

Research on Service Function Chain Embedding and Migration Algorithm for UAV IoT


Abstract
:1. Introduction
1.1. Background and Research Motivation
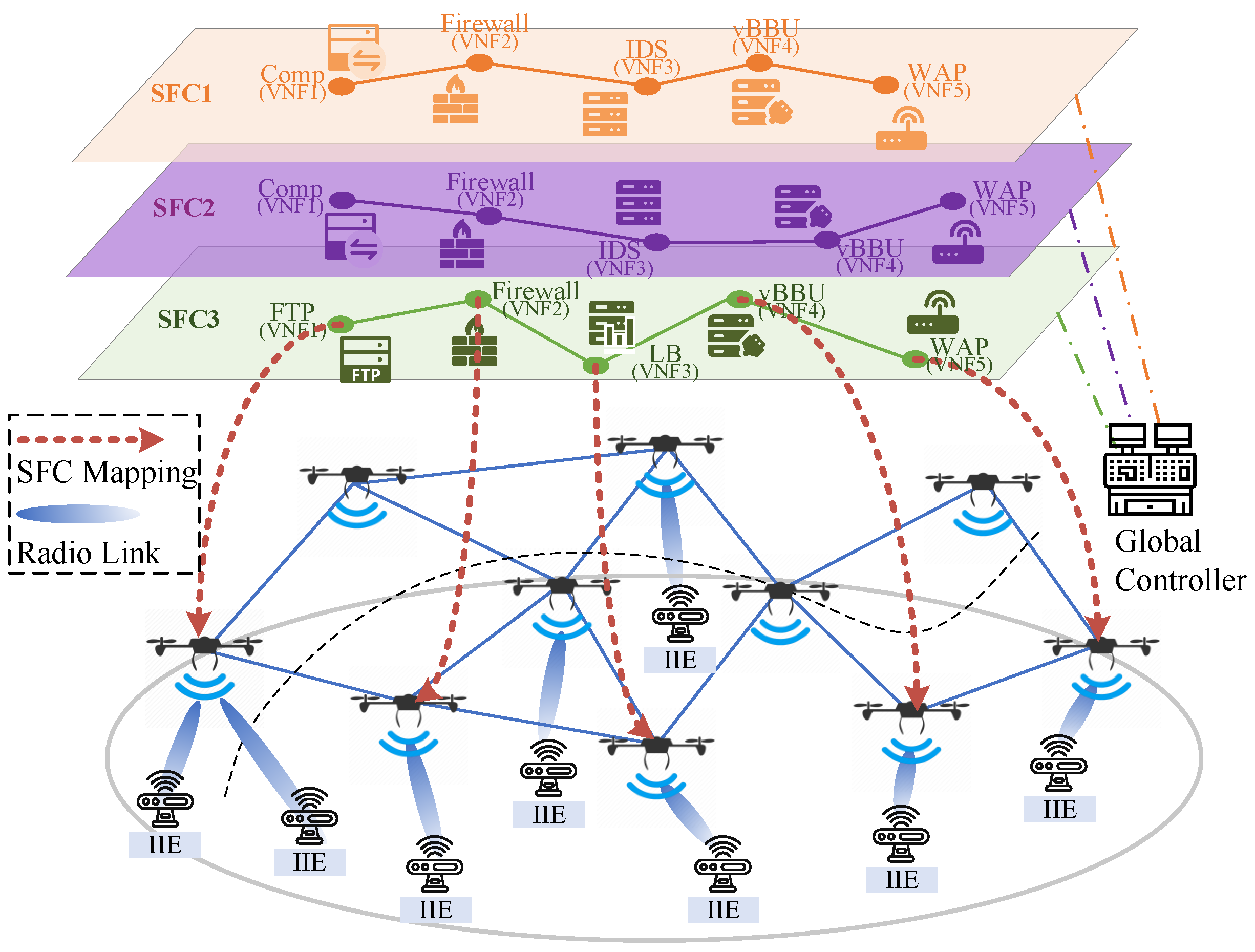
1.2. Network Architecture and Challenges
- (1)
- SFC has life cycle characteristics and requires maintenance during operation. Its life cycle includes creation, embedding, operation, migration, and destruction. Due to the dynamic characteristics of the network, such as UAV movement, network topology changes, and resource fluctuations, system performance may deteriorate or services may even be interrupted. Therefore, real-time monitoring and maintenance of the SFC are essential to guarantee the availability and reliability of the SFC.
