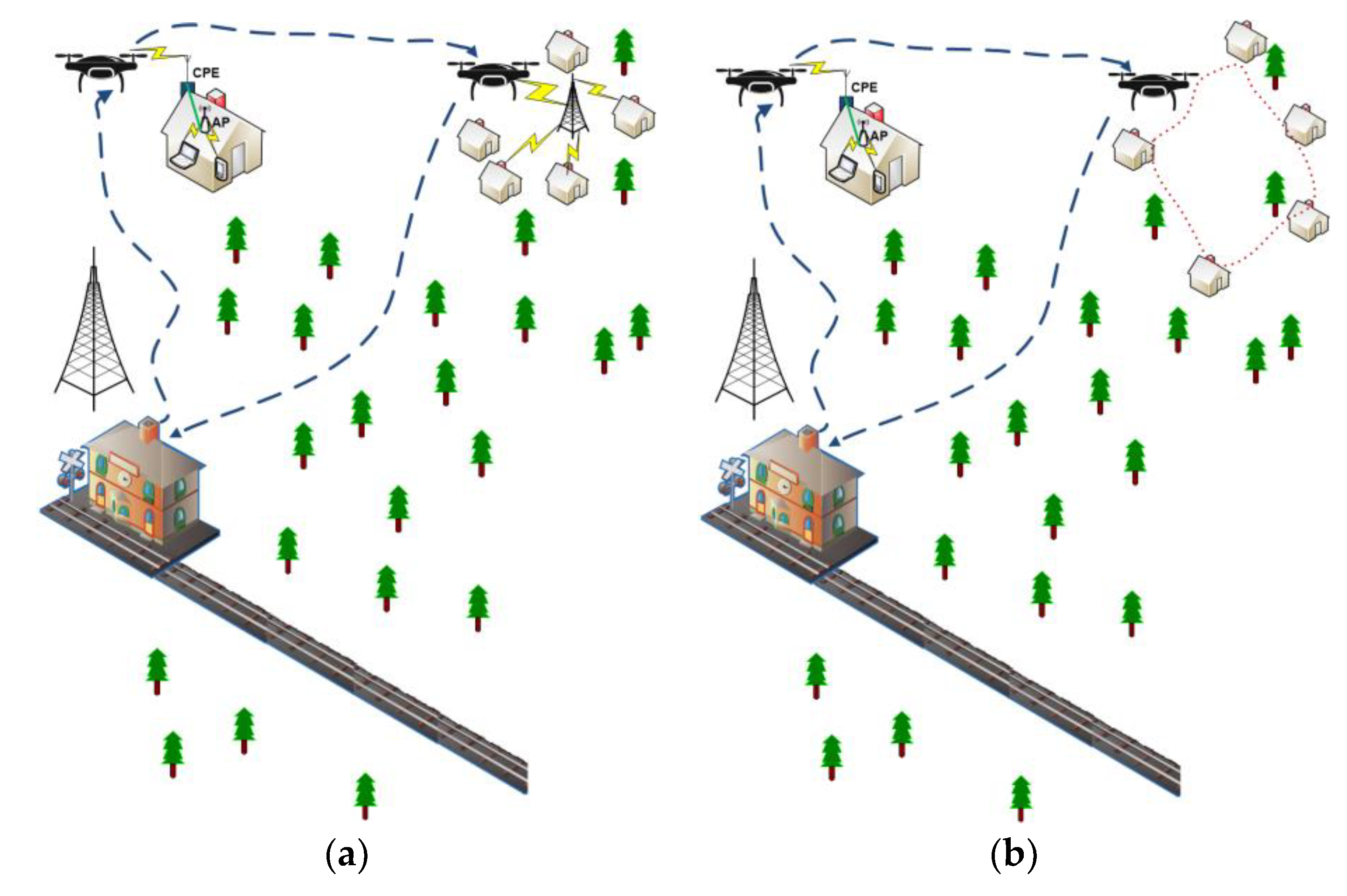
- The next UAV (j + 1) that will be hovering over the area provides DTN connectivity and collects the odd-numbered transactions of UAV j.
- -
- The one after it, UAV (j + 2), provides DTN connectivity and collects the even-numbered transactions of UAV j.
- -
- It should be noted that each of UAVs (j + 1) and (j + 2) could also perform delivery operations, encrypt the corresponding transactions, and store them at the corresponding locations to be picked up by subsequent UAVs, similar to what they did for UAV j.
- -
- Thus, in fact, UAV (j + 2) would be collecting the even-numbered transactions of UAV j and the odd-numbered transactions of UAV (j + 1).
