
Saturated Trajectory Tracking Controller in the Body-Frame for Quadrotors

 , , ,
, , ,  and
and
Abstract
:1. Introduction
- A position control law developed in the body-fixed frame, incorporating an input normed saturation with a modular integral control component. This innovative approach ensures global asymptotic stability and presents a novel way of addressing the thrust and desired attitude extraction problem, distinguishing it from the majority of existing methods in the literature.
- The proposal of a novel trajectory tracking approach for quadrotors, characterized by almost global asymptotic stability and local exponential stability, exhibiting optimal steady-state properties within the linear region.
- The design of the controller is fine-tuned using the linear quadratic regulator framework, which optimizes for energy efficiency over time.
Notation
2. Problem Statement
2.1. Quadrotor Dynamics and Kinematics
2.2. Problem Formulation
3. Controller Design
3.1. Position Control
3.2. Saturated Control Law
3.3. Attitude Control—Quaternion
4. Implementation
Control Application-Steps
- Begin by computing the controller gains, as outlined in the initial part of Section 4;
- Set the maximum thrust and choose p and such that ;
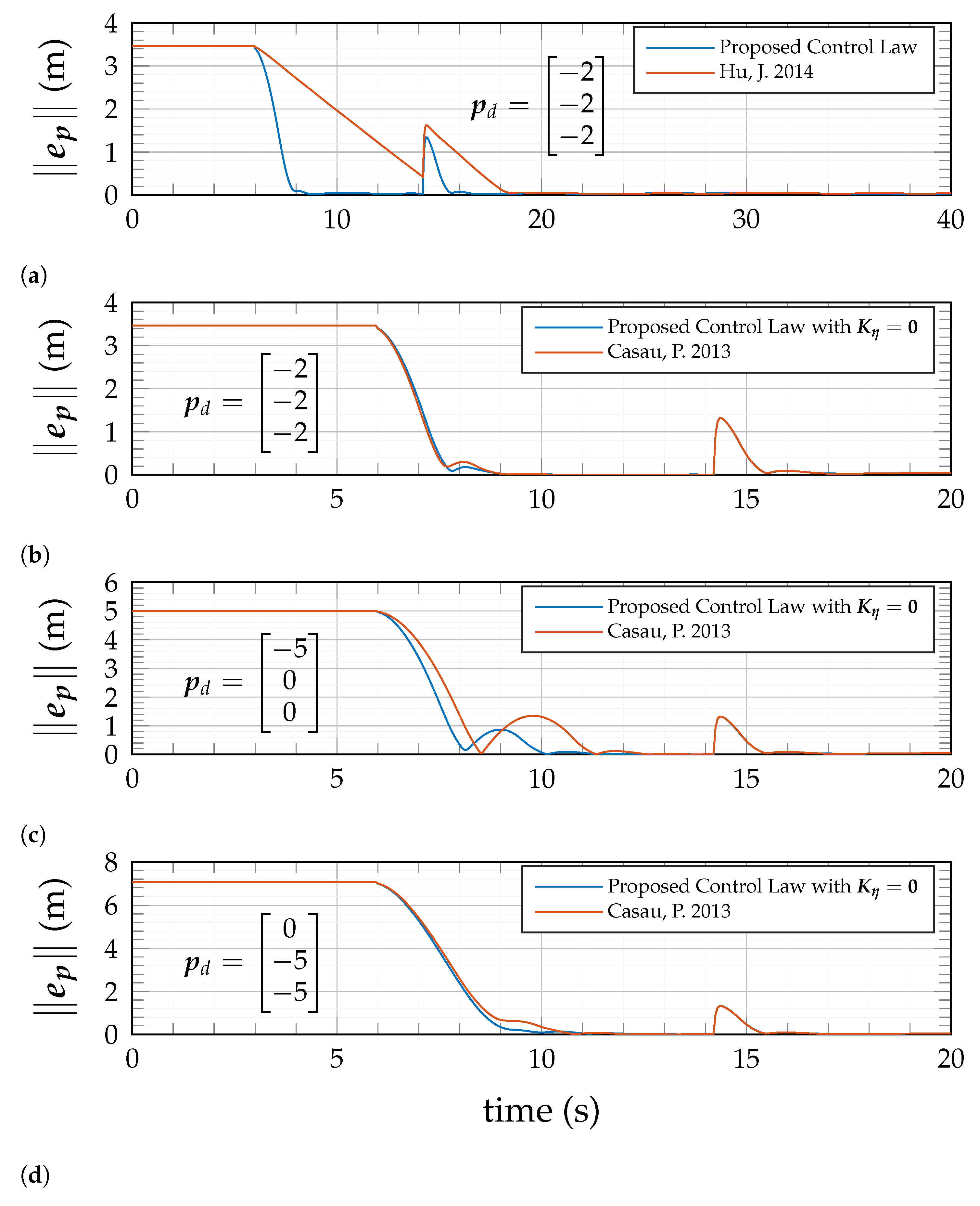
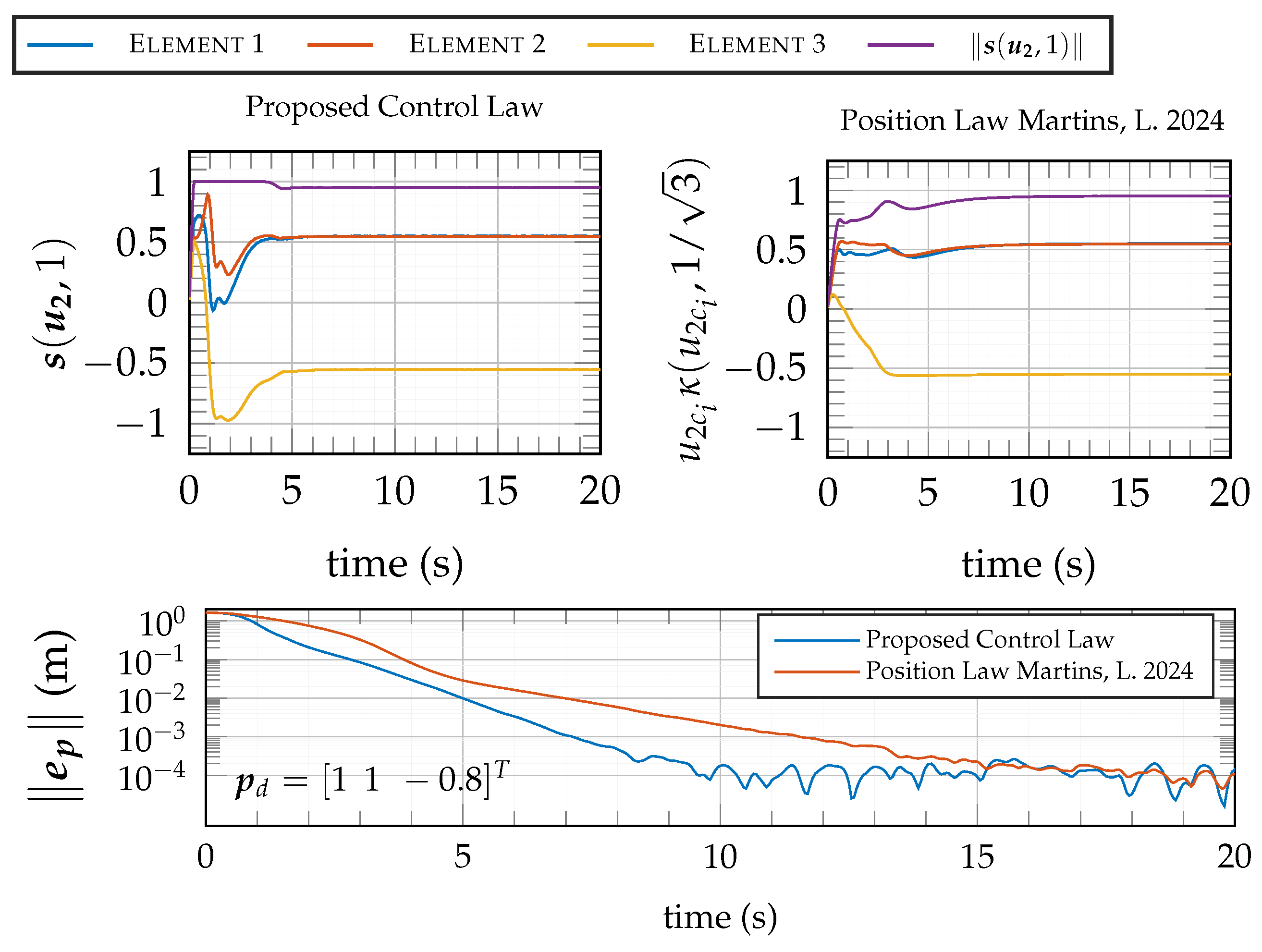
5. Simulation Results
Robustness Comparisons
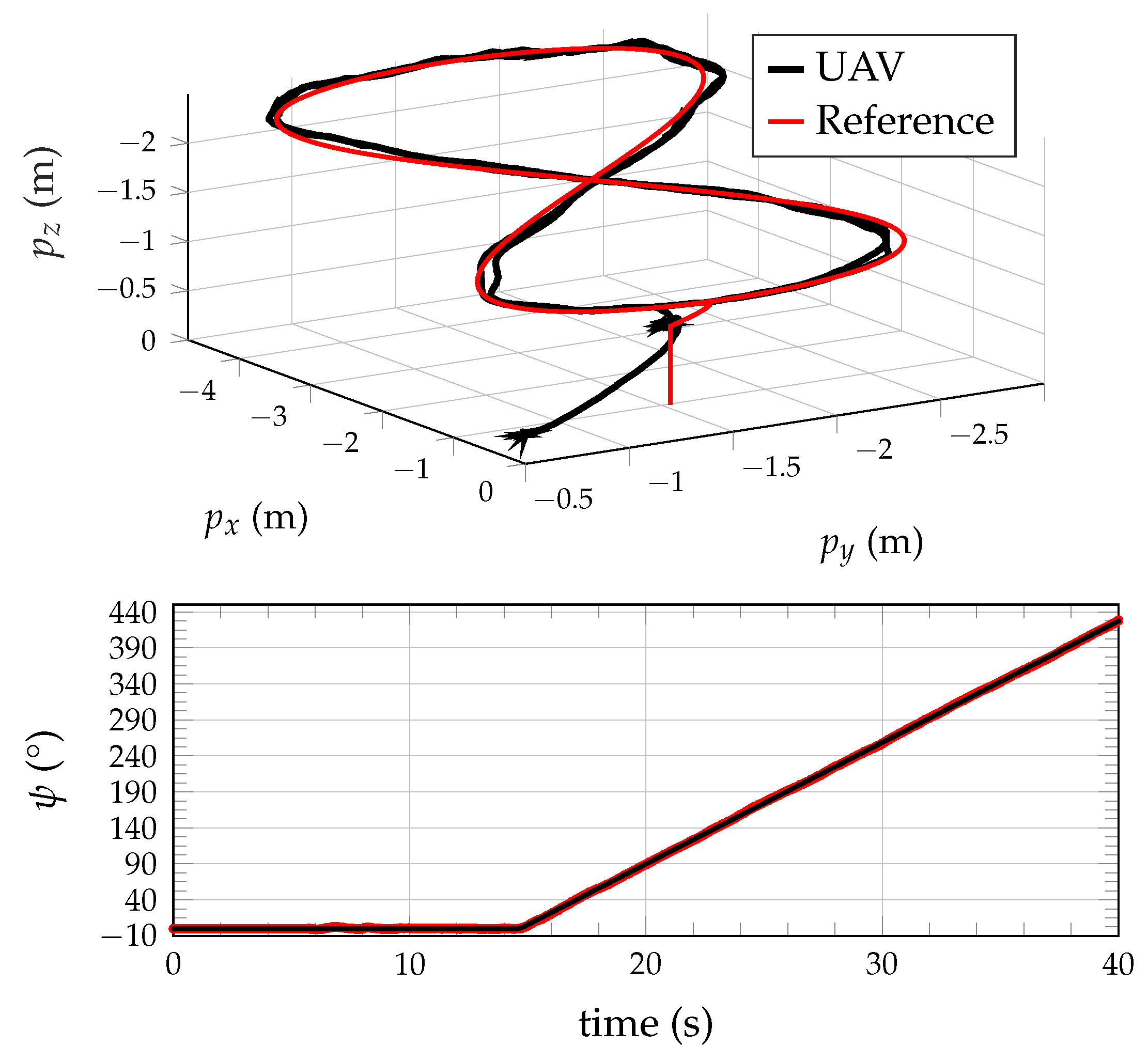
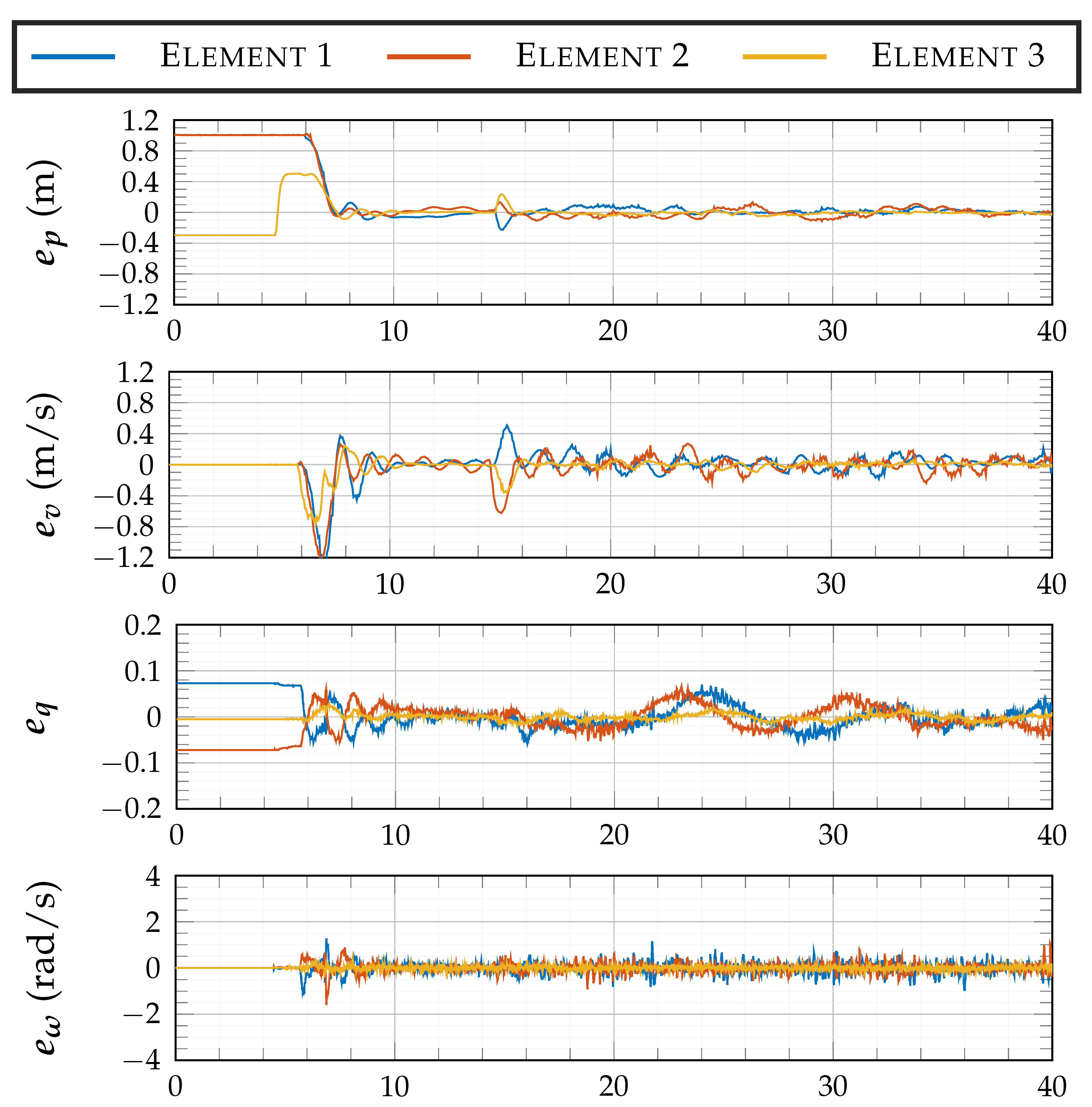
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Pounds, P.; Mahony, R.; Corke, P. Modelling and control of a large quadrotor robot. Control Eng. Pract. 2010, 18, 691–699. [Google Scholar] [CrossRef]
- Liang, H.; Lee, S.C.; Bae, W.; Kim, J.; Seo, S. Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection. Drones 2023, 7, 202. [Google Scholar] [CrossRef]