- (2)
- Due to the particularity of UAV energy consumption, load balancing should be considered in the embedding algorithm. If the SFC embedding algorithm does not consider the energy consumption resources of UAVs, it may lead to the premature depletion of UAVs’ energy or an imbalance of energy consumption among UAVs, thus affecting the stability and sustainability of UAVs’ dynamic network.
1.3. Contributions
- Aiming to address the resource perception problem of SFC in UAV dynamic networks, a revenue calculation model based on SFC operation process monitoring is proposed. This model comprehensively considers the service quality, resource utilization, and migration cost of SFC.
- An agile algorithm for embedding and migrating SFC based on particle swarm optimization (PSO) is proposed. It can quickly find the optimal or nearly optimal embedding scheme to meet the requirements of SFC and facilitate the agile migration of SFC when the network state changes.
- A simulator and simulation environment based on MANO architecture has been developed. It is capable of simulating dynamic network topology, SFC operation processes, embedding, and migration processes.
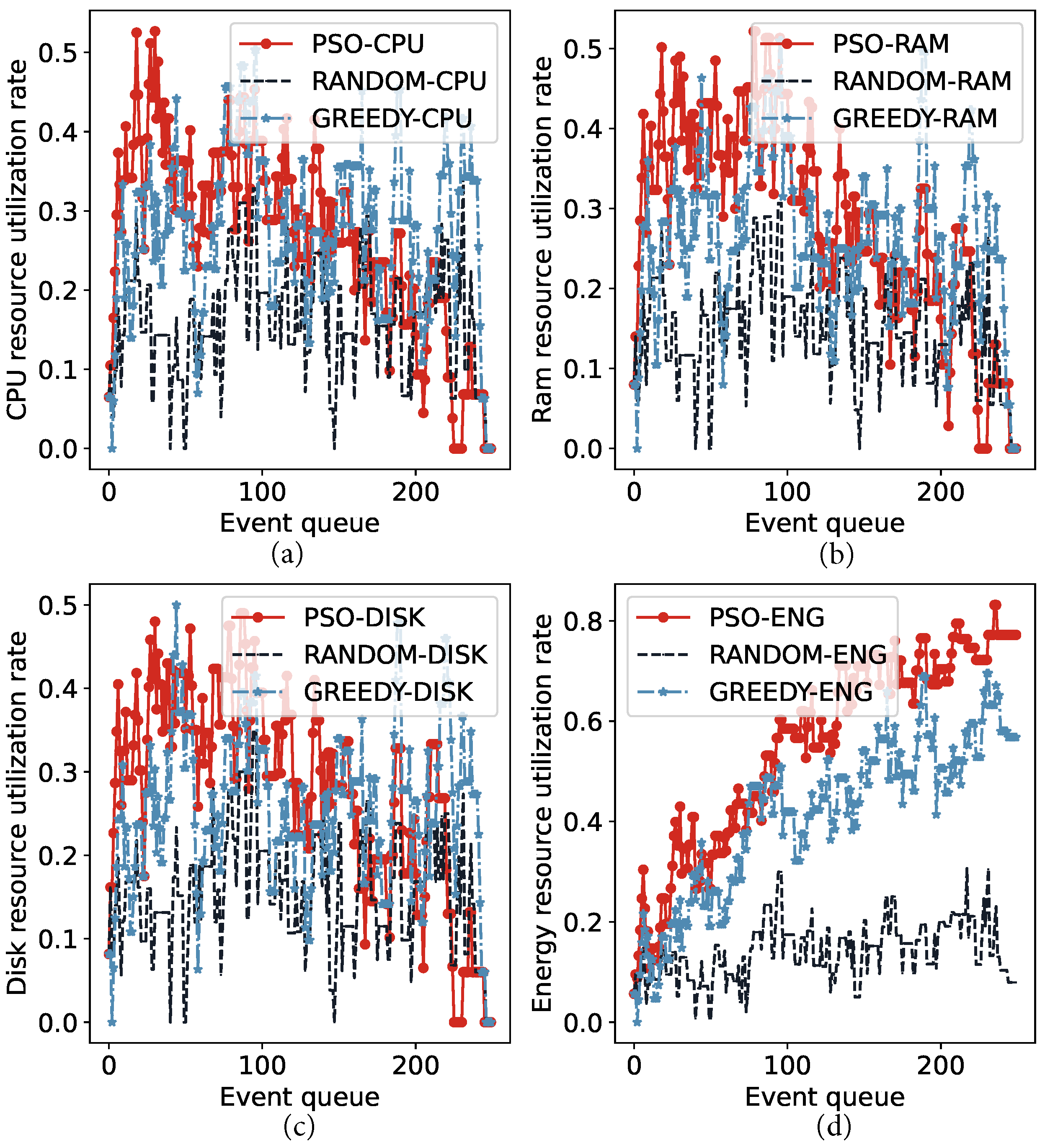
- The experimental results demonstrate that the proposed method outperforms the comparison algorithm in terms of SFC income, migration quality, and resource utilization, thus confirming the effectiveness and superiority of the proposed method.