5. Discussion
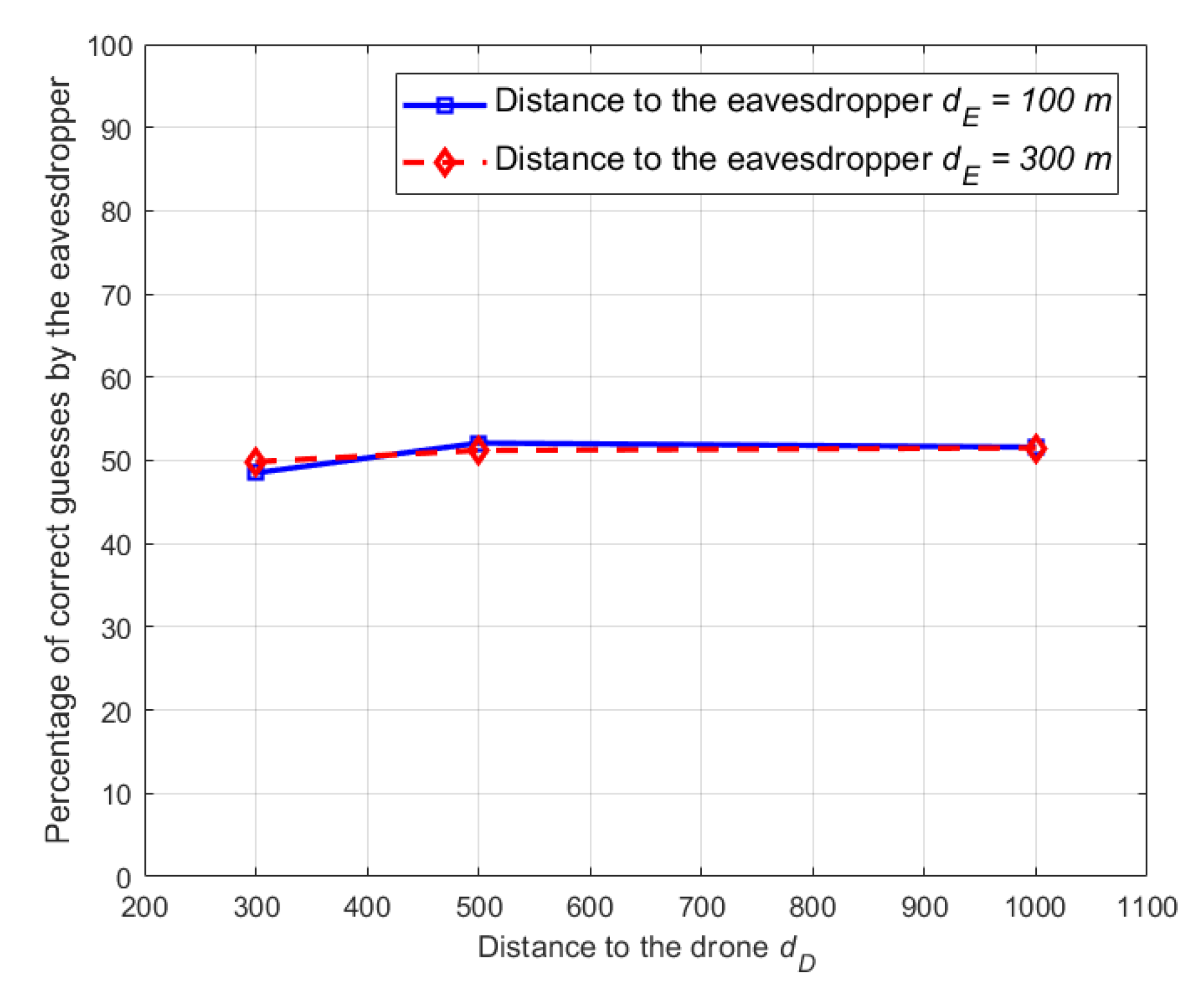
5.1. Physical Layer Security (PLS) Key Generation
5.2. Data Confidentiality
5.3. Resilience to Tampering and Physical Attacks
5.4. Interplay between the Various Techniques Used in the Proposed Approach
- DTN is a precondition for the proposed approach to be applicable: If internet connectivity is available, then the drone can communicate directly with the Control Center, encrypt the transaction using any traditional technique, and send it immediately (in encrypted form) to the center without any need for storing it on the drone or having to carry this information through multiple destination/stops. The proposed approach is unnecessary in the presence of connectivity.
- Asymmetric cryptography (e.g., RSA) is needed to encrypt the keys so that they can be securely carried by the drone until its return to the Control Center. Since the private key is only stored at this Control Center, then an attacker accessing the memory location of the encrypted keys on the drone will not be able to decrypt them.
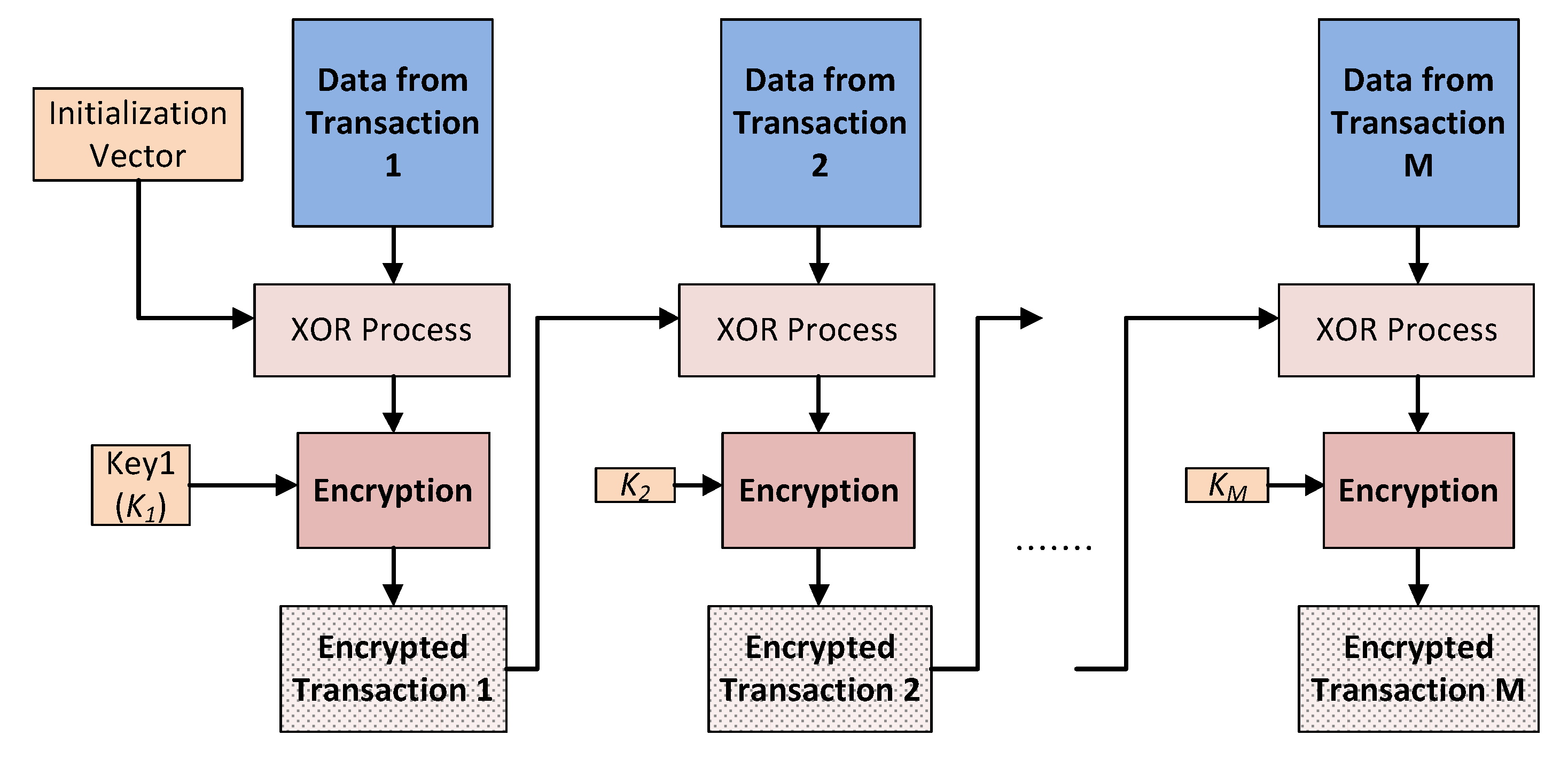
- Symmetric encryption following the diagram of Figure 3 is used with different keys, although traditional CBC might use the same key. This is necessary for the scenario considered in this paper, where the drone must make multiple stops at different destinations. In fact, if the same key is used, once the drone lands at a given destination, the data of the previous destinations can be recovered and