- Hua, M.D.; Hamel, T.; Morin, P.; Samson, C. Introduction to feedback control of underactuated VTOLvehicles: A review of basic control design ideas and principles. IEEE Control Syst. Mag. 2013, 33, 61–75. [Google Scholar] [CrossRef]
- Emran, B.J.; Najjaran, H. A review of quadrotor: An underactuated mechanical system. Annu. Rev. Control 2018, 46, 165–180. [Google Scholar] [CrossRef]
- Sonugür, G. A Review of quadrotor UAV: Control and SLAM methodologies ranging from conventional to innovative approaches. Robot. Auton. Syst. 2023, 161, 104342. [Google Scholar] [CrossRef]
- Wan, M.; Chen, M.; Lungu, M. Integral Backstepping Sliding Mode Control for Unmanned Autonomous Helicopters Based on Neural Networks. Drones 2023, 7, 154. [Google Scholar] [CrossRef]
- Martins, L.; Cardeira, C.; Oliveira, P. Linear Quadratic Regulator for Trajectory Tracking of a Quadrotor. IFAC-PapersOnLine 2019, 52, 176–181. [Google Scholar] [CrossRef]
- Martins, L.; Cardeira, C.; Oliveira, P. Feedback Linearization with Zero Dynamics Stabilization for Quadrotor Control. J. Intell. Robot. Syst. 2021, 101, 1–17. [Google Scholar] [CrossRef]
- Ha, C.; Zuo, Z.; Choi, F.B.; Lee, D. Passivity-based adaptive backstepping control of quadrotor-type UAVs. Robot. Auton. Syst. 2014, 62, 1305–1315. [Google Scholar] [CrossRef]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- Invernizzi, D.; Lovera, M. Trajectory tracking control of thrust-vectoring UAVs. Automatica 2018, 95, 180–186. [Google Scholar] [CrossRef]
- Invernizzi, D.; Lovera, M.; Zaccarian, L. Integral ISS-Based Cascade Stabilization for Vectored-Thrust UAVs. IEEE Control Syst. Lett. 2020, 4, 43–48. [Google Scholar] [CrossRef]
- Gamagedara, K.; Bisheban, M.; Kaufman, E.; Lee, T. Geometric Controls of a Quadrotor UAV with Decoupled Yaw Control. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3285–3290. [Google Scholar] [CrossRef]
- Martins, L.; Cardeira, C.; Oliveira, P. Global trajectory tracking for quadrotors: An MRP-based hybrid strategy with input saturation. Automatica 2024, 162, 111521. [Google Scholar] [CrossRef]
- Control of VTOL Vehicles with Thrust-Tilting Augmentation. IFAC Proc. Vol. 2014, 47, 2237–2244. [CrossRef]
- Naldi, R.; Furci, M.; Sanfelice, R.G.; Marconi, L. Robust Global Trajectory Tracking for Underactuated VTOL Aerial Vehicles Using Inner-Outer Loop Control Paradigms. IEEE Trans. Autom. Control 2017, 62, 97–112. [Google Scholar] [CrossRef]
- Quadrotor trajectory generation and tracking for aggressive maneuvers with attitude constraints. IFAC-Pap. 2019, 52, 55–60.