2. Related Work
2.1. SFC Embedding
2.2. SFC Migration
3. System Model
3.1. Substrate Network Model
3.2. Service Function Chain Model
3.3. SFC Embedding Model
3.4. SFC Latency Model
3.4.1. Operation Latency
3.4.2. Remap Latency
3.4.3. Reroute Latency
3.5. SFC Revenue Model
3.6. Problem Formulation
3.7. Hardness Analysis
4. Algorithmic Descriptions
4.1. Particle Swarm Optimization for SFC Embedding
| Algorithm 1 Particle Swarm Optimization Algorithm for SFC Embedding | |
| Input: Current substrate network ; Current SFC request f; Dimension of particle position ; Max iterations ; Number of particles . | |
| Output: SFC embedding scheme node mapping and link mapping , indicating whether embedding succeeds. | |
| 1: | for all each particle i do |
| 2: | for all each dimension d do |
| 3: | Randomly initialize the particle position in the range [0,1]; |
| 4: | Randomly initialize the particle velocity in the range [0,1]; |
| 5: | end for |
| 6: | end for |
| 7: | Initialize current iteration number ; |
| 8: | while |
| 9: | for all each particle i do |
| 10: | Calculate fitness value with Equation (23); |
| 11: | if the fitness is less than the particle historical optimum then |
| 12: | Set the current fitness to ; |
| 13: | end if |
| 14: | end for |
| 15: | Select the smallest historical optimal fitness value among all particles as the global optimal fitness value ; |
| 16: | for all each particle i do |
| 17: | Calculate velocity according to the Equation (24); |
| 18: | Update particle position according to the Equation (25); |
| 19: | end for |
| 20: | ; |
| 21: | end while |
| 22: | if the fitness is the limiting value then |
| 23: | ,,; |
| 24: | else |
| 25: | Convert the global optimum fitness particle position to a node embedding scheme with Equation (20); |
| 26: | Solve the shortest path between embedded nodes with Dijkstra algorithm, and the link embedding scheme is obtained; |