decoded, which violates the confidentiality of the data and the privacy of the previous users. Using a different key per destination, such that this key is unknown to the other destinations, provides protection against such a scenario.
- In the proposed approach, each one of these keys is used once, immediately after being generated, then stored after being encrypted using the Control Center’s public key. Thus, after using a key Ki for one of the blocks shown in Figure 3, the drone itself cannot recover its value after storing it in encrypted form (decryption can be performed only with the private key of the Control Center). To be able to use these symmetric keys without carrying them in an accessible form, the framework proposed in this paper suggests generating them using physical layer security. In this case, the key for a given transaction can be generated immediately at the corresponding location, used for encrypting the corresponding information block, and then stored securely in the drone without having to be exchanged/transmitted over the wireless channel.
- The use of CBC adds an extra layer of security to this symmetric encryption approach. This is achieved by linking the transactions at the multiple stops of the drone in a blockchain-like approach, showing the order of delivery along the followed trajectory, not just the separate encoding of the data as standalone delivery operations. Furthermore, it is necessary in case the modified version of the proposed approach, discussed in Section 4 while analyzing Equations (1) and (2), is adopted.
5.5. Summary
- First, the trajectory of the UAV is planned at the Control Center. It can be programmed on the UAV, the goods can be loaded, and the drone can be sent on its way.
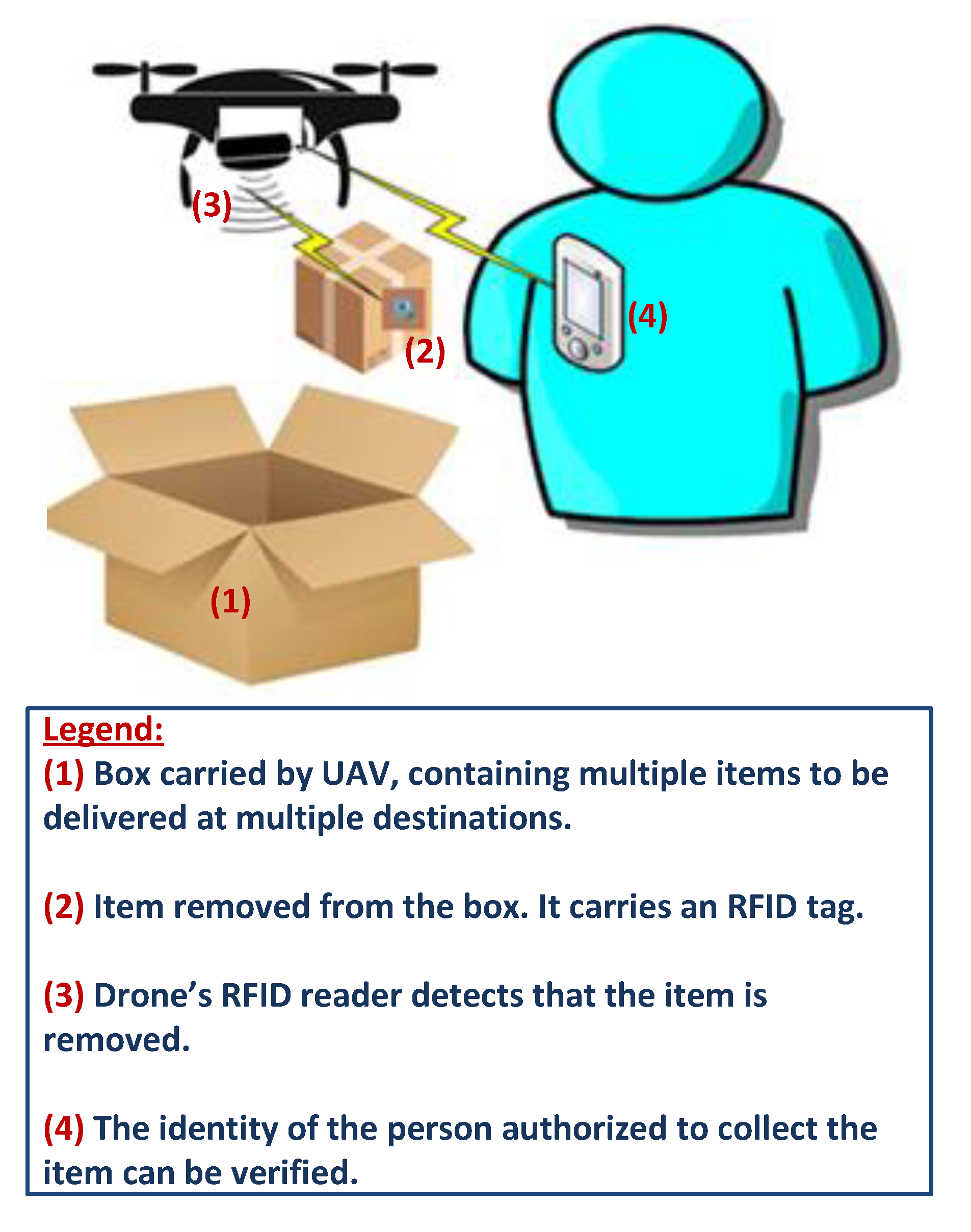
- At each location, the recipients of the carried goods can identify themselves through an app or code, then get the item dedicated to them. The removal of the item at the given location is detected using, for example, the approach summarized in Figure 2, which is described in more detail in [23]. A notification is sent to the user in case the wrong item is removed, and they are informed to take only the item(s) dedicated to them.
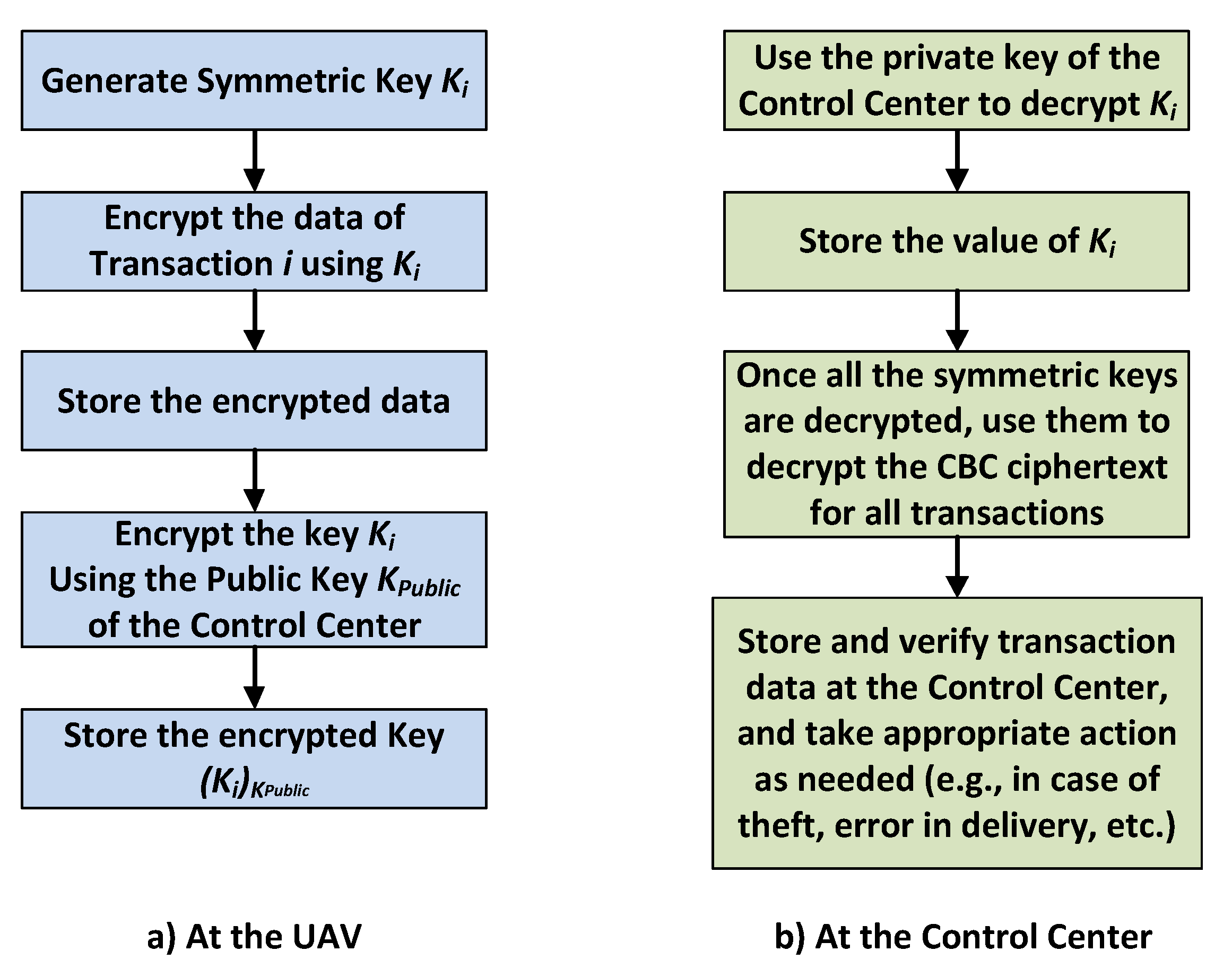
- The outcome of this transaction (whether success, taking a wrong item, or failing to find the recipient after a certain time), is encrypted using the approach proposed in this paper and summarized in Figure 3: (i) a symmetric encryption key is generated using physical layer security techniques, (ii) this key is used to encrypt the current transaction using a symmetric encryption algorithm, such as AES, after XOR-ing it with the output of the previous transaction (the very first block is encrypted at the Command Center, indicating, for example, the trip number, date and time, planned trajectory, etc.), and (iii) the key is safely stored after encrypting it with the Control Center’s public key, using an asymmetric algorithm such as RSA.