- Cabecinhas, D.; Cunha, R.; Silvestre, C. A Globally Stabilizing Path Following Controller for Rotorcraft with Wind Disturbance Rejection. IEEE Trans. Control Syst. Technol. 2015, 23, 708–714. [Google Scholar] [CrossRef]
- Cabecinhas, D.; Cunha, R.; Silvestre, C. A nonlinear quadrotor trajectory tracking controller with disturbance rejection. Control Eng. Pract. 2014, 26, 1–10. [Google Scholar] [CrossRef]
- Casau, P.; Sanfelice, R.G.; Cunha, R.; Cabecinhas, D.; Silvestre, C. Robust global trajectory tracking for a class of underactuated vehicles. Automatica 2015, 58, 90–98. [Google Scholar] [CrossRef]
- Xie, W.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Adaptive Backstepping Control of a Quadcopter with Uncertain Vehicle Mass, Moment of Inertia, and Disturbances. IEEE Trans. Ind. Electron. 2021, 69, 549–559. [Google Scholar] [CrossRef]
- Nicotra, M.M.; Garone, E. Explicit reference governor for continuous time nonlinear systems subject to convex constraints. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 4561–4566. [Google Scholar] [CrossRef]
- Osorio, J. Reference Governors: From Theory to Practice. Ph.D. Thesis, Electrical Engineering Department, University of Vermont, Burlington, VT, USA, 2020. [Google Scholar]
- Nicotra, M.; Naldi, R.; Garone, E. A robust explicit reference governor for constrained control of Unmanned Aerial Vehicles. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 6284–6289. [Google Scholar] [CrossRef]
- Convens, B.; Merckaert, K.; Nicotra, M.; Naldi, R.; Garone, E. Control of Fully Actuated Unmanned Aerial Vehicles with Actuator Saturation. In Proceedings of the IFAC 2017 World Congress, Toulouse, France, 9–14 July 2017. [Google Scholar] [CrossRef]
- Bhat, S.; Bernstein, D. A topological obstruction to global asymptotic stabilization of rotational motion and the unwinding phenomenon. In Proceedings of the 1998 American Control Conference. ACC (IEEE Cat. No.98CH36207), Philadelphia, PA, USA, 26 June 1998; Volume 5, pp. 2785–2789. [Google Scholar]
- Optimal position and velocity navigation filters for autonomous vehicles. Automatica 2010, 46, 767–774. [CrossRef]
- Cao, N.; Lynch, A.F. Inner–Outer Loop Control for Quadrotor UAVs With Input and State Constraints. IEEE Trans. Control Syst. Technol. 2016, 24, 1797–1804. [Google Scholar] [CrossRef]
- Allibert, G.; Abeywardena, D.; Bangura, M.; Mahony, R. Estimating Body-Fixed Frame Velocity and Attitude from Inertial Measurements for a Quadrotor Vehicle. In Proceedings of the 2014 IEEE Conference on Control Applications, CCA 2014, Antibes/Nice, France, 8–10 October 2014. [Google Scholar]
- Lefeber, E.; van den Eijnden, S.; Nijmeijer, H. Almost global tracking control of a quadrotor UAV on SE(3). In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; pp. 1175–1180. [Google Scholar] [CrossRef]