| 27: | |
| 28: | end if |
| 29: | return ,,; |
4.2. Analysis of Convergence of Algorithm
5. Performance Evaluation
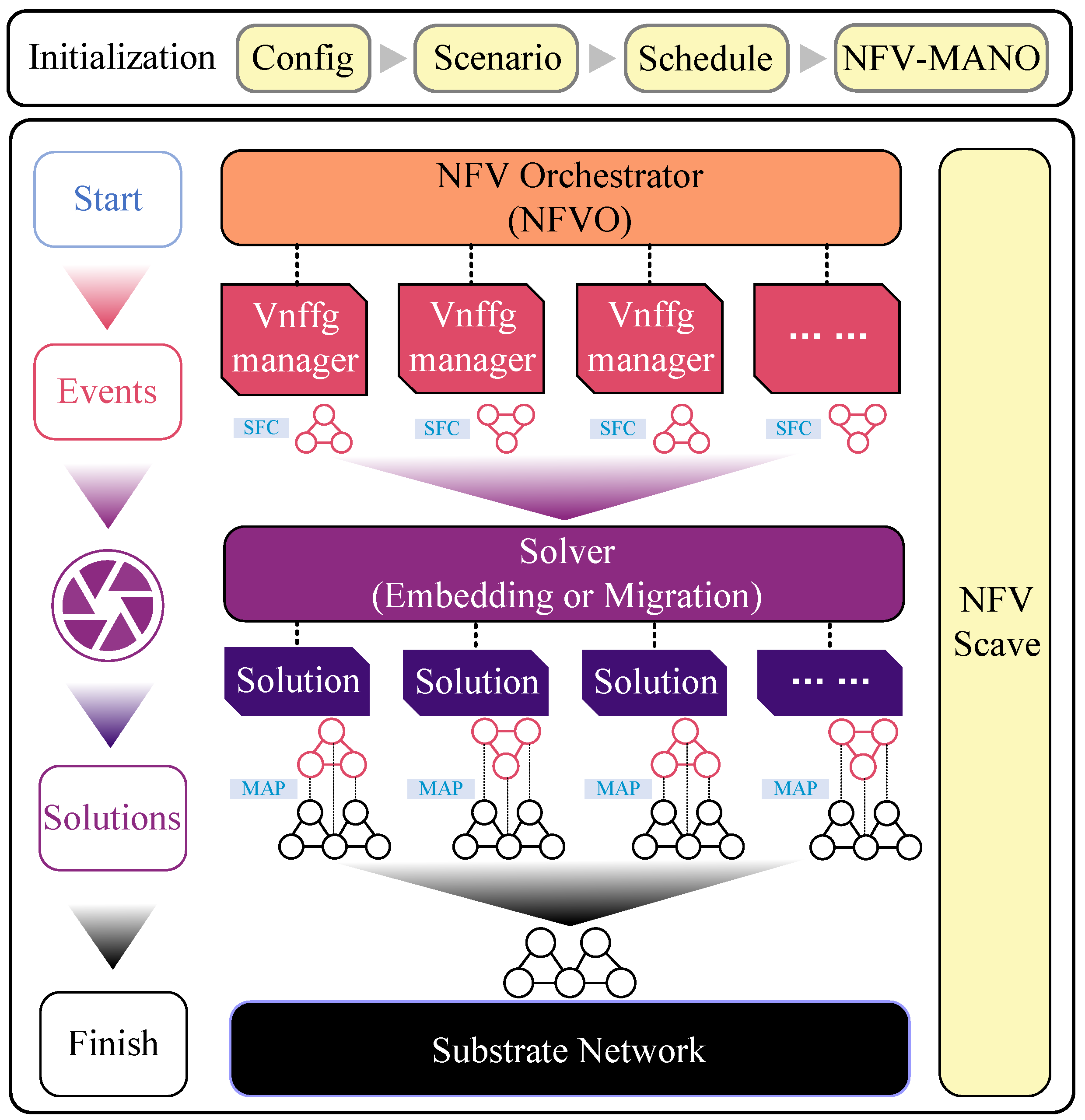
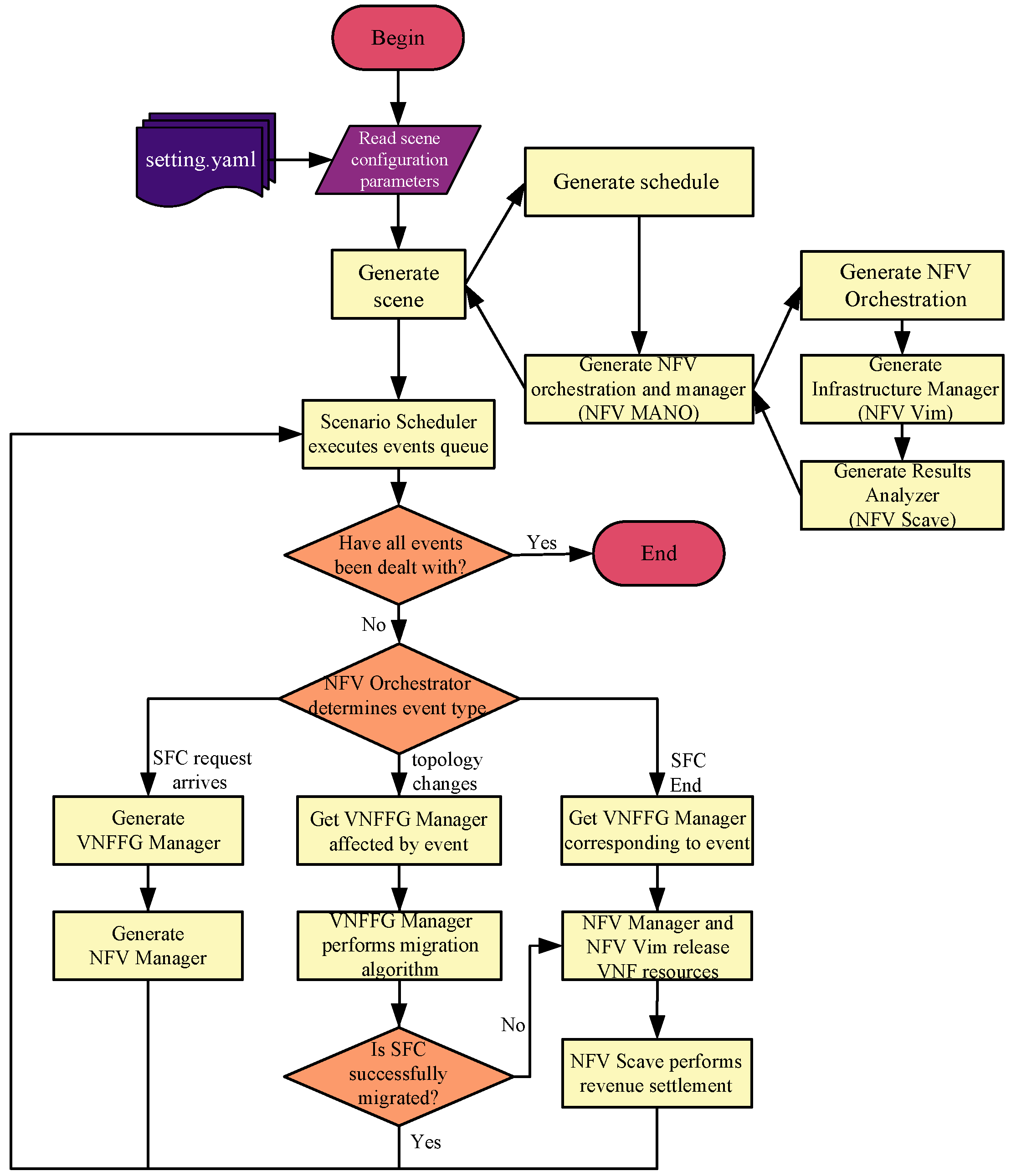
5.1. Simulation Model
- The initialization model is used to configure and schedule events in simulation scenarios, initialize all NFV-MANO modules, and make preparations for the simulation.
- The virtual network function orchestrator (VNFO) model is used to orchestrate and manage the SFC. This includes tasks such as creating, embedding, migrating, and destroying the SFC, as well as calculating the revenue model of the SFC and optimizing the objective function through a solver.
- The virtual network function forwarding graph (VNFFG) model describes the topology, functional requirements, and quality of service of the SFC, as well as the life cycle status of the SFC, including creation, embedding, running, migration, and destruction.
- The NFV Scave model is used to monitor and maintain SFC, which involves collecting and analyzing SFC operating status, performance indicators, energy consumption, and resources. It also includes making judgments and executing SFC migration trigger conditions.
5.2. Simulation Setting
5.3. Network Resource Consumption
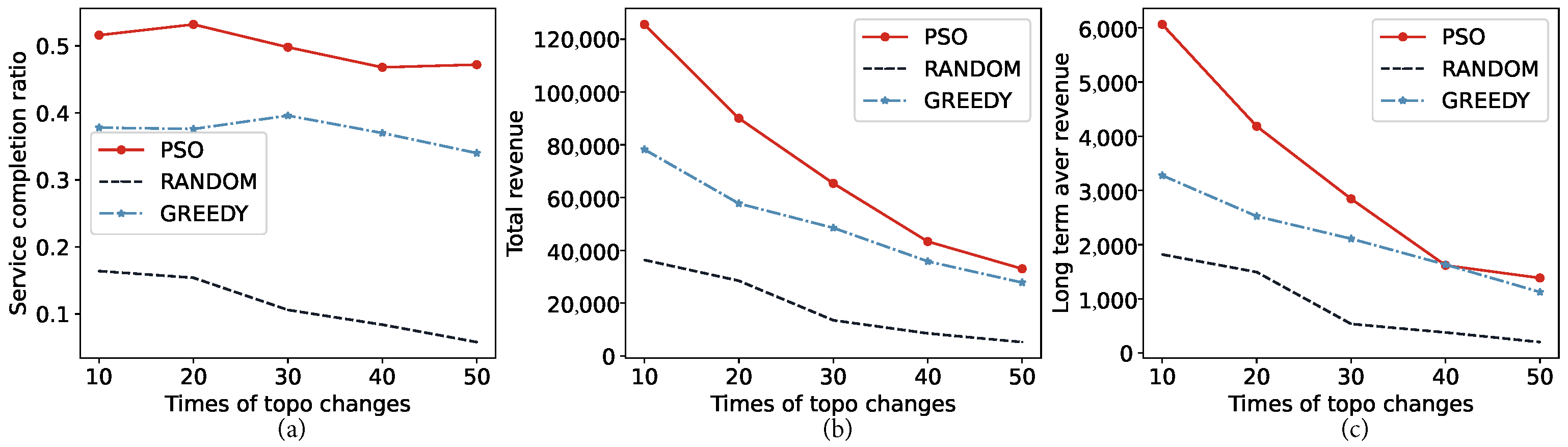
5.4. Impact of Topological Change
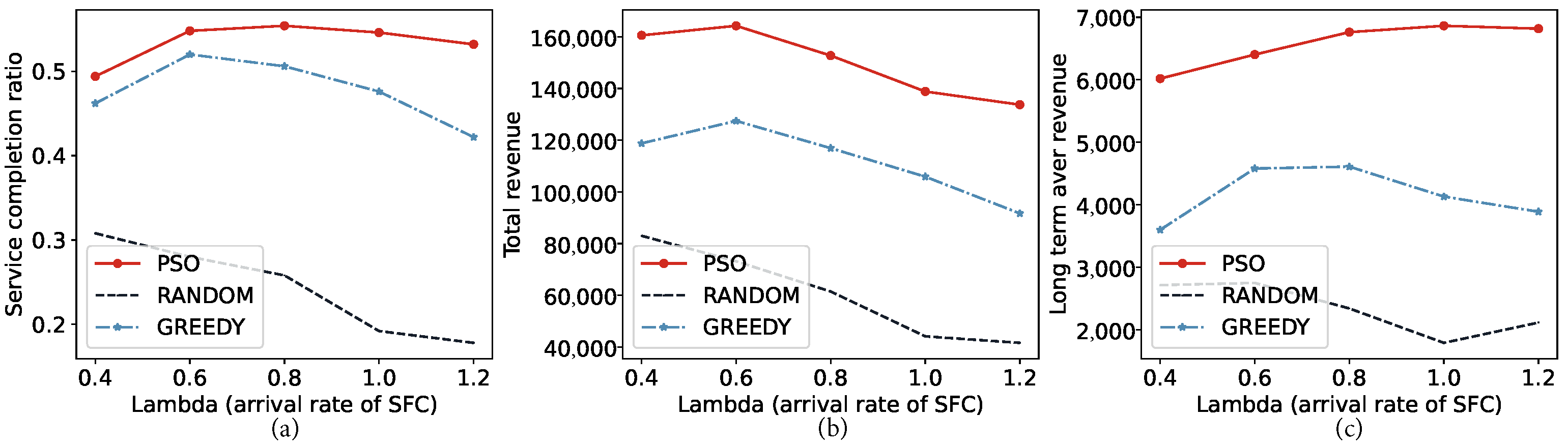
5.5. Impact of Workload
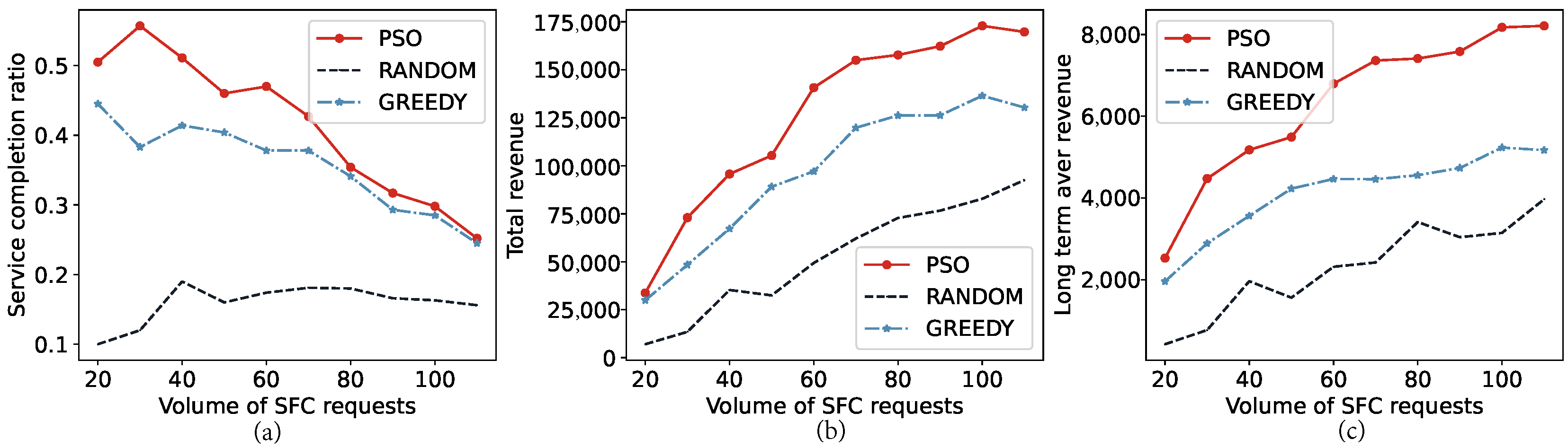
5.6. Impact on Volume of Services
6. Discussion and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chaumette, S.; Kim, J.H.; Namuduri, K.; Sterbenz, J.P.G. UAV Networks and Communications; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Zeng, Y.; Xu, X.; Jin, S.; Zhang, R. Simultaneous Navigation and Radio Mapping for Cellular-Connected UAV With Deep Reinforcement Learning. IEEE Trans. Wirel. Commun. 2021, 20, 4205–4220. [Google Scholar] [CrossRef]