- The drone then moves on its way to the other target destinations, repeating the above two steps (delivery and encryption) at each stop, until returning to base.
- After the drone’s return, the Control Center’s private key is used to decrypt the symmetric encryption keys. Then, each key is used to decrypt the corresponding transaction in the chain. The data can then be analyzed, processed, and stored. Appropriate action can be taken as needed: Correct deliveries could be marked as such. If payment is required, it can be made by charging, for example, a corresponding credit card number of the customer, stored safely at the Control Center. Incorrect deliveries can be detected and identified. Suitable measures can be taken (e.g., legal action).
6. Conclusions and Future Research Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| %--------------------------------------------- % README %--------------------------------------------- % This is file “Test.m” used to test the proposed approach. % The proposed approach is a framework that does not depend on a specific algorithm. It is a suggested approach for protecting transaction data logs in autonomous multiple delivery scenarios in the absence of connectivity. % The proposed approach can be used with any symmetric encryption algorithm in the indicated encryption blocks: DES, 3DES, AES, AES-GCM, etc. It can also be used with any asymmetric encryption approach to encrypt the keys Ki and store them in the drone’s memory. % Moreover, the proposed approach complements and does not compete with other methods, for example, AES. % AES itself can (and generally does) use CBC in its internal operation to encrypt data (inside each one of the “Encryption” rectangles shown in Figure 3). % Beyond this “internal” CBC inside a given “Encryption” block, what is proposed in the paper is to link the ciphertexts of each transaction via an “external” CBC in a blockchain-like fashion. % To show how the proposed method complements, instead of competing with, other encryption techniques, we implement the proposed “external” CBC approach in conjunction with AES-256 using CBC internally (from [29]) in each “Encryption” block of Figure 3: % % To run this file: % 1) Download the AES-256 Encryption code from: % [29] David Hill (2024). AES-256 GUI using CBC mode % (https://www.mathworks.com/matlabcentral/fileexchange/73427-aes-256-gui-using-cbc-mode) (accessed on 14 March 2024), % MATLAB Central File Exchange. % 2) Extract the code of the zip file from [29] into a single folder % 3) Copy this Test file to the same folder % 4) Save the functions rsa_keys, rsa_enc, and rsa_dec found below in the same folder % 5) Run the file “Test.m” %--------------------------------------------- % Examples of potential transaction texts, to be encrypted with the % proposed approach message(1,:) = ‘Departing from Base Command Center 123. Date 22 February 2024; Time 8:12 AM; Nb of Locations: 4; Nb of Items to deliver: 4’; message(2,:) = ‘This is the transaction at Location 1. Date 22 February 2024; Time 8:47 AM; Item: COVID Vaccine Pack; Delivery: Successful’; message(3,:) = ‘This is the transaction at Location 2. Date 22 February 2024; Time 9:20 AM; Item: Antibiotic; Delivery: Successful’; message(4,:) = ‘This is the transaction at Location 3. Date 22 February 2024; Time 9:56 AM; Item: Polio Vaccine; Delivery: Successful’; message(5,:) = ‘This is the transaction at Location 4. Date 22 February 2024; Time 10:35 AM; Item: Flu Medicine; Delivery: Successful’; % Examples of encryption keys (in hexadecimal), to be used for encrypting % the above messages key(1,:) = ‘ABCDEFFEDCBA12345678900987654321ABCDEFFEDCBA12345678900987654321’; key(2,:) = ‘12345678900987654321ABCDEFFEDCBA12345678900987654321ABCDEFFEDCBA’; key(3,:) = ‘AAAAA678900987654321ABCDEFFEDCBA12345678900987654321ABCDEFFEDCBA’; key(4,:) = ‘ABCDEFFEDCBA12345678900987654321ABCDEFFEDCBA12345678900987CDECDE’; key(5,:) = ‘012DEFFEDCBA12345678900987654321ABCDEFFEDCBA12345678900987654FFF’; % Encrypt the first message with the first key while calculating the CPU time needed: t = cputime; em(1,:) = Crypt(message(1,:), key(1,:)); te(1) = cputime -t; % calculate the CPU time needed % Encrypt the rest of the messages using the proposed CBC approach: each plaintext message is % XORed with the ciphertext of the previous message, before encrypting the result for i=2:size(message,1) t = cputime; lm = length(message(i,:));xm = bitxor(typecast(uint8(message(i,:)),’int8’), typecast(uint8(em(i-1,1:lm)),’int8’)); em(i,:) = Crypt(char(xm), key(i,:)); te(i) = cputime -t; end %---------------RSA Encryption and Decryption of the keys---------------- % The authors wrote the functions rsa_keys, rsa_enc, and rsa_dec after % adapting/modifying the file rsa_code.m found at: % suriyanath (2024). RSA algorithm (https://www.mathworks.com/matlabcentral/fileexchange/46824-rsa-algorithm), MATLAB Central File Exchange. Retrieved 26 February 2024. p = 13; q = 113; % select two prime numbers [e, d, n]= rsa_keys(p, q); % generate public and private keys % Encrypt the symmetric encryption keys using RSA (with the Center’s public % key (e,n)): for i=1:size(key,1) ek(i,:)= rsa_enc(key(i,:), e, n); end % After the drone returns to the Control Center: % Decrypt the symmetric encryption keys using RSA (with the Center’s % private key (d,n)): for i=1:size(ek,1) dk(i,:)= rsa_dec(ek(i,:), d, n); end %----------------------------------------------------------------------- % Decrypt the messages using CBC: each decrypted message is % XORed with the ciphertext of the previous message, before obtaining % the actual result (which would correspond to the initial message): for i=size(em,1):-1:2 t = cputime; dm(i,:) = Decrypt(dk(i,:),em(i,:)); lm = length(message(i,:)); xm = bitxor(typecast(uint8(dm(i,:)),’int8’), typecast(uint8(em(i-1,1:lm)),’int8’)); dm(i,:) = char(xm); td(i) = cputime -t; end % decrypt the last message with the last key while calculating the CPU % time needed: t = cputime; dm(1,:) = Decrypt(dk(1,:),em(1,:)); td(1) = cputime -t; % Display the results: fprintf(‘The initial messages to be encrypted are:\n’); message fprintf(‘\n\n’); fprintf(‘The encrypted messages are:\n’); em fprintf(‘\n\n’); fprintf(‘The decrypted messages are:\n’); dm fprintf(‘\n\n’); fprintf(‘Average CPU time for Encryption:’); sum(te)/length(te) fprintf(‘\n’); fprintf(‘Average CPU time for Decryption:’); sum(td)/length(td) fprintf(‘\n’); function [e, d, n]= rsa_keys(p, q) % This function takes two prime numbers as input and produces two keys as % output: % Public key: e,n % Private key: d, n % e.g.,: % p= 13; % q= 113; % n=1469 % phi(1469) is 1344 % d=367 % Public key is (271,1469) % Private key is (367,1469) n=p*q; phi=(p-1)*(q-1); val=0; cd=0; while(cd~=1||val==0) n1=randi(n,1,1); e=randi([2 n1],1,1); val=isprime(e); cd=gcd(e,phi); end val1=0; d=0; while(val1~=1); d=d+1; val1=mod(d*e,phi); end function [c1]= rsa_enc(m, e, n) % This function takes a message m and a public key (e,n) as input and % generates the RSA encrypted ciphertext c1 as output m1=m-0; over=length(m1); o=1; while(o<=over) m=m1(o); diff=0; if(m>n) diff=m-n+1; end m=m-diff; qm=dec2bin(e); len=length(qm); c=1; xz=1; while(xz<=len) if(qm(xz)==‘1’) c=mod(mod((c^2),n)*m,n); elseif(qm(xz)==‘0’) c=(mod(c^2,n)); end xz=xz+1; end c1(o)=c; o=o+1; end function [nm1]= rsa_dec(c1, d, n) % This function takes an RSA encrypted message c1 and a private key (e,n) % as input and generates the decrypted message nm1 as output over=length(c1); o=1; while(o<=over) c=c1(o); diff=0; if(c>n) diff=c-n+1; end c=c-diff; qm1=dec2bin(d); len1=length(qm1); nm=1; xy=1; while(xy<=len1) if(qm1(xy)==‘1’) nm=mod(mod((nm^2),n)*c,n); elseif(qm1(xy)==‘0’) nm=(mod(nm^2,n)); end xy=xy+1; end nm=nm+diff; nm1(o)=char(nm); o=o+1; end |
| >> clear all; Test The initial messages to be encrypted are: message = 5×117 char array ‘Departing from Base Command Center 123. Date 22 February 2024; Time 8:12 AM; Nb of Locations: 4; Nb of Items to deliver: 4’ ‘This is the transaction at Location 1. Date 22 February 2024; Time 8:47 AM; Item: COVID Vaccine Pack; Delivery: Successful’ ‘This is the transaction at Location 2. Date 22 February 2024; Time 9:20 AM; Item: Antibiotic; Delivery: Successful’‘This is the transaction at Location 3. Date 22 February 2024; Time 9:56 AM; Item: Polio Vaccine; Delivery: Successful’ ‘This is the transaction at Location 4. Date 22 February 2024; Time 10:35 AM; Item: Flu Medicine; Delivery: Successful’ The encrypted messages are: em = 5×234 char array ‘1b81f0e814482ffb0b9196187fadd43a1b2bd0d859c4b529f14efd8dafbb6bd5d06ed35899e561bdfcd90f4bac411d9b48a423d885ec8426dd4a507da03755ccb5ecc552de2cd83ea20d27648350308ac425bc664a5975fc337dfda3a565b329c9dc8372ea2a647b9e667afbb80c06a9bf90a166f5’ ‘b5cd8cc8c460e1dc35d086f12340c89bc5623fee151652836e2579c19a7b765593ceadbd6763a83e83c3703468d19688570f632a2d2eff35b6192c3e82b3d65fe0233b1ea17ee556178ad7471ff148799c53af88a2610754c231d29a78571a5878d29e2a9751cb3987f16532e6b9bbcab175344aa3’ ‘159075f08fc1ecfe70dfa03fa5475cb696d3285aaf2172001bd9a995a0b9042124597bb504cb8315c399860d3e3dd373338703c116387c397f9aff9997457e596080db66d2e1ea94a3b56f66e5d954d52ed3d458488b272c97a8e5480cef4b2fa4a97e2decf14511894376f830d145dbae98c25a91’ ‘99bcb582f35abba2b8e0b66143a9be29d70c68e82c1061a945b118b0f762b7670d8338bab3534619df494450ba414020d779462f54c3a0da37fa03dc9f9b8904b29e1b90324bdf008ad9329c9dac14f1cba418f8267c0163aa6b00fd19912b7c8208d1ef7b50f70a7b7d5b07f2ab9e949ee3386a2e’ ‘073b99983997356f6849dc02095627d7cca42e1f169eea7971ac6942613bb64788ddfb8f7368253bc043b4969f481bffdf28eeb182b02e63208eb8ceba9bb523abb33bc510aee576114a4965c8ab319bc30a8f2826f7e8fb865e93f22f5e503f274182ddaea77e084211589b093ba200489c5cbccd’ The decrypted messages are: dm = 5×117 char array ‘Departing from Base Command Center 123. Date 22 February 2024; Time 8:12 AM; Nb of Locations: 4; Nb of Items to deliver: 4’ ‘This is the transaction at Location 1. Date 22 February 2024; Time 8:47 AM; Item: COVID Vaccine Pack; Delivery: Successful’ ‘This is the transaction at Location 2. Date 22 February 2024; Time 9:20 AM; Item: Antibiotic; Delivery: Successful’‘This is the transaction at Location 3. Date 22 February 2024; Time 9:56 AM; Item: Polio Vaccine; Delivery: Successful’ ‘This is the transaction at Location 4. Date 22 February 2024; Time 10:35 AM; Item: Flu Medicine; Delivery: Successful’ Average CPU time for Encryption: ans = 0.0437 Average CPU time for Decryption: ans = 0.0656 |
References
- Asghar, M.Z.; Memon, S.A.; Hämäläinen, J. Evolution of Wireless Communication to 6G: Potential Applications and Research Directions. Sustainability 2022, 14, 6356. [Google Scholar] [CrossRef]
- Onireti, O.; Imran, M.A.; Qadir, J.; Sathiaseelan, A. Will 5G See Its Blind Side? Evolving 5G for Universal Internet Access. In Proceedings of the Workshop on Global Access to the Internet for All (GAIA), Florianopolis, Brazil, 22–26 August 2016; ACM: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Dangi, R.; Choudhary, G.; Dragoni, N.; Lalwani, P.; Khare, U.; Kundu, S. 6G Mobile Networks: Key Technologies, Directions, and Advances. Telecom 2023, 4, 836–876. [Google Scholar] [CrossRef]
- Suraci, C.; Pizzi, S.; Montori, F.; Di Felice, M.; Araniti, G. 6G to Take the Digital Divide by Storm: Key Technologies and Trends to Bridge the Gap. Future Internet 2022, 14, 189. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Tong, W.; Zhu, P. 6G: The Next Horizon—From Connected People and Things to Connected Intelligence, 1st ed.; Cambridge University Press: Cambridge, UK, 2021; pp. 1–462. ISBN 9781108839327. [Google Scholar]
- Yaacoub, E.; Alouini, M.-S. A Key 6G Challenge and Opportunity—Connecting the Base of the Pyramid: A Survey on Rural Connectivity. Proc. IEEE 2020, 108, 533–582. [Google Scholar] [CrossRef]
- Chiaraviglio, L.; Amorosi, L.; Blefari-Melazzi, N.; Dell’Olmo, P.; Natalino, C.; Monti, P. Optimal design of 5G networks in rural zones with UAVs, optical rings, solar panels and batteries. In Proceedings of the 20th International Conference on Transparent Optical Networks (ICTON), Bucharest, Romania, 1–5 July 2018; pp. 1–4. [Google Scholar]
- Amorosi, L.; Chiaraviglio, L.; D’Andreagiovanni, F.; Blefari-Melazzi, N. Energy-efficient mission planning of UAVs for 5G coverage in rural zones. In Proceedings of the IEEE International Conference on Environmental Engineering, Milan, Italy, 12 March 2018; pp. 1–9. [Google Scholar]
- Kusakana, K.; Vermaak, H.J. Hybrid renewable power systems for mobile telephony base stations in developing countries. Renew. Energy 2013, 51, 419–425. [Google Scholar] [CrossRef]
- Alsharif, M.H.; Kim, J. Optimal solar power system for remote telecommunication base stations: A case study based on the characteristics of South Korea’s solar radiation exposure. Sustainability 2016, 8, 942. [Google Scholar] [CrossRef]
- Kassem, M.M.; Marina, M.K.; Radunovic, B. DIY mdel for mobile network deployment: A step towards 5G for all. In Proceedings of the 1st ACM SIGCAS Conference on Computing and Sustainable Societies (COMPASS), Menlo Park and San Jose, CA, USA, 20–22 June 2018; pp. 1–5. [Google Scholar]
- Schmitt, P.; Iland, D.; Zheleva, M.; Belding, E. HybridCell: Cellular connectivity on the fringes with demand-driven local cells. In Proceedings of the 35th Annual IEEE International Conference on Computer Communications (INFOCOM), San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Soares, V.; Farahmand, F.; Rodrigues, J. A layered architecture for vehicular delay tolerant networks. In Proceedings of the IEEE Symposium on Computers and Communications, Sousse, Tunisia, 5–8 July 2009; pp. 122–127. [Google Scholar]
- Pentland, A.; Fletcher, R.; Hasson, A. DakNet: Rethinking connectivity in developing nations. IEEE Comput. 2004, 37, 78–83. [Google Scholar] [CrossRef]
- Asano, H.; Okada, H.; Naila, C.B.; Katayama, M. Flight Model Using Voronoi Tessellation for a Delay-Tolerant Wireless Relay Network Using Drones. IEEE Access 2021, 9, 13064–13075. [Google Scholar] [CrossRef]
- Iranmanesh, S.; Raad, R.; Raheel, M.S.; Tubbal, F.; Jan, T. Novel DTN Mobility-Driven Routing in Autonomous Drone Logistics Networks. IEEE Access 2020, 8, 13661–13673. [Google Scholar] [CrossRef]
- Koetsier, J. Drone Delivery Is Live Today, and It′s 90% Cheaper Than Car-Based Services. Forbes.com. 18 August 2021. Available online: https://www.forbes.com/sites/johnkoetsier/2021/08/18/drone-delivery-is-live-today-and-its-90-cheaper-than-car-based-services/ (accessed on 26 February 2024).