- Front Matter. In Optimal Control; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2012; pp. i–xii. [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Bani Younes, A.; Mortari, D. Derivation of All Attitude Error Governing Equations for Attitude Filtering and Control. Sensors 2019, 19, 4682. [Google Scholar] [CrossRef] [PubMed]
- Sepulchre, R.; Jankovic, M.; Kokotovic, P. Constructive Nonlinear Control; Communications and Control Engineering; Springer: London, UK, 1997. [Google Scholar]
- Schlanbusch, R.; Loria, A.; Nicklasson, P.J. On the stability and stabilization of quaternion equilibria of rigid bodies. Automatica 2012, 48, 3135–3141. [Google Scholar] [CrossRef]
- Mayhew, C.G.; Sanfelice, R.G.; Teel, A.R. Quaternion-Based Hybrid Control for Robust Global Attitude Tracking. IEEE Trans. Autom. Control 2011, 56, 2555–2566. [Google Scholar] [CrossRef]
- Loria, A.; Panteley, E.; Popovic, D.; Teel, A. A nested Matrosov theorem and persistency of excitation for uniform convergence in stable nonautonomous systems. IEEE Trans. Autom. Control 2005, 50, 183–198. [Google Scholar] [CrossRef]
- Mayhew, C.G.; Sanfelice, R.G.; Teel, A.R. Robust global asymptotic attitude stabilization of a rigid body by quaternion-based hybrid feedback. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 2522–2527. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, H. Globally asymptotically stable saturated PID controllers for a double integrator with constant disturbance. Int. J. Robust Nonlinear Control 2014, 24. [Google Scholar] [CrossRef]
- Casau, P.; Sanfelice, R.G.; Cunha, R.; Cabecinhas, D.; Silvestre, C. Global trajectory tracking for a class of underactuated vehicles. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 419–424. [Google Scholar] [CrossRef]
- Lee, D.A.R. Drone 2.0 Support from Embedded Coder. 2016. Available online: https://www.mathworks.com/hardware-support/ar-drone.html (accessed on 17 April 2024).
- Mironchenko, A. Input-to-State Stability: Theory and Applications; Springer: Cham, Switzerland, 2023. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (55) | (55) | (55) | |||||
|---|---|---|---|---|---|---|---|
| 93 | 20 | 0.1 | 0.02 |
| 0.0373 | 0.0580 | 0.0189 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Madeiras, J.; Cardeira, C.; Oliveira, P.; Batista, P.; Silvestre, C. Saturated Trajectory Tracking Controller in the Body-Frame for Quadrotors. Drones 2024, 8, 163. https://doi.org/10.3390/drones8040163
Madeiras J, Cardeira C, Oliveira P, Batista P, Silvestre C. Saturated Trajectory Tracking Controller in the Body-Frame for Quadrotors. Drones. 2024; 8(4):163. https://doi.org/10.3390/drones8040163
Chicago/Turabian StyleMadeiras, João, Carlos Cardeira, Paulo Oliveira, Pedro Batista, and Carlos Silvestre. 2024. "Saturated Trajectory Tracking Controller in the Body-Frame for Quadrotors" Drones 8, no. 4: 163. https://doi.org/10.3390/drones8040163
APA StyleMadeiras, J., Cardeira, C., Oliveira, P., Batista, P., & Silvestre, C. (2024). Saturated Trajectory Tracking Controller in the Body-Frame for Quadrotors. Drones, 8(4), 163. https://doi.org/10.3390/drones8040163