- Qin, Y.; Guo, D.; Luo, L.; Zhang, J.; Xu, M. Service function chain migration with the long-term budget in dynamic networks. Comput. Netw. 2023, 223, 109563. [Google Scholar] [CrossRef]
- Attaoui, W.; Sabir, E.; Elbiaze, H.; Guizani, M. VNF and CNF Placement in 5G: Recent Advances and Future Trends. IEEE Trans. Netw. Serv. Manag. 2023, 20, 4698–4733. [Google Scholar] [CrossRef]
- Wijethilaka, S.; Liyanage, M. Survey on Network Slicing for Internet of Things Realization in 5G Networks. IEEE Commun. Surv. Tutorials 2021, 23, 957–994. [Google Scholar] [CrossRef]
- Wu, W.; Zhou, C.; Li, M.; Wu, H.; Zhou, H.; Zhang, N.; Shen, X.S.; Zhuang, W. AI-Native Network Slicing for 6G Networks. IEEE WIreless Commun. 2022, 29, 96–103. [Google Scholar] [CrossRef]
- Beck, M.T.; Fischer, A.; de Meer, H.; Botero, J.F.; Hesselbach, X. A distributed, parallel, and generic virtual network embedding framework. In Proceedings of the 2013 IEEE International Conference on Communications (ICC), Budapest, Hungary, 9–12 June 2013; pp. 3471–3475. [Google Scholar]
- Beck, M.T.; Botero, J.F. Coordinated Allocation of Service Function Chains. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015. [Google Scholar] [CrossRef]
- Tomassilli, A.; Giroire, F.; Huin, N.; Pérennes, S. Provably Efficient Algorithms for Placement of Service Function Chains with Ordering Constraints. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; pp. 774–782. [Google Scholar] [CrossRef]
- Sallam, G.; Gupta, G.R.; Li, B.; Ji, B. Shortest path and maximum flow problems under service function chaining constraints. In Proceedings of the IEEE Infocom 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; pp. 2132–2140. [Google Scholar]
- Jin, P.; Fei, X.; Zhang, Q.; Liu, F.; Li, B. Latency-aware VNF chain deployment with efficient resource reuse at network edge. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 267–276. [Google Scholar]