- Baur, S.; Hader, M. Cargo Drones: The Future of Parcel Delivery. Roland Berger. 19 February 2020. Available online: https://www.rolandberger.com/en/Insights/Publications/Cargo-drones-The-future-of-parcel-delivery.html (accessed on 26 February 2024).
- Ueland, S. 8 Commercial Drone Delivery Companies. PracticalCommerce.com. 25 January 2021. Available online: https://www.practicalecommerce.com/8-commercial-drone-delivery-companies (accessed on 26 February 2024).
- Drones, A. High Payload Drone for Delivery & Transport Heavy Lifting UAV. Available online: https://www.airbornedrones.co/delivery-and-transport/ (accessed on 26 February 2024).
- Yaacoub, E. Travel Hopping Enabled Resource Allocation (THEResA) and Delay Tolerant Networking through the Use of UAVs in Railroad Networks; Ad-Hoc Networks; Elsevier: Amsterdam, The Netherlands, 2021; Volume 122, pp. 1–10. [Google Scholar]
- Araji, C.; Aburajouh, H.; Al Hail, M.; Yaacoub, E. Secure Automated Delivery of Critical Goods with RFID-based Tracking and Authentication. In Proceedings of the 10th International Symposium on Networks, Computers and Communications (ISNCC’23), Doha, Qatar, 23–26 October 2023; pp. 1–6. [Google Scholar]
- Jeon, H.; Choi, J.; McLaughlin, S.; Ha, J. Channel Aware Encryption and Decision Fusion for Wireless Sensor Networks. IEEE Trans. Inf. Forensics Secur. 2013, 8, 619–625. [Google Scholar] [CrossRef]
- Yaacoub, E.; Chehab, A.; Al-Husseini, M.; Abualsaud, K.; Khattab, T.; Guizani, M. Joint Security and Energy Efficiency in IoT Networks Through Clustering and Bit Flipping. In Proceedings of the IEEE International Wireless Communications and Mobile Computing Conference (IWCMC 2019), Tangier, Morocco, 24–28 June 2019; pp. 1385–1390. [Google Scholar]
- Cecchinato, N.; Toma, A.; Drioli, C.; Oliva, G.; Sechi, G.; Foresti, G.L. Secure Real-Time Multimedia Data Transmission from Low-Cost UAVs with A Lightweight AES Encryption. IEEE Commun. Mag. 2023, 61, 160–165. [Google Scholar] [CrossRef]
- Su, J.; Gu, N.; Bai, Q.; Lin, C. Parallel Implementation of AES-GCM with High Throughput and Energy Efficiency. In Proceedings of the 2018 International Conference on Networking and Network Applications (NaNA), Xi′an, China, 12–15 October 2018; pp. 251–256. [Google Scholar]
- Schmitt, J.P. Cryptography Algorithm RSA—Rivest-Shamir-Adleman. wordpress.com. 17 September 2018. Available online: https://joaoschmitt.wordpress.com/2018/09/17/cryptography-algorithm-rsa (accessed on 22 February 2024).
- Hill, D. AES-256 GUI Using CBC Mode. MATLAB Central File Exchange. 2024. Available online: https://www.mathworks.com/matlabcentral/fileexchange/73427-aes-256-gui-using-cbc-mode (accessed on 22 February 2024).






| AES Encryption | XOR Operation | AES Decryption |
|---|---|---|
| 32.24 ms | 2.3 µs | 62.45 ms |
| RSA Key Generation (p = 13, q = 113) | RSA Key Generation (p = 5381, q = 9319) | RSA Encryption (p = 13, q = 113) | RSA Encryption (p = 5381, q = 9319) | RSA Decryption (p = 13, q = 113) | RSA Decryption (p = 5381, q = 9319) |
|---|---|---|---|---|---|
| 0.295 ms | 688.8 ms | 0.173 ms | 0.347 ms | 0.183 ms | 0.407 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yaacoub, E.; Abualsaud, K.; Mahmoud, M. Hybrid Encryption for Securing and Tracking Goods Delivery by Multipurpose Unmanned Aerial Vehicles in Rural Areas Using Cipher Block Chaining and Physical Layer Security. Drones 2024, 8, 111. https://doi.org/10.3390/drones8030111
Yaacoub E, Abualsaud K, Mahmoud M. Hybrid Encryption for Securing and Tracking Goods Delivery by Multipurpose Unmanned Aerial Vehicles in Rural Areas Using Cipher Block Chaining and Physical Layer Security. Drones. 2024; 8(3):111. https://doi.org/10.3390/drones8030111
Chicago/Turabian StyleYaacoub, Elias, Khalid Abualsaud, and Mohamed Mahmoud. 2024. "Hybrid Encryption for Securing and Tracking Goods Delivery by Multipurpose Unmanned Aerial Vehicles in Rural Areas Using Cipher Block Chaining and Physical Layer Security" Drones 8, no. 3: 111. https://doi.org/10.3390/drones8030111
APA StyleYaacoub, E., Abualsaud, K., & Mahmoud, M. (2024). Hybrid Encryption for Securing and Tracking Goods Delivery by Multipurpose Unmanned Aerial Vehicles in Rural Areas Using Cipher Block Chaining and Physical Layer Security. Drones, 8(3), 111. https://doi.org/10.3390/drones8030111