- Zheng, D.; Peng, C.; Liao, X.; Cao, X. Toward optimal hybrid service function chain embedding in multiaccess edge computing. IEEE Internet Things J. 2019, 7, 6035–6045. [Google Scholar] [CrossRef]
- Zheng, D.; Peng, C.; Liao, X.; Tian, L.; Luo, G.; Cao, X. Towards latency optimization in hybrid service function chain composition and embedding. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 1539–1548. [Google Scholar]
- Dimolitsas, I.; Dechouniotis, D.; Papavassiliou, S. Time-efficient distributed virtual network embedding for round-trip delay minimization. J. Netw. Comput. Appl. 2023, 217, 103691. [Google Scholar] [CrossRef]
- Vidal, I.; Nogales, B.; Valera, F.; Gonzalez, L.F.; Sanchez-Aguero, V.; Jacob, E.; Cervelló-Pastor, C. A multi-site NFV testbed for experimentation with SUAV-based 5G vertical services. IEEE Access 2020, 8, 111522–111535. [Google Scholar] [CrossRef]
- Carpio, F.; Bziuk, W.; Jukan, A. On optimal placement of hybrid service function chains (SFCs) of virtual machines and containers in a generic edge-cloud continuum. arXiv 2020, arXiv:2007.04151. [Google Scholar]
- Carpio, F.; Bziuk, W.; Jukan, A. Scaling migrations and replications of virtual network functions based on network traffic forecasting. Comput. Netw. 2022, 203, 108582. [Google Scholar] [CrossRef]
- Rui, L.; Chen, X.; Gao, Z.; Li, W.; Qiu, X.; Meng, L. Petri Net-Based Reliability Assessment and Migration Optimization Strategy of SFC. IEEE Trans. Netw. Serv. Manag. 2021, 18, 167–181. [Google Scholar] [CrossRef]
- Bai, J.; Chang, X.; Rodríguez, R.J.; Trivedi, K.S.; Li, S. Towards uav-based mec service chain resilience evaluation: A quantitative modeling approach. IEEE Trans. Veh. Technol. 2023, 72, 5181–5194. [Google Scholar] [CrossRef]
- Hu, Y.; Min, G.; Li, J.; Li, Z.; Cai, Z.; Zhang, J. VNF Migration in Digital Twin Network for NFV Environment. Electronics 2023, 12, 4324. [Google Scholar] [CrossRef]
- Boutin, E.; Ekanayake, J.; Lin, W.; Shi, B.; Zhou, J.; Qian, Z.; Wu, M.; Zhou, L. Apollo: Scalable and coordinated scheduling for cloud-scale computing. In Proceedings of the 11th USENIX Conference on Operating Systems Design and Implementation, Broomfield, CO, USA, 6–8 October 2014; pp. 285–300. [Google Scholar]
- Schneider, S.; Sharma, A.; Karl, H.; Wehrheim, H. Specifying and Analyzing Virtual Network Services Using Queuing Petri Nets. In Proceedings of the 2019 IFIP/IEEE Symposium on Integrated Network and Service Management (IM), Arlington, VA, USA, 8–12 April 2019; pp. 116–124. [Google Scholar]
- Li, J.; Wang, R.; Wang, K. Service Function Chaining in Industrial Internet of Things With Edge Intelligence: A Natural Actor-Critic Approach. IEEE Trans. Ind. Inform. 2023, 19, 491–502. [Google Scholar] [CrossRef]
- Su, S.; Zhang, Z.; Liu, A.X.; Cheng, X.; Wang, Y.; Zhao, X. Energy-Aware Virtual Network Embedding. IEEE/ACM Trans. Netw. 2014, 22, 1607–1620. [Google Scholar] [CrossRef]
- Wang, T.; Fan, Q.; Li, X.; Zhang, X.; Xiong, Q.; Fu, S.; Gao, M. DRL-SFCP: Adaptive Service Function Chains Placement with Deep Reinforcement Learning. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Rost, M.; Schmid, S. On the Hardness and Inapproximability of Virtual Network Embeddings. IEEE/ACM Trans. Netw. 2020, 28, 791–803. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm—Explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Castillo-Lema, J.; Venâncio Neto, A.; de Oliveira, F.; Takeo Kofuji, S. Mininet-NFV: Evolving Mininet with OASIS TOSCA NVF profiles Towards Reproducible NFV Prototyping. In Proceedings of the 2019 IEEE Conference on Network Softwarization (NetSoft), Paris, France, 24–28 June 2019; pp. 506–512. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| Set of substrate network nodes | |
| Each physical node in substrate network | |
| Set of substrate network links at time t | |
| Each physical link between node and node at time t | |
| Maximum resource capacity of node | |
| Remaining resource of node at time t | |
| Maximum resource capacity of link | |
| Remaining resource of link at time t | |
| “Wait-Time Matrix” for servers in physical node 1 | |
| Set of SFCs to be processed | |
| Set of virtual network nodes (VNFs) of SFC | |
| Each virtual node in SFC | |
| Set of virtual network links of SFC | |
| Each virtual link between VNF and VNF | |
| Resource need to be allocated of VNF | |
| Resource need to be allocated of virtual link | |
| ,, | Arrival time, life cycle, and end time of SFC |
| Transmission latency requirement of SFC | |
| Set of mapping indication between VNF in SFCf and physical node at time t | |
| Whether VNF is deployed on physical node at time t | |
| Set of mapping indication between virtual link in SFCf and physical link at time t | |
| Whether virtual link is embedded in physical link at time t | |
| , , , | Total latency, operation latency, remap and reroute latency of SFC at time t |
| System revenue of SFC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Shi, S.; Wu, C. Research on Service Function Chain Embedding and Migration Algorithm for UAV IoT. Drones 2024, 8, 117. https://doi.org/10.3390/drones8040117
Wang X, Shi S, Wu C. Research on Service Function Chain Embedding and Migration Algorithm for UAV IoT. Drones. 2024; 8(4):117. https://doi.org/10.3390/drones8040117
Chicago/Turabian StyleWang, Xi, Shuo Shi, and Chenyu Wu. 2024. "Research on Service Function Chain Embedding and Migration Algorithm for UAV IoT" Drones 8, no. 4: 117. https://doi.org/10.3390/drones8040117
APA StyleWang, X., Shi, S., & Wu, C. (2024). Research on Service Function Chain Embedding and Migration Algorithm for UAV IoT. Drones, 8(4), 117. https://doi.org/10.3390/drones8040117